
Abstract
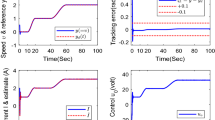
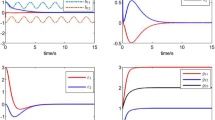
The global robust regulation problem is studied for a class of cascade nonlinear systems subject to the external disturbance. The considered system represents more general classes of nonlinear uncertain systems, for example, the much weaker integral input-to-state stable (iISS) cascaded subsystem, the unknown control coefficients, the unmeasured states appearing in the nonlinear uncertainties and the external disturbance additively in the input channel. Combined the ideas of the Nussbaum-type gain and the disturbance as a generalized state, a dynamic extended state observer (ESO) based on a Riccati differential equation is constructed to overcome these difficulties. It is shown that the global robust regulation problem is well addressed by the proposed method. In the simulation part, the fan speed control system is used as a practical example to demonstrate its efficacy.



Similar content being viewed by others

References
Karafyllis, I., Jiang, Z.P.: Stability and Stabilization of Nonlinear Systems. Springer, London (2011)
Sontag, E.D.: Smooth stabilization implies coprime factorization. IEEE Trans. Autom. Control 34(4), 435–443 (1989)
Sontag, E.D.: Comments on integral variants of ISS. Syst. Control Lett. 34(1–2), 93–100 (1998)
Angeli, D., Sontag, E.D., Wang, Y.: A characterization of integral input to state stability. IEEE Trans. Autom. Control 45(6), 1082–1087 (2000)
Ito, H.: A Lyapunov approach to cascade interconnection of integral input-to-state stable systems. IEEE Trans. Autom. Control 55(3), 702–708 (2010)
Arcak, M., Angeli, D., Sontag, E.D.: A unifying integral ISS framework for stability of nonlinear cascades. SIAM J. Control Optim. 40(6), 1888–1904 (2002)
Jayawardhana, B., Ryan, E.P., Teel, A.R.: Bounded-energy-input convergent-state property of dissipative nonlinear systems: an iISS approach. IEEE Trans. Autom. Control 55(1), 159–164 (2010)
Xu, D.B., Huang, J., Jiang, Z.P.: Global adaptive output regulation for a class of nonlinear systems with iISS inverse dynamics using output feedback. Automatica 49(7), 2184–2191 (2013)
Wang, J.Z., Yu, J.B., Zhou, Q., Wu, Y.Q.: Global robust output tracking control for a class of cascade nonlinear systems with unknown control directions. Int. J. Comput. Math. 92(5), 939–953 (2015)
Jiang, Z.P., Mareels, I., Hill, D.J., Huang, J.: A unifying framework for global regulation via nonlinear output feedback: from ISS to iISS. IEEE Trans. Autom. Control 49(4), 549–562 (2004)
Wu, Y.Q., Yu, J.B., Zhao, Y.: Further results on global asymptotic regulation control for a class of nonlinear systems with iISS inverse dynamics. IEEE Trans. Autom. Control 56(4), 941–946 (2011)
Wu, Y.Q., Yu, J.B., Zhao, Y.: Output feedback regulation control for a class of cascade nonlinear systems and its application to fan speed control. Nonlinear Anal. Real World Appl. 13(3), 1278–1291 (2012)
Yu, X., Wu, Y., Xie, X.: Reduced-order observer-based output feedback regulation for a class of nonlinear systems with iISS inverse dynamics. Int. J. Control 85(12), 1942–1951 (2012)
Yu, X., Liu, G.H.: Output feedback control of nonlinear systems with uncertain ISS/iISS supply rates and noises. Nonlinear Anal. Model. Control 19(2), 286–299 (2014)
Khalil, H.K., Praly, L.: High-gain observers in nonlinear feedback control. Int. J. Robust Nonlinear Control 24(6), 993–1015 (2014)
Nazrulla, M., Khalil, H.K.: Robust stabilization of nonminimum phase nonlinear systems using extended high-gain observers. IEEE Trans. Autom. Control 56(4), 802–813 (2011)
Han, J.Q.: From PID to active disturbance rejection control. IEEE Trans. Ind. Electr. 56(3), 900–906 (2009)
Yao, J.Y., Jiao, Z.X., Ma, D.W.: Output feedback robust control of direct current motors with nonlinear friction compensation and disturbance rejection. ASME J. Dyn. Syst. Meas. Control 137(4), 041004 (2015)
Guo, B.Z., Zhao, Z.L.: On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control Lett. 60(6), 420–430 (2011)
Mobayen, S.: Finite-time tracking control of chained-form nonholonomic systems with external disturbances based on recursive terminal sliding mode method. Nonlinear Dyn. 80(1), 669–683 (2015)
Bayat, F., Mobayen, S., Javadi, S.: Finite-time tracking control of nth-order chained-form nonholonomic systems in the presence of disturbances. ISA Trans. 63(7), 78–83 (2016)
Zhang, C.L., Yang, J., Li, S.H., Yang, N.: A generalized active disturbance rejection control method for nonlinear uncertain systems subject to additive disturbance. Nonlinear Dyn. 83(4), 2361–2372 (2015)
Chen, W.H.: Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mech. 9(4), 706–710 (2004)
Yang, J., Chen, W.H., Li, S.H.: Nonlinear disturbance observer-based robust control for systems with mismatched disturbances/uncertainties. IET Control Theory Appl. 51, 2053 (2011)
Sun, H.B., Guo, L.: Composite adaptive disturbance observer based control and backstepping method for nonlinear system with multiple mismatched disturbances. J. Frank. Inst. 351(2), 1027–1041 (2014)
Wei, X.J., Chen, N., Li, W.Q.: Composite adaptive disturbances observer based control for a class of nonlinear systems with multisources disturbance. Int. J. Adapt. Control Signal Process. 27(3), 199–208 (2013)
Mohammadi, A., Tavakoli, M., Marquez, H.J., Hashemzadeh, F.: Nonlinear disturbance observer design for robotic manipulators. Control Eng. Pract. 21(3), 253–267 (2013)
Liu, Y.G.: Global asymptotic regulation via time-varying output feedback for a class of uncertain nonlinear systems. SIAM J. Control Optim. 51(6), 4318–4342 (2013)
Freeman, R.A.: Kokotovi\(\acute{c}\), P.V.: Robust Nonlinear Control Design. MA:Birkhauser, Boston (1996)
Xi, Z.R., Feng, G., Jiang, Z.P., Cheng, D.Z.: Output feedback exponential stabilization of uncertain chained systems. J. Frank. Inst. 344(1), 36–57 (2007)
Ikeda, M., Maeda, H., Kodama, S.: Stabilization of linear systems. SIAM J. Control Optim. 10(4), 716–729 (1972)
Wang, C.N., Chu, R.T., Ma, J.: Controlling a chaotic resonator by means of dynamic track control. Complexity 21(1), 370–378 (2015)
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grants 61673243, 61304008 and 61520106009.
Author information
Authors and Affiliations
Corresponding author
Appendix: Proof of Proposition 1
Appendix: Proof of Proposition 1
From \(\dot{\overbrace{P^{-1}(t)}}=-P^{-1}(t)\dot{P}(t)P^{-1}(t)\), by virtue of (18) and (22), we can show that
Given the choice of \(\delta ^*\), by completing the squares, we have
A direct substitution leads to (24).
Rights and permissions
About this article

Cite this article
Wu, K., Yu, J. & Sun, C. Global robust regulation control for a class of cascade nonlinear systems subject to external disturbance. Nonlinear Dyn 90, 1209–1222 (2017). https://doi.org/10.1007/s11071-017-3721-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3721-9