
Abstract
Gear tooth root crack, as one of the popular gear tooth failures, is always caused by the dynamic load or excessive load applied to the tooth. It will devastate the working performance of the gear system, by problems such as vibration and noise, or even lead to a broken tooth, which will stop the normal working process of the gear system. It has attracted wide attention from researchers. However, the previous studies focused their concentration only on the mesh stiffness reduction due to tooth root crack, while the tooth plastic inclination due to tooth bending damages like gear tooth root crack is seldom considered. In this paper, a tooth plastic inclination model for spur gear with tooth root crack is developed by regarding the cracked tooth as a cantilever beam. It influences not only the displacement excitation but also the mesh stiffness and load-sharing factor among tooth pairs in mesh. The simulation results obtained by incorporating the tooth plastic inclination deformation model together with the tooth root crack model into a 21-Degree-of-Freedom planetary gear dynamic model indicate that the tooth plastic inclination has a significant effect on the performance of the gear system rather than the mesh stiffness reduction due to tooth root crack.











Similar content being viewed by others

References
Wu, S., Zuo, M.J., Parey, A.: Simulation of spur gear dynamics and estimation of fault growth. J. Sound Vib. 317, 608–624 (2008)
Chen, Z., Shao, Y.: Mesh stiffness calculation of a spur gear pair with tooth profile modification and tooth root crack. Mech. Mach. Theory 62, 63–74 (2013)
Wang, J., Howard, I.: The torsional stiffness of involute spur gears. Proc. Inst. Mech. Eng., Part C, J. Mech. Eng. Sci. 218, 131–142 (2004)
Tamminana, V.K., Kahraman, A., Vijayakar, S.: A study of the relationship between the dynamic factors and the dynamic transmission error of spur gear pairs. J. Mech. Des. 129, 75–84 (2007)
Chen, Z., Shao, Y.: Dynamic features of planetary gear system with tooth crack under different sizes and inclination angles. J. Vib. Acoust. 135(3), 031004 (2013)
Litak, G., Friswell, M.I.: Dynamics of a gear system with faults in meshing stiffness. Nonlinear Dyn. 41, 415–421 (2005)
Li, B., Zhang, P., Wang, Z., Mi, S., Liu, P.: Morphological covering based generalized dimension for gear fault diagnosis. Nonlinear Dyn. 67, 2561–2571 (2012)
Hou, S., Li, Y.: Detecting nonlinearity from a continuous dynamic system based on the delay vector variance method and its application to gear fault identification. Nonlinear Dyn. 60(1–2), 141–148 (2010)
Lewicki, D.G., Ballarini, R.: Effect of rim thickness on gear crack propagation path. NASA Technical Memorandum 107229, Army Research Laboratory, Technical Report aRL-TR-1110 (1996)
Lewicki, D.G., Spievak, L.E., Wawrzynek, P.A.: Consideration of moving tooth load in gear crack propagation predictions. NASA/TM-2000-210227 (2000)
Tian, X.H.: Dynamic simulation for system response of gearbox including localized gear faults. Master’s thesis, University of Alberta, Edmonton, Alberta, Canada (2004)
Yang, D.C.H., Lin, J.Y.: Hertzian damping, tooth friction and bending elasticity in gear impact dynamics. J. Mech. Transm. Autom. Des. 109(2), 189–196 (1987)
Chen, Z., Shao, Y.: Dynamic simulation of spur gear with tooth root crack propagating along tooth width and crack depth. Eng Fail. Anal. 18, 2149–2164 (2011)
Chaari, F., Fakhfakh, T., Haddar, M.: Analytical modelling of spur gear tooth crack and influence on gearmesh stiffness. Eur. J. Mech. A, Solids 28, 461–468 (2009)
Li, C.J., Lee, H., Choi, S.H.: Estimating size of gear tooth root crack using embedded modeling. Mech. Syst. Signal Process. 16(5), 841–852 (2002)
Li, C.J., Lee, H.: Gear fatigue crack prognosis using embedded-dynamic-fracture model, gear dynamic model and fracture mechanics. Mech. Syst. Signal Process. 19, 836–846 (2005)
Mark, W.D., Reagor, C.P., McPherson, D.R.: Assessing the role of plastic deformation in gear-health monitoring by precision measurement of failed gears. Mech. Syst. Signal Process. 21, 177–192 (2007)
Mark, W.D., Reagor, C.P.: Static-transmission-error vibratory-excitation contributions from plastically deformed gear teeth caused by tooth bending-fatigue damage. Mech. Syst. Signal Process. 21, 885–905 (2007)
Chaari, F., Fakhfakh, T., Haddar, M.: Dynamic analysis of a planetary gear failure caused by tooth pitting and cracking. J. Fail. Anal. Prev. 2, 73–78 (2006)
Dhanasekaran, R., Kumar, P.S., Santhi, K.: Crack failure of planetary gearbox sun gear. Int. J. Recent Trends Eng. Technol. 3(6), 12–14 (2010)
Wu, X., Meagher, J., Sommer, A.: A differential planetary gear model with backlash and teeth damage. In: Rotating Machinery, Structural Health Monitoring, Shock and Vibration. Conference Proceedings of the Society for Experimental Mechanics Series, vol. 5, p. 8 (2011)
Chen, Z., Shao, Y.: Dynamic simulation of planetary gear with tooth root crack in ring gear. Eng Fail. Anal. 31, 8–18 (2013)
BS ISO 6336-3:2006. Calculation of load capacity of spur and helical gears, part 3: calculation of tooth bending strength
Chaari, F., Fakhfakh, T., Hbaieb, R., et al.: Influence of manufacturing errors on the dynamical behavior of planetary gear. Int. J. Adv. Manuf. Technol. 27, 738–746 (2006)
Acknowledgements
The authors are grateful for the financial support provided by the National Natural Science Key Foundation of China under Contract No. 51035008.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
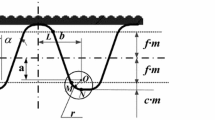
The plastic inclination deformation of a cracked tooth is schematically illustrated in Fig. 1. The solid tooth profile indicates no plastic inclination deformation and the dashed tooth profile exhibits a plastic inclination deformation. Normally, the tooth pair meshes at point E with respect to the angle α 10 when there is no plastic inclination deformation. When a plastic inclination deformation θ p around the origin o of the local coordinate system xoy happens, point E′ on the undeformed tooth profile corresponding to the angle α 1 will move to E″ on the LOA where the tooth pair meshes at. Here, the LOA is along line EF which is tangent to the base circle with radius R b . The angle between line OF and the tooth shape center line OG is represented by α 10 which becomes α 1 when LOA is through point E′. The symbol α or is the central angle of the arc between the tangent point of the tooth root fillet circle and the tooth profile and the intersection point of line OOr and the dedendum circle. The point M is the intersection point of involute curve and the base circle. α 2 indicates the angle between lines OM and OG. The goal of this appendix is to derive the distance of the mesh points E and E″ along LOA, namely δ EE″.
According to the geometric relationship shown in Fig. 1, the coordinates of the points Or, A, B, D and o in the general coordinate system XOY can be derived, which are illustrated as follows.
The coordinates of point Or, X Or and Y Or , are
where
where the symbol r is the radius of the tooth root fillet. R f is the radius of the dedendum circle.
Similarly, the coordinates (X i ,Y i ) i=A,B,D,o of the points A, B, D and o can be obtained based on the geometric relationship shown in Fig. 1, which are not shown here. Points D and A are symmetric about tooth center line OG. And the origin point of the local coordinate system xoy coincides with the point o which is the middle point of line section BD.
And the rotational angle of the local coordinate system relative to the general coordinate system, namely the acute angle between the x axis and the X axis in local and general coordinate system, respectively, can be calculated as,
With the general coordinates of point o and θ 0 in Eq. (13), the coordinates of all the points can be switched between the general coordinate system XOY and the local coordinate system xoy.
The coordinates (X E′,Y E′) of the point E′ on the involute tooth profile can be calculated as
Transformation of the coordinates (X E′,Y E′) of point E′ in XOY to that (x E′,y E′) in xoy yields,
When tooth plastic inclination deformation happens, the tooth rotates around point o by θ p . At this time, point E′ moves to point E″ whose coordinates (x E″,y E″) in xoy are represented as
Then, the general coordinate of point E″ (X E″,Y E″) can be obtained by transformation from its local coordinates.
The point E″ are just on the line EF, so its general coordinates should meet the equation representing the line EF, which is denoted as
Given a value of α 10 with respect to the ideal mesh point E, a fixed value of the unknown α 1 could be searched. Thus, the coordinates of the point E″ (X E″,Y E″) in the general coordinate system XOY can be obtained.
The coordinates of the ideal mesh position (point E) (X E ,Y E ) in the coordinate system XOY can be calculated based on Eq. (14a) and (14b) by substitution of α 1 with α 10.
Consequently, the distance δ EE″ between the ideal mesh position (point E) and the actual mesh position (point E″) when the tooth is plastically deformed is obtained as
Rights and permissions
About this article
Cite this article
Shao, Y., Chen, Z. Dynamic features of planetary gear set with tooth plastic inclination deformation due to tooth root crack. Nonlinear Dyn 74, 1253–1266 (2013). https://doi.org/10.1007/s11071-013-1038-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1038-x