
Abstract
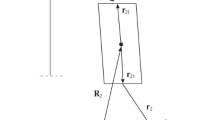
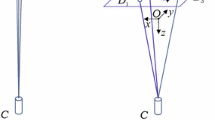
This paper presents a dynamic analysis of a tethered satellite system with a moving mass. A dynamic model with four degrees of freedom, i.e., a two-piece dumbbell model, is established for tethered satellites conveying a mass between them along the tether length. This model includes two satellites and a moving mass, treated as particles in a single orbital plane, which are connected by massless, straight tethers. The equations of motion are derived by using Lagrange’s equations. From the equations of motion, the dynamic response of the system when the moving mass travels along the tether connecting the two satellites is computed and analyzed. We investigate the global tendencies of the libration angle difference (between the two sections of tether) with respect to the changes in the system parameters, such as the initial libration angle, size (i.e. mass) of the moving mass, velocity of the moving mass, and tether length. We also present an elliptic orbit case and show that the libration angles and their difference increase as orbital eccentricity increases. Finally, our results show that a one-piece dumbbell model is qualitatively valid for studying the system under certain conditions, such as when the initial libration angles, moving mass velocity, and moving mass size are small, the tether length is large, and the mass ratio of the two satellites is large.
















Similar content being viewed by others
References
Kirchgraber, U., Manz, U., Stoffer, D.: Rigorous proof of chaotic behaviour in a dumbbell satellite model. J. Math. Anal. Appl. 251(2), 897–911 (2000)
Cho, S., Lovell, T.A., Cochran, J.E., Cicci, D.A.: Approximate solutions for tethered satellite motion. J. Guid. Control Dyn. 24(4), 746–754 (2001)
Nakanishi, K., Kojima, H., Watanabe, T.: Trajectories of in-plane periodic solutions of tethered satellite system projected on van der Pol planes. Acta Astronaut. 68(7–8), 1024–1030 (2011)
Mantri, P., Mazzoleni, A.P., Padgett, D.A.: Parametric study of deployment of tethered satellite systems. J. Spacecr. Rockets 44(2), 412–424 (2007)
Williams, P.: Libration control of tethered satellites in elliptical orbits. J. Spacecr. Rockets 43(2), 476–479 (2006)
Wen, H., Jin, D.P., Hu, H.Y.: Advances in dynamics and control of tethered satellite systems. Acta Mech. Sin. 24(3), 229–241 (2008)
Steindl, A., Troger, H.: Optimal control of deployment of a tethered subsatellite. Nonlinear Dyn. 31(3), 257–274 (2003)
Wen, H., Jin, D.P., Hu, H.Y.: Optimal feedback control of the deployment of a tethered subsatellite subject to perturbations. Nonlinear Dyn. 51(4), 501–514 (2008)
Jin, D.P., Hu, H.Y.: Optimal control of a tethered subsatellite of three degrees of freedom. Nonlinear Dyn. 46(1–2), 161–178 (2006)
Williams, P.: Deployment/retrieval optimization for flexible tethered satellite systems. Nonlinear Dyn. 52(1–2), 159–179 (2008)
Cohen, S.S., Misra, A.K.: The effect of climber transit on the space elevator dynamics. Acta Astronaut. 64(5–6), 538–553 (2009)
Woo, P., Misra, A.K.: Dynamics of a partial space elevator with multiple climbers. Acta Astronaut. 67(7–8), 753–763 (2010)
Williams, P., Ockels, W.: Climber motion optimization for the tethered space elevator. Acta Astronaut. 66(9–10), 1458–1467 (2010)
Steindl, A., Troger, H.: Is the sky-hook configuration stable? Nonlinear Dyn. 40(4), 419–431 (2005)
Fujii, H.A., Watanabe, T., Kusagaya, T., Sato, D., Ohta, M.: Dynamics of a flexible space tether equipped with a crawler mass. J. Guid. Control Dyn. 31(2), 436–440 (2008)
Kojima, H., Sugimoto, Y., Furukawa, Y.: Experimental study on dynamics and control of tethered satellite systems with climber. Acta Astronaut. 69(1–2), 96–108 (2011)
Acknowledgements
This work was supported by a National Research Foundation of Korea (NRF) grant funded by the Korea government (MEST) (No. 2011-0017408).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The mass matrix of (17) is a 4×4 matrix given by
where
The nonlinear internal force vector of (17) is a 4×1 column vector given by
where
Rights and permissions
About this article
Cite this article
Jung, W., Mazzoleni, A.P. & Chung, J. Dynamic analysis of a tethered satellite system with a moving mass. Nonlinear Dyn 75, 267–281 (2014). https://doi.org/10.1007/s11071-013-1064-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1064-8