
Abstract
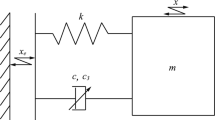
Recently, a few research efforts are made to utilize artificially generated self-excited vibration in several mechanical and micromechanical applications. The present paper considers some important theoretical aspects in connection with the efficacy of the relay-feedback in generating and controlling self-excited oscillation in a class of mechanical systems. The force applied by the relay-feedback is essentially constant and acts in the direction of the measured quantity. Mathematically, an ideal relay-feedback is represented by the signum function of the measured variable. Detailed theoretical analyses, both analytic and numerical, are presented for single, two, and three degrees-of-freedom spring–mass–damper systems under relay-feedback with underactuated, collocated, and noncollocated control configurations. It is shown that relay-feedback, if used in a suitable way, can be effective in selectively generating a particular mode of oscillation in a multi degrees-of-freedom mechanical system. It is also possible to change the mode of oscillation and its amplitude by suitably selecting the control gains.















Similar content being viewed by others

References
Kurita, Y., Muragishi, Y., Yasuda, H.: Self-excited driving of resonance-type vibratory machine by vibration quantity feedback. Trans. Jpn. Soc. Mech. Eng. Ser. C 62, 1691–1696 (1996)
Kurita, Y., Matsumura, Y., Tanaka, A., Hatano, T.: Vibration transportation by cooperation of decentralized self-excited vibratory machines. Trans. Jpn. Soc. Mech. Eng. Ser. C 69, 1191–1196 (2003)
Batako, A.D., Babitsky, V.I., Halliwell, N.A.: A self-excited system of percussive-rotary drilling. J Sound Vib. 259(1), 97–118 (2003)
Babitsky, V.I., Kalashnikov, A.N., Molodtsov, F.V.: Autoresonant control of ultrasonically assisted cutting. Mechatronics 14, 91–114 (2004)
Okajima, T., Sekiguchi, H.: Self-oscillation technique for AFM in liquids. Appl. Surf. Sci. 210, 68–72 (2003)
Yabuno, H., Kaneko, H., Kuroda, M., Kobayashi, T.: Van der Pol type self-excited micro cantilever probe of atomic force microscopy. Nonlinear Dyn. 54, 137–149 (2008)
Kuroda, M., Yabuno, H., Hayashi, K., Ashida, K.: Amplitude control in a van der Pol-type self-excited AFM microcantilever. J. Syst. Des. Dyn. 2(3), 886–897 (2008)
Babitsky, V.I.: Autoresonant mechatronic systems. Mechatronics 5, 483–495 (1995)
Li, C. and He, X. : A bio-mimetic pipe crawling microrobot driven based on self-excited vibration. In: Proceedings of the IEEE, International Conference on Robotics and Biomimetics 15–18 Dec, (2007), Sanya, China.
Ono, K., Takahashi, R., Imadu, A., Shimada, T.: Self-excited walking of a biped mechanism. Int. J. Robotics Res. 20(12), 953–966 (2001)
Ono, K., Furuichi, T., Takahashi, R.: Self-excited walking of a biped mechanism with feet. Int J Robotics Res. 23(1), 55–68 (2004)
Ono, K., Okada, T.: Self-excited vibratory system for a flutter mechanism. Trans. Jpn. Soc. Mech. Eng. Ser. C 41(3), 621–629 (1998)
Lee, Y., Lim, G., Moon, W.: A piezoelectric micro-cantilever bio-sensor using the mass-micro-balancing technique with self-excitation. Microsyst. Technol. 13, 563–567 (2007)
Zook, J.D., Burns, D.W., Herb, W.R., Guckel, H., Kang, J.W., Ahn, Y.: Optically excited self-resonant micro-beams. Sens. Actuators A 52, 92–98 (1996)
Kwasniewski, J., Dominik, I., Lalik, K.: Application of self-oscillating system for stress measurement in metal. J. Vibro-eng. 14(1), 1392–8716 (2012)
Mizuno, T., Yaoita, J., Takeuchi, M., Takasaki, M.: Mass measurement using self-excited oscillations via two-relay controller. IEEE Trans. Autom. Control 54(2), 416–420 (2009)
Kobayashi, T., Oyama, S., Okada, H., Makimoto, N., Tanaka, K., Itoh1, T. and Maeda, R.: An electrostatic field sensor driven by self-excited vibration of sensor/actuator integrated piezoelectric micro cantilever. MEMS 2012, Paris, 29 Jan– 2 Feb (2012).
Ono, K., Okada, T.: Self-Excited vibratory actuator (1st report, analysis of two-degree-of- freedom self-excited systems). Trans. JSME(C) 60(577), 92–99 (1994)
Ono, K., Okada, T.: Self-Excited vibratory actuator (2nd report, self-excitation of insect wing model). Trans. JSME(C). 60(578), 117–124 (1994)
Ono, K., Okada, T.: Self-Excited vibratory actuator (3rd Report, biped walking mechanism by self-excitation). Trans. JSME(C). 60(579), 125–132 (1994)
Kurita, Y., Muragishi, Y.: Self-excited driving of electromagnetic-type vibratory machine. Trans. Jpn. Soc. Mech. Eng. Ser. C 63(605), 35–40 (1997)
Kurita, Y., Muragishi, Y., Yasuda, H.: Amplitude control using variable feedback gain in self-excited driving vibratory machine. Trans. Jpn. Soc. Mech. Eng. Ser. C 62(598), 1691–1696 (1996)
Hideomi, M., Yutaka, K., Yuichi, M.: Generation and control of self-exited vibration by self-sensing actuator. Dyn. Des. Conf. 2001(7), 1551–1556 (2001)
Lee, S.S. and White, R.M.: Self-excited piezoelectric cantilever oscillators. Proceedings of the 8th International Conference on Solid-State Sensors and Actuators and Eurosensors IX, Stockholm, Sweden, June 25–29 (1995).
Kuroda, M., Yabuno, H., Hayashi, K., Ashida, K.: Amplitude control in a van der Pol-type self-excited AFM microcantilever. J. Syst. Des. Dyn. 2(3), 886–897 (2008)
Chatterjee, S., Malas, A.: On the stiffness-switching methods for generating self-excited oscillations in simple mechanical systems. J. Sound Vib. 331, 1742–1758 (2012)
Aguilar, L.T., Boiko, I., Fridman, L., Iriarte, R.: Generating self-excited oscillations for underactuated mechanical systems via two-relay controller. Int. J. Control 82(9), 1678–1691 (2009)
Gelb, A., Vander Velde, W.E.: MuiltipleInput Describing Functions and Nonlinear System Design. MaGraw Hill Book Company, New York (1972)
Author information
Authors and Affiliations
Corresponding author
Appendix 1
Appendix 1
The coefficients \(a_{1}\), \(a_{2}\), \(a_{3}\), \(a_{4}\), \(a_{5}\), and \(a_{6}\) used in Eq. (67) are given as follows:
\(a_{0}\) = \(\pi \alpha _{1}\alpha _{2}\),
where
The coefficients used in Eq. (69) are given as follows:
Rights and permissions
About this article
Cite this article
Malas, A., Chatterjee, S. Generating self-excited oscillation in a class of mechanical systems by relay-feedback. Nonlinear Dyn 76, 1253–1269 (2014). https://doi.org/10.1007/s11071-013-1208-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1208-x