
Abstract
In this study, we take into account the (2 + 1)-dimensional Boussinesq equation, a nonlinear evolution partial differential equation that describes how gravity waves move across the surface of the ocean. The symmetry reductions and group invariant precise solutions are systematically determined using the Lie symmetry analysis. We derive the precise multiple wave solutions using the multiple exp-function method, and then, using the multiplier method, we give the conservation laws. The dynamics of complicated waves and their interplay are faithfully recreated by the findings.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
A wide range of nonlinear evolution equations (NLEEs) have been widely utilized in recent decades to represent a number of physical situations that occur in many scientific domains, including applied biological science, engineering, hydrology, plasma physics, chemistry, and applied mathematics (Gao 2015; Jiang et al. 2010; Gao 2015a, b; Zhen et al. 2015; Sun et al. 2015; Xie et al. 2015; Ablowitz and Clarkson 1991; Wazwaz 2005, 2010a, b, 2012, 2013, 2014; Duan et al. 2013; Sebogodi et al. 2023; Podile et al. 2022; Ma 2021, 2022, 2023; Ye et al. 2021) It is crucial to get these NLEEs’ precise solutions in order to gain deeper understanding of the physical principles that underlie subsequent applications. Numerous potent and successful techniques (Chen and Lü 2023; Cao et al. 2023; Gao et al. 2023; Chen et al. 2024, 2023a, b; Liu et al. 2023; Yin and Lü 2023; Yin et al. 2022; Liu et al. 2022; Yin et al. 2021; Lü et al. 2021; Lü and Chen 2021; Zhao et al. 2022) that enable the generation of precise traveling wave solutions to NLEEs have been put forward in the literature. The Lie symmetry approach, sine-cosine method, inverse scattering transform method, and tanh method are a few of these well-known techniques (Wang and Wazwaz 2022a, b; Wang 2021a, b, c; Wang et al. 2020; Hu et al. 2020). A Gwaxa et al. (2023) special class of third-order polynomial evolutionary equations that admitted the same one-parameter point transformations which left the evolutionary equations invariant resulted in highly nonlinear third-order ordinary differential equations, finally a power series established interesting solutions. Solutions (Gwaxa et al. 2023) of general bond-pricing model that satisfy a given terminal condition were systematically illustrated via point symmetries.
Many different physical processes, including fluid mechanics, plasma waves, solid state physics, and plasma physics, are represented by the theory of nonlinear evolution equations. The interactions of the nonlinear and dispersive components of nonlinear partial differential equations result in solitons, also known as solitary waves (Sebogodi et al. 2023). A complete analysis of nonlinear partial differential equations must thus include calculating these sorts of solutions. There is no one approach that can be used to solve nonlinear partial differential equations, despite several efforts, and conservation laws are crucial for solution extraction. The initial step in issue solving is often determining the conservation laws of a system of nonlinear partial differential equations. A system of nonlinear partial differential equations is considered to be integrable if it has a significant number of conservation laws (Sebogodi et al. 2023).
The Boussinesq equation
where b and c are constants, was introduced by Boussinesq in 1871 to describe the propagation of long waves in shallow water under gravity propagating in both directions (Boussinesq 1877; Clarkson and Kruskal 1989). It also arises in several physical applications such as nonlinear lattice waves, iron sound waves in plasma and in vibrations in a nonlinear string and in the percolation of water in porous subsurface of a horizontal layer of material. The Boussinesq equation has been widely studied for its ability to describe solitons in various physical systems (Wazwaz 2007, 2006, 2010). These solitons are localized, stable waves that can propagate without changing their shape or amplitude. They are often observed in nonlinear systems such as water waves, optical fibers, and plasma waves. The presence of solitons in the Boussinesq equation has attracted significant attention due to its connection to incompressible Navier–Stokes equations and its relevance in mathematical fluid dynamics. Moreover, the Boussinesq equation not only allows for the study of solitons but also provides insights into wave motion in weakly nonlinear and dispersive media.Researchers have explored different aspects of solitons in the Boussinesq equation, such as their existence, properties, and behaviour under various conditions. These studies have contributed to our understanding of nonlinear wave phenomena and have practical implications in fields such as oceanography, optics, and plasma physics. The study of solitons in the Boussinesq equation is of great significance due to its wide range of applications and its contribution to our understanding. Furthermore, the discovery of solitons in the Boussinesq equation has paved the way for advancements in mathematical modelling and numerical simulations of buoyancy-driven flows, wave propagation, and nonlinear dynamics. Moreover, the soliton solutions of the Boussinesq equation have been used to explain various physical phenomena, such as wave-breaking events and rogue waves. Overall, the Boussinesq equation and its soliton solutions play a crucial role in advancing our understanding of nonlinear wave phenomena and their applications in diverse scientific disciplines (Wazwaz 2001; Liu et al. 2020; Li et al. 2022).
In this paper we study a (2 + 1)-dimensional Boussinesq equation (Wazwaz 2022)
where \(\alpha \),\(\beta \) and \(\gamma \) are non-zero constants. The Boussinesq (1.2) explains the propagation of gravity waves over the water surface, more specifically, the head-on collision of oblique wave profiles. The Boussinesq (1.2) equation involves two dissipative terms \(\mu _{\chi \chi }\) and \(\mu _{\varsigma \varsigma }\) and also fourth-order derivative term \(\mu _{\chi \chi \chi \chi }\), which represents dispersion effects. Although in Wazwaz (2022) the author has given a recommendable effort to solve (1.2), there is no unified method. The method employed in Wazwaz (2022) cannot be used to construct conservation laws or point symmetries and hence this prompted the utilization of the symmetry approach for the underlying Eq. (1.2).
This paper is planned into three sections. In Sect. 2 we compute courtesy of Lie point symmetry analysis leads to similarity reductions and exact solutions. We compute several waves of physical interest with innovative general wave frequencies and phase shifts via the multiple exp-function approach, which is a generalization of Hirota’s perturbation strategy in Sect. 3. Section 4 deals with conservation laws of with the aid of a variational approach. Finally, in Sect. 5 concluding remarks are given.
2 Lie symmetries analysis and exact solutions of (1.2)
Symmetry analysis (Sebogodi et al. 2023; Podile et al. 2022; Wang and Wazwaz 2022a, b; Wang 2021a, b, c; Wang et al. 2020; Hu et al. 2020; Gwaxa et al. 2023; Yildirim and Yasar 2018) is a powerful tool in the study of differential equations. By analyzing the intrinsic symmetries of equations, researchers can gain valuable insights into the underlying structures and properties of the system being studied. This analysis can help identify invariant solutions, which are solutions that remain unchanged under certain transformations. These invariant solutions often have physical significance and can provide a deeper understanding of the system’s behavior. Additionally, symmetry analysis allows for the reduction of the dimensionality of differential equations. This reduction can simplify the equations and make them more tractable for further analysis or numerical simulations. Not only does symmetry analysis provide insights into the structure and properties of differential equations, but it also helps identify invariant solutions with physical significance. Using the symmetry method, researchers can transform the solutions of simple linear differential equations to find solutions of more complex nonlinear differential equations. Furthermore, symmetry analysis is not limited to differential equations alone, but can also be applied to difference equations. Through symmetry analysis, researchers can find traveling wave solutions of differential equations. In summary, symmetry analysis is a powerful tool in the study of differential equations.
We now compute the point symmetries (Sebogodi et al. 2023; Podile et al. 2022; Wang and Wazwaz 2022a, b; Wang 2021a, b, c; Wang et al. 2020; Hu et al. 2020; Gwaxa et al. 2023; Yildirim and Yasar 2018) of a (2 + 1)-dimensional Boussinesq equation (1.2). The vector field of the form
would generate all the desired Lie point symmetries of (1.2). It should be noted that this would be initiated by applying the fourth prolongation pr\(^{(4)} \mho \) to (1.2). This algorithmic procedure yields an overdetermined system of linear partial differential equations (PDEs). The general solution of the overdetermined system of linear PDEs is given by
where \(\digamma _{1},\digamma _{2},\digamma _{3}\) and \(\digamma _{4}\) are arbitrary functions of \(\tau \) and \(\varsigma \). For simplicity we confined the arbitrary functions to quadratic functions. As a results we obtain the 12-dimensional Lie algebra spanned by the following linearly independent operators:
2.1 Symmetry reductions and group invariant solutions (1.2)
To obtain symmetry reduction, one has to solve the associated Lagrange equations
We consider the following cases:
Case 1. \(\mho _1\).
The symmetry \(\mho _{1}\) gives rise to the invariants
Considering \(\vartheta \) and \(\varrho \) as the new independent variable and \(\varOmega \) as the new dependent variable, system (1.2) transforms to
which is a nonlinear PDE in two independent variables. We now use the Lie point symmetries of (2.1) to reduce it to an ordinary differential equation (ODE). We obtain one Lie point symmetry of (2.1) as follows:
using the above symmetry, we obtain the following two invariants:
which give rise to a group-invariant solution \(\phi =\phi (\zeta )\). Using these invariants, equation (2.1) is transformed into the fourth-order nonlinear ODE
where \('\)denotes the differentiation with respect to the variable \(\zeta \).
Case 2. \(\mho _2+\mho _5\)
The symmetry \(\mho _{2}+\mho _5\) gives rise to the invariants
Treating \(\varOmega \) as the new dependent variable and \(\vartheta ,\varrho \) as new independent variables, Eq. (1.2) transforms to
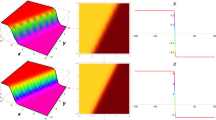
which is a nonlinear partial differential equation in two independent variables, whose solution is
Where \(C_1,C_{2}\) and \(C_{3}\) are arbitrary parameters. Reverting back to our original variables, the topological soliton solution of (1.2) takes the form
A profile of the solution (2.5) is given in Fig. 1. below.

Evolution of solitary wave solution (2.5), with the help of suitable choices of parameters \(\beta =\frac{1}{16}\), \(\alpha =2\), \(C_{2}=C_{3}=1\)
Case 3. \(\mho _{2}+\mho _5+\mho _8\)
Symmetry \(\mho _{2}+\mho _5+\mho _8\) gives rise to the invariants
Considering \(\vartheta \) and \(\varrho \) as the new independent variable and \(\varOmega \) as the new dependent variable, Eq. (1.2) transforms to
which gives the solution of the form
Using the invariants (2.6) together with Eq. (2.7), we obtain a topological soliton solution of (1.2) as
Case 4. Also considering the combinations \(\mho _{4},\mho _7\) and \(\mho _{10}\), we obtain the following three invariants
By treating \(\varOmega \) as the new dependent variable and \(\vartheta \) and \(\varrho \) as the new independent variables, (1.2) transforms to
which is a nonlinear PDE in two independent variables and its solution is given by
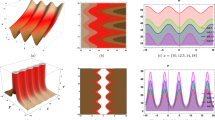
Now we revert back to our original variables, the cnoidal wave solution of (1.2) takes the form
A profile of the solution (2.13) is given in Fig. 2.

Evolution of periodic wave solution (2.13), with the help of suitable choices of parameters \(\beta =\frac{1}{8}\), \(\alpha =2\), \(\gamma =\frac{9}{64}\), \(C_{1}=\frac{1}{3}\),\(C_{2}=\frac{1}{2}\),\(C_{3}=\frac{1}{4}\),\(C_{4}=\frac{2}{4}\)g
It should be pointed out that in the aforementioned technique, one could obtain more group invariants solutions of the generalized (2 + 1)-dimensional Boussinesq equation by using the other symmetries. In many applications, group invariant solutions describe the limiting behaviour of physical problems that are extremely far away from their initial or boundary conditions.
3 Multiple exp-function method
For exact multiple wave solutions of nonlinear partial differential equations, a multiple exp-function approach was suggested in Ma et al. (2010) The approach offers a straightforward and systematic solution process that generalizes Hirota’s perturbation technique. The assumption is made that polynomials of exponential functions can be used to define the multisoliton solutions. A generalization of Hirota’s perturbation system is what the multiple expfunction algorithm essentially is. Generic phase shifts and wave frequencies are also included in the following solutions. The crucial steps of the multiple exp-function method can be summarized as follows (Adem 2016; Ma et al. 2010; Sebogodi et al. 2023; Podile et al. 2022; Yildirim and Yasar 2017):
Step 1 Let us consider the following (1 + 1)-dimensional NLEE:
Step 2 Suppose the solution of above NLEE can be expressed as
in which \(p_{rs,ij}\) and \(q_{rs,ij}\) are unknowns to be determined and
Step 3 Substituting (3.2) and its derivatives into (3.1) yields the following transformed equation
Step 4 By setting the numerator of the function \(Q(\chi ,\tau ,\eta _1, \eta _2,\cdots ,\eta _n)\) to zero, we will reach an algebraic system which its solution yields the multiple wave solution of (3.1) as
3.1 Application of the multiple exp-function algorithm to the generalized (2 + 1)-dimensional Boussinesq equation (1.2)
In this subsection, we will employ the multiple exp-function method to obtain one- and two-wave solutions of (1.2). We use the potential \(\mu =\nu _\chi \) so that Eq. (1.2) takes this form
It should be noted that the solutions that will be appear in the next two subsections are soliton type solutions.
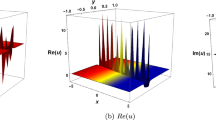
3.1.1 One-wave solution of (1.2)
We start with one-wave function
where \(A_{1}\) is a constant (Fig. 3). By applying the multiple exp-function algorithm, we obtain with the aid of Maple:
where \(\theta \) is any solution \(-4\,\gamma \,{k_{{1}}}^{4}+{\alpha }^{2}{l_{{1}}}^{2}-2\,{ \theta }\, \alpha \,l_{{1}}+{{ \theta }}^{2}+4\,{k_{{1}}}^{2}=0\).

Evolution of the one-wave solution (3.7)
3.1.2 Two-wave solution of (1.2)
We consider two-wave solutions based on the statement in Step 2, we assume that Eq. (1.2) has the rational function of two-wave solutions as shown in the following form:
with P and Q being defined by
where
Applying the multiple exp-function algorithm, with the aid of Maple leads to the following case:
where \(\sigma \) is any solution of \(-{\alpha }^{2}{k_{{1}}}^{4}{l_{{2}}}^{2}+{\alpha }^{2}{k_{{2}}}^{4}{l_{{ 1}}}^{2}+4\,\alpha \,{k_{{1}}}^{4}l_{{2}}\omega _{{2}}-4\,{k_{{1}}}^{4}{ k_{{2}}}^{2}-4\,{k_{{1}}}^{4}{\omega _{{2}}}^{2}+4\,{k_{{1}}}^{2}{k_{{2 }}}^{4}-2\,{ \sigma }\,\alpha \,{k_{{2}}}^{2}l_{{1}}+{{ \sigma }}^{2}=0. \)
4 Conservation laws (1.2)
Conservation laws (Sebogodi et al. 2023; Podile et al. 2022; Gwaxa et al. 2023) are fundamentally important because they give physical, conserved values for every solution \(\mu (\tau ,\chi ,\varsigma )\) and preserved standards that are helpful for solving problems and verifying the accuracy of numerical solution techniques. Indeed conservation laws of partial differential equations are essential in understanding the behavior and properties of physical systems. By studying the conservation laws, we can determine how quantities such as mass, energy, momentum, and charge are conserved or transformed within a system. These laws provide valuable insights into the dynamics and evolution of various phenomena in fields such as mathematics, physics, chemistry, and biology. Conservation laws of partial differential equations are fundamental principles that govern the behavior and evolution of physical systems. They provide a framework for understanding how certain quantities, such as mass, energy, momentum, and charge, are conserved or transformed within a system. Furthermore, the generation of conservation laws has practical applications in fields such as fluid dynamics, solid mechanics, electromagnetism, and thermodynamics. By studying conservation laws, researchers can gain valuable insights into the properties and behavior of solutions to nonlinear partial differential equations. Additionally, the existence of a large number of conservation laws in a system of partial differential equations is a strong indication of its integrability. In summary, conservation laws play a crucial role in the study of differential equations as they describe physical conserved quantities and provide insights into the behavior and properties of solutions to partial differential equations. The knowledge of conservation laws for systems of partial differential equations allows one to gain useful information on the properties of the solutions. For example, conservations laws can help in determining the stability and uniqueness of solutions, as well as providing a foundation for developing numerical methods to approximate thesesolutions. The study of conservation laws of partial differential equations is an essential step in understanding the behavior and properties of physical systems. It allows us to determine how quantities such as mass, energy, momentum, and charge are conserved or transformed within a system, providing valuable insights into the dynamics and evolution of various phenomena in fields such as mathematics, physics, chemistry, and biology.
A local conservation law of (1.2) is a continuity equation
holding for all solutions of (1.2), where \(T^{\tau }\) is the conserved density and \((T^{\chi },T^{\varsigma })\) is the spatial flux.
In this section we construct conservation laws (Sebogodi et al. 2023; Podile et al. 2022; Gwaxa et al. 2023) of the (2 + 1)-dimensional Boussinesq equation (1.2). Consider a differential equation \(E=0\), and \({\Lambda }\) being the characteristic function. \({\Lambda E}\) is divergent if and only if \(E_\mu (QE) = 0\), where \(E_\mu \) is the Euler–Lagrange operator. Without loss of generality, we can now state the following theorems.
Theorem 1
The (2 + 1)-dimensional Boussinesq equation (1.2) admits a characteristic function of the form:
where \(H_{1}(2\varsigma -\alpha \tau ),....,H_{4}(2\varsigma -\alpha \tau )\) are arbitrary functions of \(2\varsigma -\alpha \tau \).
The proof of the above theorem is a straightforward but lengthy computation can be carried out from \(\varepsilon _\mu ( \Lambda E)=0\). The expansion of this equation leads to an over-determined system of linear differential equations in the unknown characteristic function \(\Lambda \). Solving these equations, one obtains the characteristic function (4.2).
Theorem 2
The (2 + 1)-dimensional Boussinesq equation (1.2) strictly admits an infinite set of conservation laws corresponding to the above characteristic function (4.2), namely:
The proof of Theorem 2 is straightforward but long. It consists of applying the divergence equation \(\partial _\tau T^\tau +\partial _\chi T^\chi +\partial _\varsigma T^\varsigma =0\), which vanishes for all solutions of the (2 + 1)-dimensional Boussinesq equation (1.2).
We consider the physical implications and justifications that follow from conserved vectors, or conservation laws. There are conservation laws in fundamental branches of physics, as well as in its applications and related fields. Physical laws like the conservation of energy, momentum, and mass are essentially expressed mathematically. Conservation laws (Sebogodi et al. 2023; Podile et al. 2022) preserve commanding physical information about the complicated processes of non-linear systems. For the (2 + 1)-dimensional Boussinesq equation, a family of arbitrarily infintely many conservation laws can be obtained due to the existence of arbitrary functions in the multiplier.
5 Concluding remarks
We constrained the arbitrary functions in the infinitesimal generators to take the form of quadratic functions, which resulted in symmetry reductions and group invariant solutions for the (2 + 1)-dimensional Boussinesq equation. In certain cases, the group invariant solutions were of the of a topological soliton type. In order to find one-wave and two-wave solutions, we have used the multiple exp-function approach resulting in further soliton type solutions. In addition, we used the multiplier approach to construct the conservation laws for the (2 + 1)-dimensional Boussinesq equation. The exact solutions can be used as yardsticks against the numerical simulations in theoretical physics and fluid mechanics. The conserved vectors obtained here can be used to construct new solutions and this will be reported elsewhere.
Data Availability
Not applicable.
References
Ablowitz, M.J., Clarkson, P.A.: Solitons, Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge, UK (1991)
Adem, A.R.: The generalized (1+1)-dimensional and (2 + 1)-dimensional Ito equations: multiple exp-function algorithm and multiple wave solutions. Comput. Math. Appl. 71, 1248–1258 (2016)
Boussinesq, J.V.: Essai sur la thëorie des eaux courantes. Mm. Prsents Divers Savants Acad Sci Inst Nat Fr XXIII. 1877: 55–108
Cao, F., Lü, X., Zhou, Y.X., Cheng, X.Y.: Modified SEIAR infectious disease model for Omicron variants spread dynamics. Nonlinear Dynam. 111, 14597–14620 (2023)
Chen, Y., Lü, X.: Wronskian solutions and linear superposition of rational solutions to B-type Kadomtsev-Petviashvili equation. Phys. Fluids 35, 106613 (2023)
Chen, S.J., Lü, X., Yin, Y.H.: Dynamic behaviors of the lump solutions and mixed solutions to a (2 + 1)-dimensional nonlinear model. Commun. Theor. Phys. 75, 055005 (2023)
Chen, Y., Lü, X., Wang, X.L.: Bäcklund transformation, Wronskian solutions and interaction solutions to the (3 + 1)-dimensional generalized breaking soliton equation. Eur. Phys. J. Plus 138, 492 (2023)
Chen, S.J., Yin, Y.H., Lü, X.: Elastic collision between one lump wave and multiple stripe waves of nonlinear evolution equations. Commun. Nonlinear Sci. Numer. Simul. 130, 107205 (2024)
Clarkson, P.A., Kruskal, M.D.: New similarity solutions of the Boussinesq equation. J. Math. Phys. 30, 2201–2213 (1989)
Duan, J.S., Rach, R., Wazwaz, A.M., Chaolu, T., Wang, Z.: A new modified Adomian decomposition method and its multistage form for solving nonlinear boundary value problems with Robin boundary conditions. Appl. Math. Model. 37, 8687–8708 (2013)
Gao, X.Y.: Variety of the cosmic plasmas: general variable-coefficient Korteweg-de Vries-Burgers equation with experimental/observational support. Europhys. Lett. 110, 15002 (2015)
Gao, X.Y.: Bäcklund transformation and shock-wave-type solutions for a generalized (3 + 1)-dimensional variable-coefficient B-type Kadomtsev- Petviashvili equation in fluid mechanics. Ocean Eng. 96, 245–247 (2015)
Gao, X.Y.: Incompressible-fluid symbolic computation and Bäcklund transformation: (3 + 1)-dimensional variable-coefficient Boiti-Leon-Manna- Pempinelli model. Z Naturforsch A. 70, 59–61 (2015)
Gao, D., Lü, X., Peng, M.S.: Study on the (2 + 1)-dimensional extension of Hietarinta equation: soliton solutions and Bäcklund transformation. Phys. Scripta 98, 095225 (2023)
Gwaxa, B., Jamal, S., Johnpillai, A.G.: On the conservation laws, Lie symmetry analysis and power series solutions of a class of third-order polynomial evolution equations. Arab. J. Math. 12, 553–564 (2023)
Hu, W., Wang, Z., Zhao, Y., Deng, Z.: Symmetry breaking of infinite-dimensional dynamic system. Appl. Math. Lett. 103, 106207 (2020)
Jiang, Y., Tian, B., Liu, W.J., Li, M., Wang, P., Sun, K.: Solitons, Bäcklund transformation, and Lax pair for the (2 + 1)-dimensional Boiti-Leon-Pempinelli equation for the water waves. J. Math. Phys. 51, 093519 (2010)
Li, B.Q., Wazwaz, A.M., Ma, Y.L.: Two new types of nonlocal Boussinesq equations in water waves: Bright and dark soliton solutions. Chin. J. Phys. 77, 1782–1788 (2022)
Liu, Y., Li, B., Wazwaz, A.M.: Novel high-order breathers and rogue waves in the Boussinesq equation via determinants. Math. Methods Appl. Sci. 43, 3701–3715 (2020)
Liu, B., Zhang, X.E., Wang, B., Lü, X.: Rogue waves based on the coupled nonlinear Schrödinger option pricing model with external potential. Modern Phys. Lett. B 36, 2250057 (2022)
Liu, K., Lü, X., Gao, F., Zhang, J.: Expectation-maximizing network reconstruction and most applicable network types based on binary time series data. Phys. D 454, 133834 (2023)
Lü, X., Chen, S.J.: Interaction solutions to nonlinear partial differential equations via Hirota bilinear forms: one-lump-multi-stripe and one-lump-multi-soliton types. Nonlinear Dynam. 103, 947–977 (2021)
Lü, X., Hui, H.W., Liu, F.F., Bai, Y.L.: Stability and optimal control strategies for a novel epidemic model of COVID-19. Nonlinear Dynam. 106, 1491–1507 (2021)
Ma, W.X.: Nonlocal PT-symmetric integrable equations and related Riemann-Hilbert. Partial Differ. Equ Appl. Math. 4, 100190 (2021)
Ma, W.X.: Soliton solutions by means of Hirota bilinear forms. Partial Differ. Equ Appl. Math. 5, 100220 (2022)
Ma, W.X.: Soliton hierarchies and soliton solutions of type ( \(-\lambda ^*, -\lambda \)) reduced nonlocal nonlinear Schrödinger equations of arbitrary even order. Partial Differ. Equ Appl. Math. 7, 100515 (2023)
Ma, W.X., Huang, T.W., Zhang, T.: A multiple exp-function method for nonlinear differential equations and its application. Phys. Scr. 82, 065003 (2010)
Podile, T.J., Adem, A.R., Mbusi, S.O.: Multiple exp-function solutions, group invariant solutions and conservation laws of a generalized (2 + 1)-dimensional Hirota-Satsuma-Ito equation. Malays J. Math. Sci. 16, 793–811 (2022)
Sebogodi, M.C., Muatjetjeja, B., Adem, A.R.: Traveling wave solutions and conservation laws of a generalized Chaffee-Infante equation in (1+3) dimensions. Universe 9, 224 (2023)
Sun, W.R., Tian, B., Jiang, Y., Zhen, H.L.: Optical rogue waves associated with the negative coherent coupling in an isotropic medium. Phys. Rev. E. 91, 023205 (2015)
Wang, G.: A new (3 + 1)-dimensional Schrödinger equation: derivation, soliton solutions and conservation laws. Nonlinear Dynam. 104, 1595–1602 (2021)
Wang, G.: Symmetry analysis, analytical solutions and conservation laws of a generalized KdV-Burgers-Kuramoto equation and its fractional version. Fractals 29, 2150101 (2021)
Wang, G.: A novel (3 + 1)-dimensional sine-Gordon and a sinh-Gordon equation: derivation, symmetries and conservation laws. Appl. Math. Lett. 113, 106768 (2021)
Wang, G., Wazwaz, A.M.: On the modified Gardner type equation and its time fractional form. Chaos Solitons Fractals 155, 111694 (2022)
Wang, G., Wazwaz, A.M.: A new (3 + 1)-dimensional KdV equation and mKdV equation with their corresponding fractional forms. Fractals 30, 2250081 (2022)
Wang, G., Yang, K., Gu, H., Guan, F., Kara, A.H.: A (2 + 1)-dimensional sine-Gordon and sinh-Gordon equations with symmetries and kink wave solutions. Nuclear Phys. B 953, 114956 (2020)
Wazwaz, A.M.: Construction of soliton solutions and periodic solutions of the Boussinesq equation by the modified decomposition method. Chaos Solitons Fractals 12, 1549–1556 (2001)
Wazwaz, A.M.: Exact solutions for the ZK-MEW equation by using the tanh and sine-cosine methods. Int. J. Comput. Math. 82, 699–708 (2005)
Wazwaz, A.M.: A variety of exact wave solutions with distinct physical structures for the Boussinesq system. Commun. Nonlinear Sci. Numer. Simul. 11, 376–390 (2006)
Wazwaz, A.M.: Multiple-soliton solutions for the Boussinesq equation. Appl. Math. Comput. 192, 479–486 (2007)
Wazwaz, A.M.: A study on KdV and Gardner equations with time-dependent coefficients and forcing terms. Appl. Math. Comput. 217, 2277–2281 (2010)
Wazwaz, A.M.: Completely integrable coupled KdV and coupled KP systems. Commun. Nonlinear Sci. Numer. Simul. 15, 2828–2835 (2010)
Wazwaz, A.M.: Non-integrable variants of Boussinesq equation with two solitons. Appl. Math. Comput. 217, 820–825 (2010)
Wazwaz, A.M.: Solitons and singular solitons for a variety of Boussinesq-like equations. Ocean Eng. 53, 1–5 (2012)
Wazwaz, A.M.: Multiple soliton solutions for an integrable couplings of the Boussinesq equation. Ocean Eng. 73, 38–40 (2013)
Wazwaz, A.M.: Kink solutions for three new fifth order nonlinear equations. Appl. Math. Model. 38, 110–118 (2014)
Wazwaz, A.M.: Derivation of lump solutions to a variety of Boussinesq equations with distinct dimensions. Int. J. Numer. Methods Heat Fluid Flow. 32, 3072–3082 (2022)
Xie, X.Y., Tian, B., Sun, W.R., Sun, Y.: Rogue-wave solutions for the Kundu-Eckhaus equation with variable coefficients in an optical fiberz. Nonlinear Dyn. 81, 1349–1354 (2015)
Ye, R., Zhang, Y., Ma, W.X.: Darboux transformation and dark vector soliton solutions for complex mKdV systems. Partial Differ. Equ Appl. Math. 4, 100161 (2021)
Yildirim, Y., Yasar, E.: Multiple exp-function method for soliton solutions of nonlinear evolution equations. Chinese Phys. B 26, 070201 (2017)
Yildirim, Y., Yasar, E.: A (2 + 1)-dimensional breaking soliton equation: solutions and conservation laws. Chaos Solitons Fractals 107, 146–155 (2018)
Yin, Y.H., Lü, X.: Dynamic analysis on optical pulses via modified PINNs: soliton solutions, rogue waves and parameter discovery of the CQ-NLSE. Commun. Nonlinear Sci. Numer. Simul. 126, 107441 (2023)
Yin, M.Z., Zhu, Q.W., Lü, X.: Parameter estimation of the incubation period of COVID-19 based on the doubly interval-censored data model. Nonlinear Dynam. 106, 1347–1358 (2021)
Yin, Y.H., Lü, X., Ma, W.X.: Bäcklund transformation, exact solutions and diverse interaction phenomena to a (3 + 1)-dimensional nonlinear evolution equation. Nonlinear Dynam. 108, 4181–4194 (2022)
Zhao, Y.W., Xia, J.W., Lü, X.: The variable separation solution, fractal and chaos in an extended coupled (2 + 1)-dimensional Burgers system. Nonlinear Dynam. 108, 4195–4205 (2022)
Zhen, H.L., Tian, B., Wang, Y.F., Liu, D.Y.: Soliton solutions and chaotic motions of the Zakharov equations for the Langmuir wave in the plasma. Phys. Plasmas. 22, 032307 (2015)
Funding
Open access funding provided by University of South Africa.
Author information
Authors and Affiliations
Contributions
SOM: Conceptualization, Formal analysis, Investiga-tion, Methodology, Project administration, Software, Supervision, Validation, Writing-original draft, Writing-review and editing. ARA: Investigation, Methodology, Software, Validation, Writing-review and editing. BM: Investigation, Methodology, Software, Validation, Writing-review and editing.
Corresponding author
Ethics declarations
Conflict of interests
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mbusi, S.O., Adem, A.R. & Muatjetjeja, B. Lie symmetry analysis, multiple exp-function method and conservation laws for the (2+1)-dimensional Boussinesq equation. Opt Quant Electron 56, 670 (2024). https://doi.org/10.1007/s11082-024-06339-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-024-06339-1