
Abstract
Due to the roadside unit can not fully achieve seamless coverage and the dynamic change of network topology in vehicular networks, problems such as the interruption of vehicle service, poor stability of communication link, and high network delay will be caused. To solve these problems, this paper proposes a codirectional multilane adaptive message return (CMAMR) strategy based on edge computing. Firstly, we establish a CMAMR communication model. Then, according to the movement trajectory of the receiving node, we propose a single-hop and a multi-hop message return link strategy. The former combines the single-hop link quality and node location information to construct a node selection function to assist the head node in selecting an optimal forwarding node to form a single-hop message return link. The latter assists the RSU to select the optimal multi-hop message return link in the same lane by establishing a link adaptive quality evaluation function, thus improving the user’s quality of server. The simulation results show that the link network delay of the CMAMR strategy is 14.6%, 42.86%, and 38.47% lower than those of the random with forwarding progress (RFP), most forward with fixed radius (MFR), and traditional vehicle-to-infrastructure and vehicle-to-vehicle cooperative communication (TVCC) message return strategies, respectively; correspondingly, the link reliability is at least 9.13% higher for the CMAMR strategy.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The application of 5G communication technology to vehicular networks promotes rapid development of vehicular networks. Under the traditional vehicular networks’ architecture, messages need to pass from the core network to the base station before they can be transmitted back to the requesting vehicles. In this process, the network delay increases and the link reliability decreases [1]. Mobile edge computing (MEC) as a key technology of 5G vehicular networks, directly provides users with communication, computing, and caching services by deploying edge servers at roadside units (RSU), thus meeting the communication needs of high reliability and low delay in 5G vehicular networks [2,3,4]. However, in the actual vehicular networks, the deployment of RSU can not fully achieve the seamless coverage of wireless communication. Especially in the area not covered by RSU, the vehicle’s communication service is interrupted because the vehicle can not establish V2I communication link with RSU. In addition, due to the high speed of the vehicle and the dynamic change of the network topology, it may cause quality of service problems such as unstable message return communication link, increased delay and so on. Therefore, it is of great significance to study the message return strategy based on edge computing.
According to different distributions of the RSUs, there are multiple communication methods for establishing message return links. The vehicle can communicate through V2I (vehicle-to-infrastructure, V2I) and wait for RSU’s back data, or receive RSU’s back data through V2V (Vehicle-to-Vehicle, V2V) multi-hop communication links. Also, the vehicle can use V2I and V2V cooperative communication to receive the back data. For the message return strategy of the V2I communication mode. The researches on V2I communication focuse on energy saving, RSU selection and V2I link channel estimation [5, 6]. Furthermore, mainstream V2I communication strategies can also adopt optimization methods, such as resource allocation and power control to improve the service capability of RSUs in the network. Thus, improving the reliability of communication links and improving network delay.
However, V2I communication is only suitable for nodes driven within the RSU coverage area. When a vehicle leaves a given RSU coverage area, the auxiliary message return is mainly completed with the help of the V2V multi-hop model between vehicles [7,8,9,10,11]. V2V multi-hop communication link has the advantages of high transmission success rate and long communication distance [12]. However, when the hop number of links increases, data retransmission times increases, resulting in network latency increases and link reliability deteriorates. A great deal of effort is being made to provide new V2V multi-hop communication link design ideas. In fact, by considering only V2V communication or V2I communication, it might be difficult to comprehensively optimise the quality of service of the entire vehicular networks’ message return link. Using the V2I and V2V cooperative communication mode may therefore extend the scope of application. A great deal of effort is being made to study how to carry out efficient cooperative communication, and how to balance the relationship between link reliability and network delay [13,14,15,16].
In fact, although many studies have shown that the message return link performance of vehicle networking can be effectively improved through appropriate vehicle forwarding protocols or network optimization algorithms. However, as the vehicle is far away from the RSU communication range and the network topology changes dynamically, the number of forwarding nodes is increasing, which will greatly increase the network delay of the message return link and reduce the reliability of the link. Meanwhile, the current studies ignore the influence of the high-speed movement of vehicles and the change of relative position on communication links. Then most of them fail to combine the characteristics of vehicle movement and the change rule of channel state, and adaptively select multi-hop links according to different business service requirements. Thus, the quality of communication service cannot be improved in real time. Therefore, there are limitations in the optimization algorithm to improve the quality of the message return link only through the local analysis of network parameters and the selection of forwarding vehicles.
To solve these problems, this paper firstly establishes a codirectional multilane adaptive message return (CMAMR) communication model based on the MEC's V2I and V2V cooperative communication methods. Then, according to the movement trajectory of the receiving node, RSU uses the forwarding node selection function to select the most The best forwarding node forms the optimal single-hop message backhaul link with the receiving node; then, the edge server compares and calculates the link quality of the multi-hop message backhaul links in different directions based on the link adaptive quality evaluation function to assist RSU adaptively selects the best multi-hop message backhaul link and sends the message back to the receiving node. The main contributions of this paper are as follows:
-
1.
A single-hop message return link strategy was proposed, and the process of initial departure of the receiving node from the RSU communication range and establishment of a single-hop message return link was analyzed in detail. Considering parameters such as lane information of the receiving node and quality of the single-hop link, the node selection function was introduced to establish a high-quality single-hop message return link and improve its performance.
-
2.
A multi-hop message return link strategy is also proposed by constructing an adaptive quality evaluation function based on the link qualities of different message return links, and this function was used to assist the RSU to adaptively select high-quality message return links to establish continuous and stable multi-hop message return links with the receiving node to improve user experience.
-
3.
The simulation results showed that the CMAMR message return strategy could effectively improve downlink reliability and greatly reduce network delays compared with the RFP, MFR, and traditional V2I and V2V cooperative communication (TVCC) message return strategies. Meanwhile, it is verified that the strategy can be applied according to different types of services, adaptively select the message return link with the best reliability or network delay to meet specific high-reliability and low-latency communication service requirements.
The remainder of this manuscript is organized as follows. Section 3 describes the system model and explains the function of each device. Section 4 discusses the strategies of establishing the single-hop and multi-hop message return links. Section 5 presents the simulation results and discusses the impact of these results on the overall research. Section 6 discusses the significance of the research results and summarises the work.
2 Related work
On the Internet of vehicles (IoV), how to select RSUs to ensure that high-speed mobile vehicles can establish highly reliable communication links with RSUs, and carry out information transmission is a major challenge. Hoeft et al. [17] proposed an RSU selection algorithm. To avoid the RSU service efficiency reduction caused by the unbalanced number of on-board units (OBU) connected to the RSU, the conflict-free transmission probability was introduced. By reducing the probability of OBU access collisions, this algorithm can minimize the number of OBU connected to each RSU, thus achieving fair access of OBU to RSU's V2I communication services and improving the reliability of the return link. Kovalenko et al. [18] established a highly robust V2I system. In this system, the load balancer in each base station was equipped with an uncertain resource allocation strategy. By predicting the uncertainties in V2I communication and calculation, the resource allocation in each base station could be completed, thus improving the robustness of the V2I system. Ghorai et al. [19] proposed a RSU deployment strategy, which determined the initial location of the RSU through constrained Delaunay triangulation (CDT) method. Then, a multi-measure placement strategy was introduced to determine the final location of the RSU, and maximized the coverage of the RSU. Thus, the efficient V2I communication could be realized and the communication delay of V2I communication could be reduced. Senouci et al. [20] proposed a multi-hop clustering scheme based on V2I communication, in which vehicles directly obtained and shared the information needed to implement clustering algorithm through RSU, thereby expanding the scope of cluster coverage and reducing the number of clusters. Thus, the network overhead was further reduced and the link stability was improved. However, V2I communication has limitations with the increasing number of IoV application scenarios. For example, V2I communication services are interrupted when a vehicle is driving out of RSU communication coverage, which greatly reduces the communication experience of vehicle data transmission.
Different from V2I communication, through V2V multi-hop communication links, vehicles can communicate in areas not covered by RSU. In addition, V2V multi-hop communication can effectively reduce network delay and improve communication quality by sharing data nearby. Wang et al. [21] proposed a cooperative forwarding mechanism, which utilized vehicles in the opposite lane to realize the cooperative transmission of data between RSUs, to ensure that vehicles could still receive data when they left the coverage of RSU. Due to the large relative speed difference between vehicles in the opposite lane, the V2V multi-hop scheme based on the opposite lane is difficult to maintain long-term data communication. Therefore, considering vehicles in the same lane as the forwarding nodes, the establishment of V2V multi-hop message return links has become a research trend [8, 22]. In the design of the V2V multi-hop forwarding strategies, the correct selection of the forwarding vehicles is key to ensuring the performance of the multi-hop links [23, 24]. Suthaputchakun et al. [25] proposed a trinary partition black-burst-based broadcast protocol (3P3B-DTN) multi-hop message return strategy. The vehicle that receives the forwarding request selected the vehicle farthest from the vehicle within the V2V communication range each time to establish the multi-hop link. Thus, the number of forwarding vehicles in the link could be reduced to the greatest extent, the network overhead could be reduced and the link reliability could be improved. Farooq et al. [26] proposed a most-forward-with-fixed-radius (MFR) message return strategy. Each time the node receiving the forwarding request selects the node with fixed distance as the next hop forwarding node, and then established a multi-hop link. Thus, avoiding the problem of high retransmission probability caused by long single hop spacing. Moreover, at the cost of reducing the success rate of transmission per hop, the average throughput is further improved, and the end-to-end delay is reduced. On the contrary, to obtain the transfer success can receive, Farooq and ElSawy et al. [27] proposed a random-with-forward-progress (RFP) message return strategy. The strategy set a conservative probability value to limit the maximum hop distance. According to the specified probability, each time a vehicle received a forwarding request, any vehicle within the V2V communication range was selected as the next forwarding vehicle. And then established a multi-hop communication link. Data was transmitted between vehicles in a pre-coded way. Then the average throughput could be improved effectively, and the end-to-end delay could be reduced. However, only considering the establishment of a V2V link with the best delay or a V2V link with the best reliability has limitations. Based on comprehensive consideration of network delay and link reliability, Zhang et al. [28] proposed a strategy based on dynamic prediction. The vehicle receiving the forwarding request used dynamic information to predict the remaining forward delay and retransmission probability. Quickly selected the next hop to launch the vehicle and establish a multi-hop link, thereby reducing link delay and improving link reliability. However, no matter V2V multi-hop link or V2I communication link, a single communication mode often cannot meet the requirements of diversified scenarios of the IoV. Also, it cannot adapt to the network topology environment. Thus, it is difficult to effectively improve the quality of vehicle data communication.
With the in-depth research on multi-hop message return strategy of V2V and V2I cooperative communication can better improve vehicle communication quality. Nguyen et al. [29] proposed traditional V2I and V2V cooperative communication (TVCC) message return strategy. When the forwarding vehicle drove in the uncovered area between two consecutive RSUs, the leading vehicle searched for the vehicle farthest from itself each time as the forwarding vehicle. And then established a multi-hop link for V2I and V2V cooperative communication to receive data from RSUs.Therefore, it could meet the continuous communication service of vehicles, reduce the times of service interruption, and improve the average throughput. Osman et al. [30]compared the link quality of the V2V and V2I cooperative transmission strategy and the link quality of the V2V and V2I non-cooperative transmission strategy based on different vehicle network environments. The simulation results show that as the distance between the vehicle and the RSU increases, the link reliability of the V2I and V2V cooperative communication mode is much higher than the link reliability of the direct V2V communication and the direct V2I communication mode. Huang et al. [31] proposed a V2V and V2I cooperative communication strategy that limited the number of forwarding hops. The RSU traversed all vehicles in the lane and predicted all potential multi-hop links, and then based on the average session time and average path life of the link, calculated a reasonable forwarding hop number k. Then the RSU selected a multi-hop link with several forwarding hops lower than or equal to k hops to establish a multi-hop link for V2V and V2I cooperative communication, thereby limiting the number of forwarding hops on the link and improving link quality. Since the multi-hop link will inevitably increase when the vehicle leaves the RSU communication range, it is difficult to maintain a long-term high-quality multi-hop link only through the limit of the number of hops. Therefore, the increase in the number of hops needs to be considered comprehensively. The number of packet retransmissions increases, which in turn causes flooding, OBU access conflicts, broadcast storms, and other problems [32, 33]. Boukerche et al. [34] proposed an information forwarding architecture based on location information. In this architecture, the forwarding vehicle forwards to the area where the target vehicle might be located according to the known vehicle location information in the cache. Thus, this reduced the content search and request process, alleviated the information storm phenomenon and OBU access conflicts through directional multi-hop transmission, further reduced the network overhead in the backhaul link, and optimized the link communication quality. However, the above studies ignore the influence of vehicle movement attributes on collaborative communication link. And most of them are unable to adaptively adjust the selection scheme of multi-hop link based on the vehicle movement track, the delay and reliability requirements in different services. Therefore, it is difficult to further improve the service quality of vehicles.
This work proposes a codirectional multilane adaptive message return strategy based on edge computing. The strategy studies the influence of channel state and vehicle lane position on V2I communication link quality, and designs a single hop message return link selection scheme. Meanwhile, we further study the forward and backward multi-hop link path selection, and the influence of vehicle lane position on V2I and V2V cooperative multi-hop link quality. And then design a multi-hop message return link selection scheme. In addition, according to different types of services, the strategy can adaptively select the message return link with the best reliability or network delay to meet specific high-reliability and low-latency communication service requirements.
3 System model
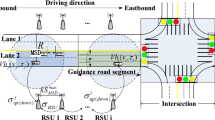
In this paper, a codirectional multilane adaptive message return strategy based on edge computing is proposed. First, the CMAMR communication model is constructed, as shown in Fig. 1. In the figure, the three lanes in the same direction are designated as the first, second, and third lanes from top to bottom, and the driving direction in these lanes is from left to right. There are three types of nodes in the model: the first is the head node marked as \({v}_{1}\), which represents the target user and needs to receive return information; the second is the forwarding node of the reverse multi-hop message return link marked as \(\left[{v}_{2}^{B},{v}_{3}^{B},...,{v}_{m}^{B}\right]\), which represents the multi-hop node selected in the direction of RSU1 when the vehicle exits RSU1 but has not reached RSU2, and the information is forwarded by Edge server1 and RSU1 through these nodes to form a reverse multi-hop message return link; the third is the forwarding node of the forward multi-hop message return link marked as \(\left[{v}_{2}^{F},{v}_{3}^{F},...,{v}_{n}^{F}\right]\), which indicates that when it is closer to RSU2, it selects the multi-hop node in the direction of RSU2 and forwards information via Edge server2 and RSU2 through these nodes to form a forward multi-hop message return link. The dashed circles in the figure represent the effective radii at which the nodes can communicate with the V2V system. It is assumed that all nodes are driven at the same speed in the same direction of travel without lane changes. It is assumed that the travel direction of the node is consistent with that of the lane, and the arrival rate of the node in a lane obeys the Poisson distribution, with the traffic density given as ρ.
Let RSU1 and RSU2 represent two adjacent roadside units, which are distributed on the same side of the road, as shown in Fig. 1. We configure MEC servers at RSU1 and RSU2, which are marked as Edge server1 and Edge server2, respectively [35]. Simultaneously, assuming that the effective communication radii of RSU1 and RSU2 are identical and equal to R, to facilitate representation, the coverage edges of RSU1 and RSU2 are expressed as edge1 and edge2, respectively, with D as the length that is neither covered by RSU1 nor RSU2 [36].

CMAMR communication system model, where the direction of the vehicle is from left to right
Taking RSU1 as the coordinate system origin, the driving direction of the node is the positive direction of the X-axis, and the direction from the first lane to the third lane is the positive direction of the Y-axis in the Cartesian coordinate system. The coordinate of RSU2 is then derived as (D + 2R,0).
In this paper, it is assumed that the C-V2X interface is used for communication between the nodes and RSU1, between the nodes and RSU2, as well as between adjacent nodes. Owing to the mobility of the nodes in the vehicle network, relatively low height of the transceiver antenna of the vehicle unit, and influence of the surrounding environment, it is difficult for the nodes to have line-of-sight propagation and signal fading. Therefore, when dividing the multi-hop message return channel between \({v}_{1}\) and RSU1 and RSU2, we need to consider factors, such as path loss and shadow fading. The mathematical expression of the communication channel model is based on the log-distance path loss model [37]. The path loss of any hop between the message return channel and a vehicle can be expressed as.
Where, \({\mathrm{P}}_{\mathrm{L}}(\mathrm{d\rm{^{\prime}}})\) represents the path loss of any hop between vehicle \({\mathrm{v}}_{1}\) and the multi-hop message return channels RSU1 and RSU2, \(\mathrm{d\rm{^{\prime}}}\) represents the Euclidean distance between neighboring nodes \({\mathrm{v}}_{\mathrm{m}}^{\mathrm{B}}\) and RSU1 (or \({\mathrm{v}}_{\mathrm{n}}^{\mathrm{B}}\) and RSU2), \(\uplambda\) is the path loss index, \(\upxi\) is the shadow fading coefficient with \(\xi \sim N\left( {0 \sigma ^{2} } \right)\), and \(\upsigma\) is the standard deviation of shadow fading.
4 CMAMR strategy
In the initial phase, when \({\mathrm{v}}_{1}\) is within the coverage of RSU1, V2I communication is performed directly with RSU1. Where, Edge server1 processes the request of \({\mathrm{v}}_{1}\), invokes local storage data, and RSU1 allocates the channels and transmits the return data of Edge server1 to \({\mathrm{v}}_{1}\) to form a return link. With movement, \({\mathrm{v}}_{1}\) will leave the coverage area of RSU1 but will have not yet entered the coverage area of RSU2. At this time, \({\mathrm{v}}_{1}\) cannot directly form message return links with RSU1 and RSU2. Where, the best multi-hop message return node must be selected through the CMAMR strategy to generate the message return link. This is the second stage, in which the nodes located in the coverage areas of RSU1 and RSU2 communicate with the RSUs via V2I, receive the return data from the Edge server, and forward the information to \({\mathrm{v}}_{1}\) through the multi-hop link to form the return link. The details of the CMAMR strategy are further described as follows.
4.1 Single-hop message return link strategy
It is assumed that \({v}_{1}\) always requires receiving the return message from the Edge server when in motion. When \({v}_{1}\) leaves the coverage area of RSU1 and has not yet entered the coverage area of RSU2, it cannot directly establish a message return link with the unit to receive the return message from the Edge server. Therefore, \({v}_{1}\) needs to establish a single-hop or multi-hop link to form the message return link with the RSU. First, the single-hop message return link is studied, where there is only one forwarding node in the link. When \({v}_{1}\) leaves the coverage area of RSU1, a reverse single-hop message return link is established, which is recorded as \(\left[{v}_{1},{v}_{2}^{B},RS{U}_{1}\right]\). When \({v}_{1}\) is about to enter the coverage area of RSU2, a forward single-hop message return link is established, which is recorded as \(\left[{v}_{1},{v}_{2}^{F},RS{U}_{2}\right]\). Therefore, the quality expression of the single-hop message return link is as follows:
where, \(Lq\) is the quality of the single-hop link, and \({P}_{Sl}\) is the probability of successful transmission between nodes. It is assumed that the probability of successful transmission in V2I communication between \({v}_{2}^{B}\) and RSU1 (or between \({v}_{2}^{F}\) and RSU2) is 100%, α is the trade-off factor, \({T}_{\omega }\) is the total delay of the single-hop message return link, and \({T}_{max}\) is the maximum tolerated delay of the network of the single-hop message return link.
The probability of successful single-hop transmission \({P}_{Sl}\) is expressed as follows:
Where, \(\gamma\) is the received signal-to-noise ratio (SNR) of the node, and \({\gamma }_{th}\) is the SNR for a given threshold. If the received SNR of the forwarding node is greater than the given threshold \({\gamma }_{th}\), the single-hop transmission is successful. \({P}_{tx}\) is the sum of node transmit power and antenna gain, \(d\) is the Euclidean distance between neighboring forwarding nodes, \({P}_{L}(d)\) is the path loss between \({v}_{1}\) and its neighboring forwarding nodes, \({N}_{0}\) is the power of white Gaussian noise. By expanding the shadow fading coefficient of \({P}_{L}\) and computing the variable upper limit integral of the probability function for a normal distribution, the final expression of \({P}_{Si}\) is obtained as follows:
where, \(\varphi \left(d\right)(dB)={P}_{tx}-68.1-{10}\lambda \mathit{lg}d-{\gamma }_{th}-{N}_{0}B\).
The relationship for the total delay of a single-hop message return link \({T}_{\omega }\) is as follows:
where \({T}_{p}\) is the message transmission delay between nodes and between the nodes and RSUs, and \({T}_{\omega s}\) is the waiting delay of the single-hop message return link, which is given as follows:
where \({T}_{Wd}\) is the waiting delay between neighboring nodes, and \({T}_{WD}\) is the waiting delay between \({v}_{2}^{B}\) and RSU1 (or \({v}_{2}^{F}\) and RSU2). Further, \({T}_{Wmax}\) is the maximum end-to-end delay, \(D\) is the Euclidean distance between \({v}_{2}^{B}\) and \(RS{U}_{1}\) (or \({v}_{2}^{F}\) and \(RS{U}_{2}\)), and r is the effective radius for the nodes to communicate via V2V.
According to (2), information that can be used for the forwarding node \(V\) can be expressed as follows:
where \(V\) includes the collection of all nodes within the communication range of \({v}_{1}\) that meet the link quality forwarding requirements, \({v}_{n}\) represents the n-th node in the communication range of\({v}_{1}\), and \({v}_{j}\) represents the j-th node in the communication range. \(L{q}^{{v}_{n}}\) represents the quality of the single-hop message return link, which consists of the n-th node in the communication range of \({v}_{1}\), \({v}_{1}\) and RSU1 (or RSU2). \(L{q}^{{v}_{j}}\) represents the quality of a single-hop message return link, which consists of the j-th node in the communication range of\({v}_{1}\), \({v}_{1 }\) and RSU1 (or RSU2). N represents the number of nodes in the communication range of\({v}_{1}\).
When \({v}_{1}\) is about to leave the range of RSU1 or enter the range of RSU2, different forwarding node selection schemes are available depending on the position of \({v}_{1}\) in the different lanes:
4.1.1 \({ \nu }_{1}\) is in the first lane
-
(a) When \({ \nu }_{1}\) is about to leave the RSU1 communication range
When \({ \nu }_{1}\) is about to leave the RSU1 communication range and is in the first lane, as shown in Fig. 2a, \({v}_{2}\) and \({v}_{3}\) represent nodes that can be used as forwarding nodes within the communication range of \({v}_{1}\), and the remaining nodes are represented as interference nodes. At this point, the forwarding node selection function is.
Where, \({V}_{k}\) represents the k-th node in the collection \(V\), \(L{q}^{{V}_{k}}\) represents the quality of a single-hop message return link, which consists of the \({v}_{1}\),\({V}_{k}\), and RSU1.

Link selection strategy when \({v}_{1}\) is about to leave RSU1 (or about to enter RSU2) and \({v}_{1}\) is in the first lane
In Fig. 2a, \({v}_{2}\) is selected as the forwarding node through the selection function to establish the single-hop message return link; the reason for this is that the position of RSU1 is fixed, and the return message is forwarded to \({v}_{1}\) through \({v}_{2}\) with less interference from other nodes and a higher transmission success rate. However, because the Euclidean distance between \({v}_{2}\) and RSU1 is the least, the waiting delay \({T}_{WD}\) is minimal, so the performance of the return link is better than those of the other nodes, and the link quality is maximal.
-
(b) When \({v}_{1}\) is about to enter the RSU2 communication range
When \({v}_{1}\) is about to enter the RSU2 communication range and is in the first lane, as shown in Fig. 2b, using the same forwarding node selection function (8) as in Fig. 2a, the best forwarding node is selected and the single-hop message return link is established. At this point, \(L{q}^{{V}_{k}}\) in the function represents the quality of the single-hop message return link, which consists of \({v}_{1}\), \({V}_{k}\), and RSU2.
4.1.2 \({{{ \nu }}}_{1}\) is in the second lane
-
(a) When \({v}_{1}\) is about to leave the RSU1 communication range
When \({v}_{1}\) is about to leave the RSU1 communication range and is in the second lane, as shown in Fig. 3a, \({v}_{2}\), \({v}_{3}\), and \({v}_{4}\) represent nodes that can be used as forwarding nodes within the communication range of \({v}_{1}\), and the remaining nodes are represented as interference nodes. At this point, the forwarding node selection function is.
where \({V}_{k}\) represents the k-th node in the set \(V\), and \({D}^{{V}_{k}}\) represents the Euclidean distance between \({V}_{k}\) and RSU1.
In Fig. 3a, \({v}_{2}\) is selected as the forwarding node through the selection function to establish the single-hop message return link; this is because the position of RSU1 is fixed, the waiting delay \({T}_{Wd}\) between the nodes when the return message is forwarded to \({v}_{1}\) through \({v}_{2}\), \({v}_{3}\), and \({v}_{4}\) is approximately equal, and the transmission success rate has little effect on the message return link; when \({v}_{2}\) is closest to RSU1, and the waiting delay \({T}_{WD}\) is minimal, the performance of the established message return link is higher at this time.
-
(b) When \({v}_{1}\) is about to enter the RSU2 communication range
When \({v}_{1}\) is about to enter the RSU2 communication range and is in the second lane, as shown in Fig. 3b, using the same forwarding node selection function (9) as in Fig. 3a, the best forwarding node is selected and the single-hop message return link is established. Where, \({D}^{{V}_{k}}\) in the function represents the Euclidean distance between \({V}_{k}\) and RSU2.

Link selection strategy when \({v}_{1}\) is about to leave RSU1 (or about to enter RSU2) and \({v}_{1}\) is in the second lane
4.1.3 \({{{v}}}_{1}\) is in the third lane
-
(a) When \({v}_{1}\) is about to leave the RSU1 communication range
When \({v}_{1}\) is about to leave the RSU1 communication range and is in the third lane, as shown in Fig. 4a, \({v}_{2}\) and \({v}_{3}\) represent nodes that can be used for forwarding within the communication range of \({v}_{1}\), and the remaining nodes are represented as interference nodes. At this point, the forwarding node selection function is.
where \({d}^{{V}_{k}}\) is the Euclidean distance between \({V}_{k}\) and \({v}_{1}\).
In Fig. 4a, \({v}_{3}\) is selected as the forwarding node through the selection function to establish the single-hop message return link. Because the position of RSU1 is fixed and \({v}_{1}\) is located in the third lane away from RSU1, when the return message is forwarded to \({v}_{1}\) through \({v}_{2}\) and \({v}_{3}\), the interference from other nodes is relatively large. When the forwarding node is closer to \({v}_{1}\), the interference from the other nodes is smaller, and the probability of successful information transmission in the link increases, so node \({v}_{3}\) that is nearest to \({v}_{1}\) is selected as the forwarding node to establish the single-hop message return link to effectively improve link performance.
-
(b) When \({v}_{1}\) is about to enter the RSU2 communication range
When \({v}_{1}\) is about to enter the RSU2 communication range and is in the third lane, as shown in Fig. 4b, using the same forwarding node selection function (10) as in Fig. 4a, the best forwarding node is selected and the single-hop message return link is established.

Link selection strategy when \({v}_{1}\) is about to leave RSU1 (or about to enter RSU2) and \({v}_{1}\) is in the third lane
4.2 Multi-hop message return link strategy
If \({v}_{1}\) moves out of the communication range of RSU1 and does not enter the coverage of RSU2, it is impossible to form a message return link through the single-hop node link. Therefore, it is necessary to form a multi-hop message return link between \({v}_{1}\) and RSU1 (or RSU2).
In the first step, multi-hop links need to obtain the set of nodes that can be used as forwarding nodes based on the quality of the communication links between nodes. The expression for the link quality between nodes is.
where \(Lq_{v2v}\) is the quality of the V2V communication links between nodes, and \(T_{\omega }^{v2v}\) is the total network delay of the V2V communication links between nodes, whose expression is given by.
where \(T_{\omega s}^{v2v}\) is the waiting delay of the V2V communication links between nodes.
According to (11), the collection of nodes that can be used as the forwarding node is obtained and expressed as follows:
where \(V\rm{^{\prime}}\) represents the collection of all nodes that meet the next-hop link quality forwarding requirements within the communication range of the forwarding node V2V, \(L{q}_{v2v}^{{v}_{n}}\) represents the quality of the communication link between the forwarding node and n-th node within its communication range. \(L{q}_{v2v}^{{v}_{j}}\) represents the quality of the communication link between the forwarding node and j-th node within its communication range. N' represents the number of nodes in the communication range of the forwarding node.
The second step is to select the multi-hop forwarding node in the set \(V\)' to establish the V2V multi-hop link. Therefore, the node selection function is established as.
where \({d}_{V2V}^{{V}_{k}^{^{\prime}}}\) represents the Euclidean distance between the forwarding node and \({V}_{k}^{^{\prime}}\) within its communication range.
In this stage, to limit the number of forwarding nodes in the communication link and avoid the problem of high link waiting delay and changes in the network topology caused by excess forwarding nodes, even while ensuring the quality of the single-hop link, the V2V multi-hop forwarding node selection strategy focuses on choosing nodes that are farther away from the current node as forwarding nodes. Therefore, according to the node selection function (14), the forward V2V multi-hop link is established as \(\left[{v}_{1},{v}_{2}^{F},{v}_{3}^{F},...,{v}_{n-1}^{F}\right]\). Further, the reverse V2V multi-hop link is established as \(\left[{v}_{1},{v}_{2}^{B},{v}_{3}^{B},...,{v}_{m-1}^{B}\right]\).
The third step is to establish the V2I link. At this stage, the forwarding node \({v}_{m-1}^{B}\) is about to leave RSU1 (or forwarding node \({v}_{m-1}^{F}\) is about to enter RSU2). Because the forwarding node is in a different lane, it is necessary to select the next-hop forwarding node \({v}_{m}^{B}\) (or \({v}_{m}^{F}\)) to guarantee the link quality of V2I communication between \({v}_{m}^{B}\) and RSU1 (or \({v}_{m}^{F}\) and RSU2) through node selection functions (8)–(10). Therefore, based on the forwarding nodes \({v}_{m-1}^{B}\) in different lanes, the next-hop forwarding node is selected using the corresponding function to form the communication link with RSU1 as \(\left[{v}_{m-1}^{B},{v}_{m}^{B},RS{U}_{1}\right]\); based on the forwarding nodes \({v}_{m-1}^{F}\) in different lanes, the next-hop forwarding node is selected via the corresponding function to form the communication link with RSU2 as \(\left[{v}_{m-1}^{F},{v}_{m}^{F},RS{U}_{2}\right]\).
In summary, combined with the two-stage link node selection, \({v}_{1}\) and RSU1 form a multi-hop message return link as \(\left[{v}_{1},{v}_{2}^{B},{v}_{3}^{B},...,{v}_{m-1}^{B},{v}_{m}^{B},RS{U}_{1}\right]\). \({v}_{1}\) and RSU2 also form a multi-hop message return link as \(\left[{v}_{1},{v}_{2}^{F},{v}_{3}^{F},...,{v}_{m-1}^{F},{v}_{m}^{F},RS{U}_{2}\right]\).
Owing to the mobility of the nodes, the number of forwarding nodes in the link constantly changes, and the network topology also changes dynamically in real time. Therefore, it is necessary to analyze the quality of different multi-hop message return links to ensure that RSU1 and RSU2 adaptively switch to the optimal link for message return communication according to the adaptive link quality evaluation function. First, the link quality expression for establishing the multi-hop message return link is as follows:
where \({P}_{s}\) represents the total link reliability of the multi-hop message return link, \({T}_{W}\) represents the total network delay of the multi-hop message return link, and \({N}_{sum}\) indicates the number of forwarding nodes in the link.
The total link reliability expression for the multi-hop message return link \({P}_{s}\) is.
where \({\gamma }_{{N}_{sum}}\) is the received SNR of the \({N}_{sum}\)-th forwarding node.
Because each forwarding node is independent of the others, the reliability of the total link is the product of the success probabilities of all single-hop transmissions. Further, owing to the communication advantages of V2I, the default transmission success rate of the last forwarding node for V2I communication within the RSU is 100%. By substituting (1) and (4) into (16), the final expression of total link reliability \({P}_{s}\) is.
where \({d}_{i}\) represents the Euclidean distance between the i-th forwarding node and the previous-hop forwarding node.
The expression for total network delay of the link \({T}_{W}\) is.
where \({T}_{p}\) is the message transmission delay between nodes, and i is the i-th forwarding node in the total link. \({T}_{W}^{i}\) is the waiting delay when the i-th forwarding node communicates with its V2V communication range; \({T}_{W}^{V2I}\) is the waiting delay of the V2I communication link between \({v}_{m}^{B}\) and RSU1 (or \({v}_{m}^{F}\) and RSU2).
The expression for the waiting delay \({T}_{W}^{i}\) when the i-th forwarding node communicates with its V2V communication range is as follows:
where di is the Euclidean distance between the i-th forwarding node and its V2V communication range.
The expression for the wait delay \({T}_{W}^{V2I}\) of the V2I communication link between \({v}_{m}^{B}\) and RSU1 (or \({v}_{m}^{F}\) and RSU2) is:
where \({d}_{V2I}\) is the Euclidean distance between \({v}_{m}^{B}\) and RSU1 (or \({v}_{m}^{F}\) and RSU2).
Inthe fourth step, based on the relationship between the quality of the message return multi-hop link where RSU1 and RSU2 are located, Edge server1 and Edge server2 choose the best multi-hop link for message return communication. Therefore, the link adaptive quality evaluation function for the message return multi-hop link is established as follows:
where, \(L{Q}_{B}\) is the quality of forming the multi-hop message return link between RSU1 and \({v}_{1}\), \(L{Q}_{F}\) is the link quality of forming the multi-hop message return link between RSU2 and \({v}_{1}\), and \(L{Q}_{summary}\) is the evaluation function for link quality. When \(L{Q}_{summary}\) is less than 1, it is observed that the quality of the message return link where the RSU2 is located is higher, hence verifying that \(L{Q}_{F}\) is true, and RSU2 forwards the return information to \({v}_{1}\) via the \(\left[{v}_{1},{v}_{2}^{F},{v}_{3}^{F},...,{v}_{m-1}^{F},{v}_{m}^{F},RS{U}_{2}\right]\) multi-hop link. When \(L{Q}_{summary}\) is greater than 1, it is observed that the quality of the message return link where the RSU1 is located is higher, so it is determined that the \(L{Q}_{B}\) is true, and the RSU1 forwards the message return information to \({v}_{1}\) through the \(\left[RS{U}_{1},{v}_{m}^{B},{v}_{m-1}^{B}...,{v}_{3}^{B},{v}_{2}^{B},{v}_{1}\right]\) multi-hop link. When \(L{Q}_{summary}\) is equal to 1, the qualities of the message return links where RSU1 and RSU2 are located are the same, so either \(L{Q}_{B}\) or \(L{Q}_{F}\) is determined to be true, and the multi-hop message return link in RSU1 and RSU2 is randomly selected to forward the return information to \({v}_{1}\).
In the third stage, when \({v}_{1}\) moves into the coverage area of RSU2, it communicates with RSU2 directly via V2I. In this process, Edge server2 processes the request of \({v}_{1}\), the local storage data is invoked, RSU2 allocates the channel, and the return data of Edge server2 is transmitted to \({v}_{1}\). At the same time, RSU2 forms a return link.
4.3 General flow of CMAMR strategy
In the process of moving from the coverage area of RSU1 to that of RSU2, \({v}_{1}\) must always receive the return data from the Edge server. The overall flow of the CMAMR strategy is shown in Fig. 5 and summarised as follows:
-
(1)
Start: initialize the parameters.
-
(2)
In the initial stage, RSU1 judges whether \({v}_{1}\) is within its coverage range.
-
(3)
If \({v}_{1}\) is within the coverage range, RSU1 communicates with \({v}_{1}\) directly to establish a V2I message return link.
-
(4)
If \({v}_{1}\) is not within the coverage range of RSU1, RSU2 determines whether \({v}_{1}\) is within its coverage range.
-
(5)
In the second stage, if RSU2 judges that \({v}_{1}\) has left the coverage area of RSU1 and has not yet entered the coverage area of the RSU2, then \({v}_{1}\) first sends a request to the surrounding node to establish the message return link.
-
(6)
Among the nodes in its V2V communication range, a new forwarding node is chosen in the message return link according to the node selection function.
-
(7)
After receiving the request to establish the message return link, the new forwarding node updates the node information for the message return link and establishes the V2V multi-hop link.
-
(8)
The new forwarding node determines whether it is within the coverage area of RSU1 or RSU2.
-
(9)
If the new forwarding node is not covered by RSU1 or RSU2, it continues to forward the message return link request and returns to step (6).
-
10)
If the new forwarding node is within the coverage area of RSU1 or RSU2, the forwarding node communicates directly with RSU1 (or RSU2), establishes a V2I communication link, and uploads the node information of the return link for the location and return request of \({v}_{1}\).
-
(11)
Then, \({v}_{1}\) combines the V2V multi-hop link and V2I link in the second stage to form different multi-hop message return links; Edge server1 (or Edge server2) selects the best multi-hop message return link based on the link adaptive quality evaluation function. Then, RSU1 (or RSU2) establishes communication with v1 through the best message return link, and the RSU within which the link is located forwards the return information to \({v}_{1}\).
-
(12)
In the third stage, if RSU2 judges that \({v}_{1}\) is within its coverage range, it communicates with \({v}_{1}\) directly and the V2I message return link is established.
-
(13)
The execution of CMAMR strategy ends upon successful link establishment.

CMAMR strategy implementation of general flow chart
5 Simulation and discussion
Simulations were performed using MATLAB for the traffic scenarios of the vehicular networks, to compare the link performances of RFP, MFR, and TVCC message return strategies. The effects of different traffic conditions and different weights of the link quality on network delay and link reliability were analyzed, and a series of simulations were carried out. The specific simulation parameters are summarised in Table 1.
For changes in the RSU uncovered distance D, the link network delays for different message return algorithms are simulated, as shown in Fig. 6. In the figure, the horizontal axis represents the uncovered distance D of the communication between the RSUs, and the vertical axis represents the network delay. It can be seen from the figure that when the value of RSU uncovered distance is in the interval of [0, 100], the network delay increases rapidly, and when the value of RSU uncovered distance is in the interval of [100, 1000], the network delay increases slowly. When the RSU uncovered distance is in the interval of [0, 100], the head node \({v}_{1}\) no longer communicates directly with RSU1, and the V2I and V2V single-hop message return links are established; the transmission and waiting delays are increased in the link, such that the network delay increases rapidly. When the RSU uncovered distance is in the interval of [100, 1000], the head node \({v}_{1}\) begins to establish V2I and V2V multi-hop message return links. With the increase in the uncovered distance, the number of forwarding nodes also slowly increases, resulting in slow increases in the transmission and waiting delays in the link, such that the rate of network delay decreases. Further, we see from the figure that the average network delay of the CMAMR strategy is 8.6 ms, while the average network delays of the RFP, MFR, and TVCC are 9.8, 12.2, and 11.8 ms, respectively. Compared with the latter, the overall network delays of the proposed algorithm are reduced by 14.6%, 42.86%, and 38.47%, respectively. This is because the distances between the nodes in the RFP and MFR strategies are relatively small, so the number of nodes increased for these two strategies when the RSU uncovered distance increased equally, and the network delay of the link increased rapidly. Furthermore, because the return link of the TVCC strategy is single, the communication link cannot adjust itself, which increases the link network delay with the increase in the uncovered distance. However, the CMAMR strategy adjusts the trade-off factor of the network delay according to different business requirements and selects the appropriate node spacing to establish the multi-hop message return link. Additionally, according to the adaptive link quality evaluation function, the RSU will select the link with lower network delay as the new link for message return communication to reduce the overall message return link network delay and ensure minimum link network delay. Therefore, it is proved that the network delay can be greatly reduced with the CMAMR strategy.

Network delay with different uncovered distance D
For changes in the RSU uncovered distance D, the link reliabilities for different message return algorithms were simulated, as shown in Fig. 7. In the figure, the horizontal axis represents the uncovered distance D of the communication between RSUs, and the vertical axis represents the reliability of the link. As seen from the figure, with the increase in the RSU uncovered distance, the link reliabilities of all the policies decrease because the number of nodes in the link increases along with the probability of service outage, resulting in a decline in link stability. It can be seen from the figure that the average link reliability of the CMAMR strategy is 80.78%, while those of the RFP, MFR, and TVCC policies are 64.60%, 74.02%, and 53.99% respectively. Compared with the latter, the overall link reliabilities of the proposed algorithm improved by 25.05%, 9.13%, and 49.62%, respectively. The reason for this is that each time the MFR strategy selected nodes with fixed spacing as forwarding nodes, while the RFP strategy randomly selected the forwarding nodes; further, the service outage probabilities of these two strategies are relatively low, so the link reliabilities decrease slowly with increase in RSU uncovered distance, leading to an increase in the number of nodes. The TVCC strategy selects the node with the maximum distance as the forwarding node each time, and the service outage probability is high. Once the RSU uncovered distance increases, the link stability decreases rapidly, and the link reliability decreases immediately. In the CMAMR strategy, according to the business requirements, by adjusting the trade-off factor of the link reliability, the node with the highest single-hop stability is selected as the forwarding node. The decline rate of link stability is slow, and the RSU will adapt in real time according to the link quality evaluation function to select the link with higher reliability among the different message return links as the new link for message return communication to improve reliability of the overall message return link. Therefore, it is proved that the CMAMR strategy can effectively improve the reliability of the link.

Link reliability with different uncovered distance D
Simulations were also performed to compare the influence of traffic density on the link qualities for different strategies when the uncovered communication distances are different, as shown in Fig. 8. In the figure, the horizontal axis represents the traffic density, and the vertical axis represents the link quality. As can be seen from the images (a), (b), (c), and (d) in Fig. 8, when the traffic density is fixed at 0.06, the uncovered distance between the RSUs are increased from 250 to 1000 m, and the link qualities for RFP, MFR, TVCC, and CMAMR policies decrease from [0.75, 0.80, 0.85, 0.90] to [0.63, 0.62, 0.72, 0.76] respectively. This is because the increase in the uncovered distance between the RSUs causes the number of forwarding nodes in the message return link to increase, and the service outage probability of the entire message return link also increases, leading to increase in network delay and decrease in link reliability, thereby decreasing the link quality. As can be seen from Fig. 8 (a), when the uncovered distance between the RSUs is fixed at 250 m and the traffic density increases from 0.06 to 0.14, the link qualities of the RFP, MFR, TVCC, and CMAMR policies increase from [0.75, 0.80, 0.85, 0.90] to [0.89, 0.85, 0.86, 0.97] respectively. The reason for this is that with the increase in traffic density, there are more forwarding nodes to choose from; the message return links of the RFP, MFR, and TVCC policies are thus more stable, and the link quality increases slowly. Similarly, for the CMAMR strategy, with the increase in traffic density, the number of optional forwarding nodes increases, and the link qualities for the different message return links increase. This strategy allows the selection of higher quality message return links for communication, to maintain higher link quality in the message return process. Therefore, it is proved that the CMAMR strategy can quickly adapt to traffic density and maintain high link quality.

Link qualities with different traffic density and uncovered distances D
When the trade-off factor α changes, the link reliability and network delay of the CMAMR strategy are simulated for different uncovered communication distances between the RSUs, as shown in Fig. 9. In Fig. 9a, the horizontal axis represents the trade-off factor α, and the vertical axis represents the link reliability. In Fig. 9b, the horizontal axis represents the trade-off factor α, and the vertical axis represents the network delay. When the uncovered distance is 0 m, the node always maintains V2I communication in the RSU, and the link reliability is 100% with no communication failure, so the network delay in the link is only 20 μs for single-hop transmission. As shown in Fig. 9a and b, when the uncovered distance between the RSUs is 1000 m, the corresponding link reliability decreases, and network delay decreases with increase in the trade-off factor α. The reason for this is that the increase in α indicates decreased demand for high link reliability for the message return service and increased demand for network low delay; thus, it is necessary for the message return service to establish a low delay message return link for communication, such that the RSU prioritizes the link return information with low network delay to optimize the user experience. Therefore, it is proved that the selection of different trade-off factors can help meet the link requirements of different message return services and that the simulation results are consistent with actual scenarios (Fig. 9).

Link reliability and network delay under with different trade-off factor α and uncovered distances D
6 Conclusion
In this paper, we propose a codirectional multilane adaptive message return (CMAMR) strategy based on edge computing, along with a node selection function derived according to the relationship between the node location and single-hop link quality. The quality of the single-hop message return link is effectively improved by selecting the best forwarding node. Moreover, an adaptive link quality evaluation function is constructed based on the qualities of different message return links, and the qualities of different multi-hop message return links are calculated via Edge server comparison, which assists the RSU in selecting the optimal message return link and establishing a high-quality multi-hop message return link with the head node. The simulation results show that the proposed CMAMR strategy can select the best message return link for communication according to different business requirements and can effectively improve user experience; in addition, when the network topology changes, compared with the RFP, MFR, and TVCC schemes, the reliability of the CMAMR strategy is increased by 49.62%, and the network delay is reduced by at least 14.6%. In the following research, we will be committed to building a more accurate multi-hop message return link communication model, and further research on 5G vehicular networks’ application scenarios with high reliability and low latency requirements such as smart travel, environmental awareness, and smart parking, thus improving users’ communication service quality.
References
Vázquez-Gallego, F., Vilalta, R., García, A., Mira, F., Vía, S., Muñoz, R., Alonso-Zarate, J., & Catalan-Cid, M. (2019). Demo: A Mobile Edge Computing-based Collision Avoidance System for Future Vehicular Networks. In IEEE INFOCOM 2019—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS).
Zhang, H., Wang, Z., & Liu, K. (2020). V2X Offloading and Resource Allocation in SDN-Assisted MEC-Based Vehicular Networks. China Communications, 17(5), 266–283.
Qayyum, T., Trabelsi, Z., Malik, A. W., & Hayawi, K. (2021). Multi-Level Resource Sharing Framework Using Collaborative Fog Environment for Smart Cities. IEEE ACCESS, 9, 21859–21869. https://doi.org/10.1109/ACCESS.2021.3054420
Iqbal, S., Noor, R. M., Malik, A. W., & Rahman, A. U. (2021). Blockchain-enabled adaptive-learning-based resource-sharing framework for IIoT environment. IEEE Internet of Things Journal, 8(19), 14746–14755. https://doi.org/10.1109/JIOT.2021.3071562
Ubiergo, G. A., & Jin, W.-L. (2016). Mobility and environment improvement of signalized networks through Vehicle-to-Infrastructure (V2I) communications. Transportation Research Part C-Emerging Technologies, 68, 70–82. https://doi.org/10.1016/j.trc.2016.03.010
Dey, K. C., Rayamajhi, A., Chowdhury, M., Bhavsar, P., & Martin, J. (2016). Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network—Performance evaluation. Transportation Research Part C-Emerging Technologies, 68, 168–184. https://doi.org/10.1016/j.trc.2016.03.008
Jin, W.-L., Recker, W. W., & Wang, X. B. (2016). Instantaneous multihop connectivity of one-dimensional vehicular ad hoc networks with general distributions of communication nodes. Transportation Research Part B-Methodological, 91, 159–177. https://doi.org/10.1016/j.trb.2016.05.011
Lim, S. H., Chia, Y. K., & Wynter, L. (2018). Accurate and cost-effective traffic information acquisition using adaptive sampling: Centralized and V2V schemes. Transportation Research Part C-Emerging Technologies, 94, 99–120. https://doi.org/10.1016/j.trc.2017.10.017
Meneguette, R. I., & Boukerche, A. (2017). SERVitES: An efficient search and allocation resource protocol based on V2V communication for vehicular cloud. Computer Networks, 123, 104–118. https://doi.org/10.1016/j.comnet.2017.05.014
Ramamoorthi, J. S., & Sangaiah, A. K. (2019). SCGR: Self-configuring greedy routing for minimizing routing interrupts in vehicular communication networks. Internet of Things, 8, 100108. https://doi.org/10.1016/j.iot.2019.100108
Wang, J., Kim, Y. H., He, X., & Peeta, S. (2018). Analytical model for information flow propagation wave under an information relay control strategy in a congested vehicle-to-vehicle communication environment. Transportation Research Part C-Emerging Technologies, 94, 1–18. https://doi.org/10.1016/j.trc.2017.08.009
el Bendali, A., Rahman, A. U., Malik, A. W., Khan, M. A., & Ravana, S. D. (2021). On-demand multi-hop forwarding for sustainable vehicular data transfer network. International Journal of Distributed Sensor Networks, 17(5), 15501477211015148. https://doi.org/10.1177/15501477211015147
Belmekki, B. E. Y., Hamza, A., & Escrig, B. (2019). Cooperative vehicular communications at intersections over Nakagami-m fading channels. Vehicular Communications, 19, Article 100165. https://doi.org/10.1016/j.vehcom.2019.100165
Chembe, C., Kunda, D., Ahmedy, I., Noor, R. M., Sabri, A. Q. M., & Ngadi, M. A. (2019). Infrastructure based spectrum sensing scheme in VANET using reinforcement learning. Vehicular Communications, 18, Article 100161. https://doi.org/10.1016/j.vehcom.2019.100161
Singh, P. K., Sharma, S., Nandi, S. K., & Nandi, S. (2019). Multipath TCP for V2I communication in SDN controlled small cell deployment of smart city. Vehicular Communications, 15, 1–15. https://doi.org/10.1016/j.vehcom.2018.11.002
Yaqub, M. A., Ahmed, S. H., & Kim, D. (2018). Asking neighbors a favor: Cooperative video retrieval using cellular networks in VANETs. Vehicular Communications, 12, 39–49. https://doi.org/10.1016/j.vehcom.2017.12.002
Hoeft, M., & Rak, J. (2016). How to provide fair service for V2I communications in VANETs? Ad Hoc Networks, 37, 283–294. https://doi.org/10.1016/j.adhoc.2015.08.024
Kovalenko, A., Hussain, R. F., Semiari, O., Salehi, M. A., & Ieee. (2019). Robust Resource Allocation Using Edge Computing for Vehicle to Infrastructure (V2I) Networks. In 2019 3rd IEEE International Conference on Fog and Edge Computing (ICFEC).
Ghorai, C., & Banerjee, I. (2018). A constrained Delaunay Triangulation based RSUs deployment strategy to cover a convex region with obstacles for maximizing communications probability between V2I. Vehicular Communications, 13, 89–103. https://doi.org/10.1016/j.vehcom.2018.07.002
Senouci, O., Aliouat, Z., & Harous, S. (2019). MCA-V2I: A Multi-hop Clustering Approach over Vehicle-to-Internet communication for improving VANETs performances. Future Generation Computer Systems-the International Journal of Escience, 96, 309–323. https://doi.org/10.1016/j.future.2019.02.024
Wang, Y., Zheng, J., & Mitton, N. (2016). Delivery delay analysis for roadside unit deployment in vehicular ad hoc networks with intermittent connectivity. IEEE Transactions on Vehicular Technology, 65(10), 8591–8602. https://doi.org/10.1109/tvt.2015.2506599
Xu, L. W., Huang, L. L., Cao, C. H., Wang, H., Li, Y., & Gulliver, T. A. (2019). Outage performance of mobile V2V cooperative networks. Physical Communication, 34, 295–300. https://doi.org/10.1016/j.phycom.2018.04.019
Cuka, M., Elmazi, D., Ikeda, M., Matsuo, K., & Barolli, L. (2019). IoT node selection in Opportunistic Networks: Implementation of fuzzy-based simulation systems and testbed. Internet of Things, 8, 100105. https://doi.org/10.1016/j.iot.2019.100105
Redhu, S., & Hegde, R. M. (2020). Optimal relay node selection in time-varying IoT networks using apriori contact pattern information. Ad Hoc Networks, 98, Article 102065. https://doi.org/10.1016/j.adhoc.2019.102065
Suthaputchakun, C., & Sun, Z. (2018). Multihop Broadcast Protocol in Intermittently Connected Vehicular Networks. IEEE Transactions on Aerospace and Electronic Systems, 54(2), 616–628. https://doi.org/10.1109/taes.2017.2761140
Farooq, M. J., ElSawy, H., Zhu, Q. Y., Alouini, M. S., & Ieee. (2017). Optimizing Mission Critical Data Dissemination in Massive IoT Networks. In 2017 15th International Symposium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks.
Farooq, M. J., ElSawy, H., & Alouini, M.-S. (2016). A stochastic geometry model for multi-hop highway vehicular communication. IEEE Transactions on Wireless Communications, 15(3), 2276–2291. https://doi.org/10.1109/twc.2015.2501817
Zhang, X. M., Yan, L., Chen, K. H., & Sung, D. K. (2020). Fast, Efficient broadcast schemes based on the prediction of dynamics in Vehicular Ad Hoc Networks. IEEE Transactions on Intelligent Transportation Systems, 21(2), 531–542. https://doi.org/10.1109/tits.2019.2896627
Bach Long, N., Ngo, D. T., Tran, N. H., Vu, H. L., & Ieee. (2019). Combining V2I with V2V Communications for Service Continuity in Vehicular Networks. In 2019 Ieee Intelligent Transportation Systems Conference (pp. 201–206).
Osman, R. A., Peng, X.-H., & Omar, M. A. (2019). Adaptive cooperative communications for enhancing QoS in vehicular networks. Phys Commun, 34, 285–294. https://doi.org/10.1016/j.phycom.2018.08.008
Huang, C.-M., Lin, S.-Y., & Wu, Z.-Y. (2020). The k-hop-limited V2V2I VANET data offloading using the mobile edge computing (MEC) mechanism. Vehicular Communications, 26, 100268. https://doi.org/10.1016/j.vehcom.2020.100268
Feukeu, E. A., & Zuva, T. (2017). Mitigation of a Broadcast Storm Problem in a Vehicular Ad Hoc Network (VANETs). In 2017 15th IEEE International Symposium on Parallel and Distributed Processing with Applications and 2017 16th IEEE International Conference on Ubiquitous Computing and Communications (pp. 1289–1295). https://doi.org/10.1109/ispa/iucc.2017.00197
Feukeu, E. A., & Zuva, T. (2017). Overcoming Broadcast Storm Problem in a Vehicular Network. In 13th International Conference on Signal-Image Technology and Internet-Based Systems (SITIS). https://doi.org/10.1109/sitis.2017.72
Boukerche, A., & Coutinho, R. W. L. (2019). LoICen: A novel location-based and information-centric architecture for content distribution in vehicular networks. Ad Hoc Networks, 93, Article 101899. https://doi.org/10.1016/j.adhoc.2019.101899
Zhou, S., Netalkar, P. P., Chang, Y., Xu, Y., Chao, J., & Ieee. (2018). The MEC-based Architecture Design for Low-latency and Fast Hand-off Vehicular Networking. In 2018 IEEE 88th Vehicular Technology Conference.
Hien Phuong, L., Panda, M., Le Hai, V., & Quoc Bao, V. (2017). Analysis of multi-hop probabilistic forwarding for vehicular safety applications on highways. IEEE Transactions on Mobile Computing, 16(4), 918–933. https://doi.org/10.1109/tmc.2016.2584055
Yang, M., Ai, B., He, R., Chen, L., Li, X., Huang, Z., Li, J., & Huang, C. (2018). Path Loss Analysis and Modeling for Vehicle-to-Vehicle Communications with Vehicle Obstructions. In 2018 10th International Conference on Wireless Communications and Signal Processing (WCSP).
Acknowledgements
This work was supported in part by the Sub Project of National Key Research and Development plan under Grant 2020YFC1511704, in part by the Scientific research level improvement project to promote the colleges connotation development of Beijing Information Science & Technology University under Grant 2020KYNH212 and 2021CGZH302, in part by the Beijing Science and Technology Project under Grant Z191100001419012, in part by the The National Natural Science Foundation of China under Grant 61971048.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, Y., Zhou, Y. An adaptive message return strategy for same direction multilane in vehicular networks. Wireless Netw 28, 2031–2046 (2022). https://doi.org/10.1007/s11276-022-02957-3
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11276-022-02957-3