
Abstract
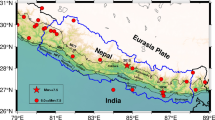
The purpose of this article is to study the three-parameter (scale, shape, and location) generalized exponential (GE) distribution and examine its suitability in probabilistic earthquake recurrence modeling. The GE distribution shares many physical properties of the gamma and Weibull distributions. This distribution, unlike the exponential distribution, overcomes the burden of memoryless property. For shape parameter β> 1, the GE distribution offers increasing hazard function, which is in accordance with the elastic rebound theory of earthquake generation. In the present study, we consider a real, complete, and homogeneous earthquake catalog of 20 events with magnitude above 7.0 (Yadav et al. in Pure Appl Geophys 167:1331–1342, 2010) from northeast India and its adjacent regions (20°–32°N and 87°–100°E) to analyze earthquake inter-occurrence time from the GE distribution. We apply the modified maximum likelihood estimation method to estimate model parameters. We then perform a number of goodness-of-fit tests to evaluate the suitability of the GE model to other competitive models, such as the gamma and Weibull models. It is observed that for the present data set, the GE distribution has a better and more economical representation than the gamma and Weibull distributions. Finally, a few conditional probability curves (hazard curves) are presented to demonstrate the significance of the GE distribution in probabilistic assessment of earthquake hazards.







Similar content being viewed by others


References
Akaike H (1974) A new look at the statistical model identification. IEEE Trans Auto Control 19(6):716–723
Aldrich J (1997) RA Fisher and the making of maximum likelihood 1912–1922. Statist Sci 12(3): 162–176
Anagnos T, Kiremidjian AS (1988) A review of earthquake occurrence models for seismic hazard analysis. Probab Eng Mech 3(1):1–11
Bak P, Christensen K, Danon L, Scanlon T (2002) Unified scaling law for earthquakes. Phys Rev Lett 88(17):178501–178504
Baker JW (2008) An introduction to probabilistic seismic hazard analysis. http://www.stanford.edu/~bakerjw/Publications/Baker_(2008)_Intro_to_PSHA_v1_3.pdf. Accessed on 25 July 2013
Bilham R, England P (2001) Plateau pop-up during the 1897 earthquake. Nature 410:806–809
BIS (2002) IS 1893 (part 1)–2002: Indian standard criteria for earthquake resistant design of structures, part I—general provisions and buildings. Bureau of Indian Standards, New Delhi
Chen C, Wang JP, Wu YM, Chan CH (2013) A study of earthquake inter-occurrence distribution models in Taiwan. Nat Hazards 69(3):1335–1350
Cornell CA, Winterstein S (1986) Applicability of the Poisson earthquake occurrence model. Seismic Hazard Methodology for the Central and Eastern United States, EPRI Research Report, p 101
Dionysiou DD, Papadopoulos GA (1992) Poissonian and negative binomial modeling of earthquake time series in the Aegean area. Phys Earth Planet Inter 71:154–165
Faenza L, Marzocchi W, Serretti P, Boschi E (2008) On the spatio-temporal distribution of M 7.0 + worldwide seismicity. Tectonophysics 449:97–104
Gupta RD, Kundu D (1999) Generalized exponential distributions. Aust N Z J Stat 41(2):173–188
Gupta RD, Kundu D (2007) Generalized exponential distributions: existing theory and recent developments. J Stat Plan Inference 137(11):3537–3547
Gupta HK, Rajendran K, Singh HN (1986) Seismicity of the northeast India region: Part I: the data base. J Geol Soc India 28:345–365
Gupta RC, Gupta PL, Gupta RD (1998) Modeling failure time data by Lehmann alternatives. Comm Statist Theory Methods 27:887–904
Johnson NL, Kotz S, Balakrishnan N (1995) Continuous univariate distributions, 2nd edn. Wiley, New York, vol 2, p 756
Kagan YY, Jackson DD (1991) Long-term earthquake clustering. Geophys J Int 104:117–133
Kagan YY, Schoenberg F (2001) Estimation of the upper cutoff parameter for the tapered Pareto distribution. J Appl Prob 38A:158–175
Kayal JR (1996) Earthquake source process in Northeast India: a review. Him Geol 17:53–69
Kijko A, Sellevoll MA (1981) Triple exponential distribution, a modified model for the occurrence of large earthquakes. Bull Seism Soc Am 71:2097–2101
Matthews MV, Ellsworth WL, Reasenberg PA (2002) A Brownian model for recurrent earthquakes. Bull Seism Soc Am 92(6):2233–2250
Molnar P, Pandey MR (1989) Rupture zones of the great earthquakes in the Himalayan region. Proc Indian Acad Sci, Earth Planet Sci 98(1):61–70
Nandy DR (1986) Tectonics, seismicity and gravity of North eastern India and adjoining region. Geol Surv India Memoir 119:13–16
Nishenko S, Buland R (1987) A generic recurrence interval distribution for earthquake forecasting. Bull Seism Soc Am 77:1382–1389
Oldham RD (1899) Report on the great earthquake of 12 June 1897. Memory Geol Soc India, Geol Surv India 29:379
Parvez IA, Ram A (1997) Probabilistic assessment of earthquake hazards in the north-east Indian peninsula and Hindukush regions. Pure Appl Geophys 149:731–746
Pasari S, Dikshit O (2013) Impact of three-parameter Weibull models in probabilistic assessment of earthquake hazards. Pure Appl Geophys. doi:10.1007/s00024-013-0704-8
Poddar MC (1950) The Assam earthquake of 15th August 1950. Indian Miner 4:167–176
Raqab MZ, Ahsanullah M (2001) Estimation of the location and scale parameters of generalized exponential distribution based on order statistics. J Stat Comput Simul 69:104–124
Reid HF (1910) The mechanics of the earthquake, the California earthquake of April 18, 1906. Report of the State Investigation Commission, Carnegie Institution of Washington, Washington, Vol. 2
Rikitake T (1976) Recurrence of great earthquakes at subduction zones. Tectonophysics 35:305–362
SSHAC (Senior Seismic Hazard Analysis Committee), Recommendations for probabilistic seismic hazard analysis: guidance on uncertainty and use of experts (1997). US Nuclear Regulatory Commission Report. CR-6372, Washington, DC, p 888
Thingbaijam KKS, Nath SK, Yadav A, Raj A, Walling MY, Mohanty WK (2008) Recent seismicity in northeast India and its adjoining region. J Seism 12:107–123
Utsu T (1984) Estimation of parameters for recurrence models of earthquakes. Bull Earthq Res Inst Univ Tokyo 59:53–66
Working Group on California Earthquake Probabilities (2008) The uniform California earthquake rupture forecast, Version 2 (UCERF 2): USGS open file rep., 2007–1437 and California geological survey special report 203 (http://pubs.usgs.gov/of/2007/1437/)
Yadav RBS, Bormann P, Rastogi BK, Das MC, Chopra S (2009) A homogeneous and complete earthquake catalog for northeast India and the adjoining region. Seism Res Lett 80(4):609–627
Yadav RBS, Tripathi JN, Rastogi BK, Das MC, Chopra S (2010) Probabilistic assessment of earthquake recurrence in northeast India and adjoining regions. Pure Appl Geophys 167:1331–1342
Yazdani A, Kowsari M (2011) Statistical prediction of the sequence of large earthquakes in Iran. IJE Trans B Appl 24(4):325–336
Acknowledgments
We thank Prof. Debasis Kundu of IIT Kanpur for clarifying many doubts related to the GE distribution. We also thank Dr. R.B.S. Yadav of Kurukshetra University for his suggestions. We are pleased to thank two anonymous reviewers and the editor-in-chief Prof. Thomas Glade for their constructive comments and useful suggestions for improving the present work. Financial support to S.P. by CSIR, India, is duly acknowledged.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
We put α = 1, γ = 0 in (3) for the sake of simplicity. Also, we replace the random variable T by U. Then, the corresponding density function becomes
Let M U (x) denote the moment generating function (mgf). So, by definition
Therefore, the moment generating function M T(x) of T(= αU + γ) ∼ GE(α, β, γ) is obtained as
Appendix 2
It is observed in Gupta and Kundu (1999) that g(α) in Eq. (17) is unimodal. Thus, in order to find its maximum value, we differentiate g(α) with respect to α and equate the resultant expression to zero. This yields the following equation in α.
Equation (21) can be solved in various ways, such as numerical techniques (e.g., fixed point iteration and the Newton-Raphson method) or by using any standard one-dimensional non-linear equation solver package. For completeness, we have provided schemes of the fixed point iteration and the Newton-Raphson methods below.
-
(a)
Fixed point iteration
We first write \( g^{{\prime }} \left( \alpha \right) = 0\;{\text{as}}\;h\left( \alpha \right) = \alpha \) where,
Then, we apply the scheme of fixed point iteration as
-
(b)
Newton-Raphson method
Equation (21) can also be solved by the Newton-Raphson scheme for non-linear equation. The scheme is given as
Appendix 3
In the K-S test, we first construct the empirical distribution function H n for n i.i.d. random variables T 1, T 2, ···, T n as
Here, \( I_{{T_{i} \le t}} \) is the indicator function, equals 1 if T i ≤ t, and otherwise equals to 0. This makes H n (t) a step function. Suppose we have two competitive models F and G. Then, the corresponding K-S distances are calculated as
In the above expression, sup t denotes the supremum of the set of distances. If D 1 < D 2, we choose model F; otherwise, we choose model G.
Appendix 4
For simplicity, we assume two competitive models F and G to describe the chi-square criterion. We further assume that \( f\left( {t;\tilde{\theta }} \right)\;{\text{and}}\;g\left( {t;\tilde{\varphi }} \right) \) are the corresponding fitted models of F and G. In the chi-square test, we first divide the range of sample observations into k equal parts and record its observed frequencies. We then compute expected frequencies for all k parts using fitted models. Suppose the observed frequencies are n 1, n 2, …, n k and expected frequencies are \( f_{1} ,f_{2} ,{ \ldots },f_{k} \;{\text{and}}\;g_{1} ,g_{2} ,{ \ldots },g_{k} \) respectively, then we compute the chi-square distances between and {t 1, t 2, …, t n }, \( f\left( {t;\tilde{\theta }} \right) \) and {t 1, t 2, …, t n }, \( g\left( {t;\tilde{\varphi }} \right) \) as
If χ 2f,data < χ 2g,data then we choose model F; otherwise, we choose model G. The same approach can now be extended and used to prioritize a number of competitive models.
Rights and permissions
About this article
Cite this article
Pasari, S., Dikshit, O. Three-parameter generalized exponential distribution in earthquake recurrence interval estimation. Nat Hazards 73, 639–656 (2014). https://doi.org/10.1007/s11069-014-1092-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-014-1092-9