
Abstract
A traffic noise system involves several subsystems like road traffic subsystem, human subsystem, environment subsystem, traffic network subsystem, and urban prosperity subsystem. The study’s main aim was to develop road traffic noise models using a graph theory approach involving the parameters related to road traffic subsystem. The road traffic subsystem variables selected for the modeling purposes included vehicular speed, traffic volume, carriageway width, number of heavy vehicles, and number of honking events. The interaction of the selected variables considered in the form of permanent noise function is given in the matrix form. Eigenvalues and corresponding eigenvectors are calculated for removing any human judgmental error. The permanent noise function matrix was then updated using the eigenvectors, which was ultimately utilized for obtaining the permanent noise index. Data regarding the selected variables were collected for three months, and the noise parameters included in the study were equivalent noise level (Leq,1h), maximum noise level (L10,1h), and background noise level (L90,1h). A logarithmic transformation was applied to the permanent noise index and linear regression models were developed for Leq,1h , L90,1h , and L10,1h respectively. The models were validated using the data collected from the same locations for nine months. The models were found to provide satisfactory results, although the results were somewhat overestimated. The method can prove beneficial for estimating future noise levels, given the expected changes in values for the independent variables considered in the study.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
All the developing nations, including India, face the problem related to vehicular noise due to a continuous exponential increase in the number of vehicles on the road, which ultimately increases the environmental noise levels (Singh et al. 2016a). It has been estimated that more than 50% of the environmental noise is contributed from road traffic (D. Banerjee et al. 2008; El-Fadel et al. 2002; Tandel et al. 2011). Traffic noise causes deterioration of people’s comfort and quality of life, residing close to the transportation infrastructure (Dibyendu Banerjee 2012). Although transportation infrastructure is the essential requisite for any developing society, its negative aspects have received no or little attention as it provides means for satisfying the mobility and accessibility demand (Hamad et al. 2017). This has led to a range of environmental problems, including traffic noise. Authorities worldwide have focused more on the issues related to air, water, and soil pollution, but noise pollution hasn’t received its due share (K. Kumar et al. 2011), which may be due to the property of being invisible besides having profound implications only in the long run (Dratva et al. 2010; Foraster et al. 2014; Lercher 1996; Seidler et al. 2016). However, recent research has projected noise as a severe pollutant that can cause both physiological and psychological effects. The effects include annoyance (Ouis 2001), hypertension(Barregard et al. 2009; Chang et al. 2011), sleep disturbance (Halperin 2014; Jakovljević et al. 2006), hearing mechanism dysfunction (Barrigón Morillas et al. 2002), myocardial infarction (Babisch et al. 2005; Paunovic and Belojević 2014; Selander et al. 2009), cardiovascular diseases(Begou et al. 2020; Davies and Van Kamp 2012; T. Munzel et al. 2014; Thomas Munzel et al. 2018), metabolic diseases like diabetes (Dzhambov 2015; Mette et al. 2013), and psychotropic medication use (Okokon et al. 2018). Based on the studies reported and growing evidence, the focus has shifted toward transportation-related noise pollution for its proper control and management.
The paper is structured in the following manner. The “Some of the developed traffic noise models” section gives an overview about the various traffic noise models that have been developed in various countries along with the parameters used for modeling purposes. Following this, the “Graph-theoretic approach” section provides an introduction about the GTA (graph-theoretic approach) for modeling purposes besides giving a brief list about the various advantages of using this technique. The “Methodology” section provides the methodology adopted for developing the models. The “Results” section presents the results and validation of the model. This is followed by the “Discussion” section while the “Strengths and limitations” section presents the strengths, limitations, and future scope of the work. This is followed by the “Conclusions” section.
Some of the developed traffic noise models
Traffic noise models play an essential role in designing acoustic friendly roads and assessing traffic noise’s impact on the residents living near the transportation infrastructure like highways and major roads. (Pamanikabud and Tansatcha 2003; Rajakumara and Mahalinge Gowda 2009). Several mathematical models have been developed worldwide to estimate RTN (road traffic noise) levels, using the data for the parameters used for modeling purposes. However, given the noise’s stochastic nature, it can be described quantitatively using the estimate of certain indices, and its actual value is known only to mother nature (Farrelly and Brambilla 2003). The development of traffic noise models is not a new procedure, and continuous improvements have occurred over time. These include considering the vehicular noise in a different perspective (i.e., rolling noise and engine noise), the effect of road pavements, the effect of temperature, the effect of screening from the nearby walls, ground effects, and atmospheric absorption. Improvements have also occurred in terms of the methods used for developing models. In addition to generally used regression analysis (Agarwal and Swami 2011; Rajakumara and Mahalinge Gowda 2009), techniques such as artificial neural networks (ANN) (Cammarata et al. 1995; Givargis and Karimi 2010), genetic algorithms (GA) (Gündoğdu et al. 2005; Rahmani et al. 2011), decision trees (DT) (Quinlan 1986), and random forests (RF) (Singh et al. 2016a) have been successfully used.
Different traffic noise models like FHWA (Federal Highway Administration), CoRTN (Calculation of Road Traffic Noise), and RLS-90 predict the noise levels based on the corrections applied to a mean reference energy level (A-weighted peak pass-by noise level generated by a single moving vehicle at a distance of 15m using a sound level meter placed at the height of 1.5m above the ground) (Steele 2001). These models have been applied to the traffic scenarios of the developed countries (for which they were originally developed) successfully for a long period with data about the relevant parameters. Modifications in some of these models for specific regions have also been made (Givargis and Mahmoodi 2008). Some of the parameters usually considered include traffic volume (Gulliver et al. 2015); the distance of measuring point from traffic lane; vehicular speed (Johnson and Saunders 1968; P. Kumar et al. 2014); percentage of heavy vehicles (To WM et al. 2002); road pavement surface (Cho and Mun 2008); gradient (Tang and Tong 2004); reflection from surrounding surfaces (Thorsson and Ögren 2005); the equivalent number of vehicles (Rahmani et al. 2011); driver characteristics like gender, skill, reaction time (Calvo et al. 2012), road bumps (Radhiah Bachok et al. 2017), and acceleration/deceleration; traffic congestion, and traffic signals (Can et al. 2008; StoIlova and StoIlov 1998).
These parameters have been used worldwide by researchers for traffic noise modeling. Modeling the dynamic aspects of traffic noise arising due to vehicle interaction and congestion near roundabouts was done by Chevallier et al. (Chevallier et al. 2009). The model uses a traffic flow simulation tool along with a sound propagation model and noise emission laws. Monte Carlo technique based noise prediction model was developed to include the uncertainty during the estimation of traffic noise (Lam and Tam 1998). A statistical model for urban settings was developed by Calixto et al. (Calixto et al. 2003). Based on neural networks, a model was developed for Indian traffic conditions by Kumar et al. (P. Kumar et al. 2014). The model achieved a good fit but lacked the usage of a large sample size. Another model based on neural networks was developed for New Delhi, India (N. Garg et al. 2015). The study utilized the classified traffic volume and classified vehicular speeds as the relevant parameters. A comparison between linear regression and neural network methods of prediction revealed that neural networks outperformed the linear regression technique. A study conducted in Patiala, Punjab, was done using four soft computing techniques of neural networks, decision trees, random forests, and generalized linear models (Singh et al. 2016a). The parameters used included traffic volume, traffic speed, and the percentage of heavy vehicles. The study revealed that the random forest approach was best suited for the study area’s traffic conditions. A study carried out in Nagpur, India used multiple linear regression for modeling the road traffic noise. The parameters included were traffic volume, speed and honking of light and heavy vehicles. The model provided an improvement in the noise prediction due to inclusion of honking as a parameter (Thakre et al. 2020). An open-source noise model using GIS (Geographic information system) for 2 British cities of Leicester and Norwich was developed by Gulliver et al. (Gulliver et al. 2015). Another model based on GIS was developed for road conditions in China (Li et al. 2002). The European Commission has undertaken the CNOSSOS-EU (Common noise assessment methods in Europe) project, making it mandatory for all the European member states to adopt a standard noise evaluation method out of a series of suggested models (Kephalopoulos et al. 2014). The models are to be evaluated based on simplicity, accuracy, precision, computational speed, and flexibility. A review on the principal traffic noise models like FHWA, CoRTN, RLS-90, ASJ RTN-2008, NMPB-routes 2008, and the CNOSSOS-EU model has been presented by Garg and Maji (Naveen Garg and Maji 2014). Comparisons have been made based on source modeling and sound propagation algorithm.
Genetic algorithms have also been used for modeling traffic noise. A study conducted in Erzurum city in eastern Turkey modeled traffic noise based on classified traffic volume, the maximum allowable noise level for a vehicle, road gradient, and building height ratio to road width (Gündoğdu et al. 2005). Another study conducted in Mashhad, Iran, used genetic algorithms for predicting noise levels using vehicle composition, speed, and traffic volume as the relevant parameters. The models were validated with in-field measurements (Rahmani et al. 2011). The traffic noise prediction model for Thailand was developed by Suksaard et al. (Suksaard et al. 1999). The model was based on classifying the vehicles as light and heavy vehicles and used vehicular speed as the relevant parameter. The model was found to be applicable up to 10 lane highways, up to a distance of 12m vertically, and up to a speed limit of 30 to 140 kmph.
The literature review reveals that different models have been developed for the prediction of RTN levels. The problem that arises in applying the standard models developed for western countries in developing countries is the variation in the local conditions that can affect the RTN. The nature of pavement surfaces, aged vehicles, heterogeneous traffic conditions, speed constraints, pavement width, and percentage of heavy vehicles differ from those used to develop some of the most commonly used models (Sisman and Unver 2011). Studies conducted by Prabat and Nagarnaik (Parbat and Nagarnaik 2008) concluded that India's traffic scenario is characterized by conditions like high levels of congestion, high noise levels, and low traffic facilities, and these differ significantly from the conditions prevalent in the European countries.
The present work is based on evaluating the suitability of GTA in predicting traffic noise levels for heterogeneous traffic conditions prevalent in developing countries like India. Most previous works have applied regression, neural networks, genetic algorithms, and GIS for the noise level prediction. However, GTA's application under Indian traffic conditions was found in very limited number of studies during the literature review. As per the authors, the study is probably one of the few studies in which the application of GTA for RTN level prediction is evaluated under heterogeneous traffic conditions. A brief introduction and usefulness of GTA are provided in the next section.
Graph-theoretic approach
The approach consists of identifying the traffic noise as a system that is composed of several subsystems. These subsystems are further comprised of parameters, and it is the interaction between these parameters that results in the outcome. There are several advantages of using GTA over other methods. Some of these advantages include
-
Many of the traditional models were developed to give the overall impact of the parameters considered. However, the traffic noise system is comprised of various subsystems that influence one another, and their interaction should not be ignored. This fact is readily incorporated in GTA.
-
It is simple, easy to use, and flexible in its application to various scenarios, where the direct application of traditional models may not be apt.
-
It has the flexibility of including subjective inputs, human opinions, and fuzziness of the real-life scenarios.
-
Being a matrix method, GTA can be utilized for computer programming when the number of variables and database is extensive.
All the subsystem variables considered and their interactions with each other are represented in the form of a matrix known as PFM (permanent function matrix). The model, along with the relevant parameters, is described in the form of a block diagram and then based on intuition, previous works, and expert opinion weights for the interaction terms are assigned (Prabhakaran et al. 2006; Ratha and Agrawal 2015). The inconsistencies that may arise due to improper human judgment are taken care of using the Eigenvalue approach, as has been proved in the pioneering work of Hwang and Yoon (Hwang and Yoon 1981). The PFM is then updated, and permanent of the updated matrix is calculated as shown in Eq. 1:
∏ represents the product function; σ(i) represents the ith member of the ‘n’ permutation groups;∑ represents the sum of the terms where each term is the product of ai, σ(i) for i = ‘1’ to ‘n’ for a ‘n x n’ matrix. The sum extends over all elements σ of the symmetric groupSn; i.e., over all the permutations of the numbers 1, 2…n.
Methodology
A systems approach has been utilized for modeling traffic noise. Usually, the RTN system consists of various subsystems that contribute to the area's overall acoustic scenario. The subsystems are themselves comprising of parameters that would influence the total noise produced. The traffic noise system, along with its relevant subsystems, is shown in Fig. 1 below:

Components of the road traffic noise system along with the respective parameters
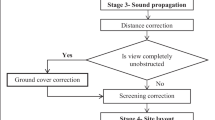
In the present study, five road traffic subsystem parameters were considered for modeling the traffic noise. The parameters were selected based on the literature review, which revealed that traffic noise levels are mostly modeled using parameters like traffic volume, traffic speed, number of heavy vehicles, road width, and gradient. The selected parameters included traffic volume per hour (S1) (excluding the volume of heavy vehicles like buses and trucks); carriageway width, in meters (S2); average traffic speed, in kmph (S3); number of heavy vehicles (S4) per hour; and number of honking events (S5) per hour. The selected study sites had a significant volume of heavy vehicles; hence, it was chosen as a separate variable. A flowchart representing the step by step methodology of the study is shown in Fig. 2.

Flowchart of the various steps followed during the formulation of the models
Construction of the block diagram of the model
Five roadway sections of different zones were selected for the study. Two were from commercial zones, one was from a silence zone, one was from a residential zone, and one was a mixed residential cum commercial zone. The parameters selected for modeling purposes were arranged in such a way that the interactions between the relevant parameters was indicated using unidirectional and bidirectional arrows. From the literature, as well as the real-life observations, the interactions between the parameters were considered. The block diagram representing the variables of the study and their interactions is shown in Fig. 3. For example, both traffic volume (S1) and traffic speed (S3) interact with each other with higher traffic volumes leading to higher traffic speed and conversely traffic speed affects traffic volume therefore both are connected with the help of a bidirectional connector. The interactions between them is shown as e13 and e31. Traffic volume (S1) can affect the number of horns per hour (S4) but the reverse interaction is not present, hence both the variables are connected with a unidirectional connector and e14 represents the interaction between them. Street width (S2) can affect the number of vehicles per hour (S1) with narrow street leading to lesser traffic volume and wider streets leading to higher traffic volumes. The reverse interaction is not present hence both these variables are connected with a unidirectional connector and e21 represents the interaction between them. Street width (S2) can affect the number of horn (S4) events reported in a given interval of time, with wider streets often reporting more honking due to higher traffic volumes. The reverse interaction is not feasible and hence both the variables have been connected with a unidirectional connector and e24 represents the interaction between them. Wider streets often lead to higher traffic speeds and narrower streets leading to lower traffic speeds, this is why street width (S2) and traffic speed (S3) have been connected with a unidirectional connector with e23 representing the interaction between them. The number of heavy vehicles does not affect any of the variables and as such the variable was not connected with any other variable.

Block diagram representing the model parameters along with the interactions
Data collection
All five selected sites were initially surveyed for one week to select the morning, afternoon, and evening rush hours. The selection of the time periods was done in order to develop models for the worst case scenario of traffic noise levels. Data collection was performed for three months, from Oct to Dec 2019. Traffic volumes were obtained through video recordings, and average speed was also obtained from video graphic measurements by marking an initial distance of 50 m over the road surface. Time taken to cross the markings was obtained from the video timer. Knowing both distance and time, speed was calculated. The number of horns blown per hour was also obtained from the video recordings. Traffic noise levels were measured using a Casella CEL-633C class 1 sound level meter, which was calibrated using a Casella CEL-120/1 class 1 acoustic calibrator. The measurements were made as per ISO 1996-1 (ISO 2003). Noise descriptors Leq,1h dB(A), L10,1h dB(A), and L90,1h dB(A) were selected as the relevant noise parameters. Their values were directly obtained from the sound level meter software.
Development of PFM for study sites
For the development of PFM, there is a need to assign weights to the main parameters considered in the study, represented along the diagonal of the PFM, and assign weights to the interaction terms. The data of 3 months’ duration were averaged and then used for assigning the weights. The data for the three rush hours of each site is given below Table 1, Table 2, and Table 3. The variable with the highest value was assigned a weight of 5, and one with the lowest value was assigned a weight of 1 (Nigel Cross 2000). For all the remaining three values, interpolation was used to assign the weights.
For morning rush hour, traffic volume per hour ranged from 243 to 519. Thus, a weighting of 5 is assigned to the main chowk site, and a weighting of 1 is given to the old town road. The number of heavy vehicles ranged from 2 to 107, and thus a weight of 1 is assigned to the hospital road, and a weight of 5 is assigned to the old town road. The average speed values ranged from 18.4 to 38.2 kmph. Hence, 1 is assigned to hospital road, and 5 is assigned to the old town road. The width of road pavements ranged from (4.9 to 6.2) m, so weights of 1 and 5 are assigned to old town road and azad gunj road, respectively. A similar approach is applied while assigning the weights for the other two rush hours.
The values of interactions are based on logical reasoning and correlational analysis (Nicol and Wilson 2004). As traffic volume and average speed are strongly related, a weight of 4 is assigned to their interaction. The relation with other parameters is nonexistent, and as such, a weight of 1 is assigned to them. Generally, there is a tendency among drivers that they drive at higher speeds if the pavement is of sufficient width thus, a weight of 3 has been assigned to their interaction. Street width and the number of heavy vehicles may be related to some extent, so 2 is given to their interaction. Street width is strongly related to traffic volume, hence the weight of 4 is assigned. Street width is also related to traffic speed moderately; therefore, the weight of 3 has been given. Street width is not associated with the number of horns, and as such, a weight of 1 has been assigned. The speed of the vehicle is strongly related to traffic volume; hence, the weight of 4 has been set. A nonexistent relation was considered for all other parameters, and thus a weight of 1 has been assigned. The number of horns is not related to any of the other parameters, and therefore the weight of 1 was set for the interactions. The number of heavy vehicles can affect vehicular speeds. Generally heavy traffic leads to the lowering of traffic stream speed due to the reluctance of other vehicles to perform overtaking maneuvers; however, the relation is not a very strong one and thus a weight of 2 was assigned for their interaction. Interactions with other variables were considered to be nonexistent. Therefore, a value of 1 has been set. The procedure adopted for assigning the weights was taken from Nigel's work (Nigel Cross 2000). The eigenvalue formulation is done as:
where A is the PFM of a given site; I is an identity matrix; λ is the eigenvalue spectrum, wT is the eigenvector's transpose. The solution of Eq. 2 yields (A − λ I) = 0; thus, a spectrum of eigenvalues are obtained. Corresponding to the maximum eigenvalue, the eigenvector is calculated, such that ∑wi = 1. wi is eigenvector used to modify the ith column of PFM. After updating the PFM, the matrix's permanent is calculated, represented as PNI (permanent noise index) from Eq. 1. The initial PFM and the updated PFM for morning rush hour are shown in Table 4. Similarly, PFM’s obtained for afternoon and evening rush hours are shown in Table 5 and Table 6, respectively. The obtained noise parameters including hourly equivalent noise level, Leq, 1h dB(A), background noise level, L90, 1h, dB(A), and maximum noise level, L10, 1h dB(A), are then correlated with the obtained PNI values to check the appropriateness of the PNI as a representation of the overall acoustic environment. The values of the noise parameters and PNI are shown in Table 7.
Results
The variation of PNI with noise parameters for the three rush hours for the data collected is shown below Fig. 4, Fig. 5, and Fig. 6. The usage of PNI was found to correlate well with all three selected noise parameters. To verify and measure this correlation, Pearson’s correlation coefficient and linear regression was performed between the observed values for the selected noise indices and PNI. The results for the correlation between PNI values and noise levels for the three rush hours are shown in Table 8. A logarithmic transformation was applied for PNI so that uniformity with noise levels is maintained (which are also measured on a logarithmic scale). The results obtained from linear regression are shown in Table 9 and they clearly show a high value of R, R2, and adjusted R2. This means that using the five parameters incorporated in PNI, 92%, 79.5%, and 85.2% of the variance in Leq, 1h values for the morning, afternoon, and evening rush hour can be explained. Variation of 90.7%, 74.2%, and 96% in L10, 1h can be explained using PNI for the morning, afternoon, and evening rush hours, respectively. Variation of 98%, 91%, and 80.6% in L90, 1h can be accounted for, using PNI for the morning, afternoon, and evening rush hours, respectively.

Variation of Leq,1h with PNI for the selected sites during the morning (a), afternoon (b), and evening (c) rush hour

Variation of L10,1h with PNI for the selected sites during the morning (a), afternoon (b), and evening (c) rush hour

Variation of L90,1h with PNI for the selected sites during the morning (a), afternoon (b), and
evening (c) rush hour
Validation of the developed models
To validate the developed models, data collection for the same sites was done for nine months from Jan to Sep 2020. Average values for three months each were used for testing the models. This was done because the data collection for model development was done for three months. The results of the same are shown in Table 10. The results were further evaluated by plotting the measured values against the predicted values as shown in Fig. 7. The R2 values revealed a good agreement between the measured and predicted values.

A plot of measured and predicted values of Leq, 1h (a), L90, 1h (b), and L10, 1h (c) as per developed models
Usage of other subsystems
In this study, only a single subsystem was used. The addition of more subsystems can be done using the GTA. This involves integrating other subsystems by calculating PNI values for all other subsystems and then forming another PFM using PNI values as the diagonal elements and the interactions of the subsystems as the off-diagonal elements. Such an analysis can result in better predictions.
Discussion
The development of noise models is not a new procedure as far as developed countries are concerned. However, for developing nations like India, more emphasis needs to be given to environmental noise modeling of which traffic noise forms a significant contributor. The study presented a novel and parsimonious procedure for predicting RTN levels. RTN models play a vital role in designing new roads by estimating the expected noise levels and assessing the changes that may occur due to the anticipated changes in any contributing variables over a given period. A systems approach has been adopted in the study. RTN system is comprised of various subsystems like road traffic subsystem, human subsystem, environmental subsystem, traffic network, and urban subsystem.
In the present study, five parameters from the traffic subsystem were considered. These included traffic volume, traffic speed, the volume of heavy vehicles, pavement width, and honking. The inclusion of honking was done because it is the main characteristic of road traffic in developing countries, including India. Besides, some studies have also shown improvements in traffic noise modeling by including honking as a parameter (Kalaiselvi and Ramachandraiah 2016; Sharma et al. 2014; Vijay et al. 2014, 2015). All the variables were incorporated in a matrix form by assigning the weights to the selected parameters, represented along the matrix's diagonal, and weights were assigned to the variables' interactions, represented by the off-diagonal elements. Assignment of weights for the main parameters was done based on the data collected from the field, and for interactions, the weights were decided based on intuition and established knowledge. As the development of PFM involved human factor, PFM was updated using the eigenvalue formulation, and permanent of the updated matrix, represented as PNI, was calculated. The usage of PNI was validated using graphical analysis. The study's traffic noise parameters were equivalent noise level Leq,1h, and percentile values L10,1h , and L90,1h. Models were developed by performing simple linear regression between noise parameters and PNI values. All the models resulted in a good fit for the collected data. The validity of the models was tested for nine months. The models showed a reasonably good fit, although a decrease in the R2 values was obtained. The models were found to overestimate the noise parameters' values, which ranged from (0.58 to 2.88) dB(A). This shows that the models performed reasonably well over the given period. However, the inclusion of other subsystems can help in the further improvement of the models.
Strengths and limitations
The strengths of the present study can be summarized as:
-
This is the first study performed in the state of Jammu and Kashmir in which the modeling of road traffic noise has been undertaken.
-
As per the author’s knowledge, the application of GTA in RTN prediction has not been undertaken in any of the studies conducted under heterogeneous traffic conditions prevalent in India. Although one study (Singh et al. 2016b) depicting GTA's application was found, it was applied to the data obtained from London, which has different traffic and acoustic environment.
-
The models have been validated from the data collected over nine months from Jan to Sep 2020. This period includes winter, summer, and autumn seasons in Jammu and Kashmir. Given the models were found to have good prediction ability, we can infer that models can be applied for different weather conditions. This is an essential feature of the study as various studies have depicted that traffic noise levels are affected by the prevailing weather conditions, especially temperature (Bueno et al. 2011; Hamad et al. 2017).
-
The inclusion of honking in the developed models also adds to the strengths of the model.
-
The GTA is a new and easy to comprehend approach for noise modeling purpose. The models can prove helpful for future research as well.
The limitations of the study include:
-
Only five parameters from one of the subsystems, i.e., traffic subsystem, have been used for modeling.
-
The inclusion of other subsystems and their parameters is an essential component that influences RTN. The present study has considered only one of the subsystems.
-
Developed models were validated only for the sites from which initial data was taken. The applicability of the models for different sites has not been considered. Thus it needs further investigation.
Future scope of work
The inclusion of more subsystems can refine the study. The applicability of the developed models for sites with different traffic environments needs to be evaluated. The work on these two improvements will be undertaken in a separate study. The procedure for the inclusion of other subsystems has already been mentioned in the previous section.
Conclusion
As per World Health Organization, nearly 1.6 million London inhabitants are exposed to noise levels > 55dB(A) every day, which is more than the upper limit responsible for causing severe health issues (Halonen et al. 2015). Given that resource availability in developed countries is much larger than available in developing countries, it becomes imperative for the relevant authorities in developing countries to adopt a more scientific approach while designing the new areas or redesigning the existing infrastructure. Although attention has been given to most of the environmental pollutants, noise pollution remains unattended. In this direction, developing countries need to promote more studies and research. Most developed countries have formulated their traffic noise models, but developing countries have been utilizing either the models used in developed countries or introducing some modifications as per the local conditions. However, such a practice is not feasible everywhere, and as such, studies should be conducted at microlevels. The current study is one such step in this direction. The models developed can be modified to better model the traffic noise levels; however, as an initial step, this can prove beneficial for the authorities in envisaging the current and future acoustical scenarios of the study areas. As per the observed data, noise levels in all the zones exceeded the safer limits set by both international and national regulatory authorities. The study can thus be utilized for testing the various countermeasures as well.
Data Availability
The datasets generated during the current study are not publicly available due to its usage in another study, which is part of the research work currently in progress, but is available from the corresponding author on reasonable request.
References
Agarwal S, Swami BL (2011) Comprehensive approach for the development of traffic noise prediction model for Jaipur city. Environ Monit Assess 172(1–4):113–120. https://doi.org/10.1007/s10661-010-1320-z
Babisch W, Beule B, Schust M, Kersten N, Ising H (2005) Traffic noise and risk of myocardial infarction. Epidemiology 16(1):33–40. https://doi.org/10.1097/01.ede.0000147104.84424.24
Banerjee D (2012) Research on road traffic noise and human health in India: review of literature from 1991 to current. Noise & health 14(58):113–118. https://doi.org/10.4103/1463-1741.97255
Banerjee D, Chakraborty S, Bhattacharyya S, Gangopadhyay A (2008) Evaluation and analysis of road traffic noise in Asansol: an industrial town of eastern India. Int J Environ Res Public Health 5(3):165–171. https://doi.org/10.3390/ijerph5030165
Barregard L, Bonde E, Ohrstrom E (2009) Risk of hypertension from exposure to road traffic noise in a population-based sample. Occup Environ Med 66(6):410–415. https://doi.org/10.1136/oem.2008.042804
Barrigón Morillas J, Gómez Escobar V, Méndez Sierra J, Vilchez Gómez R, Trujillo Carmona J (2002) An environmental noise study in the city of Cáceres, Spain. Appl Acoust 63(10):1061–1070. https://doi.org/10.1016/S0003-682X(02)00030-0
Begou P, Kassomenos P, Kelessis A (2020) Effects of road traffic noise on the prevalence of cardiovascular diseases: the case of Thessaloniki, Greece. Sci Total Environ 703:134477. https://doi.org/10.1016/j.scitotenv.2019.134477
Bueno M, Luong J, Viñuela U, Terán F, Paje SE (2011) Pavement temperature influence on close proximity tire/road noise. Appl Acoust 72(11):829–835. https://doi.org/10.1016/j.apacoust.2011.05.005
Calixto A, Diniz FB, Zannin PHT (2003) The statistical modeling of road traffic noise in an urban setting. Cities 20(1):23–29. https://doi.org/10.1016/S0264-2751(02)00093-8
Calvo JA, Álvarez-Caldas C, San Román JL, Cobo P (2012) Influence of vehicle driving parameters on the noise caused by passenger cars in urban traffic. Transp Res Part D: Transp Environ 17(7):509–513. https://doi.org/10.1016/j.trd.2012.06.002
Cammarata G, Cavalieri S, Fichera A (1995) A neural network architecture for noise prediction. Neural Netw 8(6):963–973. https://doi.org/10.1016/0893-6080(95)00016-S
Can A, Leclercq L, Lelong J, Defrance J (2008) Capturing urban traffic noise dynamics through relevant descriptors. Appl Acoust 69(12):1270–1280. https://doi.org/10.1016/j.apacoust.2007.09.006
Chang T-Y, Liu C-S, Bao B-Y, Li S-F, Chen T-I, Lin Y-J (2011) Characterization of road traffic noise exposure and prevalence of hypertension in central Taiwan. Sci Total Environ 409(6):1053–1057. https://doi.org/10.1016/j.scitotenv.2010.11.039
Chevallier E, Leclercq L, Lelong J, Chatagnon R (2009) Dynamic noise modeling at roundabouts. Appl Acoust 70(5):761–770. https://doi.org/10.1016/j.apacoust.2008.09.009
Cho DS, Mun S (2008) Study to analyze the effects of vehicles and pavement surface types on noise. Appl Acoust 69(9):833–843. https://doi.org/10.1016/j.apacoust.2007.04.006
Nigel Cross (2000). Engineering design methods: strategies for product design. Design (3rd ed.). JOHN WILEY & SONS, LTD.
Davies H, Van Kamp I (2012) Noise and cardiovascular disease: a review of the literature 2008-2011. Noise & health 14(61):287–291. https://doi.org/10.4103/1463-1741.104895
Dratva J, Zemp E, Felber Dietrich D, Bridevaux P, Rochat T, Schindler C, Gerbase MW (2010) Impact of road traffic noise annoyance on health-related quality of life: results from a population-based study. Qual Life Res Int J Qual Life Asp Treat Care Rehab 19(1):37–46. https://doi.org/10.1007/s11136-009-9571-2
Dzhambov AM (2015) Long-term noise exposure and the risk for type 2 diabetes: a meta-analysis. Noise & health 17(74):23–33. https://doi.org/10.4103/1463-1741.149571
El-Fadel M, Shazbak S, Baaj MH, Saliby E (2002) Parametric sensitivity analysis of noise impact of multihighways in urban areas. Environ Impact Assess Rev 22(2):145–162. https://doi.org/10.1016/S0195-9255(01)00101-9
Farrelly FA, Brambilla G (2003) Determination of uncertainty in environmental noise measurements by bootstrap method. J Sound Vib 268(1):167–175. https://doi.org/10.1016/S0022-460X(03)00195-0
Foraster M, Künzli N, Aguilera I, Rivera M, Agis D, Vila J, Bouso L, Deltell A, Marrugat J, Ramos R, Sunyer J, Elosua R, Basagaña X (2014) High blood pressure and long-term exposure to indoor noise and air pollution from road traffic. Environ Health Perspect 122(11):1193–1200. https://doi.org/10.1289/ehp.1307156
Garg N, Maji S (2014) A critical review of principal traffic noise models: strategies and implications. Environ Impact Assess Rev 46:68–81. https://doi.org/10.1016/j.eiar.2014.02.001
Garg N, Mangal SK, Saini PK, Dhiman P, Maji S (2015) Comparison of ANN and analytical models in traffic noise modeling and predictions. Acoustics Australia 43(2):179–189. https://doi.org/10.1007/s40857-015-0018-3
Givargis S, Karimi H (2010) A basic neural traffic noise prediction model for Tehran’s roads. J Environ Manag 91(12):2529–2534. https://doi.org/10.1016/j.jenvman.2010.07.011
Givargis S, Mahmoodi M (2008) Converting the UK calculation of road traffic noise (CORTN) to a model capable of calculating LAeq, 1h for the Tehran’s roads. Appl Acoust 69(11):1108–1113. https://doi.org/10.1016/j.apacoust.2007.08.003
Gulliver J, Morley D, Vienneau D, Fabbri F, Bell M, Goodman P, Beevers S, Dajnak D, J Kelly F, Fecht D (2015) Development of an open-source road traffic noise model for exposure assessment. Environ Model Softw 74:183–193. https://doi.org/10.1016/j.envsoft.2014.12.022
Gündoğdu Ö, Gökdağ M, Yüksel F (2005) A traffic noise prediction method based on vehicle composition using genetic algorithms. Appl Acoust 66(7):799–809. https://doi.org/10.1016/j.apacoust.2004.11.003
Halonen JI, Hansell AL, Gulliver J, Morley D, Blangiardo M, Fecht D, Toledano MB, Beevers SD, Anderson HR, Kelly FJ, Tonne C (2015) Road traffic noise is associated with increased cardiovascular morbidity and mortality and all-cause mortality in London. Eur Heart J 36(39):2653–2661. https://doi.org/10.1093/eurheartj/ehv216
Halperin D (2014) Environmental noise and sleep disturbances: a threat to health? Sleep Sci 7(4):209–212. https://doi.org/10.1016/j.slsci.2014.11.003
Hamad K, Ali Khalil M, Shanableh A (2017) Modeling roadway traffic noise in a hot climate using artificial neural networks. Transp Res Part D: Transp Environ 53:161–177. https://doi.org/10.1016/j.trd.2017.04.014
Hwang C-L, Yoon K (1981) Multiple attribute decision making. Lecture notes in economics and mathematical systems, vol Vol. 186. Springer Berlin Heidelberg, Heidelberg. https://doi.org/10.1007/978-3-642-48318-9
ISO 1996-1, Acoustics—description, measurement and assessment of environmental noise—part 1: basic quantities and assessment procedures; 2003.
Jakovljević B, Belojević G, Paunović K, Stojanov V (2006) Road traffic noise and sleep disturbances in an urban population: cross-sectional study. Croat Med J 47(1):125–133. https://www.ncbi.nlm.nih.gov/pubmed/16489705%0Ahttps://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=PMC2080382. Accessed 28 Aug 2020
Johnson DR, Saunders EG (1968) The evaluation of noise from freely flowing road traffic. J Sound Vib 7(2):287–309. https://doi.org/10.1016/0022-460X(68)90273-3
Kalaiselvi R, Ramachandraiah A (2016) Honking noise corrections for traffic noise prediction models in heterogeneous traffic conditions like India. Appl Acoust 111:25–38. https://doi.org/10.1016/j.apacoust.2016.04.003
Kephalopoulos S, Paviotti M, Anfosso-Lédée F, Van Maercke D, Shilton S, Jones N (2014) Advances in the development of common noise assessment methods in Europe: the CNOSSOS-EU framework for strategic environmental noise mapping. Sci Total Environ 482–483(1):400–410. https://doi.org/10.1016/j.scitotenv.2014.02.031
Kumar K, Katiyar VK, Parida M, Rawat K (2011) Mathematical modeling of road traffic noise prediction. Int J of Appl Math and Mech 7(4):21–28
Kumar P, Nigam SP, Kumar N (2014) Vehicular traffic noise modeling using artificial neural network approach. Transp Res C Emerg Technol 40:111–122. https://doi.org/10.1016/j.trc.2014.01.006
Lam WHK, Tam ML (1998) Reliability analysis of traffic noise estimates in Hong Kong. Transp Res Part D: Transp Environ 3(4):239–248. https://doi.org/10.1016/S1361-9209(98)00002-9
Lercher P (1996) Environmental noise and health: an integrated research perspective. Environ Int 22(1):117–129. https://doi.org/10.1016/0160-4120(95)00109-3
Li B, Tao S, Dawson RW, Cao J, Lam K (2002) A GIS based road traffic noise prediction model. Appl Acoust 63(6):679–691. https://doi.org/10.1016/S0003-682X(01)00066-4
Mette S, Zorana JA, Rikke B, Nordsborg Thomas B, Anne T, Kim O, Ole R-N (2013) Long-term exposure to road traffic noise and incident diabetes: a cohort study. Environ Health Perspect 121(217):217–223. https://doi.org/10.1289/ehp.1205503
Munzel T, Gori T, Babisch W, Basner M (2014) Cardiovascular effects of environmental noise exposure. Eur Heart J 35(13):829–836. https://doi.org/10.1093/eurheartj/ehu030
Munzel T, Schmidt FP, Steven S, Herzog J, Daiber A, Sørensen M (2018) Environmental noise and the cardiovascular system. J Am Coll Cardiol 71(6):688–697. https://doi.org/10.1016/j.jacc.2017.12.015
Nicol F, Wilson M (2004) The effect of street dimensions and traffic density on the noise level and natural ventilation potential in urban canyons. Energy and Build 36(5):423–434. https://doi.org/10.1016/j.enbuild.2004.01.051
Okokon EO, Yli-Tuomi T, Turunen AW, Tiittanen P, Juutilainen J, Lanki T (2018) Traffic noise, noise annoyance and psychotropic medication use. Environ Int 119(July):287–294. https://doi.org/10.1016/j.envint.2018.06.034
Ouis D (2001) Annoyance from road traffic noise: a review. J Environ Psychol 21(1):101–120. https://doi.org/10.1006/jevp.2000.0187
Pamanikabud P, Tansatcha M (2003) Geographical information system for traffic noise analysis and forecasting with the appearance of barriers. Environ Model Softw 18(10):959–973. https://doi.org/10.1016/S1364-8152(03)00097-5
Parbat DK, Nagarnaik PB (2008) Assessment and ANN modeling of noise levels at major road intersections in an Indian intermediate city. J Res Sci, Comput Eng 4(3). https://doi.org/10.3860/jrsce.v4i3.632
Paunovic K, Belojević G (2014) Burden of myocardial infarction attributable to road-traffic noise: a pilot study in Belgrade. Noise and Health 16(73):374–379. https://doi.org/10.4103/1463-1741.144415
Prabhakaran RTD, Babu BJ, Agrawal VP (2006) Structural modeling and analysis of composite product system: a graph theoretic approach. J Compos Mater 40(22):1987–2007. https://doi.org/10.1177/0021998306061318
Quinlan JR (1986) Induction of decision trees. Mach Learn 1(1):81–106. https://doi.org/10.1007/BF00116251
Radhiah Bachok KS, Kadar Hamsa AA, bin Mohamed MZ, Ibrahim M (2017) A theoretical overview of road hump effects on traffic noise in improving residential well-being. Transp Res Procedia 25:3383–3397. https://doi.org/10.1016/j.trpro.2017.05.224
Rahmani S, Mousavi SM, Kamali MJ (2011) Modeling of road-traffic noise with the use of genetic algorithm. Appl Soft Comput 11(1):1008–1013. https://doi.org/10.1016/j.asoc.2010.01.022
Rajakumara HN, Mahalinge Gowda RM (2009) Road traffic noise prediction model under interrupted traffic flow condition. Environ Model Assess 14(2):251–257. https://doi.org/10.1007/s10666-008-9138-6
Ratha D, Agrawal VP (2015) A digraph permanent approach to evaluation and analysis of integrated watershed management system. J Hydrol 525:188–196. https://doi.org/10.1016/j.jhydrol.2015.03.046
Seidler A, Wagner M, Schubert M, Dröge P, Römer K, Pons-Kühnemann J, Swart E, Zeeb H, Hegewald J (2016) Aircraft, road and railway traffic noise as risk factors for heart failure and hypertensive heart disease—a case–control study based on secondary data. Int J Hyg Environ Health 219(8):749–758. https://doi.org/10.1016/j.ijheh.2016.09.012
Selander J, Nilsson ME, Bluhm G, Rosenlund M, Lindqvist M, Nise G, Pershagen G (2009) Long-term exposure to road traffic noise and myocardial infarction. Epidemiology 20(2):272–279. https://doi.org/10.1097/EDE.0b013e31819463bd
Sharma A, Bodhe G, Schimak G (2014) Development of a traffic noise prediction model for an urban environment. Noise and Health 16(68):63–67. https://doi.org/10.4103/1463-1741.127858
Singh D, Nigam SP, Agrawal VP, Kumar M (2016a) Vehicular traffic noise prediction using soft computing approach. J Environ Manag 183:59–66. https://doi.org/10.1016/j.jenvman.2016.08.053
Singh D, Nigam SP, Agrawal VP, Kumar M (2016b) Modelling and analysis of urban traffic noise system using algebraic graph theoretic approach. Acoustics Australia 44(2):249–261. https://doi.org/10.1007/s40857-016-0058-3
Sisman EE, Unver E (2011) Evaluation of traffic noise pollution in Corlu, Turkey. Sci Res Essays 6(14):3027–3033. https://doi.org/10.5897/SRE10.1122
Steele C (2001) A critical review of some traffic noise prediction models. Appl Acoust 62(3):271–287. https://doi.org/10.1016/S0003-682X(00)00030-X
StoIlova K, StoIlov T (1998) Traffic noise and traffic light control. Transp Res Part D: Transp Environ 3(6):399–417. https://doi.org/10.1016/S1361-9209(98)00017-0
Suksaard T, Sukasem P, Tabucanon SMM, Aoi I, Shirai K, Tanaka H (1999) Road traffic noise prediction model in Thailand. Appl Acoust 58(2):123–130. https://doi.org/10.1016/S0003-682X(98)00069-3
Tandel B, Macwan J, Ruparel PN (2011) Urban corridor noise pollution: a case study of Surat city, India. Ipcbee 12:144–148. https://ipcbee.com/vol12/28-C10015.pdf. Accessed 3 Sept 2020
Tang SK, Tong KK (2004) Estimating traffic noise for inclined roads with freely flowing traffic. Appl Acoust 65(2):171–181. https://doi.org/10.1016/j.apacoust.2003.08.001
Thakre C, Laxmi V, Vijay R, Killedar DJ, Kumar R (2020) Traffic noise prediction model of an Indian road: an increased scenario of vehicles and honking. Environ Sci Pollut Res Int 27(30):38311–38320. https://doi.org/10.1007/s11356-020-09923-6
Thorsson PJ, Ögren M (2005) Macroscopic modeling of urban traffic noise—influence of absorption and vehicle flow distribution. Appl Acoust 66(2):195–209. https://doi.org/10.1016/j.apacoust.2004.07.013
To WM, Ip RCW, Lam GCK, Yau CTH (2002) A multiple regression model for urban traffic noise in Hong Kong. J Acoust Soc Am 112(2):551–556. https://doi.org/10.1121/1.1494803
Vijay R, Kori C, Kumar M, Chakrabarti T, Gupta R (2014) Assessment of traffic noise on highway passing from urban agglomeration. Fluctuation and Noise Lett 13(04):1450031. https://doi.org/10.1142/S021947751450031X
Vijay R, Sharma A, Chakrabarti T, Gupta R (2015) Assessment of honking impact on traffic noise in urban traffic environment of Nagpur, India. J Environ Health Sci Eng 13(1):10. https://doi.org/10.1186/s40201-015-0164-4
Acknowledgements
The authors would like to thank the Department of Civil Engineering, NIT Srinagar, for providing the necessary logistics for conducting the study. We express a deep sense of gratitude to Mohammad Idrees Gilani for helping in data collection during harsh winters and the ongoing coronavirus (COVID-19) pandemic.
Author information
Authors and Affiliations
Contributions
TAG was associated with data collection, mathematical analysis work, and article preparation work. MSM was associated with the review and correction process. All the authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Responsible Editor: Philippe Garrigues
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gilani, T.A., Mir, M.S. Modelling road traffic Noise under heterogeneous traffic conditions using the graph-theoretic approach. Environ Sci Pollut Res 28, 36651–36668 (2021). https://doi.org/10.1007/s11356-021-13328-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11356-021-13328-4