
Abstract
Purpose
A scalable life cycle inventory (LCI) model, which provides mass composition and manufacturing data for a power electronic inverter unit intended for controlling electric vehicle propulsion motors, was developed. The purpose is to fill existing data gaps for life cycle assessment (LCA) of electric vehicles. The model comprises new and easy-to-use data with sufficient level of detail to enable proper component scaling and more in-depth analysis of inverter units. It represents a stand-alone three-phase inverter with insulated gate bipolar transistors (IGBTs), typical in electric vehicles. This article (part I) explains the modeling of the inverter design including the principles for scaling, exemplifies results, and evaluates the models’ mass estimations.
Methods
Data for the design of power electronic inverter units was compiled from material content declarations, textbooks, technology benchmarking literature, experts in industry, and product descriptions. Detailed technical documentation for two electrically and electronically complete inverter units were used as a baseline and were supplemented with data for casings, connectors, and bus bars suitable for automotive applications. Data, theory, and design rules were combined to establish a complete model, which calculates the mass of all subparts from an input of nominal power and DC system voltage. The validity of the mass estimates was evaluated through comparison with data for real automotive inverter units.
Results and discussion
The results of the LCI model exemplifies how the composition of the inverter unit varies within the model range of 20–200 kW and 250–700 V, from small passenger car applications up to distribution trucks or city buses. The models’ mass estimations deviate up to 14% from the specified mass for ten examples of real inverter units. Despite the many challenges of creating a generic model of a vehicle powertrain part, including expected variability in design, all results of the model validation fall within the targeted goal for accuracy.
Conclusions
The LCI model combines different principles for the scaling of subparts into one model that capture important design implications of different power demands and voltage ratings. The model can be used for a generic estimation of the mass and material composition of a power electronic inverter unit controlling electric propulsion motors, for LCA, when specific data is lacking.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
1.1 Background
The environmental burden of automotive electronics and power electronics has been sparsely explored in academic literature (Hawkins et al. 2012), despite there being signs that the use of power electronics make important contributions to the toxicity and resource extraction impacts of vehicles, with leakage to ground water from mine tailings of various metals as a key problem (Andersen et al. 2014; Nordelöf et al. 2014). At the same time, life cycle assessment (LCA) of electric vehicles is an active area of research with frequent publications of case studies (Hawkins et al. 2012; Nordelöf et al. 2014), which is contradictory. There seem to be obstacles hindering in-depth analysis of vehicle power electronics with LCA. Overall, there is a lack of access to detailed component inventory data (Hawkins et al. 2012).
Still, there is life cycle inventory (LCI) data for electric powertrain components available in large databases, for example, in the Ecoinvent database (Del Duce et al. 2016; Wernet et al. 2016). However, in line with common practices for inventory datasets, the reference flow is expressed as “kilogram of component,” as if the set of underlying electrical performance parameters are generally valid for all applications. Consequently, the functional unit fails to reflect the actual function of the electronic component and proper use of such datasets require additional data for basic electrical requirements and how those relate to the mass composition, which can be difficult to obtain. Technical details about power electronic converters are often not provided in open automotive documentation for electric vehicles, whereas other parameters are more easily acquired, such as the peak power rating of the electric motor or the nominal operating voltage of the battery (Volvo Car Corporation 2011; Volkswagen 2014b).
Adjustments of available data using more appropriate parameters can also lead to unrealistic results, if conducted too crudely, for example, re-sizing a complete inverter unit by scaling the mass 1:1 with the rated power capability (Hawkins et al. 2013a, b). One reason is that many subcomponents relate differently to basic electrical requirements. To overcome these challenges, design data is needed with sufficient level of detail to enable proper component scaling and more in-depth analysis of power electronics. It should preferably be generated from parameters easy to find in vehicle or powertrain specifications.
1.2 Purpose and content: the scalable LCI model and the article series
In response to the lack of data for vehicle power electronics, a scalable LCI model was developed. It provides mass composition and manufacturing data for an inverter unit intended for controlling electric vehicle propulsion motors. The purpose of the model is to provide detailed component inventory data for LCA. It generates data on inverters ranging within 20–200 kW in nominal power and within 250–700 V in direct current (DC) system voltage. The model results include a complete gate-to-gate inventory covering the production of the inverter, from materials and ready-made subcomponents to a complete unit. It represents a typical stand-alone three-phase inverter unit with insulated gate bipolar transistors (IGBTs). The model excludes adjacent powertrain components, such as the electric motor, but additional user options allow modifications of the coverage, making it easier to combine results with other data, as if the unit is integrated in another part, e.g., a combined inverter and DC/DC voltage level converter.
The aim of this article, part I, is to describe the technical design of a typical automotive inverter unit, how it has been represented in the LCI model, and the principles for scaling of different subparts. It exemplifies how the model calculates detailed mass composition results for the inverter unit and compares the model results for different input parameters with data for real and state-of-the-art inverter units published between 2013 and 2016, to validate the model. Challenges in the modeling work and the structure, technical scope, and user options of the LCI data model are explained.
An important overall aim when developing the LCI model was to provide a tool which is easy to use for LCA practitioners and to make the design scalable in size from easily acquired engineering parameters. This required not only mass composition data, but also manufacturing data with sufficient resolution to capture the effects of scaling the inverter unit in size, also in production. All manufacturing processes were followed upstream to a point where LCI data for representative material production or subcomponents existed in the Ecoinvent database (Wernet et al. 2016), in order to facilitate the creation of a cradle-to-gate LCI. The inventory model can be downloaded as a Microsoft Excel spreadsheet file.Footnote 1
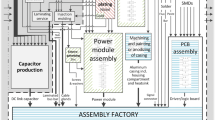
Part II describes the modeling of power electronics manufacturing, including assembly of printed circuit boards (PCBs), machining and surface treatment of die cast casing parts and, foremost, the making of the IGBT power module in several steps. The integration of these datasets is what turns the scalable design model (the focus of part I) into an LCI model. All new production data is explained in part II, and some unit process datasets are exemplified, but the total data compilation is available in the SPINE@CPM LCA Database, including an underlying model report (Nordelöf and Alatalo 2017)1. Also in part II, the selection of system boundaries for manufacturing is explained, including flow charts with different levels of detail, as well as the proposed use of Ecoinvent for upstream flows of materials, subcomponents, and production efforts, in order to fulfill the intended coverage of all production steps. Procedural challenges in data collection are discussed, to report on experiences and describe how they were overcome, as a contribution to the LCA research practice.
The article series was written for a multidisciplinary audience, to address both LCA practitioners novel to power electronics and electrical power engineers aiming to use LCA results. The associated model report compiles relevant background information and power electronics theory for LCA practitioners, explains and motivates all model assumptions, and provides full descriptions of all gathered data, i.e., information that is too extensive for the scope of the article series (Nordelöf and Alatalo 2017)1.
2 Technical overview
2.1 The power electronic inverter unit
The main application of an inverter is to control AC-driven (alternating current-driven) electrical machines. The IGBTs of the power module act as switches and convert DC from the battery to an AC waveform of specific voltage and frequency for the electric motor, which in turn produces torque that can propel a vehicle. An inverter requires several building blocks to become a fully functioning unit (Fig. 1). The power module contains the semiconductor devices, referred to as chips, in the form of a “transistor bridge” with each IGBT mounted in parallel with a power diode. The module provides physical and electrical protection, a conducting pattern (i.e., the circuit design), connectors, and a structure to dissipate heat from each chip (Volke and Hornkamp 2012).

Exploded sketch of the modeled inverter unit design
The inverter unit is connected to the battery via the DC link, also called the DC system or the DC bus. One or a few DC link capacitors are required to stabilize the DC link and protect the battery and the power module, by temporarily absorbing energy, for example, to minimize ripple from the switching operation (Grinberg and Palmer 2005; Volke and Hornkamp 2012; Wen et al. 2012). Additional “snubber” capacitors are sometimes included to provide further protection (Brubaker et al. 2012; Volke and Hornkamp 2012). However, improved switching control and careful circuit design can eliminate the need for extra capacitors (Brubaker et al. 2012; Volke and Hornkamp 2012), preferred to avoid additional cost, weight, and volume.
The inverter unit also includes low voltage PCBs. The gate drivers on the driver board control the IGBTs by regulating their supply voltage (Volke and Hornkamp 2012). In turn, additional logic circuitry on the board and on the logic board use powertrain command inputs and signals from various sensors to control the gate driver stage. Accordingly, the PCBs have several interfaces for signals and especially one larger signal connector for external communication.
Furthermore, the electronic subparts must be integrated electrically and mechanically. A bus bar is a solid metallic conductor interconnecting the contacts (also called terminals) of other subcomponents, instead of internal cables. The laminated bus bar is a unified structure for power distribution between the power module, DC link capacitor, and the glands, a common solution for connecting external power cables. All subparts are packed and secured in the housing compartment of the casing. A lid covers the top and at the bottom is a heat sink designed to cool off heat, mainly from the power stage (the power module and the DC link capacitor, grouped).
There are many terms used interchangeably when referring to casings in the literature about electronics. However, for the terminology of the LCI model, it was decided that the housing compartment and the heatsink are two different, but integrated, subsections of the casing. There are two design options for the heatsink: liquid cooling through channels or air cooling with fins.
2.2 Design variability and application areas
Today, the IGBT is the dominating power transistor type in automotive inverter unit applications, especially when power ratings are higher than 20 kW (Emadi 2005; Husain 2011; Guerra 2011; Volke and Hornkamp 2012; Hughes and Drury 2013; Krah et al. 2013; Albanna et al. 2016). Other transistor technologies are subject to faster progress in terms of power module design (Guerra 2011; Davis 2009; Sarlioglu et al. 2015), whereas the IGBT power modules often align to a standard concept, which has remained much the same since the 1990s (Tan et al. 2010; Volke and Hornkamp 2012).
In complete inverter units, variability in design largely relates to the level of integration with other parts, packing space, and the need for cooling. Stand-alone units typically include the standard set of subcomponents described in Section 2.1, and the main source of variability is the design of the casing as regards both the compartment geometry and the heatsink (Volke and Hornkamp 2012; Burress and Campbell 2013). Connectors and the laminated bus bar size also vary with the geometry of the unit and according to electrical requirements.
Progress in casing design has been a key factor for improved power density (i.e., rated kilowatts per liter) of inverter units for a number of years (Burress et al. 2011; Kang 2012; Sarlioglu et al. 2015). For example, the inverter mass is about the same in the 2007 Toyota Camry as in the 2008 Lexus LS600H, but the latter handles 40 kW higher power (Burress et al. 2011; Sarlioglu et al. 2015). Recalculated, the specific power (i.e., rated kilowatts per kilogram) is 35% lower for the Camry.
The operating parameters of the inverter unit are dependent on the other powertrain parts, without clearly defined rules for sizing (Nordelöf and Alatalo 2017). Nevertheless, in general, it is practical for rated nominal power (the highest measured continuous working point) of the inverter unit to subsist the peak power of the electric motor (also referred to as maximum power, i.e., a temporary thermal overload of the motor) (Nordelöf and Alatalo 2017). Such matching of power capability between the inverter unit and the electric motor has been confirmed in vehicle benchmarking literature (Burress et al. 2011; Burress and Campbell 2013; Sarlioglu et al. 2015).
As a note on model applicability, full electric passenger cars are often specified with a nominal DC system voltage within 250–450 V and a rated peak power of the electric motor within 30–120 kW (Grunditz and Thiringer 2016). However, high-performance sports cars can have considerably higher power capability. Hybrid electric vehicles, i.e., those combining a combustion engine and electric propulsion, require less electrical power, up to about 50 kW in peak motor ratings (Çaǧatay Bayindir et al. 2011; Volvo Car Corporation 2013). City buses and distribution trucks operate at 600–700 V and with peak powers of 120 kW and above, for hybrid and all electric versions, depending on the vehicle size (Inunza Soriano and Laudon 2012; Volvo Bussar 2016; Volvo Bus Corporation 2015).
3 Methods
3.1 Working procedure, model structure, and targeted estimation accuracy
Researchers from the disciplines of LCA methodology and power electronics collaborated to build the LCI model. Design data was gathered from material content declarations, textbooks, technology benchmarking literature, experts in industry, and product descriptions. Particularly, the core data was gathered from Infineon Technologies AG (2012a, 2014), representing a typical overall circuit arrangement with specific data available for key components. Figure 2 illustrates that this data was combined into a scalable design model as an intermediate output and then merged with well-adapted production data (part II) to form the scalable LCI model.

The construction of inverter units comprises trade-offs between conflicting goals (Burress and Campbell 2013), for example, compact size and low mass versus heat resistance and robustness. In addition, alternative engineering solutions can fulfill similar requirements, exemplified in particular by the casing and the laminated bus bar, which have large design variability. Analogous to electrical machines, these diverging design characteristics pose a challenge when the aim is to create an easy-to-use and scalable design model for LCA (Nordelöf et al. 2018).
However, the power stage can be based on the standard concept for power modules (Volke and Hornkamp 2012), and plastic film type condensers are now the primary choice for DC link capacitance (Grinberg and Palmer 2005; Salcone and Bond 2009; Wen et al. 2012; AVX 2015). The initiating idea of this project was that if such typical main power stage components serve as a foundation, it should be possible to establish a design model for an inverter unit that is both satisfactorily generic and relevant for LCA purposes.
The precision of such a model will depend on inherent variability traits, and the accuracy target for the mass estimation of the model was set to be ± 25%, based on engineering judgment. All comparisons with real-world units falling within this range were regarded as a satisfactory result.
3.2 Model flexibility and the easy-to-use interface
The user interacts with the LCI model via a pop-up window. He or she is requested to enter values for the two model parameters: the nominal power of the inverter unit and the DC system voltage. In response, the model calculates the complete and scaled manufacturing gate-to-gate inventory (part II), the material composition (presented in a list), the component composition (presented graphically), and the total mass. The default setting for the representation of the heatsink is liquid cooling, but if the input power value is within 20–50 kW, it is possible to select air cooling.
The LCI model also offers flexibility for the user as to whether or not to exclude two subparts (both or each separately) with significant contributions to the total mass: the aluminum casing and the laminated bus bar. These options make it easier for the user to model the inverter as an integrated part of a larger power electronic unit, or to increase the precision of the mass estimation if data is gathered separately for some specific geometry or cooling design. If the casing is excluded, the high voltage connectors (the cable glands) and a share of the fasteners are also excluded, since they are modeled as mounted into the casing. Alternatively, the user can choose to enter a substitute value for the mass of the casing directly into the model calculations. The glands and fasteners then remain in the output model results.
Commonly, inverter units are specified with a voltage operating span (Bosch 2008; Siemens 2015b; Brusa 2013a, b; Siemens 2014; Inmotion 2016) and rated values for their ability to handle currents (Bosch 2008; Siemens 2015b; Brusa 2013a, b; Siemens 2014; Inmotion 2016). Less often, values are stated for the rated nominal power in inverter specifications (Brusa 2013a, b; Siemens 2014). However, an important aim was to make the model build on parameters that are both easy to access and relevant for the scaling of the design. Accordingly (in line with Section 2.2), the model user is recommended to use the rated peak power of the electrical machine (instead of the nominal power of the inverter unit) and the nominal operating voltage of the battery (or a DC system voltage stated for the powertrain), if data for a specific inverter unit is lacking.
3.3 Baseline units, reference units, and the choice of parameters for scaling
The main data source for the overall arrangement and circuit design of the modeled inverter is detailed technical documentation about two inverter units from Infineon (2012a, 2014). Both units provide complete electric and electronic functionality, but lack casings, connectors, and bus bars suitable for automotive use. They constitute evaluation kits for the HybridPACK™ IGBT power modules and can be used for test and evaluation by vehicle makers during their development work (Infineon 2012a, b, c, 2014). The HybridPACK™ three-phase IGBT power modules are used by several established auto-manufacturers, e.g., BMW, Kia, and Hyundai (Green Car Congress 2011; Ozpineci 2016). The two Infineon inverters are hereinafter referred to as the baseline units, since they were taken as the starting point for further work and supplementary data collection to establish two (one small and one large) complete reference units for the model scale factors. Figure 3 shows a schematic drawing of the structure common to both baseline units and consequently inherited by the reference units.

Schematic overview of the baseline inverter units (dotted box), including the main electronic sub-components (dashed boxes), and how the circuitry connects to the battery and electric motor. Adapted from Husain (2011)
The evaluation kit documentation specified the properties of the power stage components and the amount of low voltage electronics necessary to construct functioning units. Additional detailed data was gathered for the material content of the power modules and the DC link capacitors, by requests made to Epcos AG (2011) and to Infineon (2008, 2009)—and confirmed as valid by Heinicke (2014). The principal design was judged to be satisfactorily generic for the model purpose, based on observations in benchmarking literature and textbooks (Sheng and Colino 2005; Burress et al. 2011; Volke and Hornkamp 2012; Miller 2013b; Ozpineci 2014; Mitsubishi 2014; Fuji Electric 2015), and the data sufficient as a basis for rescaling the unit within 20–200 kW and 250–700 V, based on the authors’ engineering judgment and expertise.
There is an overall correlation between the mass and volume, and the power capability of inverter units (Fuji Electric 2015; 2016; Infineon 2012a, 2014). For this reason, power was selected as a main scaling parameter. However, various subparts relate in different ways to increasing power demand. Geometrical dimensions have to be larger in order to handle higher currents, for example, in conductors, or because surrounding parts are expanding. Other subcomponents can remain essentially unchanged and accomplish the same functionality. As a main strategy, detailed reference data was gathered to allow linear scaling of mass with increasing power demand per material constituent of included subparts, i.e., each material is scaled with individual coefficients—large if the increase in size is steep and small if it is little. This main strategy was applied to the power module, the aluminum casing, cable glands, and fasteners. However, for the DC link capacitor and the laminated bus bar, simplified scaling models were established from basic component and circuit theory, achieved by introducing the nominal voltage as a complementary parameter besides power (Nordelöf and Alatalo 2017). Also important was the combined availability of rated electrical data, geometrical data, and mass composition data for the baseline units, which made it possible to complete the model with nominal power and voltage as the input parameters.
Moreover, the nominal power capability of an inverter unit, i.e., during continuous operation, is closely related to its ability to dissipate heat. For example, the highest tolerable current for a power module can only be specified in relation to the chip temperature and the cooling effect. The thermal requirements for the power module were used to model the air-cooled heatsink, and the test kit cooling design proposals were used for the liquid-cooled heatsink (Infineon 2011, 2012a, 2014), albeit in estimate calculations and not detailed modeling. Moreover, electrical and geometrical data, theory, and standard parts catalogs were combined to establish two complete reference units (including casings, power cable connectors, and bus bar structures). Table 1 summarizes selected properties of the two units, including data adjustments and details explained in Section 4.
4 Design and representation of inverter subparts
4.1 The IGBT power module
The semiconductor chips are the key to the design of the power module, but they only account for about 0.2% of the weight (Nordelöf and Alatalo 2017). The chips are attached with solder onto a patterned foil of copper conductors, in turn bonded to a thin insulating ceramic substrate with high thermal conductivity—250 μm to 1 mm thick (KCC 2012). Copper or aluminum bond wires connect the upper side of the chips further on in the circuit, between conductors and often also to the contacts of the terminals (unless they are attached directly to the circuit pattern). The substrate is typically made of aluminum oxide or aluminum nitride (KCC 2012; Volke and Hornkamp 2012). Another copper foil is directly bonded to the opposite side of the substrate. This three-layer sandwich design (copper-ceramic-copper) is often referred to as a DCB (direct copper bonded substrate) (Volke and Hornkamp 2012). The underside of the DCB is soldered to a 3–8-mm-thick copper baseplate, which transfers heat from the power module via a layer of thermal grease to the heatsink. A plastic frame is fastened on the upper side of the baseplate, around the DCB, with copper contacts (leading to the power terminals) and pin terminals (connected to the driver board) anchored into the plastic structure (Sheng and Colino 2005). Silicone gel is potted over the chips and conductors as a contamination barrier, and a glued plastic lid covers the top. Most copper surfaces are nickel plated for additional protection and thinner plug or pin terminals can have gold on top to reduce electrical resistance (Infineon 2010b; Volke and Hornkamp 2012). The power terminals are made of galvanized steel for screw connections to external bus bars.
This base concept was identified in the detailed material lists of the two baseline power modules (Infineon 2008, 2009), with some small variations between the modules. Both have similar chips, alumina DCBs, baseplates, frames, and potting gel. But the small module has contacts and terminals made of brass and wires made of aluminum, whereas the large module uses pure copper due to higher current requirements (Volke and Hornkamp 2012). The data for these subparts was reworked and harmonized as copper to enable use of the reference modules for scaling per material constituent with increasing power requirement. The copper mass was subdivided into fractions allotted to different subparts based on geometric estimates. The solder ingredients were grouped into one compound of lead-free solder. The mix was identified to consist of 95.5% tin, 3.8% silver, and 0.7% copper, which is close to the composition modeled for lead-free solder in Ecoinvent (Sn95.5Ag3.9Cu0.6) (Wernet et al. 2016), recommended for the upstream representation of data.
The final and harmonized mass of the reference power modules, used for the calculation of the scale factors, was calculated to be 500 g (small unit) and 1.26 kg (large unit) (Nordelöf and Alatalo 2017).
4.2 The DC link capacitor
The functionality of the DC link capacitor depends on material properties, size, and geometry. Plastic film technology is the preferred option today (Grinberg and Palmer 2005; Montanari et al. 2008; Brubaker et al. 2012). Such capacitors are designed as wound or stacked layers of dielectric plastic film and metal electrodes (Vishay 2012; Epcos 2013; Cornell Dubilier 2016). The electrode is either a foil or a metallized layer deposited directly on the film, consisting of aluminum, zinc, or tin (Stahler 2013; Cornell Dubilier 2016). For automotive applications, it is common to pack metallized films, or a hybrid of the two electrode types, into brick-shaped casings to enable further high-density packing of the inverter unit (Montanari et al. 2008; AVX 2015).
Capacitors with comparable electrical properties do not always have identical mechanical and thermal properties. Proper heat dissipation is important, especially if the capacitor is made small and compact. Related to this, it was observed that capacitors generally are larger, heavier, and feature higher capacitance for inverter units with increasing power demand, but also that the size and mass depend on the DC voltage rating (Nordelöf and Alatalo 2017). In addition, although the relationship between size and different operating requirements is complex, all inspected automotive DC link capacitors were found to have comparable volumetric densities (ibid.). Thus, as a first-order approximation, it is reasonable to assume that they have similar average mass compositions.
For the LCI model, the modeling of the DC link capacitor was based on data for such brick-shaped plastic film capacitors, with hybrid electrodes of mainly zinc and tin. For the scaling of the design, capacitance recommendations stated in literature (Grinberg and Palmer 2005; Salcone and Bond 2009; Wen et al. 2012) were combined with basic theory of capacitors to establish how the total capacitor mass scales with the quotient of power over voltage (Nordelöf and Alatalo 2017). A scale factor was calculated from four capacitors with equal voltage rating of 450 V and a mass to power ratio within 15–17.5 g/kW (Infineon 2012b; Epcos 2014; Infineon 2014). The scaling equation was developed assuming a specific internal structure of the capacitor, where the proportion of dielectric film and electrodes remains constant. This simplification was judged representative for the entire model span, both in power and voltage, i.e., capacitance grows with the electrode surface area, and the material composition was modeled as fixed (Nordelöf and Alatalo 2017). The composition used was based on the data collected from Epcos (2011).
4.3 Printed circuit boards for logic and driver functionality
The two PCBs contain a number of circuit blocks to realize their functionality, e.g., driver circuits, power supply, microcontrollers, signal interfaces, and filters. Surface-mount devices (SMDs) are used, such as integrated circuits, transistors, capacitors, resistors, and other electronic board components. Board connectors are used to interconnect the two PCBs, and to connect the driver board to the power module.
Detailed design data for driver and logic boards were included in Infineon’s (2012a, 2014) documentation for the baseline inverter units. The PCBs were identified as standard six-layered (FR-4 type, flame retardant) boards with almost identical sub-circuit block structure between the boards in each baseline unit. More specifically, no evidence was found of an increasing board area, SMD size, or number of SMDs, with higher rated power capability. It was expected that key transistors and capacitors in the driver circuits would grow in mass along with an increased size of the power module, but this effect was found to be small and was neglected. Both baseline driver boards were calculated to be 1.5 dm2 while the logic board of the small baseline inverter unit was found to be larger (0.9 dm2) than that of the large unit (0.7 dm2). Therefore, to keep the model simple, both PCBs were modeled with the same size and the same number of SMDs over the entire model range. The board geometries of the large units were used and all SMDs on both board types were counted (Infineon 2014). Next, the SMDs were categorized into component types (to match with upstream Ecoinvent data) and each mass was decided from the package code, i.e., a standardized definition of the size (Topline 2016).
The modeled type of PCB panel weighs 32.6 g/dm2 (Hischier et al. 2007) and consists of roughly 40% glass fiber, 40% epoxy resin, and 20% copper foil (Nan Ya Plastics 2008). The total mass of SMDs was calculated to 65 g (316 devices on the driver board) and 28 g (457 devices on the logic board). Twenty percent of the board area was modeled as pads where lead-free solder (Sn95.5Ag3.9Cu0.6) connects the components (Edgren 2015). The average amount of solder applied was calculated from PCB assembly data to be 75 g/m2 (Nordelöf and Alatalo 2017). Both boards have coating of polyurethane lacquer on both sides.
4.4 The casing and different cooling options for the heatsink
Casings were not included in the data from Infineon (2012a, 2014). Instead, observations in benchmarking literature, expert opinions, material data, and catalog part descriptions of enclosures and heatsinks for electronics were combined to establish four complete reference units for the casing—two for each cooling option—and subsequently, material scale factors (Burress et al. 2009; Burress et al. 2011; Burress and Campbell 2013; Miller 2013a; Austerlitz 2014; Johansson 2015; Rose 2016). All reference casings were modeled to be made of cast aluminum with a compartment geometry that allows packing of all other subparts with sufficient margins (Rose 2016). The heatsink constitutes the bottom of the housing compartment and the power stage components are screw mounted over a thin layer of thermal interface material consisting of aluminum oxide (70%), zinc oxide (15%), and silicone oil (15%) (Volke and Hornkamp 2012; Electrolube 2013).
For the air-cooled heatsink, estimate calculations for heat transfer were made in compliance with the geometrical and thermal requirements of the baseline units (Infineon 2011, 2012a, 2014). A standard model heatsink from Austerlitz (2014), i.e., a ready-made design with well-documented cooling performance, was adopted to continuously cool off the 2.5% of power lost as heat. The air cooling is accomplished using fins, providing a large surface area for heat exchange to take place (Volke and Hornkamp 2012; Austerlitz 2014), and if air cooling is selected, the model presumes there to be an external fan operating to cool the fins (not included in the model). Even so, it was found that scaling above 50 kW made the required heatsink unrealistic in size compared to the housing compartment. This is the reason that the model of the air-cooled option is limited in range to 20–50 kW, with support from observations in benchmarking literature that air cooling is uncommon for applications demanding higher power (Burress et al. 2009, 2011; Burress and Campbell 2013).
For the liquid-cooled heatsink, the recommended cooling designs of the baseline units were taken as a starting point (Infineon 2010b, 2012a, 2014) and scaled in size with increasing power over the entire model span, linked through the geometry of the housing compartment. The Infineon drawings were complemented with information about the Nissan Leaf cooling circuit (Burress and Campbell 2013) to model the size of the cooling channels leading from the inlets and to the outlets of the cooling circuit.
Furthermore, it was observed that standard aluminum enclosures are often painted (Rose 2016), whereas anodizing (a technique to create a protective layer of aluminum oxide) is the default coating option for many air-cooled heatsinks (Austerlitz 2014). Consequently, the casing is modeled with different coatings depending on the choice of cooling method. A clear varnish for automotive housing applications was selected for the paint of the liquid cooling option (ExxonMobil 2007; Von Roll 2013).
4.5 The laminated bus bar
Copper and aluminum, or their alloys, are typical conductor materials. Expectedly, they are used in bus bars (Mersen 2013). The feature that defines laminated bus bars is the thin foils of polymer insulation between the conductors, which allows them to be structured in layers only a fraction of a millimeter apart (Stigben 2004; Mersen 2013; Storm 2016). In addition, the conductors are often plated with tin or nickel (Mersen 2013).
According to Mersen (2013), there is a design rule of thumb for the cross section of the conductors, imposing a maximum allowed current of 5 A/mm2 and a 5% additional increase in area for every adjacent layer. This design rule was used and combined with both DC and AC circuit theories, and lengthwise scaling of the conductors based on the geometry of the reference units, to estimate the total bus bar mass from the input of nominal power and DC voltage. It is a relatively modest current requirement, for example, in comparison to electric motor windings (Nordelöf et al. 2017). As a result, the model provides a mass prediction for a laminated bus bar with a safe margin to be thermally overloaded temporarily and return to steady-state operation without being damaged or degraded. Data was gathered from Carbex (2015) for an insulating polyester foil with a mass of 487 g/m2, placed in double layers between the conductors.
4.6 Electrical connectors for signals and power cables
Cable glands are typically made of brass, stainless steel, aluminum, or polyamide plastics (CMP 2015; Eaton 2015; Ouneva 2015; Fibox 2016). Automotive brass glands are often nickel plated, and inserts, seals, and o-rings are made of nylon and thermoset elastomers, e.g., heat-resistant rubber-like materials such as neoprene or silicone (Lapp 2012; Thomas and Betts 2005; CMP 2015; Eaton 2015; Fibox 2016). The glands are screw mounted into the casing wall and stripped power cables are secured inside the gland body. Data from standard parts catalogs were combined with geometric approximations to establish two reference glands and scaling factors for all materials and the total area for nickel plating.
Furthermore, the external communication connector on the reference logic board was remodeled to better represent a real in-vehicle application compared to the baseline (Infineon 2014). It was replaced with a larger, panel mount, 50-pinned connector, mounted with lead-free solder in through-holes to the logic board. Data was gathered from Tyco (2010) and TE Connectivity (2017), resulting in an estimation of 49 g containing molded plastics, brass pin conductors, and gold-plated contacts. Based on similarities in the material composition, it was modeled as a ready-made subcomponent by referring to data in Ecoinvent (peripheral component interconnect).
4.7 Parts required for assembly
The assembly of the inverter into one functioning unit requires fasteners, typically screws secured in threaded holes of the aluminum casing, laminated bus bar, and the terminals of the power module and the DC link capacitor. The PCBs also require screws and nylon clearance spacers in order to mount them on top of each other and onto the power module. The recommended type and required number of fasteners were read out of the specifications provided for baseline units (Infineon 2010a, b, 2012a, 2014) and the standard enclosure documentation for the casing (Rose 2016). Data for galvanized low alloy carbon steel screws and spring washers was gathered from Fuller (2013). The zinc content of each part was estimated to 2%, based on a typical 15 μm coating layer for screws and terminals of the intended type (Walraven 2011). For the heatsink with liquid cooling, it was assumed that the cooling channel arrangement makes it necessary to die cast the heatsink in two parts that must be firmly mounted together, and specific screws were accounted for.
5 Results and evaluation
One outcome of the LCI model is a complete manufacturing inventory data list (described in part II). However, the model also generates total mass, material, and component composition results for the inverter unit. Three different combinations of nominal power, DC voltage, and cooling options are exemplified in Fig. 4, as an excerpt from a broader investigation of results in which different input parameters were combined. Notably, the weight proportion of different subparts differs significantly. The aluminum casing represents a majority of the mass for most parameter settings, often within 50–75% of the mass (but with 39 and 79% as end values). The heatsink design, air or liquid cooling, is an important factor for the mass variation. The mass share of the DC link capacitor also varies significantly (3–27% overall) as well as the share of the laminated bus bar (1–13% overall). In absolute numbers, the power module and DC link capacitor masses fall within 0.5–2.8 and 0.2–5.7 kg, respectively.

Examples of LCI model total mass and component composition results for different combinations of nominal power, voltage, and cooling method
Figure 5 shows the total mass over the model range for nominal power of the inverter unit with different curves for a few selected DC voltage levels. The mass grows linearly with power, but the gradient depends on the voltage. The reason is that both the DC link capacitor and the laminated bus bar can be designed with lower mass with increased voltage. To validate the model, the mass estimations were compared with detailed data for real inverter units, published between 2013 and 2016, also shown in Fig. 5 and with more details in Table 2. Ten units with data available for power, voltage, and total mass were found and used.

LCI model results for total inverter unit mass for power and selected voltages over the model range. Crosses refer to data for real electric vehicle inverter units (1–10). The DC system voltage for each plotted inverter unit is stated in the legend (for more details, see Table 2)
The real-world data deviates from − 12 to + 14% from the model estimates of total mass, i.e., within the expectations for model accuracy. For all Brusa units, the original data specifies a voltage operating span and a value for the lowest voltage where the inverter unit can provide full current output (Brusa 2013a, b). In the case of the DMC5X7-series (Brusa 2013b) (units 2, 5, 8, and 10), the latter value was specified to 400 V and was used as the input of nominal DC voltage to the LCI model. Overall, the model’s mass estimates are relatively close to the real masses of the DMC5X7-series, with a difference ranging from − 3 to + 6%. For the other set of Brusa units, the DMC5X4-series (Brusa 2013a) (units 1, 4, 7, and 9), the deviation is larger, ranging within + 11–14%. For this series, the voltage operating span reaches up to 450 V, well within the model range, but the lowest voltage where the inverter units can provide full current output are specified to 200 V, i.e., outside the model range. For this reason, the lowest value in the model range was used, i.e., 250 V, to calculate the model’s mass estimate. Notably, the masses of the units are identical in pairs between the two Brusa series (Brusa 2013a, b). The data sheets indicate that both product series stem from the same original design, likely with modifications that are important for cost and performance but with very little impact on the total mass (i.e., no mass difference reported). The use of different chips with very few other design changes is one such example. This illustrates a challenge for any generic model of a vehicle powertrain part where the aim is to combine easily accessed input data with a readily used calculation procedure—existing designs are reused and modified, and parts cannot be expected to be optimally designed from scratch for one set of conditions. Costs for development work, tools for manufacturing, and varying scales of production are parameters outside the scope of the LCI model, which also influence the design.
For the comparison with the inverter from Siemens (unit 3), the mass estimation of the model was generated using the rated values for an integrated drive (Siemens 2015a), i.e., the inverter unit in combination with an electrical machine. In such a case, the rated peak power of the drive refers to the electric motor, and in line with the recommendations for the model, this value was used as the input of power to the model, since a specific value for the rated nominal power (of the inverter unit) was lacking. The nominal DC system voltage was included in the specification. The LCI model underestimates the mass of the unit (− 12%) even though it is claimed that this design has particularly high power density (Siemens 2015a). The integrated drive is described as a modularized and scalable concept including both power electronics and an electrical machine without specific details for its realization. It states that the inverter unit can be used for higher power applications, but the combination of data for voltages, currents, and power indicate that this statement refers to the peak power capability of the inverter unit (Siemens 2015a, b). Nevertheless, in this case, the main explanation for the deviation between the estimated and real mass is the lack of a specific nominal power rating since the unit presumably has a higher power capability than the motor with which it has been combined.
Finally, for the Volkswagen E-Golf (unit 6), data was available in a way common to powertrain specifications, i.e., it included the rated peak power of the electric motor and the nominal rating of the battery (i.e., the provided DC system voltage). Fewer details were presented about the inverter unit, but fortunately the mass was available for comparison for the LCI model evaluation. The data for the motor and the battery was used, and the result was − 1% deviation.
6 Discussion and conclusions
A new scalable LCI model which estimates the mass and material composition of a power electronic inverter unit suitable for controlling electric vehicle propulsion motors has been presented. This article, part I of two, has shown how the model relies on detailed design data collection and that it combines a simplified linear scaling of the mass per material constituent with the nominal power for the majority of subparts, with relevant theory, engineering judgment, and design rule of thumbs for two other key subparts, into one complete model that also captures the effects of different voltage ratings.
In terms of temporal and technical validity, the model represents a current typical design for automotive inverter applications. Presumably, the model will remain relevant a number of years ahead, as long as IGBTs and plastic film capacitors are the preferred choice for the power stage. While other transistor technologies are developing fast in terms of performance improvements, silicon-based IGBTs have matured to become an enabling technology for the electrification of vehicles, largely based on improvements in production leading to decreased component cost and high reliability (Guerra 2011; Sarlioglu et al. 2015).
At the same time, designing of inverter units offers large variability in terms of packaging and cooling (Burress and Campbell 2013). For the LCI model, the results presented in Section 5 illustrate this inherent uncertainty especially for the casing and the laminated bus bar, which both give significant contributions to the total mass of the unit. This variability is an important explanation for the difference between the mass predictions generated by the model and the data for real-world inverter units. Another example is the two cooling options of the model—air cooling and liquid cooling—which produce clearly diverging results in the model output for the inverter unit composition.
As a solution offered to the model user, the casing and the laminated bus bar can be excluded from the calculations to increase model accuracy if the aim is to estimate the mass of an inverter unit where data for the casing mass has been gathered separately, or to support modeling when the inverter unit is integrated with other powertrain parts, such that the casing and laminated bus bar must be completely remodeled.
Still, it should be made clear that the simplifications made in the modeling of the main electrical parts also cause some uncertainty in the scaled model results. Particularly, the scaling equation for the DC link capacitor has been simplified from a very complex set of engineering parameters. One possible improvement of the model, if new data becomes available, would be to evaluate the size and mass of brick-shaped automotive DC link capacitors for inverter units with different power requirements at each end of the model’s voltage interval and thereby provide a broader basis for proper scaling of the capacitor size.
For input parameters, the model requests the nominal component ratings for power and DC voltage, but if such data is not available, it works equally well using the peak power rating of the electric motor and the nominal rating of the battery, or the lowest voltage level for which inverter unit can provide full current output. The comparison with data for real-world inverter units showed that the LCI model generates mass data deviating up to 14% from the specified masses for ten units with published records available. Thus, it can be concluded that the total mass results fall well within ± 25% of that of the real units compared, in line with the project target. Hence, for LCA of automotive power electronic inverter units for traction applications, the LCI model can be used as a generic estimation of the mass configuration when specific data is lacking.
7 Accessing the LCI model file and model report
The life cycle inventory model file (Nordelöf 2017) and the model report (Nordelöf and Alatalo 2017) can be downloaded from the SPINE database provided by Swedish Life Cycle Center: http://cpmdatabase.cpm.chalmers.se/Scripts/sheet.asp?ActId=JT-2017-06-26-43.
Notes
Available from the SPINE@CPM LCA Database provided by the Swedish Life Cycle Center at: http://cpmdatabase.cpm.chalmers.se/Scripts/sheet.asp?ActId=JT-2017-06-26-43
References
Albanna A, Malburg A, Anwar M, Guta A, Tiwari N (2016) Performance comparison and device analysis between Si IGBT and SiC MOSFET. In: 2016 IEEE Transportation Electrification Conference and Expo (ITEC), 27-29 June 2016. pp 1–6. https://doi.org/10.1109/ITEC.2016.7520242
Andersen O, Hille J, Gilpin G, Andrae ASG (2014) Life cycle assessment of electronics. In: 2014 IEEE Conference on Technologies for Sustainability (SusTech), 24–26 July 2014. pp 22–29. https://doi.org/10.1109/SusTech.2014.7046212
Austerlitz (2014) The next generation of cooling equipment. Austelitz Electronic GmbH, Nürnberg, Germany (Product catalogue for air-cooled heatsinks)
AVX (2015) Medium power film capacitors for power applications. AVX Corporation, Fountain Inn, South Carolina, USA (Product catalog, S-CPEM0M1215-C)
Bosch (2008) LE—power electronics. Robert Bosch GmbH, Germany (Technical specification/datasheet for inverter unit. Datasheet no 292000P03Z-C/SMC2–200809-En)
Brubaker MA, Kirbie HC, Hosking TA (2012) Integrated DC link capacitor/bus structures to minimize external ESL contribution to voltage overshoot. In: 2012 IEEE Transportation Electrification Conference and Expo (ITEC), 18-20 June 2012. pp 1–6. https://doi.org/10.1109/ITEC.2012.6243453
Brusa (2013a) DMC5—high power inverter. BRUSA Elektronik AG, Switzerland (Inverter unit specifications for DMC5x4 series)
Brusa (2013b) DMC5x7—high power 750 V inverter. BRUSA Elektronik AG, Switzerland (Inverter unit specifications for DMC5x7 series)
Burress T, Campbell S (2013) Benchmarking EV and HEV power electronics and electric machines. Paper presented at the Transportation Electrification Conference and Expo (ITEC), IEEE Detroit, MI, USA, 16–19 June 2013
Burress TA, Coomer CL, Campbell SL, Wereszczak AA, Cunningham JP, Marlino LD, Seiber LE, Lin HT (2009) Evaluation of the 2008 lexus LS 600H hybrid synergy drive system. Olszewski M. Janaury, 2009. Electrical and Electronics Systems Research Division, Oak Ridge National Laboratory, US Department of Energy, USA
Burress TA, Campbell SL, Coomer CL, Ayers CW, Wereszczak AA, Cunningham JP, Marlino LD, Seiber LE, Lin HT (2011) Evaluation of the 2010 toyota prius hybrid synergy drive system. Olszewski M. March, 2011. Electrical and Electronics Systems Research Division, Oak Ridge National Laboratory, US Department of Energy, USA
Çaǧatay Bayindir K, Gözüküçük MA, Teke A (2011) A comprehensive overview of hybrid electric vehicle: powertrain configurations, powertrain control techniques and electronic control units. Energy Convers Manag 52(2):1305–1313
Carbex (2015) Carbex inside—Produktinformation: polyesterfilm MYLAR A. Carbex AB, Sweden (Product datasheet from local supplier)
CMP (2015) CMP cable glands & accessories. CMP Products, Newcastle, United Kingdom (Product catalog, document no. TPC 200 - ISSUE1–08/15)
Cornell Dubilier (2016) Power film capacitor application guide. CDE Cornell Dubilier. http://www.cde.com/resources/catalogs/filmAPPguide.pdf. Accessed 14 Sept 2016
Davis S (2009) SiC and GaN vie for slice of the electric vehicle pie. 35(11):39–40
Del Duce A, Gauch M, Althaus H-J (2016) Electric passenger car transport and passenger car life cycle inventories in ecoinvent version 3. Int J Life Cycle Assess 21:1314–1326
Eaton (2015) The safety you rely on. Introducing Crouse-Hinds by Eaton. Eaton Corporation, Cleveland, Ohio, United States (Product catalog – “Cable Glands Global Solutions Catalog”)
Edgren PJ (2015) Manufacturing process manager at Aros Electronics AB, Mölndal, Sweden. Personal communication during site visit with Nordelöf A, 13 May 2015
Electrolube (2013) Safety data sheet—silicone heat transfer compound plus. HK Wentworth Ltd., Leicestershire, United Kingdom (MSDS for a thermally conductive non-curing heat transfer paste)
Emadi A (ed) (2005) Handbook of automotive power electronics and motor drives, First edn. CRC Press, Taylor & Francis Group, USA
Epcos (2011) Material content data sheet: TDK-EPC—PCC LP capacitor B25655J4507K. vol Version 1. Epcos AG, TDK Group, Heidenheim, Germany (Full declaration of all materials present in the product above a threshold of 0.1% b.w)
Epcos (2013) EPCOS product brief 2014: film capacitors—PCC power capacitor chip for 650-VR semiconductor modules in e-mobility applications. Epcos AG, TDK Group, Munich, Germany (Product brief)
Epcos (2014) Film capacitors—power electronic capacitors: PCC series for Fuji Modules M651/M652 500 μF. Epcos AG, TDK Group, Munich, Germany (Product technical information, order no B25655P4507K**2)
ExxonMobil (2007) Material safety data sheet: aromatic 100 fluid. Exxon Mobil Corporation, United States of America (Product MSDS)
Fibox (2016) Cable glands and cable entries. Fibox Oy Ab. www.fibox.com. Accessed 2 Dec 2016
Fuji Electric (2015) Fuji IGBT modules application manual. Fuji Electric Co., Ltd., Japan. (Application note, REH984c)
Fuju Electric (2016) Fuji electric IGBT modules for automotive applications. Fuji Electric Corporation of America, Fuji Electric Co., Ltd. http://americas.fujielectric.com/files/prod_selector_v/Fuji%20IGBT%20Module%20for%20EV%20HEV.pdf. Accessed 2016–09-16
Fuller (2013) Fuller Metric Parts Ltd.—quality products and services since 1976. Fuller Metric Parts Ltd., Canada (Product catalogue)
Green Car Congress (2011) Hyundai and Kia select Infineon HybridPACK 1 power module for current hybrid vehicle generations BioAge Group, LLC. http://altenergyautos.blogspot.se/2011/10/hyundai-and-kia-select-infineon.html. Accessed Apr 11 2017
Grinberg R, Palmer PR (2005) Advanced DC link capacitor technology application for a stiff voltage-source inverter. In: Vehicle power and propulsion, 2005 IEEE Conference, 7–9 September 2005. 6 pp. https://doi.org/10.1109/vppc.2005.1554557
Grunditz EA, Thiringer T (2016) Performance analysis of current BEVs—based on a comprehensive review of specifications. IEEE Trans Transp Electr 2:270–289. https://doi.org/10.1109/TTE.2016.2571783
Guerra A (2011) Inverter/modules AID energy, appliance, PV and motor sectors. Power Electron Technol 37(4)
Hawkins T, Gausen O, Strømman A (2012) Environmental impacts of hybrid and electric vehicles—a review. Int J Life Cycle Assess 17(8):997–1014
Hawkins TR, Singh B, Majeau-Bettez G, Strømman AH (2013a) Comparative environmental life cycle assessment of conventional and electric vehicles. J Ind Ecol 17(1):53–64
Hawkins TR, Singh B, Majeau-Bettez G, Strømman AH (2013b) Corrigendum to: Hawkins TR, Singh B, Majeau-Bettez G, Strømman A-H (2012) Comparative environmental life cycle assessment of conventional and electric vehicles. J Ind Ecol 17(1):158–160. https://doi.org/10.1111/j.1530-9290.2012.00532.x
Heinicke S (2014) Customer service professional, Infineon Technologies AG. E-mail communication with Nordelöf A. 12 June 2014 and 16 June 2014
Hischier R, Classen M, Lehmann M, Scharnhorst W (2007) Life cycle inventories of electric and electronic equipment: production, use and disposal. Ecoinvent report 18. Swiss Centre for Life Cycle Inventories, Dübendorf, Switzerland (Data v2.0)
Hughes A, Drury B (2013) Electric motors and drives: fundamentals, types and applications. Elsevier Science & Technology Books
Husain I (2011) Electric and hybrid vehicles: design fundamentals. 2nd edn. CRC Press, Taylor & Francis Group
Infineon (2008) Material content data sheet: HybridPACK™1, production year 2009. vol Revision 1.0. 6 September 2008. Infineon Technologies AG, Neubiberg, Germany (Full declaration of all materials present in the product above a threshold of 0.1% b.w)
Infineon (2009) Material content data sheet: HybridPACK™2, production year 2009. vol Revision 1.0. Infineon Technologies AG, Neubiberg, Germany (Full declaration of all materials present in the product above a threshold of 0.1% b.w)
Infineon (2010a) HybridPACK™1—general information and mounting instruction. Infineon Technologies AG, Warstein, Germany (Application note, v1.1 2010-08-10)
Infineon (2010b) HybridPACK™2—general information and mounting instruction. Infineon Technologies AG, Warstein, Germany (Application note, v2.0 2010-08-10)
Infineon (2011) Technishe Information / technical information IGBT Module FS800R07A2E3. vol Revision 3.0. Infineon Technologies AG, Germany (Technical specification/datasheet for IGBT module)
Infineon (2012a) HybridPACK™—application note: hybrid kit for HybridPACK™1—evaluation kit for applications with HybridPACK™1 module. Infineon Technologies AG, Munich, Germany (Application note, v2.5 2012-03-30)
Infineon (2012b) Product brief: HybridPACK™1—power module for hybrid- and electric vehicles. Infineon Technologies AG, Neubiberg, Germany (Product brief, order no B136-H9464-G1-X-7600)
Infineon (2012c) Product brief: HybridPACK™2—power module for hybrid- and electric vehicles. Infineon Technologies AG, Neubiberg, Germany (Product brief, order no B136-H9419-G1-X-7600)
Infineon (2014) HybridPACK™—application note: hybrid kit for HybridPACK™2—evaluation kit for applications with HybridPACK™2 module. Infineon Technologies AG, Munich, Germany (Application note, v2.4, 2014–08-11)
Inmotion (2016) High voltage motor controllers for hybrid and electric vehicles. Inmotion Technologies AB, Stockholm, Sweden (Technical specification/datasheet for inverter unit / ACH GEN2 Datasheet, 1P129092 3.11)
Inunza Soriano M, Laudon NP (2012) Comparative LCA of electrified heavy vehicles in urban use. Chalmers University of Technology, Gothenburg
Johansson J (2015) Technical specialist power electronics, Volvo Group Trucks Technology, Volvo Group. Personal communication with Nordelöf A. April 9:th, 2015
Kang SS (2012) Advanced cooling for power electronics. In: Integrated Power Electronics Systems (CIPS), 2012 7th International Conference on, Nuremberg, Germany, 6–8 March 2012. VDE Verlag GmbH, pp 1–8
KCC (2012) Technical specification of DCB substrates. 2012. KCC Corporation, Jeonju, South Korea (Technical specification, 12-001)
Krah JO, Richter R, Toubin L, Wiese A (2013) Increasing energy efficieny in motor-integrated inverters with SiC-MOSFETs. vol Version 1. 2013: P-118-E-10-2013-v1. EBV Elektronik, Germany (White paper)
Lapp (2012) SKINTOP® MS-SC-M product information. Lapp Group, Germany (Technical data sheet, document no. PN 0486/01_03.10)
Mersen (2013) Bus bar solutions—electrical power distribution. Mersen Corporation, Rochester, New York, USA (Product guide for electrical power distribution)
Miller JM (2013a) Electric Motor R&D Project ID: APE051. Paper presented at the 2013 U.S. DOE Hydrogen and Fuel Cells Program and Vehicle Technologies Program Annual Merit Review and Peer Evaluation Meeting
Miller JM (2013b) Oak Ridge National Laboratory Annual Progress Report for the Power Electronics and Electric Motors Program. Annual Progress Report - Advanced Power Electronics and Electric Motors. ORNL/TM-2013/498. Electrical and Electronics Systems Research Division, Oak Ridge National Laboratory, US Department of Energy, USA
Mitsubishi (2014) IGBT modules application note. Mitsubishi Electric Corporation, Japan (Application note, 12NF/24NF/24A series)
Montanari D, Saarinen K, Scagliarini F, Zeidler D, Niskala M, Nender C (2008) Film capacitors for automotive and industrial applications. In: CARTS Europe 2008, Helsinki, Finland, 20–23 October 2008. Curran Associates, Inc., pp 70–84
Nan Ya Plastics (2008) Material data safety sheet—FR-4-86 epoxy woven fiberglass copper clad laminate and Prepreg. CCL Technical Department, Electronic Materials Division, Nan Ya Plastics Corporation, Taipei, Taiwan (MSDS for FR-4 type printed circuit board)
Nordelöf A (2017) Scalable Power Electronic Inverter LCI Model.xlsm [Online]. Version 1.0. Gothenburg, Sweden: Environmental Systems Analysis; Chalmers University of Technology. Distributed by The Swedish Life Cycle Center. Available: http://cpmdatabase.cpm.chalmers.se/Scripts/sheet.asp?ActId=JT-2016-06-21-39. (Gate to gate life cycle inventory in Microsoft Excel Macro-Enabled Worksheet)
Nordelöf A, Alatalo M (2017) A scalable life cycle inventory of an automotive power electronic inverter unit—technical and methodological description, version 1.0. 2017: ESA report no. 2016:5. Department of Energy and Environment, Divisions of Environmental Systems Analysis & Electric Power Engineering, Chalmers University of Technology, Gothenburg, Sweden
Nordelöf A, Messagie M, Tillman A-M, Ljunggren Söderman M, Van Mierlo J (2014) Environmental impacts of hybrid, plug-in hybrid, and battery electric vehicles—what can we learn from life cycle assessment? Int J Life Cycle Assess 19(11):1866–1890
Nordelöf A, Grunditz E, Tillman A-M, Thiringer T, Alatalo M (2017) A scalable life cycle inventory of an electrical automotive traction machine—technical and methodological description, version 1.01. 2017: ESA report no. 2016:4 (version 1.01 updated 2017). Department of Energy and Environment, Divisions of Environmental Systems Analysis & Electric Power Engineering, Chalmers University of Technology, Gothenburg, Sweden
Nordelöf A, Grunditz E, Tillman A-M, Thiringer T, Alatalo M (2018) A scalable life cycle inventory of an electrical automotive traction machine—part I: design and composition. Int J Life Cycle Assess 23(1):55–69
Ouneva (2015) Product catalog: electrical components and enclosure accessories. Ouneva Group, Tuupovaara, Finland (Product catalog)
Ozpineci B (2014) Oak Ridge National Laboratory Annual Progress Report for the Power Electronics and Electric Motors Program. Annual Progress Report - Advanced Power Electronics and Electric Motors. November, 2014: ORNL/SPR-2014/532. Electrical and Electronics Systems Research Division, Oak Ridge National Laboratory, US Department of Energy, USA
Ozpineci B (2016) Oak Ridge National Laboratory Annual Progress Report for the for the Electric Drive Technologies Program. ORNL/SR-2016/640. Electrical and Electronics Systems Research Division, Oak Ridge National Laboratory, US Department of Energy, USA
Rose (2016) Standard Enclosures. ROSE Systemtechnik GmbH, Porta Westfalica, Germany (Product catalogue for standard enclosures of electronic equipment)
Salcone M, Bond J (2009) Selecting film bus link capacitors for high performance inverter applications. In: Electric Machines and Drives Conference, 2009. IEMDC '09. IEEE International, 3-6 May 2009. pp 1692–1699. https://doi.org/10.1109/iemdc.2009.5075431
Sarlioglu B, Morris CT, Han D, Li S (2015) Benchmarking of electric and hybrid vehicle electric machines, power electronics, and batteries. In: 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), 2-4 September 2015. pp 519–526. https://doi.org/10.1109/OPTIM.2015.7426993
Sheng WW, Colino RP (2005) Power electronic modules—design and manufacture. CRC Press LLC, Boca Raton
Siemens (2014) ELFA2 Traction Inverter. November, 2014. Siemens AG, Germany. (Technical specification/datasheet for inverter unit / ELFA2_Dxx-650Wx-x_Data_Sheet_AC)
Siemens (2015a) Innovative technology for hybrid and electric vehicles. Siemens AG, Germany (Article-No.: DFEC-B10005-00-7600)
Siemens (2015b) SIVETEC Power Electronics. Siemens AG. www.industry.siemens.com. Accessed 2015–03-25
Stahler D (2013) Types of wound film capacitors. U.S.Tech – The Global Electronics Publication. Arizona Capacitors Inc., Tucson, Arizona, Mid-Atlantic Tech Publications, Phoenixville, Pennsylvania, USA (Company white paper published via on-line electronics manufacturing magazine)
Stigben M (2004) Applying laminated busbars to enhance DC power distribution systems. In: INTELEC 2004. The 26th Annual International Tecommunications Energy Conference 2004, Chicago Illinois, USA, 19–23 September 2004. IEEE, Piscataway, New Jersey, USA, pp 537–541. https://doi.org/10.1109/INTLEC.2004.1401521
Storm (2016) Laminated bus bar insulation. Storm Power Components. http://stormpowercomponents.com/assets/content/downloads/Laminated-Product-Guide_3.2.pdf. Accessed 23 Nov 2016
Tan KL, Vivet L, Morelle JM, Pierre B, Bienve-Nu Y, Kaabi A (2010) Innovative materials of automotive power packaging. In: Integrated Power Electronics Systems (CIPS), 2010 6th International Conference on, 16-18 March 2010. pp 1–7
TE Connectivity (2017) Live Chat option, PIC English-Global Team, Agent Florin S Technical support chat with Nordelöf A 13:28:25, Monday, January 23, 2017
Thomas & Betts (2005) 2005 Cable Glands Catalogue. Thomas & Betts Australasia Pty Ltd, Lidcombe, New South Wales, Australia (Product catalog)
Topline (2016) Surface mount nomenclature and packaging. TopLine Corporation. http://www.topline.tv/catalog.cfm. Accessed 23 Sept 2016
Tyco (2010) AMPSEAL Sealed Connector Series. Tyco Electronics AMP GmbH, Bensheim, Germany (Product group technical description, doc no. 1654285-3)
Vishay (2012) General technical information—film capacitors. 2012. Vishay Roederstein, Vishay Intertechnology, Pennsylvania, USA (Product group technical description, doc. no. 26033)
Volke A, Hornkamp M (2012) IGBT modules—technologies, driver and application. 2nd edn. Infineon Technologies AB, Munich, Germany
Volkswagen (2014a) Electrifying—the e-Golf. Viavision. Volkswagen Aktiengesellschaft Konzernkommunikation. Verlag Rommerskirchen GmbH & Co. KG, Remagen, Germany. (Company technical information brochure)
Volkswagen (2014b) The Golf GTE—the best of both worlds. Viavision. Volkswagen Aktiengesellschaft Konzernkommunikation. Verlag Rommerskirchen GmbH & Co. KG, Remagen, Germany (Company technical information brochure)
Volvo Bus Corporation (2015) Volvo Electric Concept Bus. TP 14621. Volvo Bus Corporation, Gothenburg, Sweden (Technical specification for small city bus, BED 00685.15.05 SE)
Volvo Bussar (2016) Volvo 7900 Electric. Volvo Bussar AB, AB Volvo, Göteborg, Sverige. (Product brochure in Swedish for Volvo's all electric bus in the 7900 series, RSP 84835.16.03. SE)
Volvo Car Corporation (2011) Volvo C30 Electric. Supplement to owner’s manual. TP 14621. Volvo Car Corporation, Gothenburg, Sweden (User manual)
Volvo Car Corporation (2013) Volvo V60 Plug-In Hybrid. TP 14621. Volvo Car Corporation, Gothenburg, Sweden (Technical specification)
Von Roll (2013) Varnish - Damicoat® 2405-2 Natural. Von Roll France SA, France (Product datasheet)
Walraven (2011) Data sheet surface treatment. Walraven Better Installation Systems, Walraven Ltd., United Kingdom
Wen H, Xiao W, Wen X, Armstrong P (2012) Analysis and evaluation of DC-link capacitors for high-power-density electric vehicle drive systems. IEEE Trans Veh Technol 61(7):2950–2964
Wernet G, Bauer C, Steubing B, Reinhard J, Moreno-Ruiz E, Weidema B (2016) The ecoinvent database version 3 (part I): overview and methodology. Int J Life Cycle Assess 21(9):1218–1230
Acknowledgements
The authors would like to express their gratitude to the Area of Advance Energy at Chalmers University of Technology for financing the project and thus stimulating the cross-disciplinary research cooperation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible editor: Zbigniew Stanislaw Klos
Preamble
This is the first article in a series of two presenting a new scalable life cycle inventory (LCI) data model of a power electronic inverter unit for control of electrical machines in vehicles, available to download. In part I, it is described how the LCI model was established, how it is structured, and the type of results it provides, including a validating comparison with real-world inverter units. It also covers design data and the principles for scaling of the main active parts—the power module and the DC link capacitor. Part II presents how new production datasets were compiled from literature and factory data to cover the manufacturing chain of all parts, including the power module fabrication, mounting of printed circuit boards, and the complete assembly. Part II also explains the data collection methods, system boundaries, and how to link the gate-to-gate inventory to the Ecoinvent database in order to establish a complete cradle-to-gate LCI.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Nordelöf, A., Alatalo, M. & Söderman, M.L. A scalable life cycle inventory of an automotive power electronic inverter unit—part I: design and composition. Int J Life Cycle Assess 24, 78–92 (2019). https://doi.org/10.1007/s11367-018-1503-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11367-018-1503-3