
Abstract
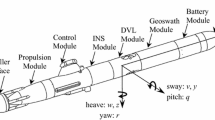
This work addresses the problem of optimal positioning for an intervention AUV, minimizing the energy consumption and improving the stability in orientation. During a generic intervention task, the vehicle is generally maintained in a hovering configuration, thus requiring a 6 DOF control of the vehicle positioning. The choice of roll and pitch, if done arbitrarily, can severely impact the power efficiency of the vehicle, especially in heavy systems, since the center of buoyancy (COB) may not be necessarily aligned over the center of mass (COM). This approach uses an Extended Kalman Filter (EKF) to identify the location of the center of buoyancy relative to the center of mass, thus allowing to compute the working orientation that maintains the COB vertically aligned above the COM. The EKF is implemented online and hence is able to detect movements of the COB due for example to ballast operations. This algorithm has been firstly implemented in simulation and then successfully validated with the SAUVIM (Semi-Autonomous Underwater Vehicle for Intervention Missions) autonomous underwater vehicle. With its weight of about 4 tons, this testbed is an optimal platform for validating the precision of the filter, since a very small variation of the target pitch and roll results in a large restoring torque.
Similar content being viewed by others


References
Antonelli G (2006) Underwater robots, 2nd edn. Springer, Berlin
Antonelli G, Caccavale F, Chiaverini S, Fusco G (2001) A novel adaptive control law for autonomous underwater vehicles. In: Proceedings of the IEEE international conference on robotics and automation, ICRA 2001, vol 1, pp 447–452. doi:10.1109/ROBOT.2001.932591
Fjellstad OE, Fossen T (1994) Position and attitude tracking of auv’s: a quaternion feedback approach. IEEE J Oceanic Eng 19(4): 512–518. doi:10.1109/48.338387
Fjellstad OE, Fossen T (1994) Singularity-free tracking of unmanned underwater vehicles in 6 dof. In: Proceedings of the 33rd IEEE conference on decision and control, 1994, vol 2, pp 1128–1133. doi:10.1109/CDC.1994.411068
Fossen T, Balchen J (1991) The nerov autonomous underwater vehicle. In: Proceedings of the ocean technologies and opportunities in the Pacific for the 90’s, OCEANS ’91, pp 1414–1420
Hanai A, Choi S, Marani G, Rosa K (2009) Experimental validation of model-based thruster fault detection for underwater vehicles. In: IEEE International Conference on Robotics and Automation, ICRA ’09, pp 194–199. doi:10.1109/ROBOT.2009.5152425
Kwatny H, Blankenship G (1995) Symbolic construction of models for multibody dynamics. IEEE Trans Robot Autom 11(2): 271–281. doi:10.1109/70.370509
Marani G (1997) Robosim: a program for simulating mechanical systems in robotics. Master’s thesis, University of Pisa
Marani G (2000) Symbolic computation in system modelling, identification and control. PhD thesis, University of Pisa
Marani G, Choi SK, Yuh J (2009) Underwater autonomous manipulation for intervention missions AUVS. Ocean Eng 36(1):15–23. doi:10.1016/j.oceaneng.2008.08.007, URL: http://www.sciencedirect.com/science/article/B6V4F-4T7F5PD-1/2/ce310fd84710cc86d5ffd871b95edd70, aUV
Sun Y, Cheah C (2003) Adaptive setpoint control for autonomous underwater vehicles. In: Proceedings fo the 42nd IEEE conference on decision and control, vol 2, pp 1262–1267. doi:10.1109/CDC.2003.1272782
Yuh J, Choi SK (1999) Semi-autonomous underwater vehicle for intervention mission: an AUV that does more than just swim. Sea Technol 40(10): 37–42
Yuh J, Choi S, Ikehara C, Kim G, McMurty G, Ghasemi-Nejhad M, Sarkar N, Sugihara K (1998) Design of a semi-autonomous underwater vehicle for intervention missions (sauvim). In: Proceedings of the 1998 International Symposium on Underwater Technology, pp 63–68. doi:10.1109/UT.1998.670059
Yuh J, Nie J, Lee C (1999) Experimental study on adaptive control of underwater robots. In: Proceedings of the IEEE international conference on robotics and automation, vol 1, pp 393–398. doi:10.1109/ROBOT.1999.770010
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Marani, G., Choi, S.K. & Yuh, J. Real-time center of buoyancy identification for optimal hovering in autonomous underwater intervention. Intel Serv Robotics 3, 175–182 (2010). https://doi.org/10.1007/s11370-010-0068-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-010-0068-1