
Abstract
Characterizing Europa’s subsurface ocean is essential for assessing Europa’s habitability. The suite of instruments on the Europa Clipper spacecraft will, among others, magnetically sound Europa’s interior by measuring the ocean’s induced magnetic field. This magnetic field is generated in response to the Jovian time-varying magnetic environment in which Europa is immersed. However, the dynamic magnetized plasma flow of the Jovian magnetosphere creates electrical currents that give rise to magnetic perturbations near Europa. These perturbations complicate the interpretation of the induction signal, and hence the characterization and inferences on potential habitability. Thus, characterization of the ocean by magnetic sounding requires an accurate characterization of the plasma as it flows across Europa.
We present the Plasma Instrument for Magnetic Sounding (PIMS), the instrument for the Europa Clipper mission that will measure the plasma contribution to the magnetic field perturbations sensed by the Europa Clipper Magnetometer. PIMS is composed of four Faraday Cup plasma spectrometers that use voltage-biased gridded apertures to dissect the space plasmas that they encounter. The instrument uses sensitive preamplifiers and processing electronics to measure the current that results when charged particles strike the instrument’s metal collector plates, thus enabling a measure of the plasma characteristics near Europa to produce a more accurate magnetic sounding of Europa’s subsurface ocean. PIMS consists of two sensors: one placed near the top of the Europa Clipper spacecraft and one near the bottom. Each sensor contains two Faraday Cups with a 90° full-width field-of-view. The sensors were specifically designed to withstand the Europa environment, measure both ions and electrons, and have two separate voltage ranges intended to analyze the magnetospheric and ionospheric environments, respectively. In this paper, we describe the scientific motivation for this experiment, the design considerations for the PIMS instrument, the details of the ground calibration, and other details pertinent to understanding the scientific data retrieved by PIMS.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction and Scientific Objectives
The primary goal of the Europa Clipper mission is to determine the habitability of Europa, including its subsurface liquid-water ocean. The strongest evidence for the existence of Europa’s ocean has come from the Galileo magnetometer measurements, which revealed a magnetic induction signature consistent with an electrically conducting layer beneath its ice shell (Kivelson et al. 1997, 2000). The Galileo measurements also suggest the presence of a magma ocean within Io (Khurana et al. 2011) and liquid-water ocean within Callisto (Schilling et al. 2007 and reviews by Saur et al. 2009; Jia et al. 2009; Khurana et al. 2011; Hartkorn and Saur 2017). This evidence was derived by comparing in situ magnetic field measurements with different induced magnetic field models. These models include different scenarios for the bulk composition and differentiation of Europa’s subsurface region and led to the conclusion that the most likely scenario to explain these measurements was a global conducting layer beneath Europa’s water-ice surface (Khurana et al. 1998). While the magnetic field signature could in principle be due to a solid metal-rich layer, other data on the differentiation and average mass density of Europa effectively rule out this possibility (Anderson et al. 1998). The most likely, and very scientifically exciting, scenario is that the conducting layer is a liquid ocean with a thickness between 100 and 170 km, with the conductivity generated by dissolved salts, such as sodium chloride and ammonia. Ammonia not only provides free ions to carry current but also acts as an anti-freeze allowing water to be present in liquid form at low temperatures.
Europa’s observed magnetic induction response is facilitated by the time varying Jovian magnetic environment in which Europa resides. Like the Earth, Jupiter’s magnetic axis is tilted with respect to its rotation axis (∼10°). Europa orbits in Jupiter’s geographic equatorial plane and so the magnetic equator rocks back and forth over Europa as Jupiter rotates. Therefore, Europa experiences field variations at the synodic period of Jupiter (∼11.2 h) and its harmonics. In addition, Europa’s orbit is not circular; thus, it also experiences variations in the magnetic field at the orbital period (∼85 h) as it gets closer to and farther away from Jupiter due to the 1/r3 falloff of Jupiter’s dipolar field. These periodic variations in the magnetic field drive electrical currents within Europa’s conductive ocean, which in turn produce a total induced magnetic moment that rotates roughly in Europa’s equatorial plane. This rotating induced magnetic moment, synchronized to Jupiter’s rotation and Europa’s orbital position, is associated with a dipolar magnetic field that can be sensed remotely with a magnetometer-equipped spacecraft like Europa Clipper. Figure 1 illustrates a snapshot in time of the theorized summation of all time-variable and stationary fields about Europa, as well as the assumed interior structure of Europa. The summation of these induced magnetic fields at Europa can be seen superposed on the nearly north-south oriented Jovian field lines.

Visual representation of the interaction of Jupiter’s magnetic field with Europa’s surface and interior. The green lines represent a summation of all time-variable and stationary (southward) fields. A possible interior configuration with a subsurface ocean is also shown
The characteristics of the induced field depend primarily on the ice thickness, ocean thickness, and conductivity. Conductivity is reliant on ocean composition, thus it provides clues about the ocean’s salinity and therefore about Europa’s habitability. However, the dynamic magnetized plasma flow within the Jovian magnetosphere perturbs the induction response from each of the moons, thereby obscuring accurate interpretation of the ocean properties and hence inferences on potential habitability. The plasma contributions to the magnetic field are expected to exceed the induction signal in all but a few portions of some flybys and are always at least 30% of the induction signal’s amplitude. The plasma contributions primarily vary according to the co-rotating Jovian plasma density and flow velocity. Accurate determination of the plasma contributions to the magnetic field is, therefore, imperative for the magnetic sounding science. The Europa Clipper spacecraft will be equipped with a series of fluxgate magnetometers to magnetically sound Europa’s interior (see Kivelson et al. 2023, this collection). It is also equipped with the plasma instrument for magnetic sounding (PIMS) instrument, composed of four Faraday Cups, to measure the characteristics of the Jovian magnetospheric and Europan ionospheric plasma. The PIMS measurements allow that the magnetic perturbing effects can accurately be backed out of the magnetometer data for accurate insight of interior properties and habitability assessment. Not only does PIMS provide correction for the magnetic induction dataset, but it also characterizes the variability in the Europan neutral source, measure the characteristics of the Europan ionosphere, possible plume signatures, and the magnetosphere to characterize their compositions, plasma sources, and to constrain the radiation evolution of surface materials. In this paper, we describe the instrument and its operation throughout the mission that allows it to meet these goals.
Magnetic Induction Sounding Technique
The technique of electromagnetically sounding planetary interiors was developed by Schuster (1886) and has been successfully used to probe the interiors of the Earth, the Moon, and several other planetary objects. Here we present a brief overview of the technique and how it is applied to the measurements of Europa Clipper.
The curled electric field created by a time-varying magnetic field is described by Faraday’s law of induction,
When a conductor is embedded in a time-varying field, eddy currents flow on its surface and act to shield the interior of the body from the electric field. The eddy currents produce a secondary induced field, which acts to reduce the primary field. The properties of the secondary field depend on the size, shape, location, and composition (conductivity) of the inducing material. The induction technique relies on the detection and characterization of the secondary field to constrain these properties.
In the absence of convection in the conductor, the electrodynamic equation
reduces to the diffusion equation
If we assume an oscillating magnetic field, \(\mathbf{B}\), of the form \(\mathbf{B}= \mathbf{B}_{\textbf{0}}e^{-i\omega t}\), then the solution of equation (3) for the top half (\(z> 0\)) of the conductor is given by
where \(S= (\omega \sigma \mu _{0}/2)^{-1/2}\) is the “skin depth” that is the distance over which the primary signal decays by one e-folding amount. \(S\) is small when the conductivity, \(\sigma \), is large and/or the frequency of the sounding signal (\(dB\)/\(dt\)) is high.
A wave with a period of 10 hours (close to the Jupiter rotation period) across a conductor with conductivity of 10 S/m (for example, strongly salty water) has a skin depth of 30 km. The low conductivities of pure water, ice, rocks, or an Earth-like ionosphere imply skin depths much larger than the diameter of Europa and can be ruled out as an explanation of the magnetic field observations. However, a salty subsurface ocean with conductivity similar to that of the Earth’s ocean and thickness of tens to hundreds of kilometers could produce the observed induction response.
The Europa Clipper spacecraft makes repeated flybys of Europa at different altitudes and at different phases (e.g., both Jupiter system III longitude and Europa’s orbital position) of the time-varying field in order to characterize Europa’s induced field. Observations of the variability of this field with the Jupiter 11-hour period and the Europan 85-hour orbital period is used to determine what ocean properties are consistent with the observations.
If Jupiter’s magnetosphere were devoid of plasma, then de-convolving the induced field from Europa’s interaction with the Jovian background field would be a trivial task. However, Jupiter’s magnetosphere is full of ionized plasma, mostly from its volcanic moon Io, but also from Europa, the other Jovian satellites, and from Jupiter itself. For a very simplistic picture of the Europa interaction the gradient of the particle pressure (\(\nabla p\)) is balanced by the magnetic tension (plasma current crossed with the magnetic field \(- \boldsymbol{j}\times \boldsymbol{B}\)) and gravity (in the form of the plasma mass density times the gravitational force \(-\ \rho \boldsymbol{g}\)). From this simplistic view the particle pressure is the crucial measurement for correcting the magnetic field measurements for the magnetic field generated by plasma currents. However, the plasma interaction is much more complicated than this simplistic view and will have contributions from various other factors (e.g., Bagenal et al. 2015; Rubin et al. 2015; Harris et al. 2021). For example, pickup and mass loading of the Jovian magnetospheric plasma from Europa’s ionosphere and atmosphere will play a crucial role in the interaction. From the PIMS measurements, it is possible to determine the flow of plasma and thus interpret plasma currents near Europa that drive induced magnetic fields that can obscure the induced fields from Europa’s subsurface ocean.
Plasma Influence on Magnetic Induction
The plasma modifies in-situ magnetic field measurements due mainly to 1) changes in the magnetic field occurring to maintain pressure balance in the plasma; 2) the response of the magnetic field to currents in the plasma; and 3) Europa’s plasma exosphere and atmosphere. Most of the plasma in Jupiter’s magnetosphere originates from its moons, especially the volcanic moon Io, which provides almost 1000 kg/s of sulfur and oxygen ions (e.g., Thomas et al. 2004; Bagenal and Dols 2020; Nerney and Bagenal 2020). These particles can be multiply charged and form sulfur oxides through collisions with water products. Since most of the magnetospheric ions are formed close to the equator, they remain quite equatorially confined (within about ±2 Jovian Radii (RJ) from Jupiter’s centrifugal equator, (Phipps and Bagenal 2021) and form what is often referred to as the magnetodisk. As a result, the rocking magnetic field also causes the heaviest part of the magnetodisk to move up and down across Europa.
It was not realized until recently that Europa is not only embedded in the extended Io torus but is also a significant source of plasma itself, providing ∼30 kg/s of mostly water group and hydrogen ions (Mauk et al. 2003; Smyth and Marconi 2006; Smith et al. 2019; Szalay et al. 2022). From Galileo measurements, it is known that Europa has an ionospheric plasma environment that extends from the surface up to at least 500 km (e.g., McGrath et al. 2004). While we currently do not have direct measurements of the Europa ionospheric composition it has been theorized to contain cold high-density ions, including CO2+, NH3+, NO+, and CH4+ (Johnson et al. 1998). Johnson et al. (1998) refer to this as Europa’s “ionosphere,” but it does not appear to exhibit traditional Chapman layers. The ionosphere appears to increase in density with decreasing altitude all the way to the moon’s surface (Kliore et al. 1997). While in situ observations of these ions do not exist below 500 km, detailed models and radio occultations of Europa’s ionosphere indicate that it is likely not spherically symmetric and will be complex and variable (Kliore et al. 1997; Johnson et al. 1998; Saur et al. 1998). However, the Europa Clipper spacecraft passes within 100 km of the surface on most flybys, with several significantly lower. Considering the level of uncertainty, it is essential to measure this plasma in order to ensure the magnetic field perturbation measurements are adequately accounting for the pressure generated by the ionospheric population, or at least to confirm when these ions are not impacting the field measurements.
The magnetodisk at Europa’s orbit (9.38 RJ average distance), sub-corotates at about 100 km/s (∼80% of Jupiter’s full rotation speed, Bagenal et al. 2015). Europa’s orbital speed is 13.74 km/s, and it takes about 30 seconds for plasma to flow across its ∼3000 km diameter. Even in the absence of Europa, currents flow in and around the magnetodisk and perturb Jupiter’s magnetic field due to magnetic field line draping.
To assess the plasma effects on magnetic field measurements near Europa, it is necessary to measure the corotating plasma flow to assess their magnetic perturbations. PIMS does this using a set of large field of view Faraday Cups. The Plasma Science (PLS) sensor on the Voyager spacecraft also utilized Faraday Cups (Bridge et al. 1977). Plasma data from the Voyager 1 encounter with Jupiter are shown in Fig. 2 (Bagenal et al. 2017; Bodisch et al. 2017; Dougherty et al. 2017). The top panel shows ion data, and the bottom panel shows electrons. To measure the bulk ion plasma properties accurately, it is necessary to measure ions, which contribute most to the pressure, in the range from tens of eV to at least 6 keV, as was done by the Voyager 1 Faraday Cups.

Voyager 1 data from the PLS instrument near Europa. The upper panel shows the ion spectrum while the bottom panel shows the electron spectrum. Both measurements are taken from the Voyager PLS side cup, which was generally in the direction of the magnetospheric flow during this encounter. This data is representative of the expected data for the PIMS instrument
2 PIMS Science Requirements
The selected Program Level (Level-1) Science Objectives that address Europa Clipper’s science objectives are listed here. Specifically, there are two Mission Level-1 Science Objectives that PIMS contributes to which are the following:
-
1)
Constrain the average thickness of the ice shell, and the average thickness and salinity of the ocean, each to +/− 50%.
-
2)
Characterize the composition and sources of volatiles, particulates, and plasma, to identify the signatures of non-ice materials including any carbon-containing compounds, in globally distributed regions of the atmosphere and local space environment.
PIMS directly contributes to these two science objectives by measuring the plasmas near Europa. Specifically, PIMS has the following Level-2 requirements that support the Level-1 science objectives:
-
1)
The plasma magnetic influence dataset shall include measurements of Jovian magnetospheric plasma and the Europa ionospheric plasma to characterize the influence of the plasma on the observed magnetic fields.
-
2)
The plasma composition dataset shall measure the energy per charge characteristics of the Europa ionosphere, possible plume ionosphere, and the magnetosphere to characterize their compositions and plasma sources.
The mission level requirements described above flow down to measurement (Level-2), payload (Level-3) and instrument (Level-4) requirements. At these levels, the selected PIMS detailed performance requirements are provided in Table 1. These requirements are based on previous measurements near Europa from Galileo (Bagenal et al. 2016) and Voyager (Bagenal et al. 2017; Bodisch et al. 2017; Dougherty et al. 2017).
3 The PIMS Instrument
PIMS uses four Faraday Cups (FCs; Nadir, Zenith, Ram, and Anti-Ram) in two sensors (PIMS Upper and PIMS Lower; Fig. 3) on opposite sides of the Europa Clipper spacecraft to measure the Jovian magnetospheric plasma and the Europa ionospheric plasma. The PIMS characteristics are given in Table 2. FCs measure the current produced on a segmented collector plate (there are three segments per collector plate called tridents) by charged particles with sufficient energy per charge (E/q) to pass through a modulated retarding grid placed at variable (AC) high voltage (HV), as shown in Fig. 4. In any one measurement, a HV waveform consisting of a DC level V plus a sine wave with amplitude \(\Delta \)V is applied to one of the modulator grids. Particles with E/q > V + \(\Delta \)V always make it through the modulator, producing a constant current. Particles with E/q < V + \(\Delta \)V are reflected out of the sensor. Particles with V \(-\ \Delta \)V < E/q < V + \(\Delta \)V produce an AC current and make up the primary measurement of PIMS. Electronics within the instrument amplify and digitize the current waveform from each collector plate, and then perform a synchronous detection to enhance the AC component of the current at the HV modulation frequency. The sum of the currents from all three collector plate tridents gives the particle flux, and the ratios of the currents on each of the tridents yield the flow angle of the plasma. The currents are measured with a very high Signal to Noise Ratio (SNR; noise levels on PIMS are ∼1−10 pA peak to peak) and represent the bulk properties of the plasma. The peak-to-peak current measurement corresponds to a measurement between the highest and lowest values in the current waveform produced by the plasma being modulated at the HV modulation frequency.

The PIMS sensors. The left sensor is shown without the red-tag remove before flight covers and with partial thermal blanketing (the thermal blanket sail that bridges the two Faraday cups is not shown). The right sensor is shown without thermal blanketing and with the red-tag hardware. These photos were taken prior to flight delivery for integration onto the Europa Clipper spacecraft in March of 2021

The Faraday Cup measurement technique. The left panel shows how the PIMS FC measures the energy of the incoming particles while the right panel describes how the plasma flow direction is measured using the segmented collector plate
The PIMS sensors are simple, inert metal plates that collect currents from ions and electrons. They contain no silicon or other material that would be degraded or damaged by ionizing radiation, making them ideal instruments for precise, stable, and sensitive plasma measurements in the Jovian system. A synchronous detection technique attenuates signals at all frequencies other than the oscillation frequency (320 Hz) of an applied HV waveform, making the instrument insensitive to noise sources such as ionization radiation, UV light, emission generated by other instruments, or slowly changing background signals, as those noise sources simply contribute to the DC measurement.
A full FC measurement cycle consists of stepping the voltage on the modulator from negative values to modulate electrons, up to positive values to modulate ions. The E/q range scanned by the instrument is set by the range of voltage V applied and can be configured during the mission. The energy per charge resolution of the instrument is determined by selecting the value of \(\Delta \)V. Simply changing the amplitude of the AC component of the HV waveform changes the FC energy per charge resolution on the fly. Note that this also affects how much current is being modulated – very fine resolution steps result in small currents and low SNRs, while large voltage swings produce larger currents but have the tradeoff of a higher noise background due to pickup from the HV grid onto the collector, and lower resolution. For Europa Clipper, we have optimized these HV sweep tables to attain the highest quality science results.
4 PIMS Performance Requirements
There are six primary performance characteristics that drive the PIMS design that are derived from the science requirements: acceptance angle, current density, angular resolution, energy per charge range, measurement cadence, and energy per charge resolution. These characteristics are captured in instrument requirements at Level 4 and detailed in Table 1. Detailed analysis was performed to determine the exact values for each requirement. Below is a brief description of why each of these characteristics is important to the measurement and some detail supporting the PIMS specific choices. The subsections below give details on these performance requirements and how they influenced the PIMS specific design, Sect. 6 details the actual PIMS performance and validation.
4.1 Acceptance Angle
The acceptance angle requirement defines the field of view (FOV) for the instrument and was selected to both produce suitable performance within each cup, but also to match with the trajectory and attitude constraints of the Europa Clipper spacecraft and mission design. The Europa Clipper spacecraft provides a stable platform from which to observe the magnetospheric and ionospheric plasmas. The spacecraft attitude changes for various observations throughout the mission. The acceptance angle is optimized to maintain the plasma flow direction within the FOV throughout. Simulations of the Europa Tour were performed using the notional spacecraft attitude and the PIMS FOVs and are shown in Fig. 5. As outlined below, the magnetospheric and ionospheric measurements present different constraints. The magnetospheric measurements require the Jovian plasma flow to be within the FOV, while the ionospheric measurements require the spacecraft ram direction to be captured during a flyby.

Simulation of the direction of the plasma flows into the four PIMS FCs during the Europa Clipper mission using the 21F31 trajectory (Europa Clipper trajectory features are further discussed by Buffington et al. 2017 and Bayer et al. 2018). The azimuth and elevation angles give the direction of the plasma flow with respect to the Europa Clipper spacecraft frame of reference. The points give the direction of the magnetospheric or ionospheric plasmas into the PIMS cups throughout the mission in the various instrument modes. The colors of the points give which cup the points go into and the mode that the instrument is in. With the PIMS configuration on Europa Clipper only 1.8% of the possible measurements fall outside of the PIMS FOV with most of those measurements taking place far from Europa
4.2 Current Density
The current density defines the minimum and maximum input currents to the FC. This parameter was determined through modeling of the instrument response to Jovian magnetospheric and Europa ionospheric environments using measurements from the Galileo and Voyager missions (Kliore et al. 1997; Bagenal et al. 2017; Bodisch et al. 2017; Dougherty et al. 2017). The instrument response is calculated using the approach outlined by Heelis and Hanson (1998) and was validated against Voyager PLS and Wind FC data. This requirement has ramifications on the aperture size and grid transparency, which together define the effective area (defined as the area of the limiting aperture times the combined grid transparency), as well as the electronics performance, and on-board data processing.
The PIMS design utilizes an 8.7 cm2 effective area per collector with three collectors per cup and collects sufficient current to measure all plasmas observed by the Galileo and Voyager missions. The effective area is calculated as the geometric opening of the limiting aperture (8.0 cm diameter circle or 50.3 cm2 area) times the transparency of the grids (7 × 91% transparent grids or 52% total transparency at normal incidence), which corresponds to 26.1 cm2 effective area total and 8.7 cm2 effective area per trident at normal incidence.
4.3 Angular Resolution
The angular resolution defines how well the instrument can measure the direction of the flow of the plasma. This measurement is crucial for obtaining the flow velocity of the plasma. In addition, because this planar instrument only measures the particle energy in the direction normal to the cup entrance, the angle is required to translate the measured energy to a proper velocity vector. The cup geometry, specifically the distance between the limiting aperture and the collector plate, plays a major role in the angular resolution of the instrument along with the electronics sensitivity and resolution. The measurement is be combined with the spacecraft ephemeris data to determine the absolute plasma flow direction for each case.
4.4 Energy per Charge Range
The energy per charge range defines maximum and minimum energies of ions and electrons that can be measured by the instrument. The energy per charge range must cover all ion species and plasma electrons expected in the Jovian magnetosphere and Europan ionosphere. The energy per charge range for the magnetospheric and ionospheric cases are different; for the magnetospheric measurement the plasma rapidly rotates with the Jovian magnetic field, producing a flow velocity of about 100 km/s, whereas for the ionospheric case, the plasma is stationary with Europa and is rammed into the instrument at the spacecraft velocity of ∼4 km/s. Energy per charge range has significant ramifications in the high voltage design of the system including maximum output levels and stand-off distances.
4.5 Measurement Cadence
The measurement cadence defines how frequently the complete energy per charge range of the instrument is measured. For the magnetosphere, this parameter was selected to ensure measurements are made at intervals much shorter than the fundamental timescales within the Jovian plasma, which is on the order minutes. The ionospheric measurement cadence is set such that several measurements can be obtained within every atmospheric scale height. The magnetospheric measurement cadence was selected to be 4 s for a full ion and electron measurement, while the ionospheric measurement cadence is 1 s. There is also a transition mode which interleaves the two measurement modes.
4.6 Energy per Charge Resolution
The energy per charge resolution defines the minimum granularity of the energy per charge versus current histogram output of the instrument. It determines the grid design and spacing as well as the grid voltage V selected during a sweep. This value has significant impact on how accurate the curve fit analysis is when the final data products are analyzed for composition. The driving case for PIMS energy per charge resolution is for ionospheric measurements when the spacecraft carries a significant charge with respect to plasma ground. To resolve ionospheric species within the energy per charge spectrogram, the energy per charge resolution must be 0.3 V or better for a spacecraft charged to −10 V.
4.7 Europa Clipper Specific Environmental Requirements
There are also several driving environmental requirements that must be met for the instrument to function properly on the Europa Clipper spacecraft and in the Jovian environment. The primary environmental requirements of concern for PIMS are vibration, shock, microphonics, thermal, radiation, magnetics, and spacecraft charging. The vibration requirements are defined by the launch environment, and the shock requirements are defined by the launch vehicle separation. These requirements drive the structural design of the FC as well as the specific grid configurations. Thermal requirements have two driving conditions. The hot driving case is when the spacecraft is at Venus with one FC facing the Sun while in a non-operational state (this case was dropped late in the PIMS development because it no longer applied following the adoption of the Mars-Earth Gravity Assist trajectory). The cold driving case is when the spacecraft is at Europa and all FCs are facing cold space. These requirements drive the materials and coatings selections within the cup as well as some geometric decisions to limit sun exposure.
The radiation environment at Europa is extreme compared to typical missions due to the large quantities of greater than 1 MeV electrons within Jupiter’s massive radiation belts. This has several ramifications within the FC design. Electrical and thermal insulators can develop a local charge that may affect the flow of plasma near the instrument. They may also charge enough to create an arc to some adjacent conductors and damage the material or electronics. This presents a unique situation for the HV insulators where they must both stand off the voltages within the cup but also bleed charge accumulated on the insulator. The radiation is extreme enough to modify the physical properties of exposed materials and cause degradation and potential failures of electronic parts.
The magnetic signature of the instrument must be minimized such that measurements of low-energy electrons are not altered by any magnetic fields. In addition, the Europa Clipper spacecraft is designed to minimize the magnetic sources in the PIMS field-of-view to below 250 nT. The PIMS requirement is self-imposed to be sure nothing in the instrument alters the direction of the plasma. This plays a significant role in the selections of materials and coatings throughout the entire instrument and on the placement of PIMS on the spacecraft.
Measurements of very small currents are susceptible to microphonics, which induce currents onto the collectors and cables prior to signal amplification. These tiny micro-vibrations from external mechanical sources create erroneous currents in the signal path via the EMF from moving charged materials (such as the grids and cables). There are several sources of microphonics throughout the spacecraft including the reaction wheels, cryocoolers, other instrument motion stages, and the thermal loop pumps. Microphonics can affect the instrument performance as any vibrations induced near the science modulation frequency can produce signals on the collector plate resulting in higher effective noise floors. These requirements affect the mechanical interfaces, grid spacing and voltages near the collector, and the general PIMS accommodation on the spacecraft.
Spacecraft charging can have a detrimental effect on the measurement of low-energy plasmas. In the Jovian environment, the Europa Clipper spacecraft will charge due to the complex interplay between various charging sources such as solar photons and ambient plasma electrons. When the spacecraft is charged positively, PIMS is unable to measure ions with energies below the spacecraft potential and electrons are accelerated into the instrument. Negative spacecraft potentials result in the inability to measure low-energy electrons, and ions are accelerated into the instrument. While this is a more global issue to be resolved by the Europa Clipper mission, PIMS drives the requirements to reduce the spacecraft potential. In addition, the Faraday Cup design is affected because the instrument energy per charge resolution needed for ionospheric measurements are directly influenced by the charging.
5 PIMS Detailed Design
In this section, we describe in some detail the design, hardware, and inner workings of the PIMS instrument. The PIMS instrument comprises two identical sensors: one mounted near the top of the Europa Clipper spacecraft containing the ram- and zenith-oriented FCs, and the other mounted near the bottom of the spacecraft containing the nadir- and anti-ram-oriented FCs. Both sensors are self-contained and can operate independently of each other.
The PIMS mechanical assembly is shown in Fig. 6. PIMS upper and PIMS lower sensors are mechanically identical. The FCs are mounted on orthogonal faces of a mechanical assembly that consists of a six-sided, machined-aluminum chassis. The FC electronics, consisting of the HVPS, Common Electronics Unit (CEU) and preamplifier boards, are located within a separate thick-walled enclosure that mounts within the chassis. The chassis has multiple covers allowing access for electronics-to-FC interconnects, which includes cables for the High-Voltage (HV) grid, Low-Voltage (LV) grid, Suppressor Voltage (SV) grid, and collectors.

Depiction of the PIMS mechanical assembly showing details on the instrument size, each of the electronics boards, the electronics bank, and where each piece resides in the instrument
The PIMS mechanical design implementation uses a box-within-a-box which offers protection from the extreme radiation environment and increases the thermal isolation of electronics from the cold-biased FCs. All electronics are shielded from the external multiple-Gigarad environment to a few hundred kilorad levels behind the thick-walled electronics box, while interconnects and ancillary components such as wires, cables, rigid-flex circuit boards, heaters, and temperature sensors located between the electronics and FCs are shielded to low Megarad levels behind the thin-walled instrument chassis. This shielding design allows the use of most standard materials and processes.
Providing radiation shielding for PIMS electronics is a significant mass driver, so every effort was made to minimize the electronics volume and provide efficient packaging. The design leverages experience gained from APL’s prior work in high radiation environments such as Juno/JEDI Instrument (Mauk et al. 2017) and Van Allen Probes (Mauk et al. 2016). Typical weak spots in radiation shielding occur at connector interfaces. PIMS reduced the number of interfaces and utilized rigid-flex boards to carry all spacecraft power and data signals via small slots in the thick-walled chassis. The result is an electronics volume measuring roughly 10 cm x 10 cm x 10 cm with an efficient radiation shield.
5.1 Faraday Cup
The sensor is split into three assemblies: collector assembly, modulator assembly, and baffle. The baffle assembly sits on top of the FC. Its purpose is to limit the FOV of the instrument. Some previous FCs have not utilized a baffle, however for PIMS it was important to clearly define the field of view such that potential sources of noise and unintended signals were not given a clear pathway into the PIMS collectors.
5.2 Modulator Assembly
The modulator is composed of multiple ground grids, a High Voltage (HV) grid, a Low Voltage (LV) grid, and the collector housing (Fig. 7). The potentials within the FC are carried by an array of monolithic etched planar grids shown in Fig. 8. There are several performance-related parameters that are affected by the grid design; the most crucial of which are the energy per charge resolution and transparency of the instrument. As a particle traverses an open cell of the grid, it is affected by the potential applied on the grid. The voltage at the center of the grid cell is lower than the voltage applied to the grid, while voltages closer to the metal grid are closer in value to the applied voltage. This results in a range of particle energies being rejected by the grid, which in turn produces an uncertainty in the measured energy.

The geometry of the PIMS Faraday Cups showing the full dimensions of the cup stack along with crucial angles. The four boxes at the bottom of the figure give the surface finishes, materials, grid geometry, and cup field-of-view parameters. Note that the field of regard referenced here is the same as the keep out zone referenced elsewhere

The PIMS monolithic etched tungsten grids. The left grid is an example of the grids used in the modulator section; this specific grid is the high-voltage grid. The grid on the right is an example of the smaller grid used in the collector section. The PIMS grids in the have a wire thickness of 0.050 mm and a pitch of 1.07 mm giving a transparency of 91%
Finer grids (smaller spacing) produce better energy per charge resolution but restrict the transparency of the cup, while coarser grids have reduced energy per charge resolution but greater transparency. When considering these requirements together, along with the mechanical and fabrication constraints, the solution space is restricted to grids with transparencies of 91% each, which can produce better than 5% energy per charge resolution and with the seven grids results in a 52% overall transmission. The spacing between each individual grid is primarily determined by the high-voltage standoff required, but also affects the energy per charge resolution of the instrument. Increasing the distance between grids results in higher energy per charge resolution as the electric field becomes more uniform in the space between the grids. Several cases were considered in the development of PIMS and are detailed in Grey et al. (2018).
A high voltage standoff rule of 1 mm per kilovolt was enforced to ensure no discharges along surfaces or across vacuum gaps from the HV (or LV) grid to the nearby ground grids. Insulating standoffs isolate the HV grid from ground using a specialty material called Semitron 520HR that acts as an insulator but still bleeds off charge ensuring that no extended buildup of possibly hazardous potentials occurs inside of PIMS. The 80 mm diameter limiting aperture at the base of the modulator assembly establishes the primary aperture for plasma entering the FC. The PIMS modulator design also ensures that all the insulators are shielded from the space environment to further reduce the possibility for insulator charging.
5.3 Collector Assembly
The collector is composed of a ground grid, a suppressor voltage grid, the collector plates, and the collector housing. The collector plates are divided into 3 × 120° trident sections. A trident (as opposed to a quadrant) geometry was selected to maximize signal level via increased surface area; while at least three signals were needed to resolve the beam direction. To meet the 45° half-angle FOV requirement, the collector plate outer diameter is determined by simple geometry – twice the height of the collector stack up plus the limiting aperture. The collector plates themselves have a gold surface that is deposited using an electroless palladium (Pd) immersion gold or EPIG process on a dissipative electronics board (Micarta MC511SN) that reduces the buildup of charge on the insulators. The electroless palladium plating has a thickness of 6−12 μm and the gold layer is 2−10 μm. Below the collectors is an aluminum mass that serves as thermal mass to efficiently dissipate heat into the structure.
5.4 Baffle
A baffle is needed to define the FC FOV and keep-out region (KOR). An unobstructed FOV and KOR are crucial for clean measurements without plasmas perturbed by the spacecraft structures. PIMS is accommodated on the Europa Clipper spacecraft with clear FOVs except for the zenith cup, which has the magnetometer boom within its FOV. Ideally, there should be no spacecraft component within the PIMS FC FOV. However, without the baffle the PIMS FC FOV is ±73.15°, which is too broad to ensure an unobstructed KOR. The PIMS accommodation ensures that no spacecraft components are within ±45°of the FOV and only limited components are within ±55°, except for a minor intrusion of the magnetometer boom into the zenith facing cup. To meet the angular resolution requirement, a baffle is needed to reduce plasmas perturbed by the spacecraft entering the FC while maintaining a strong signal at ±45° measurements.
The ideal baffle solutions allow 100% signal into the FC at ±45° and 0% signal into the FC at ±55°. In addition, for the ±45° incident angle, the projected illumination on the collector must generate sufficient signal on all three tridents to measurable levels above the noise threshold. As a compromise between driving the instrument mass and obtaining sufficient signal, the PIMS FC baffle design was relaxed by permitting signal attenuation at ±45° (21% signal attenuation) and signal leakage at ±45° (25% signal leakage).
5.5 PIMS Electronics
The PIMS block diagram is given in Fig. 9 and shows the primary functionality of the electronics within the PIMS instrument. Each PIMS sensor contains an electronics bank (Fig. 10) with three boards: high-voltage power supply, common electronics unit (CEU), and preamplifier. The outputs from each sensor’s (i.e., one of the two FC’s) three segmented current collector plates are amplified and multiplexed on the preamplifier board. The CEU is a single rigid-flex board that contains the Low-Voltage Power Supply (LVPS) and the Data Processing Board. The high-voltage power supply (HVPS) provides the high- and low-voltage signals to the Faraday cups. The following sections describe the details of these PIMS components.

The PIMS block diagram showing the primary components of the PIMS electronics and sensors

The PIMS electronics are contained within a shielded enclosure that resides inside of the outer housing. This shielded enclosure is referred to as the “piggy bank” or simply “the bank”
5.6 High Voltage Power Supply (HVPS)
The HVPS board (Fig. 11) produces the modulating voltage to the FC. Since the cup needs to cover such a large dynamic range of energies, two separate voltages are generated with only one voltage active at any given time. The low voltage output produces voltages between −80 V and +80 V. The high voltage output produces voltages between −2200 V to −10 V and 50 V to 6600 V. Each output voltage consists of a DC bias with an AC sine wave with a maximum amplitude of 8% to 15% of the DC level.

The PIMS High-Voltage Power Supply or HVPS. This HVPS generates all the voltages that operate the PIMS measurements
The HVPS Board is controlled by the CEU Board through a 37-pin nano-D connector. The CEU provides secondary power and digital control at a 3.3 V signaling level. The HVPS also provides several analog signals to the CEU for housekeeping measurements. The DC and AC levels are set by two digital-to-analog converters (DACs) that are controlled by the FPGA on the CEU Board. There are also several discrete control pins that define the operating mode of the high and low voltage supplies.
The high and low voltages are produced with different circuit designs. The high voltage output is derived from a bulk supply using separate positive and negative bulk supplies. The bulk supplies are produced by a multi-stage Cockroft-Walton charge pump multiplier. The multiplier chain rectifies an AC voltage created by a resonant push-pull switch-mode converter that amplifies a secondary CEU voltage through a high voltage transformer. The input voltage for the multiplier is a secondary voltage from the CEU that is converted to AC voltage on the HVPS board, and the resulting AC voltage amplitude is amplified by a transformer. The bulk supplies are set to a fixed level above the desired DC plus at least half of the expected amplitude of the modulation sine wave output voltage.
Two high-voltage optocouplers are placed in series connection across the positive and negative bulk supplies. The point where the optocouplers are connected to each other is the output of the HV modulated source. The implementation is like the class AB amplifier. The optocouplers’ conductance is controlled by an analog feedback loop. The control signal to the feedback loop is taken from the superimposed DC-level DAC output and AC-amplitude DAC output. These DACs are controlled by the CEU Board. The frequency component for the AC signal is controlled by a clock signal that is also provided from the CEU Board. The two optocouplers are driven such that the voltage between them has the desired DC level and AC frequency and sine wave amplitude.
The low voltage output circuit is controlled by the same DACs for AC and DC levels but with different scaling levels. Two pulse-train controlled flyback converters are used to generate separate up to +/−80 V bulk supplies. The charge pump multiplier is not needed since the voltage is much lower. Then an analog feedback loop modulates a push-pull output stage between the two bulk supplies to produce the desired DC level and AC modulation. This is a similar circuit configuration as the high voltage output, using transistors in place of optocouplers.
Several acquired analog signals are conditioned and then provided to the CEU Board to report housekeeping data. This data includes the values of the low-voltage output, high voltage output, the complete AC plus DC component of the output voltage, and the sine wave amplitude used to generate the AC waveform.
5.7 Common Electronics Unit (CEU)
The CEU Board (Fig. 12) is composed of two functional entities: the low voltage power supply (LVPS) and the data processing unit. The LVPS is primarily responsible for interfacing with spacecraft primary power and generating secondary voltages to be used by electronics within PIMS. The data processing unit includes all the control and data handling capabilities to process the PIMS signals.

The PIMS Common Electronics Unit (CEU) rigid-flex board consists of a low-voltage power supply (left) and data processing unit (right) connected by a flex cable. This novel design folds on itself to remove the need for stacking connectors and reduce the shielding required
The LVPS portion of the CEU is split between the primary side (spacecraft bus potential) and the secondary side (instrument chassis potential). On the primary side, there are circuits for instrument current sensing, under voltage lockout detection, and EMI filtering. The Pulse Width Modulation (PWM) controller and the main transformer bridge the primary and secondary sides. There are two secondary transformers that have windings for +5.25 V, −6.75 V, +15 V, +3.6 V, +2 V, and the feedback loop. A +3.3 V is linearly regulated from the +3.6 V to power digital IO interfaces and memories. A +1.5 V is linearly regulated from the +2 V to power the FPGA core.
Two pulse-train controlled flyback converters, like the low voltage supplies on the HVPS board are used to generate the suppressor voltage (SV) on the LVPS entity. One converter is designed to go positive up to +100 V and the other converter is designed to go negative down to −100 V. The SV output is divided between the outputs of these two converters.
The data processing portion of the CEU houses the FPGA, which runs a LEON processor. Memory support includes a PROM for boot code, MRAM for application code, and SRAM for data processing. Other FPGA support devices include the power-on-reset chip and the oscillator. To process housekeeping data, a 32-channel analog multiplexer is used. Its output feeds into a single-to-differential circuit which drives the input of a 14-bit analog-to-digital converter (ADC). There are several Low-Voltage Differential Signaling (LVDS) drivers and receivers used for telemetry, commanding, and testing interfaces. The FPGA also drives discrete control signals to the preamplifier and HVPS boards.
5.8 Preamplifier
The preamplifier board (preamp; Fig. 13) measures the current induced on the collector plate of the FC. To measure the signals from charged particles depositing into the collector plate, the analog input circuitry converts current to voltage, amplifies, filters, and DC offsets the signal to optimize it in preparation for digitization by the ADC. The ADC samples the conditioned waveform and converts the analog input signal to digital values that represent the input waveform. The preamplifier board provides a digital interface to the CEU Board and requires secondary power.

The PIMS preamplifier amplifies and processes the sensitive low-current measurements from the collector plates. The processing includes the digitization of the signals. This novel preamp design was created and tested by the University of Michigan. A simplified circuit diagram showing the key components are shown to the right
The preamplifier board receives six current inputs (two FCs with three tridents each). These inputs are immediately converted from current to voltage and amplified by a transimpedance amplifier circuit. After the initial amplification, each channel goes through two gain/filter stages. The preamp is designed such that the high-gain stage covers the range from 0.8 pA peak to peak (p-p) to 537 pA p-p and the low-gain stage from 117 pA p-p to 78 nA p-p. The flight preamp testing showed that the high-gain stage begins saturating around 340 pA p-p, and the low-gain stage has sensitivity above 10 pA p-p, giving a broader overlapping range. These stages provide gain to match the input signal level to the measurement range of the ADC and filter the noise outside of the modulation frequency of the instrument to improve SNR. Both gain stage outputs are measured by the ADC to maximize the dynamic range of the measurement system. Additionally, the three signals from each cup are summed together to measure the total DC current on the tridents without the high pass filtering of the other channels.
The most capable ADC available, given the harsh radiation environment, is a single input 14-bit device. An analog multiplexer (MUX) is used to allow the single channel ADC to measure the twelve outputs from both gain stages of each collector plate input. The CEU Board selects the appropriate MUX channel with digital IO control. The science ADC produces a 14-bit parallel output. This device resides on the preamp board but is controlled entirely by the CEU Board through digital IO. A precision +2.5 V reference is used to generate the bias voltages for the stages and the ADC. The preamplifier board has several in-flight calibration features. Board temperature and the reference voltage are measured through a spare input on the analog MUX. A calibration input current signal can also be injected from the CEU board using digital IO control.
The frequency response of the input path causes an inherent loss of amplitude and phase information. The bandwidth of this response describes the preamplifier’s ability to pass a signal from the collector to the ADC with minimal amplitude reduction.
5.9 Preamp Signal Processing
The signals from the PIMS preamplifier are processed using a quadrature demodulation in which the signal is decomposed into its in-phase and quadrature (I and Q) components that are then compressed and telemetered to the ground. The following is the process used in the PIMS FPGA to process these signals:
-
1.
The preamp captures an integral number of ADC samples for each of the high and low gain channels. Normal operational mode collects ten cycles of 320 Hz data with 32 samples per cycle for each channel. Of these ten cycles, two cycles are discarded to allow for HV settling.
-
2.
The first two cycles worth of data for each HV step are discarded to permit an analog transient settling time of 6.25 ms. This leaves eight cycles (256 ADC samples) per step for each channel to process.
-
3.
There are also four ADC samples taken for each analog multiplexer address as it transitions through all 16 analog channels. In the data processing, only the third sample is used for calculation, to allow for a transient settling time for the multiplexer output.
-
4.
The ADC samples are “Quadrature Demodulated”, that is multiplied by sine and cosine lookup table values corresponding to one 320 Hz period (36 samples per 320 Hz cycle).
-
5.
The I and Q multiplication results are totalized for each channel.
-
6.
The totalized values are normalized (divided by the total number of samples).
-
7.
To attain the vector magnitude on the ground we calculate \(\sqrt{I^{2} + Q^{2}}\).
-
8.
The resulting values are in ADC units. We then use the measured high or low gain values for the specific channels at the operating temperature to convert the ADC units to a current at 320 Hz.
5.10 Mechanical and Thermal Design
Thermal design of the PIMS Sensors includes thermal isolation of the instrument from the spacecraft with thermal control of the electronics. The FCs are thermally isolated from the instrument assembly through an insulating ring at the interface between the cup and instrument chassis to reduce instrument power. Thermal blankets cover nearly all the exposed outer assembly as well as the electronics assembly.
Within the FC, the modulator and collector assemblies are thermally interconnected. Cable length between the FCs and electronics is a compromise between thermal (longer cables are preferred for better isolation) and electrical (shorter cables are preferred for less capacitance) performance. A heater and temperature sensor are mounted to the electronics assembly. The baffle is cold-biased.
Of particular concern at Europa is insulator charging due to both penetrating electrons with energies above a few MeV and thermal plasma electrons with energies of several eV to a few keV. Penetrating electrons generally penetrate the thin outer housing of the FCs, but lower energy thermal electrons cannot penetrate the walls of the FC. To mitigate this charging effect, we both isolate all insulators from having a direct view to space and utilize static dissipative insulators that sufficiently stand off the high voltages in the cup while also dissipating built up charge. For this application, we utilize the Semitron ESd 520HR material with a resistivity in the range of 1010 to 10\(^{12}\ \Omega \)m. Because this material is not a perfect insulator, there is increased current draw on the high-voltage power supply, which is mitigated in the PIMS design by reducing the surface area in which the HV grid contacts the insulators. The insulating properties of this material are also affected by temperature with hot temperatures driving lower resistivities, and therefore PIMS generally will not be operated while hot (as it may be in parts of the inner cruise phase). In addition, the collector plate is made from a static dissipative material that can be exposed to the Europa environment without substantial charging which would affect the efficiency of particle collection.
5.11 PIMS Accommodation
PIMS contains two identical sensors that are mounted on separate sides of the Europa Clipper spacecraft (Fig. 14). Each sensor hosts two FCs that look out into orthogonal directions. The four cups altogether give a nearly complete view of the incoming plasma independent of the spacecraft orientation. The ram and anti-ram cups are oriented in the +Z and −Z directions respectively, and the nadir and zenith cups are oriented in the +Y and −Y directions.

The Europa Clipper spacecraft from two vantage points showing the PIMS accommodations. PIMS upper is mounted to a set of struts are that attached to the main vault, and PIMS lower is mounted to a rigid boom that is connected to the propulsion subsystem. PIMS upper contains the Ram (\({+}Z\)) and Zenith (\(-Y\)) cups, and PIMS lower contains the anti-ram (\(-Z\)) and nadir (\({+}Y\)) cups. The spacecraft axes are shown on the left figure
Each FC’s FOV represents a 90°-wide cone looking out into space. The FOVs are generally unobstructed for the ram, anti-ram, and zenith cups. The nadir cup is marginally obstructed by the magnetometer boom. Clear FOVs are crucial to sampling the plasma without deflections or other perturbations that come from either interaction with the magnetic sources in the objects or collisions with the structure. While the obstruction in the FOV of the nadir cup is unfortunate, the mission provides opportunities to characterize this obstruction using spacecraft rolls during the cruise phase of the mission.
5.12 Microphonics
Accommodating PIMS onboard the Europa Clipper spacecraft came with challenges, especially with the number of moving parts on the spacecraft – namely the solar array drives, the integrated pump assembly, the EIS gimbal for the Narrow Angle Camera, and the cryocoolers of the MASPEX and MISE instruments. Each of these components produces micro vibrations that could propagate into the PIMS mechanical interface. The voltages on the suppressor grid if placed in motion induce an electromotive force or current onto the collector causing an unwanted background to the measurement. This type of background was prevalent in Voyager measurements where the stepping motor of the energetic particle measurements imposed vibrations onto the boom that the Voyager PLS was co-mounted on.
Multiple studies were undertaken to reduce the influence of microphonics on PIMS, including a trade study on the cabling material and routing, adding additional grounding grids in the sensor, adjusting the suppressor voltage, and adding an isolation system to the mechanical interface. The detailed study of the microphonics expected at the sensor interface showed that the primary contribution to the PIMS backgrounds came when the vibrations are near the HV modulation frequency of 320 Hz. We tested the microphonics environment on the flight instrument using the vibration facilities at APL in air. The worst-case interface for coupled signals was the suppressor grid, due to it being the closest applied voltage to the collector plate. At the expected suppressor voltage level on PIMS (−40 V) and the expected microphonics loads the noise threshold raised anywhere from 5 −25 pA. With the suppressor turned off the noise floor raised 1 − 10 pA. Note that the expected microphonics environment may be less than that simulated in our test as it is unlikely that all sources are operating simultaneously. However, some influences are greater as the ambient air present during the test tends to damp out these micro vibrations compared to the vacuum of space.
5.13 Charging
The electrostatic charging of the solar powered Europa Clipper spacecraft influences our ability to accurately measure low-energy ions and electrons. The Europa Clipper project alongside the PIMS investigation team undertook several studies to understand the level to which the Europa Clipper spacecraft charges in various environments. These simulations utilized the NASCAP-2k modeling software (Mandell et al. 2006) and particle spectra inputs from Jun et al. (2005) as summarized in Table 3. These results represent the current best estimates of the charging levels and are likely to differ slightly in flight due to variability in the Europan environment and unknown factors such as Europa’s ionospheric density. Several factors influenced the charging, including the voltages placed on the solar panels and the degree of exposure of interconnects and other pieces of the solar array hardware. We note that the modeled electron environment in Europa’s ionosphere assumed a dominant cold, thermal electron population while the “torus” regions was assumed to be dominated by a hotter 100 eV electron population. These results in Table 3 were produced during the early design of the Europa Clipper flight system and were meant to bound the possible charging cases at Europa.
When the spacecraft is charged negatively, low-energy electrons are rejected from the spacecraft and never make it to the PIMS sensor and ions are accelerated into the PIMS sensor creating a change in the voltage that these ions appear in the PIMS data. The PIMS energy per charge resolution is a percentage of the voltage applied to the grids. Therefore, as the energy of the incoming ions increases the voltage levels that can be separated by the instrument degrades, limiting the ability to separate species groups in the Europa ionosphere and our ability to understand the ionospheric composition.
5.14 Magnetic Sources
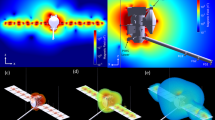
Plasma near the Europa spacecraft is not just affected by the electric fields created by the spacecraft but also the magnetic fields due to the coupling they have with charged particles. The electromagnetic interference and electromagnetic compatibly (EMI/EMC) group of the Europa Clipper project underwent a thorough assessment of the magnetic sources on the spacecraft to reduce both the DC and AC magnetic fields. Some of the key contributors to these magnetic fields include the reaction wheels near the bottom of the spacecraft, the traveling-wave tube amplifiers (TWTAs), various actuators on the spacecraft, and any significant current loops on the spacecraft. These magnetic field contributors generally contribute less than 250 nT into the PIMS field of view creating only minor perturbations to the low energy electrons and generally no perturbation to any ions. Figure 15 (left) illustrates the magnetic field magnitude of the entire Europa Clipper spacecraft, simulated with over 260 individual dipole magnetic sources tracked by the EMI/EMC group, using a combination of measurements and best estimates for the individual components. However, at time of this writing, the magnetic moments and orientations have not yet been assessed for all magnetic sources on the spacecraft, resulting in an uncertainty of the field magnitudes illustrated in the figure. Therefore, the PIMS team has run Monte Carlo simulations, which entail randomizing the orientation of the magnetic sources that have not yet been measured, to determine the distribution of potential fields at the locations of the PIMS sensors. Note that orientation is significant for a dipole source as the magnetic field is twice as strong along the magnetic pole than it is at the magnetic equator. As illustrated in Fig. 15 (right), the field distribution at each sensor is contained within the 250 nT requirement with margin, even considering the 3-sigma spread. Additional details of this study can be found in (Cochrane et al. 2023).

The magnetic field magnitude of the Europa Clipper spacecraft. (left) The estimated magnetic field magnitude of the Europa Clipper spacecraft, simulated from over 260 individual magnetic sources, using measurements and best estimates of each component. (right) The results of a Monte Carlo simulation that was performed to estimate the distribution of fields anticipated when the orientation of the unmeasured components was randomized. Note that for both PIMS upper and lower, the entire distribution (and hence 3-sigma spread) is contained within the 250 nT field requirement
6 Performance Validation and Calibration
The PIMS performance requirements and driving design details are given in Sect. 4. Here we detail the actual performance of the as-built PIMS sensors. PIMS Calibration activities primarily took place in two campaigns: A pre-environmental test campaign occurring between early September 2021 and Early November 2021, and a second, post-environmental test campaign in April 2022. Additionally, there was significant testing of EM and prototype hardware in the calibration facility prior to these two campaigns, and the PIMS EM made a trip to the Marshall Space Flight Center HISET test facility in February 2019 to examine angular performance.
The Kimball Physics ELG-2 electron gun was used throughout PIMS development for testing. This electron gun had an energy range from ∼30 eV to ∼1600 eV. Both energies are denoted as approximate, as at the low end of the beam energy there were challenges with getting a stable electron beam, and at the high end the energy was slightly influence by the focus setting. However, broadly speaking, across the entire energy range the electron gun produces an electron beam at consistent and known energy. A focus setting allows the beam to be somewhere between a narrow point (“pencil beam”), or a large area (“flood beam”). However, to achieve the large area, a significant amount of divergence is introduced into the beam, making it unsuitable for angular calibration.
The “Narrow” Ion Beam is a Colutron DC-100 Source (e.g., Wåhlin 1964). This ion beam produces a small (few mm in size) beam spot. The ion beam is fed by a gas bottle, which for PIMS testing was a mix of the elements H, He, N, and Ar. The ion beam has the capability of selecting individual species through use of a magnetic field and a velocity filter—since PIMS does not do mass determination, this is primarily of use in tuning the beam to achieve the cleanest source. This ion source has two different modes—a high energy mode which covers the 1−10 keV range well, and a low energy mode which runs the beam through a decelerator to produce beams at very low energies (down to a few eV). Nominally, the cross-over between the two beam modes is 1 keV, however in the range from ∼500−1000 eV it is possible to generate the same energy beam in either setting (with differing levels of ease in steering the beam).
Additional angular calibrations were performed using a wide Kaufman & Robinson KDC 100 ion beam source. This beam source is Argon gas fed, and produces a large diameter beam, with a reasonable degree of uniformity at relatively low energies (∼few hundred eV), but at notably higher flux levels than is desired for PIMS. Prior to testing with the PIMS EM, significant efforts were undertaken with a beam monitor to characterize the beam and assess the ideal operating settings that would be sufficient for PIMS. Additionally, due to concerns about the divergence of the beam, the source was mounted at the end of a 7.5′-long beam pipe that was designed to collimate the beam to <2° spread.
6.1 Energy Measurement
PIMS is required to sweep through the entire voltage range in as little time as possible to ensure the same quasi-static plasma is being measured. For the magnetosphere, the entire [−2 keV to −50 eV] and [+50 eV to +6 keV] range must be covered within four seconds. An example of this sweep characteristic is shown in Fig. 16. For the ionosphere, a 10 V subsection needs to be covered within one second. This time window along with the frequency that the HV waveform is produced (selected to be 320 Hz to limit the power requirements on the high-voltage power supply) and the number of samples per HV level result in a finite number of measurements, thus restricting the energy per charge resolution.

An example of the PIMS high voltage sweep characteristics. The upper panel is a collection of several voltage steps. The middle panel shows a zoom in on one voltage step showing the multiple 320 Hz sine wave components. The bottom panel shows the expected current output in the Jovian magnetosphere resultant from executing this waveform on the high-voltage grids in a nominal near Europa environment. The composition of the simulated plasma comes from the physical chemistry model of Delamere et al. (2005)
For the magnetospheric measurements, the four-second window results in 1280 sinusoidal periods to cover the entire energy per charge range. PIMS steps through the entire magnetosphere range in mostly logarithmic steps with linear steps at the higher voltages to limit the induced signal from large HV AC components, where each step corresponds to a bin in the final histogram data product. Whenever there is a new step, two sinusoidal periods are discarded as the HV waveform settles into a more ideal sinusoid. PIMS acquires at least eight periods of sinusoidal signals per HV step to be averaged over for statistical confidence.
Uncertainties in the actual voltage applied to the grids (both on the HV and LV grids) result in an uncertainty in the energy measurement. The HV and LV sensing network have inherent, quantifiable uncertainties. The HV placed on the grid is sensed by a series of 0.1% resistors (for the worst-case condition HV = 6.6 kV, the error is 0.4%). The LV placed on the grid is also sensed by a series resistor of 0.1%, however, it is much lower in resistance (megaohms instead of gigaohms) resulting in an error of up to 0.2%.
For the current-optimized grid geometry, grid stack-up, grid spacing, and sweeping/binning profile for 50 V to 6 kV and −50 V to −2 kV settings, the energy per charge resolution for magnetospheric mode on the HV grid is roughly 10% with the primary contribution being the chosen energy binning and dependent on angles and energy level. The energy per charge resolution for the low energy measurement is impacted by the spacecraft potential. Instead of an exponential sweep that covers the entire −50 V to 50 V range, a diagnostic linear sweep is applied to the full range to find the signal of interest. Once that is autonomously determined, the sweep covers a refined 10 V range. As a result of the 320 Hz modulation frequency and a one-second window, the energy per charge resolution is 0.3 V.
6.2 Energy Range and Energy Calibration
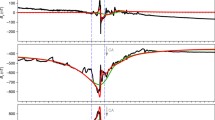
The primary driver of the energy range is the operational limits of the high- and low-voltage power supplies. There are slightly different gain and offset values for the power supplies on SN201 (PIMS Lower, nadir and anti-ram cups) and SN202 (PIMS Upper, zenith and ram cups). These values give the conversion from the commanded digital value (0 – 16383) to the actual voltage applied to the grids. After considering the power supply calibration, we also consider the actual beam energy that is cutoff by the voltage applied. Due to the voltage drop expected between the grid wires and the center of the grid cells the voltage required to measure a specific beam is slightly greater than the beam energy. To do this, we have measured several beams across the PIMS energy range and produced a linear fit between the applied voltage in which the peak AC signal is observed and the beam energy (Fig. 17). The resultant calibration coefficients for the pre-environmental and post-environmental test campaigns are given in Table 4. Note that differences between the pre- and post-environmental test campaigns are likely due to slight deviations in the beam configuration and that the post-environmental values are considered the best values for general use.

A sample of the PIMS energy calibration on PIMS Upper. The line gives the 1-to-1 values showing the expected greater voltage applied to the grids to measure a beam. A linear fit is produced to this relation and its coefficients are given in Table 2
6.3 Energy per Charge Resolution
The PIMS energy per charge resolution is fundamentally driven by many factors related to the Faraday Cup design, including the specifics of the grid geometry and spacing as well as the fidelity of the high-voltage signal applied to the grids and the specific voltage sweep run. Grey et al. (2018) detailed the specific design choices available for the PIMS instrument development and how they affected the instrument energy per charge resolution. For measurements of the PIMS energy per charge resolution in calibration, we produced voltage sweeps that aimed to exercise the intrinsic energy per charge resolution of the instrument. These voltage sweeps had bin widths that were roughly 1% of the energy wide (e.g., 20 V AC bin width was used for a DC voltage of 2 kV).
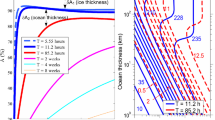
Figure 18 shows the result of the pre-environmental and post-environmental ion calibrations on PIMS Upper and PIMS Lower in magnetospheric mode. In general, the measured energy per charge resolution was below 5% FWHM and consistently 2-3% across most of the energy range. At lower energies, the beam thermal spread as well as the lowest commandable magnetospheric mode AC value of about 2 V contributed to the measured energy spread resulting in measured energy per charge resolutions of over 5%.

PIMS Calibration measurements of the instrument energy per charge resolution for ion measurements (left) and electron measurements (right) using the high-voltage section in all four cups. These values use the special, high-energy-resolution sweep tables to investigate the intrinsic energy per charge resolution of the PIMS instrument. The primary high-voltage sweep tables utilize energy per charge resolutions of \(\sim 10 -\)15%. In both the ion and electron measurements the intrinsic energy per charge resolution of the cups is 2−4%. At lower energies the resolution increases slightly due to the beam thermal spread, which is an issue with the low energies of the electron beam used
6.4 Current Calibration
The PIMS preamplifier was calibrated using a calibrated current source connected to the preamp inputs. The PIMS preamplifier contains six total inputs per board covering the high- and low-gain channels of the two cups per sensor. The high- and low-gain channels have significant overlap as shown in Fig. 19 from the wide beam testing. The instrument sends down both the high- and low- gain data for all measurements and the ground processing handles producing a single data product. Generally, the crossover point between the two channels is at the 8000 DN value on the high-gain channel, corresponding to ∼500 – 800 pA. The calibration coefficients for the preamplifiers are given in Table 5.

The PIMS high-gain signals plotted versus the low-gain signals for a sample calibration run with the wide beam. The high-gain channels are linear through a large range of signals from about 0.5 pA to about 700 pA, and the low-gain channels are responsive to signals from <50 pA to 100 nA. The overlap between the low- and high- gain channels allow for cross-calibration. For the combined data products for PIMS a crossover value is set for the high-gain data where if the signal exceeds that value the low-gain value is taken
6.5 Angular Measurement and Resolution
The instrument coordinate system utilizes two angles to describe the direction of the beam coming into the instrument: \(\theta \), the elevation angle, which is the angle with respect to the normal of the cup direction and \(\varphi \), the azimuthal angle, which is a rotation angle about the normal vector from the cup. The collector plate of the cup is divided into 3 × 120° trident sections. By comparing the relative signal levels on the different tridents, it is possible to extract the two unknown angles. By assuming that the incoming plasma is constant over the scale of the cup, the ratio of the areas comes from a geometric extraction of the projected circle from the limiting aperture down to the collector plate and incorporating the baffle. For particles at smaller elevation angles (broadly speaking, those with \(\theta < 25\)° from normal), the projected area from the limiting aperture on the collector plate is a circle that is displaced from the center of the cup proportional to the sine of the elevation angle. As such, larger flux differences between the collector plates lead to larger elevation angles.
We mapped between specific elevation and azimuth angles and the expected currents on the 3 tridents by numerically integrating the projected areas. With this mapping, we then built a full look-up table that is organized by the \(\theta \) and \(\varphi \) of the incoming beam and is shown in Fig. 20. Solving for the incident angle is therefore a process of running a minimization function against the lookup table. This lookup table is expected to be energy-independent, and no energy dependence was found during calibration.

To determine the angle of the beam coming into the PIMS cup we use the ratio of the three individual trident currents. The three figures display the lookup table used to match the relative currents with the two cup angles – \(\Theta \) (the elevation angle), and \(\Phi \) (the azimuthal angle). For each angle there is a unique value of the three trident currents
The physical geometry of the cup plays a critical role in setting the FOV and illuminating certain regions of the collector plate. The baffle height and aperture size were designed to optimize our FOV (ensuring that there is signal on all 3 tridents of the collector plate for \(\theta \) up to 45°) and our KOR (minimizing signal for \(\theta \) up to 55°). Modulator height and aperture were driven by grid manufacturer capabilities, mechanical survivability concerns, HV standoff rules, material charging avoidance, and cup energy per charge resolution requirements. The cup limiting aperture was driven by expected current densities at Europa estimated from Galileo and Voyager measurements. The collector plate size was determined to ensure resolvable measurements at \(\theta \) up to 45° for the worst-case energy level (6.6 kV).
To calculate the currents on each collector plate, several projections are taken shown in Fig. 21. By projecting the baffle aperture, modulator aperture, and limiting aperture unto the collector plate (with the HV grid deflection), we attain three critical angles. These three angles are the boundary conditions for our potential projection cases (Fig. 21).

The collector, limiting aperture, and baffle produce projection effects onto the visible areas or trident currents at each angle. The four cases shown here are as follows: CASE I: (\(\Theta < 25.9\)°): only the limiting aperture (green) projected onto the collector plate. The modulator aperture (black) and baffle aperture (blue) does not impact/restrict the flow plasma from hitting the collector plate. CASE II: (\(25.9^{\circ}\leq \Theta < 41.7\)°): the circle projected by the limiting aperture (green) is clipped by the modulator aperture (black). CASE III: (\(41.7^{\circ}\leq \Theta < 45\)°): the circle projected by the limiting aperture (green) is first clipped by the modulator aperture (black) and then clipped by baffle (blue). CASE IV: (\(\Theta \leq 45\)°): the circle projected by the limiting aperture (green) is clipped by the modulator aperture (black) and baffle aperture (blue) can no longer guarantee that there is sufficient signal on all three tridents. If signal is only on 2 tridents, then there is no determinate solution when solving for 2 unknowns (\(\Theta \) and \(\Phi \)) with two knowns. Note: because the four cups are mounted orthogonal to each other, when one PIMS cup is in CASE IV, there is another cup that is in CASE I, II, or III. Note the dashed lines show the projection of each feature when the HV deflection is considered as well
The AC voltage waveform used to reject/accept particles of different energy into the cup shifts the incoming particles as the voltage sweeps. As a result, the projection on the collector plate walks back and forth with the AC waveform. For small \(\theta \) incident angles (< 25.9°), the circle projected by the limiting aperture does not change because the limiting aperture is sitting behind the voltage grid, after the deflection. However, for larger incident angles, the shape of the clipping changes. The projections of the baffle aperture and modulator aperture (both of which sit above the grid voltages) have different deflections shown by the dashed lines in Fig. 21. In addition, the incoming flux or signal is attenuated by both the geometry of the cup and also the grid transparency as the incoming angle increases as shown in Fig. 22. To test the PIMS angular calibration, we executed a full raster of the field of view with an aperture-filling ion beam and used the look up table to determine the angle of the incoming beam (Fig. 23).

The signal attenuation for PIMS versus incident angle including the geometric factor and grid transparency. The PIMS FOV is attenuated strongly by the grid transparency throughout and by the baffle design past 45°

The PIMS wide angle beam raster of the field of view showing good correspondence between the angle of the PIMS aperture to the ion beam and the instrument measured angle for a 500 eV ion beam. Each point is an individual measurement of the beam, and the x-axis simply indexes the measurements. Note that some \(\Phi \) measurements appear to be off but are simply near 360° where the angle rolls over to 0°
7 PIMS Science Operations and Data Pipeline
PIMS science operations include instrument health and telemetry monitoring, planning, and commanding, downlink pipeline processing, calibration activities, science analysis, and coordination of high-level data product generation, archive, and delivery. PIMS follows the PDS recommendations for data products defined as telemetry, raw, partially processed, calibrated, and derived. For all data retrieved automated tools are used to perform the first-level health and safety checks.
7.1 PIMS Packet Types
PIMS produces four types of science data packets: histogram, DC, summed, and raw packets. There is also information about the state of the instrument electronics, FPGA, and software included in each packet type. Along with calibration data, this information is required to translate the histogram values from DNs to physical science units.
Science packets have an observation ID (Table 6) that is used to identify the observation in relation to when it was taken and some of the general parameters of the measurement. The observation ID contains the following information.
Histogram Packets
Histogram packets are the primary data product of the PIMS instrument. These packets are used to generate an energy versus flux plot for a sweep. Sweeps can be up to 256 steps, with each channel producing one histogram data product that consists of two data values (I and Q) at each step. Packets comprised of all data products for three channels generated during one sweep, as listed in Table 7. Packets are compressed across time using a “Fast” compression algorithm.
DC Measurement Packets
If enabled, DC summed data for each cup is obtained from the FPGA during the same sweep that the seed frame histogram packet (See Data Compression section) is generated. If histogram packets are not being generated, one DC packet is generated after a set number of sweep frames. The DC packet consists of the last 20-bit summed output from the preamp at each step in the sweep. Each 20-bit sum is truncated to 16 bits by removing the two most and least significant bits.
Summed and Raw Packets
Summed and raw packets are an intermediate uncompressed data product of the instrument processing chain and are generally used for instrument diagnostics. 20-bit summed data can be retrieved for each channel after each step completes. One 20-bit summed value consists of the non-truncated sum of up to 64 14-bit raw samples, each obtained at the same point in all sine waves during one voltage step. Raw packets are a collection of uncompressed data taken directly from the output of the analog to digital converter.
7.2 Data Compression
The primary science data output of PIMS is histograms of current versus energy. These are sent as absolute in-phase (I) and quadrature (Q) values per step and converted to magnitude using the root mean square on the ground. PIMS histogram I and Q data is compressed prior to transmittal using a lossless “Fast” compression algorithm. The “Fast” algorithm relies on these data values being of similar magnitude at the same step of all sweeps taken over a short time.
Compression of histograms is performed by software over sets of 32 sweeps. An initial set of four seed packets containing the uncompressed I and Q values for all twelve channels is sent with a compression frame number of zero. The differences between this initial seed packet and each subsequent sweep are transmitted in 31 subsequent packet groups, with compression frames of 1 through 31. Each histogram seed or difference value may be up to 18 bits. Each packet is sent with a width field indicating the number of bits used per value throughout that packet.
The zeroth frame data for each Application Process Identifier (APID) must be kept on hand when calculating the values of all following frames until the next zeroth frame is encountered. Once data from a nonzero frame has been parsed, it must be subtracted from the frame zero key values to obtain the final values. Table 8 illustrates this concept.
Commanding and Uplink Planning
PIMS has four science modes of operation: magnetospheric mode, ionospheric mode, transition mode, and survey mode. These modes are specifically set up to characterize the plasmas encountered by the Europa Clipper mission. PIMS is commanded to change modes based on locations in the orbit where the specific plasmas are expected (Fig. 24).

The PIMS science modes during one orbit of the Europa Clipper spacecraft
Magnetospheric mode is the primary workhorse of the PIMS modes and is designed to measure the Jovian magnetospheric plasmas. When Europa Clipper is within about 1 RJ of Europa the instrument is in magnetospheric mode. This mode utilizes a full range energy table that covers energy per charge values from 2 keV in electrons to 6 keV in ions and produces measurements on a four-second cadence. Survey mode is identical to magnetospheric mode except the data returned is decimated to a one-minute cadence to reduce the PIMS data volume.
When Europa Clipper is within the Europan ionosphere (about 2300 km from the Europa surface), the instrument is in ionospheric mode. This mode is designed to measure the low energy plasmas produced by the fast motion of the Europa Clipper spacecraft through the ionosphere. This mode produces high energy per charge resolution measurements within a 10 V window that shifts with the spacecraft potential. The instrument autonomously searches a wide energy window at low energy per charge resolution for the zero crossing of the current. Once the zero crossing is found, the voltage table is selected that covers 10 V above this value at high energy per charge resolution with a one-second measurement cadence.
Transition mode simply combines the ionospheric and magnetospheric modes into one data product. Functionally, this is simply an energy table that has both high- and low-voltage components. This data is taken at a five-second cadence. PIMS enters transition mode in the region where there could be ionospheric components as well as magnetospheric components in the plasma (∼13,000 km from Europa).
7.3 PIMS Energy Tables
PIMS can run different voltage sweeps on either the high- or low-voltage grids based upon a set of onboard, configurable tables that establish both the DC and AC values of the voltage signals. Several tables were used during the calibration and testing of the PIMS instrument. We have developed tables that are loaded onto the flight instruments to be used as the primary flight energy tables after launch. These sweep tables have the characteristics shown in Fig. 25. The main magnetospheric sweep table covers the full range of ion and electron measurements within the four second allotted period. The PIMS HVPS has the capability to run many different types of sweep tables and is reasonably flexible allowing for tables to be loaded based on discoveries made in flight.

An example PIMS sweep table for one magnetospheric sweep. Each point in the plot is an individual voltage value which contains several AC waveforms
7.4 PIMS Data Access
Once the data are telemetered to the ground the PIMS data processing pipeline works to convert the raw data products into partially processed, calibrated, and derived data products. These data products are made available in the Planetary Data System (PDS) and using the PIMS team interface called PIMS-MIDL. PIMS-MIDL, or Mission Independent Data Layer, is used primarily for displaying the data using time-based queries. This system is capable of both quickly displaying browse products for interrogation of the data products and of detailed investigation of the data. Functions such as time averaging, creating energy spectrograms, or displaying multiple data products are all available using this tool. The primary PIMS data products are given in Table 9.
7.5 Deriving Plasma Properties from PIMS Measurements
The PIMS measurements represent a 1.5D pseudo velocity distribution function of the plasma in that they give an energy per charge spectrogram and a bulk flow direction. To determine the crucial parameters of the plasma mass density, flow velocity, and temperature, the PIMS measurements will be forward modeled allowing for these parameters and a subset of the composition and charge state parameters of the plasma to vary. A similar procedure was used for Voyager measurements near Europa and has been dscribed along with various caveats in an extensive three-part study (Bagenal et al. 2017; Bodisch et al. 2017; Dougherty et al. 2017). This analysis generally retrieves unique results for the bulk plasma properties but can have degeneracies related to the ion composition especially when in hotter plasma regions. For the ionospheric measurements, especially in the case of a cold ionosphere the high velocity of the spacecraft yields significant separation in energy per charge of the ions in the ionosphere allowing for limited composition identification. We show a simulated PIMS spectrum in the ionosphere in Fig. 26.

Simulated PIMS spectrum in Europa’s ionosphere using the assumed composition from Johnson et al. (1998) and for a total ion density of 10,000 cm−3. The grey line gives the PIMS noise threshold which was found to be ∼1 pA during calibration and the black line gives the expected total current in pA. The colored lines give the contribution from various ion species that are expected in the ionosphere. This simulated ion spectrum assumes a 0 V charge on the spacecraft; however, it is likely the case that the spacecraft will be charged during the flybys producing an additional acceleration and changing the voltage that these ions appear at in the spectrum
8 Summary
The PIMS instrument was delivered to NASA’s Jet Propulsion Laboratory (JPL) in July of 2022 for integration onto the Europa Clipper spacecraft. Prior to delivery PIMS has undergone a full suite of environmental testing and calibration to ensure its robustness and performance in flight. Once integrated onto Europa Clipper PIMS participates in the full suite of flight tests prior to launch. PIMS will deliver a new and detailed view of the plasma surrounding Europa as well as the first direct measurements of Europa’s ionosphere. Along with the ECM instrument, PIMS will be essential in probing the subsurface ocean and determining its habitability.
References
Anderson JD, Schubert G, Jacobson RA, Lau EL, Moore WB, Sjogren WL (1998) Science 281:2019. (1979)
Bagenal F, Dols V (2020) J Geophys Res Space Phys 125:e2019JA027485
Bagenal F, Sidrow E, Wilson RJ, Cassidy TA, Dols V, Crary FJ, Steffl AJ, Delamere PA, Kurth WS, Paterson WR (2015) Icarus 261:1
Bagenal F, Wilson RJ, Siler S, Paterson WR, Kurth WS (2016) J Geophys Res, Planets 121:871
Bagenal F, Dougherty LP, Bodisch KM, Richardson JD, Belcher JM (2017) J Geophys Res Space Phys 122:8241
Bayer T, Bittner M, Buffington B, Castet JF, Dubos G, Jackson M, Lee G, Lewis K, Kastner J, Schimmels K, Morillo R, Salami M, Sindiy O, Smith B, Kirby K, Laslo N (2018) IEEE Aerosp Conf Proc 2018:1
Bodisch KM, Dougherty LP, Bagenal F (2017) J Geophys Res Space Phys 122:8277
Bridge HS, Belcher JW, Butler RJ, Lazarus AJ, Mavretic AM, Sullivan JD, Siscoe GL, Vasyliunas VM (1977) Space Sci Rev 21:259
Buffington B, Lam T, Campagnola S, Ludwinski J, Ferguson E, Bradley B (2017) Proc 68th Int Astronaut Congress IAC-17.C1.7.8
Cochrane CJ, Murphy N, Raymond CA, Biersteker JB, Dang K, Jia X, Korth H, Narvaez P, Ream JB, Weiss BP (2023) Space Sci Rev 219:34
Delamere PA, Bagenal F, Steffi A (2005) J Geophys Res Space Phys 110:12223
Dougherty LP, Bodisch KM, Bagenal F (2017) J Geophys Res Space Phys 122:8257
Grey M, Westlake J, Liang S, Hohlfeld E, Crew A, McNutt R (2018) IEEE Aerosp Conf Proc 2018:1
Harris CDK, Jia X, Slavin JA, Toth G, Huang Z, Rubin M (2021) J Geophys Res Space Phys 126:e2020JA028888
Hartkorn O, Saur J (2017) J Geophys Res Space Phys 122:11677
Heelis RA, Hanson WB (1998) Geophys Monogr Ser, vol 102, p 61
Jia X, Kivelson MG, Khurana KK, Walker RJ (2009) Space Sci Rev 152:271
Johnson RE, Killen RM, Waite JH, Lewis WS (1998) Geophys Res Lett 25:3257
Jun I, Garrett HB, Evans RW (2005) IEEE Trans Nucl Sci 52:2281
Khurana KK, Kivelson MG, Stevenson DJ, Schubert G, Russell CT, Walker RJ, Polanskey C (1998) Nature 1998(395):6704–6777
Khurana KK, Jia X, Kivelson MG, Nimmo F, Schubert G, Russell CT (2011) Science 332:1186 (1979)
Kivelson MG, Khurana KK, Joy S, Russell CT, Southwood DJ, Walker RJ, Polanskey C (1997) Science 276:1239 (1979)
Kivelson MG, Khurana KK, Russell CT, Volwerk M, Walker RJ, Zimmer C (2000) Science 289:1340 (1979)
Kliore AJ, Hinson DP, Flasar FM, Nagy AF, Cravens TE (1997) Science 277:355 (1979)
Mandell MJ, Davis VA, Cooke DL, Wheelock AT, Roth CJ (2006) IEEE Trans Plasma Sci 34:2084
Mauk BH, Mitchell DG, Krimigis SM, Roelof EC, Paranicas CP (2003) Nature 421:920
Mauk BH, Blake JB, Baker DN, Clemmons JH, Reeves GD, Spence HE, Jaskulek SE, Schlemm CE, Brown LE, Cooper SA, Craft JV, Fennell JF, Gurnee RS, Hammock CM, Hayes JR, Hill PA, Ho GC, Hutcheson JC, Jacques AD, Kerem S, Mitchell DG, Nelson KS, Paschalidis NP, Rossano E, Stokes MR, Westlake JH (2016) Space Sci Rev 199:471
Mauk BH, Haggerty DK, Jaskulek SE, Schlemm CE, Brown LE, Cooper SA, Gurnee RS, Hammock CM, Hayes JR, Ho GC, Hutcheson JC, Jacques AD, Kerem S, Kim CK, Mitchell DG, Nelson KS, Paranicas CP, Paschalidis N, Rossano E, Stokes MR (2017) Space Sci Rev 213:289
McGrath MA, Lellouch E, Strobel DF, Feldman PD, Johnson RE, McGrath MA, Lellouch E, Strobel DF, Feldman PD, Johnson RE (2004) Jpsm, vol 1, p 457
Nerney EG, Bagenal F (2020) J Geophys Res Space Phys 125:e2019JA027458
Phipps P, Bagenal F (2021) J Geophys Res Space Phys 126:e2020JA028713
Rubin M, Jia X, Altwegg K, Combi MR, Daldorff LKS, Gombosi TI, Khurana K, Kivelson MG, Tenishev VM, Tõth G, Van Der Holst B, Wurz P (2015) J Geophys Res Space Phys 120:3503
Saur J, Strobel DF, Neubauer FM (1998) J Geophys Res, Planets 103:19947
Saur J, Neubauer FM, Glassmeier K-H, Saur J, Neubauer FM, Glassmeier K-H (2009) Space Sci Rev 152:391
Schilling N, Neubauer FM, Saur J (2007) Icarus 192:41
Schuster A (1886) Lond Edinb Dublin Philos Mag 21:349
Smith HT, Mitchell DG, Johnson RE, Mauk BH, Smith JE (2019) Astrophys J 871:69
Smyth WH, Marconi ML (2006) Icarus 181:510
Szalay JR, Smith HT, Zirnstein EJ, McComas DJ, Begley LJ, Bagenal F, Delamere PA, Wilson RJ, Valek PW, Poppe AR, Nénon Q, Allegrini F, Ebert RW, Bolton SJ (2022) Geophys Res Lett 49:e2022GL098111
Thomas N, Bagenal F, Hill TW, Wilson JK, Thomas N, Bagenal F, Hill TW, Wilson JK (2004) In: McKinnon TEDWB, Bagenal F (eds) Jupiter. The planet, satellites and magnetosphere, pp 561–591
Wåhlin L (1964) Nucl Instrum Methods 27:55
Acknowledgements
The PIMS team sincerely thanks the multitude of scientists, engineers, managers, technicians, and other experts that came together to design, build, and test this instrument and the multitude of amazing people that have made Europa Clipper a success.
Funding
PIMS is funded by subcontract from JPL (award number 1531614).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
The authors have no competing interests to declare that are relevant to the content of this article. The authors have no financial or proprietary interests in any material discussed in this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Europa Clipper: A Mission to Explore Ocean World Habitability
Edited by Haje Korth, Bonnie J. Buratti and David Senske
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Westlake, J.H., McNutt, R.L., Grey, M. et al. The Plasma Instrument for Magnetic Sounding (PIMS) on the Europa Clipper Mission. Space Sci Rev 219, 62 (2023). https://doi.org/10.1007/s11214-023-01002-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11214-023-01002-9