
Abstract
This article addresses the estimation of consensus positions in multidimensional coalition formation models. In search of consistency in the model assumptions and inspired by location theory, three types of consensus positions are considered all obtained by minimising a weighted sum of distances to the parties’ ideal policy positions, using respectively the squared Euclidean, Euclidean and rectangular distance functions. Particular attention is payed to inclusion of issue saliences, representing the parties’ policy priorities. Properties, uniqueness and calculation of the corresponding consensus positions are discussed. We investigate in particular the range of consensus positions reachable by each model when saliences are varied.















Similar content being viewed by others

Notes
Several proposals exist for defining also a decrease step starting from some non-optimal ideal position (see e.g. Plastria (2011b)), but in practice these do not seem to be necessary.
The reader should note that this assumption of separability is related, but not identical to the separable saliences we mentioned earlier. Here we are concerned with the differences in position, not the relative importance of the issue dimensions.
References
Benoit K, Laver M (2006) Party policy in modern democracies. Routledge, London
Boekhoorn V, Van Deemen A, Hosli M (2006) A Cooperative Approach to Decision Making in the European Union. In: Thomson R, Stokman F, Achen C, Konig T (eds) The European Union Decides, Cambridge University Press, Cambridge, pp 178–210
De Ridder A, Rusinowska A (2008) On some procedures of forming a multipartner alliance. J Econ Manag Strategy 17(2):443–487
De Vries M (1999) Governing with your closest neighbour: an assessment of spatial coalition formation theories. PhD thesis, Radboud University Nijmegen
Debus M (2009) Pre-electoral commitments and government formation. Public Choice 138(1):45–64
Drezner Z, Klamroth K, Schöbel A, Wesolowsky G (2003) The Weber problem, chap 1. Springer, Berlin, pp 1–36
Francis R, McGinnis L, White J (1992) Facilities layout and location. Prentice Hall, New Jersey
Gärdenfors P (2004) Conceptual spaces: the geometry of thought. The MIT Press, Cambridge
Grofman B (1982) A dynamic model of protocoalition formation in ideological n-space. Behav Sci 27(1): 77–90
Hinich M, Munger M (1997) Anal Politics. Cambridge University Press, Cambridge
Hiriart-Urruty JB, Lemaréchal C (2001) Fundamentals of convex analysis. Springer, Berlin
Juel H, Love R (1981) Fixed point optimality criteria for the location problem with arbitrary norms. J Oper Res Soc 32:891–897
Katz I, Vogl S (2010) A Weiszfeld algorithm for the solution of an asymmetric extension of the generalized fermat location problem. Comput Math Appl 59(1):399–410
Klingemann H, Volkens A, Bara J, Budge I, McDonald M (2006) Mapping policy preferences II: estimates for parties, electors and governments in Eastern Europe, European Union and OECD 1990–2003. Oxford University Press, Oxford
Kuhn H (1973) A note on Fermat’s problem. Math Program 4:98–107
Laver M, Shepsle K (1990) Coalitions and cabinet government. Am Political Sci Rev 84(3):873–890
Milyo J (2000) Logical deficiencies in spatial models: a constructive critique. Public Choice 105(3):273–289
Pelegrin B, Michelot C, Plastria F (1985) On the uniqueness of optimal solutions in continuous location theory. Eur J Oper Res 20:327–331
Plastria F (1992) On destination optimality in asymmetric distance Fermat–Weber problems. Ann Oper Res 40(1):355–369
Plastria F (1995) Continuous location problems. In: Drezner Z (ed) Facility location: a survey of applications and methods. Springer, Berlin, pp 229–266
Plastria F (2011a) Improved fixed point optimality conditions for mixed norms minisum location. TOP Online first. doi:10.1007/s11750-011-0246-0
Plastria F (2011b) The Weiszfeld algorithm: proof, amendments and extensions. In: Eiselt HA, Marianov V (eds) Foundations of location analysis. Springer, Berlin, pp 357–389
Veen T (2011) Positions and salience in European Union politics: estimation and validation of a new dataset. Eur Union Politics 12(2):267–288
Warwick P (2001) Coalition policy in parliamentary democracies: who gets how much and why. Comp Political Stud 34(10):1212–1236
Warwick P (2006) Policy horizons and parliamentary government. Palgrave Macmillan, New York
Weiszfeld E (1937) Sur le point pour lequel la somme des distances de \(n\) points donnés est minimum. Tohoku Math J 43:355–386
Weiszfeld E, Plastria F (2009) On the point for which the sum of the distances to \({n}\) given points is minimum. Ann Oper Res 167:7–41
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
1.1 Hierarchical Coalition Formation Procedures
As mentioned in the introduction, the main difference between hierarchical and non-hierarchical coalition formation models is that in the former, individual parties can form so-called proto-coalitions which act as a single entity in further negotiations. We can easily show that the procedure, followed to reach the final coalition, does not have any impact on the location of the consensus point when using the classical approach of using the gravity center. In this sense, the discussion below is a generalisation of De Ridder and Rusinowska’s (2008) eighth proposition. Let us assume that the parties \(p \in P\) have formed \(l\) proto-coalitions or alliances \(A_k\), with \(k \in 1,\ldots ,l\). Since these alliances will negotiate with one another as single entities, we need to define the required parameters.
The most straightforward parameter is the weight \(w_A\) of an alliance \(A\) which is simply the sum of the weights of all parties \(p \in A\). Alliances’ issue saliences are defined as the weighted average of the member’s issue saliences:
An alliance’s ideal position is then defined as the salience-weighted average of the member’s ideal positions:
Using this definition, we get the consensus position of coalition \(P\)
when we assume that \(P\) is formed by the alliances \(A_k\), with \(k \in 1,\ldots ,l\). Plugging the previous definitions in this equation gives us that
Under the assumption that any \(p\) can only be member of one alliance, namely that \(A_{k} \cap A_{k'} = \emptyset \) with \(k \ne k'\) is true for all \(k\) and \(k' \in 1,\ldots ,l\), we can easily simplify this equation to
which is the salience-weighted gravity center for the coalition \(P\) when assuming that it was formed out of the individual parties \(p \in P\). This implies that the classical consensus estimation method is procedure independent. The consensus location does not change whether or not it is negotiated by individual parties or by alliances that were formed in earlier stages negotiations.
In order to achieve a procedure independent consensus estimation for the sum of squares model, as defined in Eq. 4, we need to use an alternative definition for the alliances’ issue saliences. Substituting Eq. 26 with
gives us the required result.
To avoid over complicating the notation, we assumed in this section that the members of the alliances \(A_1,\ldots ,A_l\) were individual parties. The reader should note that the argument remains valid when these alliances themselves consist of proto-coalitions. The discussion above can then be applied to the earlier stages in the formation procedure.
1.2 Proof of Lemma 5
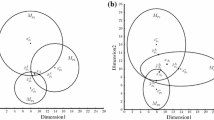
This section provides the proof of Lemma 5, illustrated graphically in Fig. 1.
proof
First let the saliences \(s_{ip}\ge 0\) all be given, satisfying the normalisations (1). By Lemma 1 we know that the corresponding optimal consensus \(x^{SS}\in \textit{BOX}(P)=\textit{BOX}(x_p,x_q)\). We now show that if either \(x^{SS}\in \textit{BOX}(x_p,\bar{x})\) or \(x^{SS}\in \textit{BOX}(x_q,\bar{x})\) then \(x^{SS}=\bar{x}\).
From (4) and (5) we have for all \(i\in I\)
In absence of consensus issues we have for all \(i\in I\) that \(x_{ip}\ne x_{iq}\). In other words the segment \([x_{ip},x_{iq}]\) is always nontrivial and, since \(w_p,w_q>0\), we also have \(\bar{x}_i\not \in \{\ x_{ip},x_{iq}\ \}\).
Defining now
we have
and some calculations allow to check that
Indeed,
Also, evidently, \(\lambda _i \ge 0\), whereas \(\lambda _i \le 1\) if and only if \(s_{iq}^2 \le s_{ip}^2\). We may therefore conclude that \(x^{SS}_{i}\in [x_{ip},\bar{x}_i]\) if and only if \(s_{iq} \le s_{ip}\).
Thus \(x^{SS}\in \textit{BOX}(x_p,\bar{x})\) would mean that \(s_{iq} \le s_{ip}\) for all \(i\in I\), and, since by normalisation we have \(1={\sum _{i\in I}}s_{iq} \le {\sum _{i\in I}}s_{ip} = 1\), this would imply that \(s_{iq} = s_{ip}\) for all \(i\in I\), or \(x^{SS}=\bar{x}\).
Similarly, by inversion of the roles of \(p\) and \(q\) we have that \(x^{SS}\in \textit{BOX}(x_q,\bar{x})\) implies \(x^{SS}=\bar{x}\).
Inversely, given an arbitrary \(y \in SS(P)\), let us construct saliences for which the corresponding optimal consensus \(x^{SS}\) equals \(y\).
The case \(y=\bar{x}\) is simply obtained by setting \(s_{ip}=s_{iq} =1/|I|\) for all \(i\in I\).
In all what follows we may therefore assume that \(y\ne \bar{x}\), which, by definition of \(SS(P)\) also means that \(y\not \in \textit{BOX}(x_p,\bar{x})\) and \(y\not \in \textit{BOX}(x_q,\bar{x})\).
Define then the following pairwise disjoint subsets of \(I\):
Since \(y\in \textit{BOX}(x_p,x_q)\) we have \(I=I_p^0 \cup I_p \cup \bar{I} \cup I_q^0 \cup I_q\).
Consider first \(i\in I_p^0 \cup I_p \cup \bar{I} \), then \(y_i\in [x_{ip},\bar{x}_i]\). It follows that the value \(\lambda _i\) for which \(y_i=(1-\lambda _i)x_{ip}+\lambda _i\bar{x}_i\) satisfies
which is well defined because \(\bar{x}_i-x_{ip}\ne 0\) since \(i\) is not a consensus issue.
According to (33) and (32), the sought saliences yielding equality \(y_i=x^{SS}_i\) should satisfy
On the one hand, in case \(i\in I_p^0 \) we have \(y_i=x_{ip}\), which means that \(\lambda _i=0\), showing that \(s_{iq}=0\) is needed, but then we should also have \(s_{ip}>0\).
On the other hand, when \(i\in I_p \cup \bar{I}\) we have \(\lambda _i>0\) and we may assume \(s_{ip}^2=\mu _i s_{iq}^2\), and this \(\mu _i\) should satisfy
or
where from \(0< \lambda _i \le 1\) one deduces \(\mu _i\ge 1\) and is well-defined. Note that \(i\in \bar{I}\) if and only \(\mu _i= 1\), corresponding to \(s_{ip}=s_{iq}\).
Similarly one finds for \(i\in I_q^0\) that the equality \(y_i=x^{SS}_i\) needs \(s_{ip}=0\), but \(s_{iq}\ne 0\); for \(i\in I_q \cup \bar{I}\) the equality \(y_i=x^{SS}_i\) follows in case \(s_{iq}^2=\mu _i s_{ip}^2\), where
with
showing also that \(y_i\in \bar{I}\) corresponds again to \(\mu _i=1\).
Now set
where
with \(\sigma _p = {\sum _{i\in I_p}}\sqrt{\mu _{i}}\) and \(\sigma _q = {\sum _{i\in I_q}}\sqrt{\mu _{i}}\).
Since \(y\ne \bar{x}\) we are sure that \(|I^0_q|+|I_q|>1\), because otherwise \(y\in BOX{x_p,\bar{x}}\), which was ruled out; similarly we have \(|I^0_p|+|I_p|>1\). Note also that since all \(\mu _i\ge 1\) we always have \(\sigma _p\ge |I_p|\) and \(\sigma _q\ge |I_q|\). Now either \(I^0_q=\emptyset \) or not.
-
In the first case it follows that \(I_q\ne \emptyset \), so there is some \(j\in I_q\), and this means that \(\mu _j>1\), so \(\sigma _q> |I_q|\). Hence \(\sigma _q + |I_q^0| = \sigma _q > |I_q| \).
-
In the second case \(|I_q^0|>0\) holds and we immediately have \(\sigma _q + |I_q^0| > \sigma _q \ge |I_q|\).
Similarly we obtain that \(\sigma _p + |I_p^0| > |I_p| \) always holds. Adding \(|\bar{I}|\) to both sides of these two strict inequalities and multiplying corresponding sides (that are all strictly positive) we find that the denominator of both \(k_p\) and \(k_q\) are strictly positive, as are also their numerators. Therefore both \(k_p\) and \(k_q\) are well-defined and strictly positive.
It follows that for all \(i\in I\) we have \(s_{ip}\ge 0\) and \(s_{iq}\ge 0\) and \(s_{ip}s_{iq}\ne 0\). We can also check that
and similarly \({\sum _{i\in I_p}} s_{iq}=1\), so these numbers may be used as saliences.
Finally the \(s_{ip}\) and \(s_{iq}\) were defined in such a way that
which was shown to yield \(x^{SS}=y\). \(\square \)
1.3 Proof of Lemma 20
This section provides the proof of Lemma 20.
proof
In case \(x_p\ne x_q\) in only one issue \(i\), then evidently for all other issues any SR-consensus must equal the common position, while for issue \(i\) we are in the situation of Lemma 16, which in case of two parties confirms the statement. So we assume further that \(x_p\) and \(x_q\) differ in at least two issues.
Assume first that \(w_p=w_q\).
On the one hand, choosing all saliences equal, i.e. \(s_{ip}=s_{iq}= 1/|I|\), it follows immediately that all points of \(BOX(P)\) consist of issue-wise medians, so each is a SR-consensus.
On the other hand, no non-extreme point \(y\) of \(BOX(P)\) can be a unique SR-consensus, because for some \(i\in I\) we will have \(y_i\in ]x_{ip},x_{iq}[ \) and then any \(y'\in BOX(P)\) defined by \(y'_i \in [x_{ip},x_{iq}] \) and \(y'_j=y_j\) for all \(j\in I\setminus \{\ i\ \}\) also is a SR-consensus. Next, \(y=x_p\) cannot be a unique SR-consensus, since this would mean that for each issue \(i\in I\) \(y_i=x_{ip}\) would be a unique \(i\)-th median, in other words \(w_ps_{ip}>w_qs_{iq}\), or \(s_{ip}>s_{iq}\), which when summed would lead to the impossible \(1= {\sum _{i\in I}} s_{ip}>{\sum _{i\in I}}s_{iq}=1\). By symmetry the same holds of course for \(y=x_q\).
But consider any extreme point \(y\) of \(BOX(P)\) except \(x_p\) and \(x_q\). Then one may split \(I\) into the three subsets \(I_p=\{\ i\in I\ \vert \!\!\vert \ y_i=x_{ip}\ne x_{iq}\ \}\), \(I_q=\{\ i\in I\ \vert \!\!\vert \ y_i=x_{iq}\ne x_{ip}\ \}\) and \(I_= =\{\ i\in I\ \vert \!\!\vert \ y_i=x_{iq}= x_{ip}\ \}\), the two first of which are nonempty since \(y\) differs from \(x_p\) and \(x_q\). Choose then any \(\lambda ,\mu \) with \(0.5<\lambda <1\) and \(0<\mu <1\) in case \(I_=\ne \emptyset \) and otherwise \(\mu =1\), and define
It then follows that for all these positive values we have that if \(I_==\emptyset \), then \(1-\mu =0\), and so
and similarly \( {\sum _{i\in I}}s_{iq}= 1\), so they may be used as saliences. In this case we have for \(i\in I_p\) that \( s_{ip}= \frac{\mu \lambda }{|I_p|} > \frac{\mu (1-\lambda )}{|I_p|} = s_{iq}\), so \(y_i=x_{ip}\) is the only \(i\)-th median, similarly for \(i\in I_q\) the only \(i\)-th median is \(y_i=x_{iq}\) since \(s_{iq} > s_{ip}\), while for \(i\in I_=\) when nonempty the only median is \(y_i=x_{ip} =x_{iq}\). Hence for any such choice of saliences \(y\) is the unique SR-consensus.
Consider now that \(w_p<w_q\) (note that the case \(w_q<w_p\) is similar by inversion between \(p\) and \(q\)).
On the one hand \(y=x_p\) cannot be a SR-consensus, since this would mean that for each issue \(i\in I\) \(y_i=x_{ip}\) would be an \(i\)-th median, in other words \(w_ps_{ip}\ge w_qs_{iq}\), which by summation would lead to \(w_p= {\sum _{i\in I}} w_ps_{ip}\ge {\sum _{i\in I}} w_qs_{iq}=w_q\) contradicting the hypothesis \(w_p<w_q\).
On the other hand choosing all saliences equal, i.e. \(s_{ip}=s_{iq}= 1/|I|\) in view of normalisation, we have \(w_ps_{ip}< w_qs_{iq}\) for any \(i\), so \(y_i=x_{iq}\) is the only \(i\)-th median, and \(y=x_q\) is the only SR-consensus.
Consider then any extreme point \(y\) of \(BOX(P)\) except \(x_p\) and \(x_q\). One may again split \(I\) into the three subsets \(I_p=\{\ i\in I\ \vert \!\!\vert \ y_i=x_{ip}\ne x_{iq}\ \}\), \(I_q=\{\ i\in I\ \vert \!\!\vert \ y_i=x_{iq}\ne x_{ip}\ \}\) and \(I_= =\{\ i\in I\ \vert \!\!\vert \ y_i=x_{iq}= x_{ip}\ \}\), the two first of which are nonempty since \(y\) differs from \(x_p\) and \(x_q\). We start by assuming that \(I_=\) is empty.
Choose first some \(\lambda >1\). It follows that \(0<\frac{w_q-w_p}{\lambda w_q-w_p}<\frac{1}{\lambda }\) and so we may choose \(\mu >0\) so that \(0<\frac{w_q-w_p}{\lambda w_q-w_p}<\mu <\frac{1}{\lambda }\). Note that this implies \(\mu \lambda <1\) and \(w_q-w_p < (\lambda w_q-w_p)\mu \) or \((1-\lambda \mu )w_q < (1-\mu )w_p\). Define now
For all these positive values we have
and
so they may be used as saliences. In this case we have for \(i\in I_p\) that
so \(y_i=x_{ip}\) is the only \(i\)-th median, while for \(i\in I_q\) we have
showing that the only \(i\)-th median is \(y_i=x_{iq}\). Hence for any such choice of saliences \(y\) is the unique SR-consensus.
Finally in case \(I_=\) is not empty, we may consider the set of issues \(I'=I\setminus I_=\) and use the construction above to obtain saliences \(s'_{ip}\) and \(s'_{iq}\) for which the position \(y_i\) is the only \(i\)-th median for all \(i\in I'\). Choosing then any \(0<\sigma <1\) we may define:
that define saliences for which one easily sees that \(y_i\) remains the only \(i\)-th median for all \(i\in I'\), while \(y_i=x_{ip}=x_{iq}\) is the only \(i\)-th median for all \(i\in I_=\). So again we obtain \(y\) as the unique SR-consensus.
As final part we observe that if a position \(z\in BOX(P)\) is not an extreme position, it differs from \(x_p\) in only one issue if and only if \(x_p\) neighbours \(z\). But since the extreme position \(x_p\) is not SR-reachable, Lemma 17 shows that this is equivalent to say that \(z\) is not SR-reachable. \(\square \)
Rights and permissions
About this article
Cite this article
Plastria, F., Blockmans, T. Multidimensional Theoretic Consensus Reachability: The Impact of Distance Selection and Issue Saliences. Group Decis Negot 24, 1–44 (2015). https://doi.org/10.1007/s10726-014-9378-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10726-014-9378-6