
Abstract
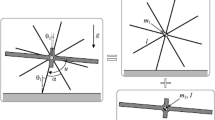
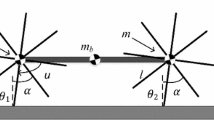
It has been clarified that a passive combined rimless wheel (CRW) that consists of two identical eight-legged rimless wheels can increase the walking speed either by adjusting the phase difference between the fore and rear legs or by using a passive wobbling mass that vibrates up-and-down in the body frame. Toward a further speeding-up of the CRW, this paper investigates the effect of an active wobbling mass driven by an actuator and the effect of an indirect excitation control. First, we develop the mathematical model and numerically show that the CRW generates a walking motion, which is entrained to the up-and-down motion of the active wobbling mass at frequencies higher than the natural frequency of the CRW. We discuss the gait properties mainly from the viewpoints of frequency and phase relationships. Second, we conduct verification experiments using our prototype CRW machine and describe the results.













Similar content being viewed by others

References
McGeer, T.: Passive dynamic walking. Int. J. Robot. Res. 9(2), 62–82 (1990)
Chevallereau, C., Abba, G., Aoustin, Y., Plestan, F., Westervelt, E.R., Canudas-de-Wit, C., Grizzle, J.W.: RABBIT: a testbed for advanced control theory. IEEE Control Syst. Mag. 23(5), 57–79 (2003)
Tedrake, R., Zhang, T.W., Fong, M., Seung, H.S.: Actuating a simple 3D passive dynamic walker. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 4656–4661 (2004)
Remy, C.D., Buffinton, K., Siegwart, R.: Stability analysis of passive dynamic walking of quadrupeds. Int. J. Robot. Res. 29(9), 1173–1185 (2010)
Sugimoto, Y., Yoshioka, H., Osuka, K.: Realization and motion analysis of multi-legged passive dynamic walking. In: Proc. of the SICE Annual Conference, pp. 2790–2793 (2010)
Coleman, M.J., Chatterjee, A., Ruina, A.: Motions of a rimless spoked wheel: a simple three-dimensional system with impacts. Dyn. Stab. Syst. 12(3), 139–159 (1997)
Asano, F.: Stability principle underlying passive dynamic walking of rimless wheel. In: Proc. of the IEEE Int. Conf. on Control Applications, pp. 1039–1044 (2012)
Asano, F.: Efficiency and optimality of two-period limit cycle walking. Adv. Robot. 26(1–2), 155–176 (2012)
Inoue, R., Asano, F., Tanaka, D., Tokuda, I.: Passive dynamic walking of combined rimless wheel and its speeding-up by adjustment of phase difference. In: Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2747–2752 (2011)
Tanaka, D., Asano, F., Tokuda, I.: Gait analysis and efficiency improvement of passive dynamic walking of combined rimless wheel with wobbling mass. In: Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 151–156 (2012)
Ackerman, J., Seipel, J.: Energetics of bio-inspired legged robot locomotion with elastically-suspended loads. In: Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 203–208 (2011)
Rome, L.C., Flynn, L., Goldman, E.M., Yoo, T.D.: Generating electricity while walking with loads. Science 309(5741), 1725–1728 (2005)
Rome, L.C., Flynn, L., Yoo, T.D.: Biomechanics: rubber bands reduce the cost of carrying loads. Nature 444(7122), 1023–1024 (2006)
Pikovsky, A., Rosenblum, M., Kurths, J.: Synchronization: A Universal Concept in Nonlinear Sciences. Cambridge University Press, Cambridge (2003)
Acknowledgements
The authors would like to thank ONO-DENKI CO., LTD. for many helpful suggestions and technical supports in development of the prototype walking machine. They also wish to thank the members of Asano Laboratory at JAIST for supporting the walking experiments.
Author information
Authors and Affiliations
Corresponding author
Appendix A
Appendix A
The details of the matrix M(q) and the vector \(\boldsymbol{h}( \boldsymbol{q}, \dot{\boldsymbol{q}} )\) in (1) are as follows:
Note that we added inertia moments for the fore and rear RWs, I 1 and I 2, as indicated in (29) and (30). This is necessary to calculate M(q)−1 in the derivations of λ and \(\ddot{\boldsymbol{q}}\). After that, for deriving (9), we finally took the limits as I 1→0 and I 2→0.
Rights and permissions
About this article

Cite this article
Asano, F., Tokuda, I. Indirectly controlled limit cycle walking of combined rimless wheel based on entrainment to active wobbling motion. Multibody Syst Dyn 34, 191–210 (2015). https://doi.org/10.1007/s11044-014-9419-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-014-9419-6