
Abstract
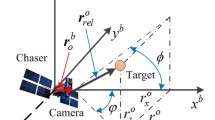
This paper considers the problem of angles-only relative navigation for autonomous rendezvous. Methods for determining degree of observability (DOO) and latent range information of orbital maneuver are proposed for analyzing and enhancing the precision of relative position and velocity estimation. The equations of angles-only relative navigation are set forth on the condition that optical camera is the only viable sensor for relative measurement, and expressions for the DOO of relative navigation are obtained by using the Newton iterative method. The latent range information of orbital maneuver is analyzed, which is employed to enhance the DOO of angles-only relative navigation. Simulation result shows that DOO is effective to describe the observability level of relative position and velocity, and the latent range information is useful in enhancing the DOO of the angles-only relative navigation.
Similar content being viewed by others

References
Fehse W. Automated Rendezvous and Docking of Spacecraft. Cambridge: Cambridge University Press, 2003
Tang G J, Luo Y Z, Zhang J. Mission Planning for Space Rendezvous and Docking (in Chinese). Beijing: Science Press, 2008
Lin L X. The Technology of Space Rendezvous and Docking (in Chinese). Beijing: Publisher of National Defense Industry, 1995
Woffinden D C, Geller D K. Navigating the road to autonomous orbital rendezvous. J Spacecraft Rocket, 2007, 44(4): 898–909
Clohessy W H, Wiltshire R S. Terminal guidance system for satellite rendezvous. J Aeros Sci, 1960, 27(9): 653–658
Hablani H B, Tapper M L, Bashian D D. Guidance algorithms for autonomous rendezvous of spacecraft with a target vehicle in circular orbit. J Guid, Contr, Dynam, 2002, 25(3): 553–562
Hablani H B. Autonomous relative navigation, attitude determination, pointing and tracking for spacecraft rendezvous. AIAA 2003-5355, 2003
Liu T, Xie Y C. A study on relative navigation for spacecraft rendezvous with a noncooperative target (in Chinese). Aerosp Contr, 2006, 24(2): 48–53
Zhao C S, Qin Y Y, Wang X Z, et al. Indirect measurement-based relative navigation (in Chinese). J Astron, 2008, 29(3): 864–867
Liu Y, Xu S J. Relative navigation for non-cooperative spacecraft based on second step multiple model estimation (in Chinese). J Astron, 2008, 29(2): 576–580
Nardone S C, Aidala V J. Observability criteria for bearings-only tracking. IEEE T Aero Elec Sys, 1981, 17(2): 162–166
Nardone S C, Graham M L. A closed-form solution to bearings-only target motion analysis. IEEE J Ocean Eng, 1997, 22(1): 168–178
Passerieux J M, Cappel D V. Optimal observer maneuver for bearings-only tracking. IEEE T Aero Elec Sys, 1998, 34(3): 777–788
Oshman Y, Davidson P. Optimization of observer trajectories for bearings-only target localization. IEEE T Aero Elec Sys, 1999, 35(3): 892–902
Chari R J V. Autonomous Orbital Rendezvous Using Angles-only Navigation. Dissertation of Masteral Degree. Boston: MIT, 2001
Wodffinden D C, Geller D K. Relative angles-only navigation and pose estimation for autonomous orbital rendezvous. J Guid, Contr, Dynam, 2007, 30(5): 1455–1469
Wodffinden D C, Geller D K. Observability criteria for angles-only navigation. In: AAS/AIAA Astrodynamics Specialist Conference and Exhibit, Mackinac Island, MI, 2007. 07-402
Wodffinden D C, Geller D K. Optimal orbital rendezvous maneuvering for angles-only navigation. J Guid, Contr, Dynam, 2009, 32(4): 1382–1387
Wodffinden D C. Angles-only navigation for autonomous orbital rendezvous. Dissertation of Doctoral Degree. Logan UT: Utah State Univ, 2008
Schmidt J, Lovell T A. Estimating geometric aspects of relative satellite motion using angles-only measurements. In: AAS/AIAA Astrodynamics Specialist Conference and Exhibit, Honolulu, Hawaii, 2008. 08-6604
Cheng X H, Wan D J, Zhong X. Study on observability and its degree of strapdown inertial navigation system (in Chinese). J Southeast U, 1997, 27(6): 6–11
Liu B Q, Fang J C. A new adaptive feedback kalman filter based on-observability analysis for SINS/GPS (in Chinese). Aeronautica et Astronautica Sinica, 2008, 29(2): 430–436.
Liu Z, Chen Z. Application of condition number in analysis observability of system (in Chinese). J Syst Simul, 2004, 16(7): 1552–1555
Sun Z K, Zhou Y Y, He L X. Single/Multibase Active and Passive Location Technology (in Chinese). Beijing: National Defence Industry Press, 1996
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Li, J., Li, H., Tang, G. et al. Research on the strategy of angles-only relative navigation for autonomous rendezvous. Sci. China Technol. Sci. 54, 1865–1872 (2011). https://doi.org/10.1007/s11431-011-4442-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-011-4442-9