
Abstract
Purpose
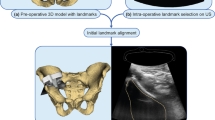
Within the CRANIO project, a navigation module based on preoperative computed tomography (CT) data was developed for Computer and Robot Assisted Neurosurgery. The approach followed for non-invasive user-interactive registration of cranial CT images with the physical operating space consists of surface-based registration following pre-registration based on anatomical landmarks. Surface-based registration relies on bone surface points digitized transcutaneously by means of an optically tracked A-mode ultrasound (US) probe. As probe alignment and thus bone surface point digitization may be time-consuming, we investigated how to obtain high registration accuracy despite inaccurate pre-registration and a limited number of digitized bone surface points. Furthermore, we aimed at efficient man-machine-interaction during the probe alignment process. Finally, we addressed the problem of registration plausibility estimation in our approach.
Method
We modified the Iterative Closest Point (ICP) algorithm, presented by Besl and McKay and frequently used for surface-based registration, such that it can escape from local minima of the cost function to be iteratively minimized. The random-based ICP (R-ICP) we developed is less influenced by the quality of the pre-registration as it can escape from local minima close to the starting point for iterative optimization in the 6D domain of rigid transformations. The R-ICP is also better suited to approximate the global minimum as it can escape from local minima in the vicinity of the global minimum, too. Furthermore, we developed both CT-less and CT-based probe alignment tools along with appropriate man-machine strategies for a more time-efficient palpation process. To improve registration reliability, we developed a simple plausibility test based on data readily available after registration.
Results
In a cadaver study, where we evaluated the R-ICP algorithm, the probe alignment tools, and the plausibility test, the R-ICP algorithm consistently outperformed the ICP algorithm. Almost no influence of the pre-registration on the final R-ICP registration accuracy could be observed. The probe alignment tools were judged to be useful and allowed for the digitization of 18 bone surface points within 2 min on average. The plausibility test was helpful to detect poor registration accuracy.
Conclusion
The R-ICP algorithm can provide high registration accuracy despite inaccurate pre-registration and a very limited number of data points. R-ICP registration was shown to be practical and robust versus the quality of the pre-registration. Time-efficiency of the cranial palpation process may be greatly increased and should encourage clinical acceptance.
Similar content being viewed by others


References
Amin DV, Kanade T, DiGioia AM III, Jaramaz B (2003) Ultrasound registration of the bone surface for surgical navigation. Comput Aided Surg 8(1): 1–16
Amstutz C, Caversaccio M, Kowal J, Bächler R, Nolte LP, Häusler R, Styner M (2003) A-mode ultrasound-based registration in computer-aided surgery on the skull. Arch Otolaryngol Head Neck Surg 129: 1310–1316
Bächler R, Bunke H, Nolte LP (2001) Restricted surface matching—numerical optimization and technical evaluation. Comput Aided Surg 6(3): 143–152
Bast P, Engelhardt M, Lauer W, Schmieder K, Rohde V, Radermacher K (2003) Identification of milling parameters for manual cutting of bicortical bone structures. Comput Aided Surg 8(5): 257–263
Bast P, Popovic A, Wu T, Heger S, Engelhardt M, Lauer W, Radermacher K, Schmieder K (2006) Robot- and computer-assisted craniotomy: resection planning, implant modelling and robot safety. Int J Med Robot 2(2): 168–178
Besl PJ, McKay ND (1992) A method for registration of 3d shapes. IEEE Trans PAMI 14(2): 239–256
Chetverikov D, Svirko D, Stepanov D, Krsek P (2002) The trimmed iterative closest point algorithm. Proc ICPR 3: 545–548
Eggers G, Mühling J, Marmulla R (2006) Image-to-patient registration techniques in head surgery. Int J Oral Maxillofac Surg 35: 1081–1095
Follmann A, Popovic A, Wu T, Cunha Cruz VVC, Schröder K, Ibach B, Radermacher K (2007) CRANIO system for robot and computer assisted removal of calvarial tumors. Int J CARS 2(l): 484–485
Friedman JH, Baskett F, Shustek LJ (1975) An algorithm for finding nearest neighbors. IEEE Trans Comput 24: 1000–1006
Glozman D, Shoham M, Fischer A (2001) A surface-matching technique for robot-assisted registration. Comput Aided Surg 6(5): 259–269
Granger S, Pennec X, Roche A (2001) Rigid point-surface registration using oriented points and an em variant of icp for computer guided oral implantology. Technical report 4169, INRIA
Grunert P, Darabi K, Espinosa J, Filippi R (2003) Computer aided navigation in neurosurgery. Neurosurg Rev 26: 73–99
Guinand N, Amstutz CA, Kowal J, Nolte LP, Häusler R, Caversaccio M (2001) Noninvasive registration in head surgery by A-mode ultrasound. In: Proc CAOS, p 81
Heger S, Radermacher K (2003) Automatic calibration procedure for optically tracked A-mode ultrasound based registration. In: Proc. CAOS, pp 138–139
Heger S, Portheine F, Ohnsorge JAK, Schkommodau E, Radermacher K (2005) User interactive registration of bone with A-mode ultrasound. IEEE Eng Med Biol Mag 24(2): 85–95
Horn BKP (1987) Closed-form solution of absolute orientation using unit quaternions. J Opt Soc Am A 4(4): 629–642
Maintz JBA, Viergever MA (1998) A survey of medical image registration. Med Image Anal 2(1): 1–37
Masuda T, Sakaue K, Yokoya N (1996) Registration and integration of multiple range images for 3D model reconstruction. Proc ICPR 1: 879–883
Maurer CR Jr, Fitzpatrick JM, Wang MY, Galloway RL Jr, Maciunas RJ, Allen GS (1997) Registration of head volume images using implantable fiducial markers. IEEE Trans Med Imag 16: 447–462
Maurer CR Jr, Maciunas RJ, Fitzpatrick JM (1998) Registration of head CT images to physical space using a weighted combination of points and surfaces. IEEE Trans Med Imaging 17(5): 753–761
Maurer CR Jr, Gaston RP, Hill DLG, Gleeson MJ, Taylor MG, Fenlon MR, Edwards PJ, Hawkes DJ (1999) AcouStick: a tracked a-mode ultrasonography system for registration in image-guided surgery. In: Proc MICCAI. LNCS, vol 1679, pp 953–962
Popovic A, Engelhardt M, Wu T, Portheine F, Schmieder K, Radermacher K (2003) CRANIO—Computer assisted planning for navigated and robot assisted surgery on the skull. In: Proc CARS, pp 1269–1275
Popovic A, Engelhardt M, Heger S, Radermacher K (2005) Efficient non-invasive registration with a-mode ultrasound in skull surgery: method and first clinical trials. In: Proc CARS, pp 821–826
Pulli K (1999) Multiview registration for large data sets. In: Proc 3DIM, pp 160–168
Rusinkiewicz S, Levoy M (2001) Efficient variants of the ICP algorithm. In: Proc 3DIM, pp 145–152
Schreiner S, Galloway RL Jr, Lewis JT, Bass WA, Muratore DM (1998) An ultrasonic approach to localization of fiducial markers for interactive, image-guided neurosurgery–Part II: Implementation and automation. IEEE Trans Biomed Eng 45(5): 631–641
Simon D (1996) Fast and accurate shape-based registration. Doctoral Dissertation, Robotics Institute, Carnegie Mellon University
Wolfsberger S, Rössler K, Regatschnig R, Ungersböck K (2002) Anatomical landmarks for image registration in frameless stereotactic neuronavigation. Neurosurg Rev 25: 68–72
Wu T, Engelhardt M, Fieten L, Popovic A, Radermacher K (2006) Anatomically constrained deformation for design of cranial implant: methodology and validation. In: Proc MICCAI. LNCS, vol 4190, pp 9–16
Zhang Z (1994) Iterative point matching for registration of free-form curves and surfaces. Int J Comput Vision 13(2): 119–152
Zinßer T, Schmidt J, Niemann H (2003) Performance analysis of nearest neighbor algorithms for icp registration of 3d point sets. In: Proc VMV, pp 199–206
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Fieten, L., Schmieder, K., Engelhardt, M. et al. Fast and accurate registration of cranial CT images with A-mode ultrasound. Int J CARS 4, 225–237 (2009). https://doi.org/10.1007/s11548-009-0288-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-009-0288-z