
Abstract
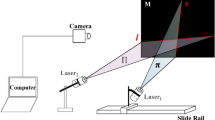
3D kinematic fields are measured using an original stereovision system composed of one infrared (IR) and one visible light camera. Global stereocorrelation (SC) is proposed to register pictures shot by both imaging systems. The stereo rig is calibrated by using a NURBS representation of the 3D target. The projection matrices are determined by an integrated approach. The effect of gray level and distortion corrections is assessed on the projection matrices. SC is performed once the matrices are calibrated to measure 3D displacements. Amplitudes varying from 0 to 800 μm are well captured for in-plane and out-of-plane motions. It is shown that when known rigid body translations are applied to the target, the calibration can be improved when its actual metrology is approximate. Applications are shown for two different setups for which the resolution of the IR camera has been modified.











Similar content being viewed by others


References
Amiable A, Chapuliot S, Contentinescu S, Fissolo A (2006) A computational lifetime prediction for a thermal shock experiment, part I: thermomechanical modeling and lifetime prediction. Fatigue Fract Eng Mater Struct 29:209–217
Fissolo A, Amiable S, Ancelet O, Mermaz F, Stelmaszyk JM, Constantinescu A, Robertson C, Vincent L, Maillot V, Bouchet F (2009) Crack initiation under thermal fatigue: an overview of CEA experience. Part I: thermal fatigue appears to be more damaging than uniaxial isothermal fatigue. Int J Fatigue 31(3):587–600
Fissolo A, Gourdin C, Ancelet O, Amiable S, Demassieux A, Chapuliot S, Haddar N, Mermaz F, Stelmaszyk JM, Constantinescu A, Vincent L, Maillot V (2009) Crack initiation under thermal fatigue: an overview of CEA experience: part II (of II): application of various criteria to biaxial thermal fatigue tests and a first proposal to improve the estimation of the thermal fatigue damage. Int J Fatigue 31(7):1196–1210
Vincent L, Poncelet M, Roux S, Hild F, Farcage D (2013) Experimental facility for high cycle thermal fatigue tests using laser shocks. Fatigue Des 2013 Int Conf Proc 66:669–675
Esnoul C, Vincent L, Poncelet M, Hild F, Roux S (2013) On the use of thermal and kinematic fields to identify strain amplitudes in cyclic laser pulses on AISI 304L strainless steel. Presented at the Photomechanics, Montpellier (France)
Charbal A, Vincent L, Hild F, Poncelet M, Dufour J-E, Roux S, Farcage D (2015) Characterization of temperature and strain fields during cyclic laser shocks. Quant Infrared Thermogr J. doi:10.1080/17686733.2015.1077544
Sutton MA, Orteu J-J, Schreier HW (2009) Image correlation for shape, motion and deformation measurements. Springer
Orteu J-J (2009) 3-D computer vision in experimental mechanics. Opt Meas 47(3–4):282–291
Hild F, Roux S (2012) Digital image correlation. In: Rastogi P, Hack E (eds) Optical methods for solid mechanics : a full-field approach. Wiley-VCH, Berlin
Prakash S, Lee PY, Robles-Kelly A (2007) Stereo techniques for 3D mapping of object surface temperatures. Quant Infrared Thermogr J 4(1):63–84
Rangel J, Soldan S, Kroll A (2014) 3D thermal imaging: fusion of thermography and depth cameras. Presented at the 12th international conference on quantitative infrared thermography. Bordeaux
Gaussorgues G (1999) La thermographie infrarouge, 4th ed. TEC&DOC
Orteu J-J, Rotrou Y, Sentenac T, Robert L (2008) An innovative method for 3-D shape, strain and temperature full-field measurement using a single type of camera: principle and preliminary results. Exp Mech 48(2):163–179
Chrysochoos A, Martin G (1989) Tensile test microcalorimetry for thermomechanical behaviour law analysis. Mater Sci Eng A 108:25–32
Favier D, Louche H, Schlosser P, Orgéas L, Vacher P, Debove L (2007) Homogeneous and heterogeneous deformation mechanisms in an austenitic polycrystalline Ti–50.8 at.% Ni thin tube under tension. Investigation via temperature and strain fields measurements. Acta Mater 55(16):5310–5322
Schlosser P, Louche H, Favier D, Orgéas L (2007) Image processing to estimate the heat sources related to phase transformations during tensile tests of NiTi tubes. Strain 43(3):260–271
Chrysochoos A, Berthel B, Latourte F, Galtier A, Pagano S, Wattrisse B (2008) Local energy analysis of high-cycle fatigue using digital image correlation and infrared thermography. J Strain Anal Eng Des 43(6):411–422
Chrysochoos A (2012) Thermomechanical analysis of the cyclic behavior of materials. IUTAM Symp Full-Field Meas Identif Solid Mech 4:15–26
Bodelot L, Sabatier L, Charkaluk E, Dufrénoy P (2009) Experimental setup for fully coupled kinematic and thermal measurements at the microstructure scale of an AISI 316 L steel. Mater Sci Eng A 501(1–2):52–60
Bodelot L, Charkaluk E, Sabatier L, Dufrénoy P (2011) Experimental study of heterogeneities in strain and temperature fields at the microstructural level of polycrystalline metals through fully-coupled full-field measurements by Digital Image Correlation and Infrared Thermography. Mech Mater 43(11):654–670
Seghir R, Charkaluk E, Dufrénoy P, Bodelot L (2010) Thermomechanical couplings in crystalline plasticity under fatigue loading. Fatigue 2010 2(1):1155–1164
Seghir R, Bodelot L, Charkaluk E, Dufrénoy P (2012) Numerical and experimental estimation of thermomechanical fields heterogeneity at the grain scale of 316 L stainless steel. Comput Mater Sci 53(1):464–473
Utz S, Soppa E, Christopher K, Schuler X, Silcher H (2014) Thermal and mechanical fatigue loading - Mechanisms of crack initiation and crack growth. Presented at the proceedings of the ASME 2014 pressure vessels & piping conference, PVP2014, Anaheim, California, USA. p. 10
Pottier T, Moutrille M-P, Le Cam J-B, Balandraud X, Grédiac M (2009) Study on the use of motion compensation techniques to determine heat sources. Application to large deformations on cracked rubber specimens. Exp Mech 49(4):561–574
Maynadier A, Poncelet M, Lavernhe-Taillard K, Roux S (2012) One-shot measurement of thermal and kinematic fields: InfraRed Image Correlation (IRIC). Exp Mech 52(3):241–255
Maynadier A, Poncelet M, Lavernhe-Taillard K, Roux S (213) One-shot thermal and kinematic field measurements: Infra-Red Image Correlation. In T. Proulx (Ed), Application of imaging techniques to mechanics of materials and structures, volume 4. Springer New York, 2013, pp. 243–250
Besnard G, Lagrange J-M, Hild F, Roux S, Voltz C (2010) Characterization of necking phenomena in high-speed experiments by using a single camera. EURASIP J Image Video Process 2010(1)
Szeliski R (2010) Computer vision: algorithms and applications. Springer
Dufour J-E, Beaubier B, Hild F, Roux S (2015) CAD-based displacement measurements with stereo-DIC: principle and first validations. Exp Mech 55(9):1657–1668
Piegl L, Tiller W (1997) The NURBS book, 2nd ed. Springer
Beaubier B, Dufour J-E, Hild F, Roux S, Lavernhe S, Lavernhe-Taillard K (2014) CAD-based calibration and shape measurement with stereoDIC. Exp Mech 54(3):329–341
Brown DC (1966) Decentering distortion of lenses. Photogramm Eng 32:444–462
Brown DC (1971) Close-range camera calibration. Photogramm Eng 37:855–866
Faugueras OD, Toscani G (1989) The calibration problem for stereoscopic vision. In: Casals A (ed) Sensor devices and systems for robotics, vol 52. Springer Berlin, Heidelberg, pp 195–213
Tsai RY (1987) Versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the shelf TV cameras and lenses. 323–344
Fraser CS (1997) Digital camera self-calibration. ISPRS J Photogramm Remote Sens 52(4):149–159
Fraser CS (1998) Automated processes in digital photogrammetric calibration, orientation, and triangulation. Digit Signal Process 8(4):277–283
Salvi J, Armangué X, Batlle J (2002) A comparative review of camera calibrating methods with accuracy evaluation. Pattern Recogn 35(7):1617–1635
Dufour J-E, Hild F, Roux S (2014) Integrated digital image correlation for the evaluation and correction of optical distortions. Opt Lasers Eng 56:121–133
Charbal A, Dufour J-E, Guery A, Hild F, Roux S, Vincent L, Poncelet M (2016) Integrated digital image correlation considering gray level and blur variations: application to distortion measurements of IR camera. Opt Lasers Eng 78:75–85
Crammond G, Boyd SW, Dulieu-Barton JM (2013) Speckle pattern quality assessment for digital image correlation. Opt Lasers Eng 51(12):1368–1378
Author information
Authors and Affiliations
Corresponding author
Appendix: Hybrid StereoRig at Higher Magnification
Appendix: Hybrid StereoRig at Higher Magnification
In order to have a better spatial resolution, a G1 lens may also be used for the IR camera (FLIR x6540sc, 640 × 512 pixels, pitch = 15 μm). The observed sample imposes the latter to be positioned normal to its surface (see Fig. 12) due to the low depth of field.

Hybrid stereo rig with the IR (with G1 lens) and visible light cameras where the motions are manually applied along 3 axes
The IR camera with a G1-lens is calibrated by following the same procedure as above. Since the previous 2D target does not provide sufficient contrast at room temperature, another one is used for the distortion corrections. A grid made of copper is deposited onto a black painted surface. The difference of emissivities (i.e., low for copper and high for the black paint) provides the required contrast. According to the manufacturer the pitch is 480 μm so that a simple grid is generated. The latter is used as a reference in the boxed region of interest (ROI) of Fig. 13.

(a) Reference (numerical) grid and (b) distorted image for the IR camera
The measured distortion fields are illustrated in Fig. 14. As observed with the visible light camera, they are vanishing in the image center and reach 1.5 pixel (or 22.5 μm) near the image borders. Even when expressed in pixels, these orders of magnitude are lower than those observed with the 50-mm lens, thereby proving that the quality of the G1-lens is higher than the 50-mm lens with the 12 mm extension ring.

Distortion fields (a) u x and (b) u y (expressed in pixel) for the IR camera with G1 lens
Once the pictures are corrected from the estimated lens distortions, it is possible to perform the next step, which consists of determining the projection matrices. When the gray levels are assumed to be conserved, the RMS gray level residual is as high as 25.1 % of the dynamic range. When a second order field (polynomial function of order 2) is considered and one blurring kernel it is reduced to 1.2 %. The quality of the residual after GLC corrections (see Fig. 15) is an additional proof of the quality of the estimates.

Gray level residual for the determination of the projection matrices (a) without and (b) with gray level and blur corrections (see main text)
Similar remarks and conclusions can be drawn from the present study, namely, the initial guess is closer to the matrices determined with GLC and that such corrections should be considered for a better estimation of the projection matrices.
The translational motions are performed by using a manual 3-axis stage. The prescribed and measured rigid body motions are listed in Table 5. In the present case, the integrated version (I-SC) is considered. According to the values reported in Table 5, the displacements are well captured. The difference in terms of displacement component is mostly due to misalignments between the target frame and that of the 3-axis stage.
Globally, the I-SC residuals normalized by the dynamic range of the reference pictures are smaller for the visible light camera (ranging from 0.6 to 1.2 %) when compared with the IR camera (0.6 to 2.1 %) when 3D displacements are measured. These low levels and the fact that the residual map is rather uniform (Fig. 16(b)) when compared to the case with no GLCs (Fig. 16(a)) show that the registration was successful.

Gray and digital level residuals for the visible light (a) and IR (b) cameras for displacement measurements
Rights and permissions
About this article

Cite this article
Charbal, A., Dufour, J.E., Hild, F. et al. Hybrid Stereocorrelation Using Infrared and Visible Light Cameras. Exp Mech 56, 845–860 (2016). https://doi.org/10.1007/s11340-016-0127-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-016-0127-4