
Abstract
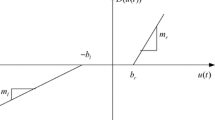
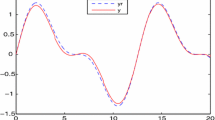
In this paper, we present an adaptive control scheme for a class of uncertain nonlinear system with unknown nonsymmetric dead-zone nonlinearity. It is assumed that the system states are unmeasurable. Therefore, an observer is designed to estimate those unmeasured states. The controller is designed by using the backstepping control design procedure. The proposed adaptive scheme requires only the information that the dead-zone slopes are bounded. The new control scheme ensures bounded-error trajectory tracking and the boundedness of all the signals in the closed-loop. The feasibility is investigated by an illustrative simulation example.
Similar content being viewed by others

References
Zhou, J., Wen, C., Zhang, Y.: Adaptive output control of nonlinear systems with uncertain dead zone nonlinearity. IEEE Trans. Autom. Control 51(3), 504–511 (2006)
Zhou, J.: Decentralized adaptive control for large-scale time-delay systems with dead-zone input. Automatica 44, 1790–1799 (2008)
Ibrir, S., Xie, W.F., Su, C.Y.: Adaptive tracking of nonlinear systems with non-symmetric dead-zone input. Automatica 43(3), 522–530 (2007)
Wang, X.S., Hong, H., Su, C.Y.: Model reference adaptive control of continuous-time systems with an unknown input dead-zone. IEEE Proc. Control Theory Appl. 150(3), 261–266 (2003)
Wang, X.S., Su, C.Y., Hong, H.: Robust adaptive control of a class of nonlinear systems with unknown dead-zone. Automatica 40, 407–413 (2004)
Zhang, H.G., Cai, L.L., Bien, Z.: A fuzzy basis function vector-based multivariable adaptive fuzzy controller for nonlinear systems. IEEE Trans. Syst. Man Cybern. Part B 30(1), 210–217 (2000)
Zhang, H.G., Bien, Z.: Adaptive fuzzy control of MIMO nonlinear systems. Fuzzy Sets Syst. 115(2), 191–204 (2000)
Tong, S.C., Li, H.X.: Fuzzy adaptive sliding-mode control for MIMO nonlinear systems. IEEE Trans. Fuzzy Syst. 11(3), 354–360 (2003)
Kung, C.C., Chen, T.H.: Observer-based indirect adaptive fuzzy sliding mode control with state variable filters for unknown nonlinear dynamical systems. Fuzzy Sets Syst. 155, 292–308 (2005)
Liu, Y.J., Wang, W.: Adaptive fuzzy control for a class of uncertain nonaffine nonlinear systems. Inf. Sci. 177(18), 3901–3917 (2007)
Tong, S.C., He, X.L., Zhang, H.G.: A Combined backstepping and small-gain approach to robust adaptive fuzzy output feedback control. IEEE Trans. Fuzzy Syst. 17(5), 1059–1069 (2009)
Chen, W.S., Jiao, L.C., Li, J., Li, R.H.: Adaptive NN backstepping output-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Trans. Syst. Man Cybern. Part B, Cybern. 40(3), 939–950 (2010)
Liu, Y.J., Tong, S.C., Wang, W.: Adaptive fuzzy output tracking control for a class of uncertain nonlinear systems. Fuzzy Sets Syst. 160(19), 2727–2754 (2009)
Liu, Y.J., Wang, W., Tong, S.C., Liu, Y.S.: Robust adaptive tracking control for nonlinear systems based on bounds of fuzzy approximation parameters. IEEE Trans. Syst. Man Cybern. Part A, Syst. Hum. 40(1), 170–184 (2010)
Li, T.S., Wang, D., Feng, G., Tong, S.C.: A DSC approach to robust adaptive NN tracking control for strict-feedback nonlinear systems. IEEE Trans. Syst. Man Cybern. Part B, Cybern. 40(3), 915–927 (2010)
Li, T.S., Tong, S.C., Feng, G.: A novel robust adaptive-fuzzy-tracking control for a class of nonlinear multi-input/multi-output systems. IEEE Trans. Fuzzy Syst. 18(1), 150–160 (2010)
Wang, Z.H., Zhang, Y., Fang, H.: Neural adaptive control for a class of nonlinear systems with unknown dead zone. Neur. Comput. Appl. 17, 339–345 (2008)
Selmis, R.R., Lewis, F.L.: Dead-zone compensation in motion control systems using neural networks. IEEE Trans. Autom. Control 45, 602–613 (2000)
Liu, Y.J., Zhou, N.: Observer-based adaptive fuzzy-neural control for a class of uncertain nonlinear systems with unknown dead-zone input. ISA Trans. 49(4), 462–469 (2010)
Huang, Y.S., Zhou, D.Q., Xiao, S.P., Lin, D.: Coordinated decentralised hybrid adaptive output feedback fuzzy control for a class of large-scale non-linear systems with strong interconnections. IET Control Theory Appl. 3(9), 1261–1274 (2009)
Huang, Y.S., Zhou, D.Q., Chen, X.X.: Decentralized direct adaptive output feedback fuzzy H ∞ tracking design of large-scale nonaffine nonlinear systems. Nonlinear Dyn. 58(1–2), 153–167 (2009)
Lin, D., Wang, X.Y.: Observer-based decentralized fuzzy neural sliding mode control for interconnected unknown chaotic systems via network structure adaptation. Fuzzy Sets Syst. 161(15), 2066–2080 (2010)
Boulkroune, A., Tadjine, M., MSaad, M., Farza, M.: How to design a fuzzy adaptive controller based on observers for uncertain affine nonlinear systems. Fuzzy Sets Syst. 159(8), 926–948 (2008)
Li, Z.J., Xu, C.Q.: Adaptive fuzzy logic control of dynamic balance and motion for wheeled inverted pendulums. Fuzzy Sets Syst. 160(12), 1787–1803 (2009)
Li, Z.J.: Adaptive neural-fuzzy control of uncertain constrained multiple coordinated nonholonomic mobile manipulators. Eng. Appl. Artif. Intell. 21(7), 985–1000 (2008)
Li, Z.J.: Adaptive robust dynamic balance and motion controls of mobile wheeled inverted pendulums. IEEE Trans. Control Syst. Technol. 17(1), 233–241 (2009)
Chen, W.S., Li, J.M.: Decentralized output-feedback neural control for systems with unknown interconnections. IEEE Trans. Syst. Man Cybern. Part B, Cybern. 38(1), 258–266 (2008)
Chen, W.S., Jiao, L.C.: Adaptive tracking for periodically time-varying and nonlinearly parameterized systems using multilayer neural networks. IEEE Trans. Neur. Netw. 21(2), 345–351 (2010)
Wang, Z.S., Zhang, H.G.: Global asymptotic stability of reaction–diffusion Cohen–Grossberg neural networks with continuously distributed delays. IEEE Trans. Neur. Netw. 21(1), 39–49 (2010)
Wang, Z.S., Zhang, H.G., Yu, W.: Robust stability of Cohen–Grossberg neural networks via state transmission matrix. IEEE Trans. Neur. Netw. 20(1), 169–174 (2009)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhou, N., Liu, YJ. & Tong, SC. Adaptive fuzzy output feedback control of uncertain nonlinear systems with nonsymmetric dead-zone input. Nonlinear Dyn 63, 771–778 (2011). https://doi.org/10.1007/s11071-010-9836-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-010-9836-x