
Abstract
We introduce a version of the DICE-2007 model designed for uncertainty analysis. DICE is a wide-spread deterministic integrated assessment model of climate change. Climate change, long-term economic development, and their interactions are highly uncertain. The quantitative analysis of optimal mitigation policy under uncertainty requires a recursive dynamic programming implementation of integrated assessment models. Such implementations are subject to the curse of dimensionality. Every increase in the dimension of the state space is paid for by a combination of (exponentially) increasing processor time, lower quality of the value or policy function approximations, and reductions of the uncertainty domain. The paper promotes a state-reduced, recursive dynamic programming implementation of the DICE-2007 model. We achieve the reduction by simplifying the carbon cycle and the temperature delay equations. We compare our model’s performance and that of the DICE model to the scientific AOGCM models emulated by MAGICC 6.0 and find that our simplified model performs equally well as the original DICE model. Our implementation solves the infinite planning horizon problem in an arbitrary time step. The paper is the first to carefully analyze the quality of the value function approximation using two different types of basis functions and systematically varying the dimension of the basis. We present the closed form, continuous time approximation to the exogenous (discretely and inductively defined) processes in DICE, and we present a numerically more efficient re-normalized Bellman equation that, in addition, can disentangle risk attitude from the propensity to smooth consumption over time.




Similar content being viewed by others
Notes
External forcing from non-CO\(_2\) greenhouse gases is already part of the DICE-1994 model even though it was not taken up in the cited recursive implementations.
The recently released DICE 2013 version mostly contains parametric but not structural updates of the model. We test our main contribution, the simplified climate part of the model as well against DICE-2013.
A subindex indicates the growing or decaying variable. We use \(\delta _A\) instead of \(\delta _{g_A}\) to denote the rate of decrease of the growth rate \(g_A\) of the technology level. A “\(^*\)” marks a “rate” that parametrizes a speed of convergence from an initial to a final growth rate.
We mark two equations below with a prime (\(1'\) and \(3'\)). These are not needed to evaluate the exogenous processes; they can be used to evaluate the discount factor \(\beta _t\) in the renormalized Bellman equation as we explain in Sect. 4.
The growth rate in DICE falls over time. In the original DICE model, the growth rate at the beginning of a decade generates growth throughout the decade, which generates more technological progress then with a smaller (or continuous) time step. The triangles bound this second, technological progress increasing effect by showing DICE’s evolution of the technology level if we used the growth rate at the end of a given decade to generate growth. Similarly, the dots just above and just below the dash-dotted calibration line show the effects of using a decadal time step. The dots just above (below) the line use the growth rate at the beginning (end) of a decade, instead of a continuous model. Together, the additional lines point out that this discretization effect is very minor with respect to the approximation effect of the growth rate, which generates the difference between the calibration line and the original DICE line.
Note that we depict the technology level in terms of labor augmenting technological progress. The equivalent growth rates in terms of total factor productivity, employed in the original DICE model, are lower by the factor \(1-\kappa \) (\(\kappa \) denotes the factor share of capital, see Eq. (9) and the preceding paragraph). Hence, the rounding error is slightly lower when using total factor productivity growth rates, an effect that our triangled curve (and the original DICE curve) take into account.
The general interpretation is more precisely that \(a_1\) is the ratio \(\frac{initial\, cost \, of \, backstop}{initial \, cost \, of \, backstop\,-\,final \, cost \, of \, backstop}\). However, for the employed value of \(2\) both ratios are the same, so we stick with Nordhaus’s interpretation.
Radiative forcing is a measure for the change in the atmospheric energy balance. The reader may think of it as the flame that greenhouse gases turn on to slowly warm the planet over time.
In the usual growth model, non-normalized capital grows without bounds, leaving quickly any finite numerical support. The DICE-2007 model assumes falling growth rates of population and technology level. Thus, in principle, at some point in the very long run future capital converges, but at a level that would marginalize the evolution of capital over the next couple of centuries that are most relevant for present climate policy. The per effective labor normalization implies a well-defined infinite horizon limit on a narrow state space, allowing for a good resolution of both current and future deviations from some steady state level.
For generating time paths we need to evaluate decay and temperature difference on the smaller time step, here, annual. But, already in the function iteration, the numerically optimal grid, e.g. consisting of Chebychev nodes, will not coincide with the decadal information deriving from the original DICE 2007 model.
The DICE model uses \(A_{t+10}^{T\!F\!P}=\frac{A_{t}^{T\!F\!P}}{1-10 g_{A,t}^{T\!F\!P}}\) in total factor productivity units. Using labor augmenting technological progress and picking \(t=0\) we obtain \(A_{10}=\frac{A_{t}}{(1-10 g_{A,t}^{\textit{DICE}}(1-\kappa ))^{\frac{1}{1-\kappa }}}\), where \(g_{A,t}^{\textit{DICE}}=\frac{g_{A,t}^{T\!F\!P}}{1-\kappa }\) is the original DICE model’s initial growth rate when converting into labor augmenting technological growth. Setting this equation for \(A_{10}\) equal to our continuous time expression in Eq. (4) delivers the cited formula for \(g_{A,0}\).
For too low a time preference relative to growth and intertemporal substitutability, the Bellman equation will not contract. Practical convergence problems can already arise before expected welfare diverges and makes the maximization problem theoretically ill-posed. Note that the time dependence of \(\beta _{t,\Delta t}\) is entirely a consequence of the non-constant growth rates and does not imply a time inconsistent objective function.
The error is bounded by the change of the growth rate. A more precise evaluation of the differences results in a truly negligible error for \(g_{A,\tau }\), changing the discount factor in the order 10\(^{-6}\) for an annual time step. The initially quickly growing labor can imply an approximation error in the continuous time formula of up to a percent of the discount factor, i.e., of the order \(10^{-4}\) in the discount factor. That error is still small as opposed to any knowledge we have with respect to the true discount factor, but we can avoid it using equation (\(3^*\)) instead.
In the optimal policy context, we could alternatively calculate the social cost of carbon based on the marginal abatement cost. However, once achieving full abatement, abatement cost no longer captures the social cost of carbon, which is determined by the marginal damages. In our context, the value function based approach conveniently covers the full domain. Without the value function, methods to calculate the corresponding social cost of carbon are generally more cumbersome. A frequently employed method calculates the welfare for the desired scenario, as well as for perturbations with additional CO\(_2\) added in the desired periods. The welfare differences can then be converted into the marginal damages of the additional CO\(_2\) release, and the social cost of a ton of carbon.
Chebychev nodes do not lie on the boundary of the interval. In contrast, splines usually take the boundary of the support interval as an evaluation node, and we have to choose an upper bound strictly smaller but close to unity.
The logarithmic transformation clusters nodes densely in early as opposed to late periods. Such a clustering is useful for the DICE model, where most of the action happens relatively early in the time horizon, when the exogenous processes exhibit the highest rates of change, and when the economy transitions from a high emission to a low emissions path. However, a simple logarithmic transformation would exaggerate such clustering. A low parameter \({\zeta }\) is necessary to moderate the clustering at early times and spread the support to a sufficient range in real time. The parameter \({\zeta }\) is a purely numeric parameter and we chose \({\zeta }=0.02\) for the runs depicted in the appendix. In general, we suggest smaller values rather than increasing the parameter. Sometimes it will be worthwhile playing with the parameter spreading nodes differently in order to improve the value function fit or even convergence properties.
A simple and efficient basis for a multi-dimensional state space is the tensor basis. It contains the tensor product of all combinations of basis functions in the different dimensions. The corresponding grid and basis is automatically generated when using the compecon toolbox. Sometimes, it is suggested to drop higher order cross terms as a way of saving basis functions or nodes. The loss in approximation quality of this approach strongly depends on the precise form of the value function.
If we have a solution to the 4 state model for a related scenario, we obtain a very good initial guess for the 3 state problem by evaluating the 4 state value function at the final year of the planning horizon of the 3 state problem. Other guesses sum utility over a few centuries fixing the investment rate to a reasonable value and the abatement rate to 100 %, independent of the initial state. A similar method iterates the stationary Bellman equation fixing exogenous parameters to their values at the end of the planning horizon (again replacing the processor intensive maximization step by merely guessing an optimal policy). See Cai et al. (2012a) for an example of solving the DICE model over a finite time horizon.
Fourteen modeling groups had submitted data for 23 AOGCMs and MAGICC 6.0 is calibrated to the 19 of these AOGCMs for which sufficient data was available to carry out the calibration. Calibration III uses the widest set of calibration runs. See section 4.3.2 of Meinshausen et al. (2011) for a discussion of the emulation error using MAGICC 6.0. For individual AOGCMs the error is small as compared to the disagreement across AOGCMs. For the purpose of the current paper, I am interested in the model’s ability to emulate the mean response of the AOGCMs, where MAGICC 6.0 performs even better.
See IPCC (2000) for details on the scenarios. They reflect a wide range of emission forecasts that represent different assumptions on population growth, technological development and cross-regional spill over, and economic development and convergence. The new RCP scenario are labeled by the radiative forcing they produce by the end of the century and are described in Moss et al. (2007).
A small difference also results from the fact that the EXCEL spreadsheet version of DICE that we use for our comparison differs slightly from the GAMS version that we implemented in Matlab. The EXCEL version of DICE subtracts abatement costs in a way that is independent of climate damages, whereas abatement costs in the GAMS and, thus, our version of DICE scale with production net of climate damages. The effect of this difference is very small (proportional to damages times abatement cost, both measured as percent of world output).
These time intervals correspond to \([0,1)\) and \([0,0.99999]\) in artificial time, respectively. Whereas splines place a node on the bounds of the support interval, the Chebychev nodes lie stricly inside of the support interval, thus, allowing us to use infinity as the upper bound. Also in the case of the Chebychev basis our actual time nodes do not exceed the 600 year time horizon that our sophisticated interpolation relies on for interpolating DICE’s original emission and temperature dynamics. However, we show that further increasing the node numbers in the time dimension has a negligible impact on the model results. Increasing the node number also pushes the highest Chebychev nodes further out into the future. Note that placing the highest time node at year 576 does not imply that the policy maker’s planning horizon ends there. We use a smooth interpolation in the time dimension, not cutting off the planning horizon at any given point.
Note that our logarithmic transformation clusters more nodes on in the close future as opposed to the distant future. We found that this clustering is useful because the DICE model is particularly non-stationary in the close future. We picked the current transformation after testing a small set of different time transformations, including a logarithmic variation that reduces the clustering. However, it is likely that other time transformations can be found that reduce the number of time nodes needed to obtain the same quality in the approximations. Note that for some transformations the model becomes less stable than under the logarithmic transformation.
We used the EXCEL version downloadable from http://nordhaus.econ.yale.edu/DICE2007.htm to generate the optimal time paths of DICE-2007. It generates a longer time series than depicted in Nordhaus (2008). Note that the EXCEL model assumes a constant savings rate. We find an almost constant savings rate in our optimizing model, and the EXCEL version of DICE seems to be a close fit to the fully optimizing GAMS version as well for the time span for which we have both data series. The EXCEL solver is not able to solve for both investment and abatement over the full trajectory. We have also modified the EXCEL DICE model to explicitly optimize investment over the first century and then jointly chose an investment rate for the remaining time horizon. The impact on optimal abatement was very minor and Fig. 4 shows the crosses corresponding to this modified DICE optimization (“DICE io” for “investment optimized”).
References
Alex L. Marten SCN (2013) Temporal resolution and DICE. Nat Clim Change 3(6):526
Bansal R, Yaron A (2004) Risks for the long run: a potential resolution of asset pricing puzzles. J Financ 59(4):1481–1509
Bansal R, Kiku D, Yaron A (2010) Long run risks, the macroeconomy, and asset prices. Am Econ Rev Pap Proc 100:542–546
Cai Y, Judd KL, Lontzek TS (2012a) Continuous-time methods for integrated assessment models. NBER Working Papers 18365, National Bureau of Economic Research Inc
Cai Y, Judd KL, Lontzek TS (2012b) DSICE: a dynamic stochastic integrated model of climate and economy. Working Paper 12-02, RDCEP
Cai Y, Judd KL, Lontzek TS (2012c) Open science is necessary. Nat Clim Change 2:299
Campbell JY (1996) Understanding risk and return. J Political Econ 104(2):298–345
Crost B, Traeger CP (2014) Optimal CO2 mitigation under damage risk valuation. Nat Clim Change. doi:10.1038/nclimate2249
Crost B, Traeger CP (2013) Optimal climate policy: uncertainty versus Monte-Carlo. Econ Lett 120:552–558
Epstein LG, Zin SE (1989) Substitution, risk aversion, and the temporal behavior of consumption and asset returns: a theoretical framework. Econometrica 57(4):937–969
Fischer C, Springborn M (2011) Emissions targets and the real business cycle: intensity targets versus caps or taxes. J Environ Econ Manag 62(3):352–366
Heutel G (2012) How should environmental policy respond to business cycles? Optimal policy under persistent productivity shocks. Rev Econ Dyn 15:244–264
Hoel M, Karp L (2001) Taxes and quotas for a stock pollutant with multiplicative uncertainty. J Public Econ 82:91–114
Hoel M, Karp L (2002) Taxes versus quotas for a stock pollutant. Res Energy Econ 24:367–384
Interagency Working Group on Social Cost of Carbon, U. S. G. (2010) Technical support document: social cost of carbon for regulatory impact analysis under executive order 12866, Department of Energy
Interagency Working Group on Social Cost of Carbon, U. S. G. (2013) Technical support document: technical update of the social cost of carbon for regulatory impact analysis under executive order 12866, Department of Energy
IPCC (2000) Emissions scenarios. Cambridge University Press, Cambridge
IPCC (2007) Contribution of working group I to the fourth assessment report of the Intergovernmental Panel on Climate Change, 2007. Cambridge University Press, Cambridge
IPCC (2013) Climate Change 2013: The Physical Science Basis, Intergovernmental Panel on Climate Change. Preliminary Draft, Geneva
Jensen S, Traeger CP (2013) Optimally climate sensitive policy under uncertainty and learning, Working paper, University of California, Berkeley
Jensen S, Traeger CP (2014) Growth uncertainty in the integrated assessment of climate change. Eur Econ Rev 69:104–125
Karp L, Zhang J (2006) Regulation with anticipated learning about environmental damages. J Environ Econ Manag 51:259–279
Keller K, Bolker BM, Bradford DF (2004) Uncertain climate thresholds and optimal economic growth. J Environ Econ Manag 48:723–741
Kelly DL (2005) Price and quantity regulation in general equilibrium. J Econ Theory 125(1):36–60
Kelly DL, Kolstad CD (1999) Bayesian learning, growth, and pollution. J Econ Dyn Control 23:491–518
Kelly DL, Kolstad CD (2001) Solving infinite horizon growth models with an environmental sector. Comput Econ 18:217–231
Kelly DL, Tan Z (2013) Learning and climate feedbacks: optimal climate insurance and fat tails, University of Miami Working paper
Leach AJ (2007) The climate change learning curve. J Econ Dyn Control 31:1728–1752
Lemoine D, Traeger C (2014) Watch your step: optimal policy in a tipping climate. Am Econ J Econ Policy 6:1–31
Meinshausen M, Raper S, Wigley T (2011) Emulating coupled atmosphere-ocean and carbon cycle models with a simpler model, magicc6—part 1: model description and calibration. Atmos Chem Phys 11:1417–1456
Miranda M, Fackler PL (eds) (2002) Applied computational economics and finance. Massachusetts Institute of Technology, Cambridge
Moss R, Babiker M, Brinkman S, Calvo E, Carter T, Edmonds J, Elgizouli I, Emori S, Erda L, Hibbard K, Jones R, Kainuma M, Kelleher J, Lamarque JF, Manning M, Matthews B, Meehl J, Meyer L, Mitchell J, Nakicenovic N, O’Neill B, Pichs R, Riahi K, Rose S, Runci P, Stouffer R, vanVuuren D, Weyant J, Wilbanks T, vanYpersele JP, Zurek M (2007) Towards new scenarios for analysis of emissions, climate change, impacts, and response strategies. Intergovernmental Panel on Climate Change, Geneva
Nakamura E, Steinsson J, Barro R, Ursua J (2010) Crises and recoveries in an empirical model of consumption disasters. Am Econ J Macroecon 5(3):35–74
Nordhaus W (2008) A question of balance: economic modeling of global warming. Yale University Press, New Haven (online preprint: a question of balance: weighing the options on global warming policies)
Nordhaus W, Boyer J (2000) Warming the world. MIT Press, Cambridge
Traeger CP (2009) Recent developments in the intertemporal modeling of uncertainty. ARRE 1:261–85
Traeger CP (2010) Intertemporal risk aversion. CUDARE Working Paper No. 1102
Traeger CP (2012) Why uncertainty matters—discounting under intertemporal risk aversion and ambiguity, CESifo Working Paper No. 3727
Vissing-Jørgensen A, Attanasio OP (2003) Stock-market participation, intertemporal substitution, and risk-aversion. Am Econ Rev 93(2):383–391
von Neumann J, Morgenstern O (1944) Theory of games and economic behaviour. Princeton University Press, Princeton
Weil P (1990) Nonexpected utility in macroeconomics. Q J Econ 105(1):29–42
Acknowledgments
I thank Larry Karp, Benjamin Crost, Svenn Jensen, Derek Lemoine, David Kelly, Tony Smith, Klaus Keller, Robert Nicholas, Inez Fung, Ujjayant Chakravorty, the referees, and the editor, Jared Carbone. Partial funding by the Giannini Foundation and the National Science Foundation under Grant No. GEO-1240507 on Sustainable Climate Risk Management (SCRiM) is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix
A Normalizing the Bellman Equation
The general Bellman equation expressed in terms of the original value function \(V\) is
Using effective labor units, i.e., the definitions \(c_t=\frac{C_t}{A_t L_t}\) and \(k_t=\frac{K_t}{A_t L_t}\), we bring this equation to the form

The calibration of the rate governing CO\(_2\) removal from the atmosphere. We calibrate the initial rate \(\delta _{M,0}\) and the asymptotic rate \(\delta _{M,\infty }\). The first line in the legend displays the parameter values chosen in our calibration. The other lines show the value of the parameter that was changed with respect to our chosen calibration

The calibration of the rate governing CO\(_2\) removal from the atmosphere. We calibrate the parameter \(\delta ^{*}_{M}\) governing the speed of convergence from the initial to the asymptotic rate of CO\(_2\) removal
The second line inserted \(A_{t+1}^{1-\eta } L_{t+1}\) in the denominator of the inner bracket, which cancels with the term \(A_{t+1}^{1-\eta } L_{t+1}=\exp [(1-\eta )g_{A,t}{\Delta t}] A_{t}^{1-\eta } \exp [g_{L,t}{\Delta t}] L_{t}\) inserted outside of the brackets. We divide both sides of the equation by \(A_t^{{1-\eta }} L_t\) and define \(V^*(k_\tau ,M_\tau ,T_\tau ,\varvec{\Phi }_\tau ,\tau )=\frac{\left. V(K_t,M_t,T_t,\varvec{\Phi }_t,t) \right| _{K_t=k_t A_t L_t}}{ A_t^{{1-\eta }}L_t}\) yielding
and, thus, Eq. (26) and its special case equation (23).

The calibration of the warming delay parameter \(\sigma _{forc}\) and the parameter \(\sigma _{ocean}\) connecting atmospheric and oceanic temperatures. The first line in the legend displays the parameter values chosen in our calibration. The other lines show the value of the parameter that was changed with respect to our chosen calibration

Compares our simple min-quadratic approximation of the temperature difference between the atmosphere and the oceans given in Eq. (17) to the actual difference resulting from the DICE-2007 model. The noticeable difference emerging two centuries into the future causes also the slightly more pronounced difference between our and DICE’s atmospheric temperature observed after the year 200 in the earlier calibration plots. Section 5.3 discusses a more sophisticated interpolation using a Chebychev basis and a larger set of interpolation paths (see Fig. 9)
B Calibration
The section summarizes the numerical part of the calibration discussed in Sect. 3.2 whose result we presented in Sect. 5.1. Table 1 summarizes the model parameters. We calibrate our model so that the optimal time paths of CO\(_2\) concentration, temperature, abatement rate, and optimal carbon tax closely resemble those predicted by the DICE-2007 model.Footnote 24 Figures 5 and 6 show our calibration of Eq. (16), approximating the carbon cycle. Our carbon removal rate decreases from the initial value \(\delta _{M,0}\) to the asymptotic value \(\delta _{M,\infty }\), where the rate of decline is characterized by \(\delta ^*_M\). Figure 7 shows the calibration of the heat capacity and feedback related delay parameter \(\sigma _{forc}\), and of the parameter \(\sigma _{ocean}\) capturing ocean temperature related feedbacks (Eq. 13). Any individual parameter change improving the fit in one dimension worsens the fit in at least one of the other variables. Finally, Fig. 8 depicts the difference between oceanic and atmospheric temperatures in DICE-2007, and compares it to our simple quadratic approximation stated in Eq. (17).

Compares our more sophisticated interpolation of the atmosphere-ocean temperature difference and the rate of carbon removal (Sect. 3.3). The circles show the decadal values resulting from the original DICE paths (data). The dashed blue line shows the (average) time trend fitted by a 30 node cubic spline. The solid lines recover the original data using the time trend and a linear, period-dependent correction based on the atmospheric carbon content
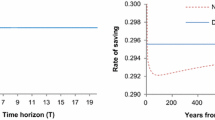
We solve the Bellman equation (23) by help of the function iteration algorithm described in Sect. 4.2. We approximate the value function \(V^*\) by Chebyshev polynomials (Fig. 9). We update the basis coefficients by collocation at the Chebychev nodes spelled out in Table 2 (rectangular grid). To arrive at this final node grid, we sequentially increased the number of nodes in each dimension, until a further increase in the number of basis function no longer affected the solution. Figure 2 shows that a further increase of the node number beyond our \(18\times 6\times 10\times 6=6480\) nodes has no observable effect on increasing the accuracy of our simulation. Our convergence criterion was a coefficient change of less than \(10^{-4}\). The corresponding maximal relative change in the value function was less than \(10^{-10}\). Figure 10 shows that a further reduction of the convergence tolerance by an order of magnitude had no effect on the optimal time paths of the variables of interest.

Robustness of the results to a decrease in the convergence tolerance

Compares our simple calibration and those of the DICE 2007 and DICE 2013 to the MAGICC model. The scenarios are the same as in Fig. 3, but here we directly compare the temperature response to the radiative forcing generated in the different scenarios by all greenhouse gases. The vertical axes measure the temperature increase over pre-industrial levels in degree Celsius, starting with the same initial conditions in 2005

Compares our simple calibration and those of the DICE 2007 and DICE 2013 to the MAGICC model. We show the temperature response to the remaining emission scenarios used in the 4th (SRES) and 5th (RCP) Assessment Reports of the IPCC. On the left we show the direct emission response, on the right the temperature response of the implied radiative forcing by all greenhouse gases. The vertical axes measure the temperature increase over pre-industrial levels in degree Celsius, starting with the same initial conditions in 2005
C Further Comparisons to the MAGICC Model
The present part of the appendix extends the comparison of our base case calibration and of the DICE 2007 and DICE 2013 models to the average of the AOGCM models used in the IPCC as emulated by MAGICC 6.0. We explained in Sect. 5.2 that MAGICC and the SRES and RCP scenarios model a large number of greenhouse gas emissions explicitly, and that the DICE (and our) integrated assessment model only endogenize fossil fuel based CO\(_2\) emissions. Our comparison in Sect. 5.2 asks how well the integrated assessment models perform in approximating more comprehensive climate policy scenarios. Part of the failure in reproducing the temperatures of the SRES and RCP scenarios is that these simplified integrated assessment models have a fixed exogenous forcing proxy for all non-CO\(_2\) greenhouse gas emissions. A more favorable comparison between the integrated assessment models and MAGICC feeds the joint radiative forcing of all greenhouse gases of the SRES and RCP scenarios to DICE and our model. Figure 11 presents the results for the same scenarios that Fig. 3 compares based on their industrial CO\(_2\) emissions component. As to be expected, all models perform significantly better in reproducing the temperature response of MAGICC. In the majority of cases, our simplified model performs slightly better than the original DICE model despite our simplifications of the temperature dynamics.
Figure 12 fills in the same comparison undertaken in Figs. 3 and 11 for the remaining SRES and RCP scenarios. The SRES A1F is a more fossil fuel intensive scenario and, like RCP 8.5 in the new scenarios, it is not a candidate for an optimal policy as it significantly exceeds 4\(^\circ \)C before the end of the century. RCP 3 is the other extreme. Here CO\(_2\) emissions become negative already in the current century as a consequences of major immediate reductions in combination with carbon capture. Again, it is not a candidate for an optimal policy—without significantly altering abatement cost and damage assumptions and introducing cheap carbon sequestration. The major divergence between our base case calibration and the MAGICC temperature in the emissions based graph on the left hand side is a consequence of the major reduction of non-fossil fuel based emission in MAGICC not accounted for in the integrated assessment models: the graph on the right hand side takes the radiative forcing of all emissions into account and delivers a temperature response closely resembling that of MAGICC.
Rights and permissions
About this article

Cite this article
Traeger, C.P. A 4-Stated DICE: Quantitatively Addressing Uncertainty Effects in Climate Change. Environ Resource Econ 59, 1–37 (2014). https://doi.org/10.1007/s10640-014-9776-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10640-014-9776-x
Keywords
- Climate change
- Uncertainty
- Integrated assessment
- DICE
- Dynamic programming
- Risk aversion
- Intertemporal substitution
- MAGICC
- Basis
- Recursive utility