
Abstract
Rehabilitation robots for active exercise requires compliant but consistent torque (or force) assistance (or imposition) while passive rehabilitation robots are programmed to execute certain movements for patients. This kind of torque assistance in the rehabilitation system can be provided by using SEA (Series Elastic Actuator). In this paper, low stiffness SEA and spring hysteresis compensation are proposed for the robust and accurate torque control of the rehabilitation robot. C-DSSAS (Compact Dual Spiral Spring Actuation System) is developed to implement the low stiffness SEA and a hysteresis compensation method is proposed for robust accurate torque control. Pros and cons of low stiffness SEAs are dealt with in order to explain validity of proposed application. In addition, proposed hysteresis compensation torque controller has backlash-based polynomial model and passivity-based control. Experiments of active exercise of knee were performed wearing the knee rehabilitation device using the C-DSSAS with hysteresis control. The experimental results demonstrate its improved performance of the robot in terms of the robustness and accuracy.



















Similar content being viewed by others

References
Akdoğan, E., & Adli, M. A. (2011). The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot. Mechatronics, 21(3), 509–522.
Andrews, J. R., Harrelson, G. L., & Wilk, K. E. (2011). Physical rehabilitation of the injured athlete. Philadelphia, PA: Elsevier Saunders.
Associated Spring. (1981) Design handbook: Engineering guide to spring design. Associated Spring, Barnes Group Inc.
Au, S. K., Herr, H., Weber, J., Martinez-Villalpando, E. C. (2007). Powered ankle-foot prosthesis for the improvement of amputee ambulation. Engineering in Medicine and Biology Society, 2007. EMBS 2007. 29th Annual International Conference of the IEEE, (pp. 3020–3026), IEEE.
Bao, J., & Lee, P. L. (2007). Process control: The passive systems approach. Berlin: Springer Science & Business Media.
Bashash, S., & Jalili, N. (2008). A polynomial-based linear mapping strategy for feedforward compensation of hysteresis in piezoelectric actuators. Journal of Dynamic Systems, Measurement, and Control, 130(3), 031008.
Colombo, G., Joerg, M., Schreier, R., & Dietz, V. (2000). Treadmill training of paraplegic patients using a robotic orthosis. Journal of rehabilitation research and development, 37(6), 693.
Desoer, C. A., & Vidyasagar, M. (2009). Feedback systems: Input-output properties (Vol. 55). Philadelphia, PA: SIAM.
Díaz, I., Gil, J. J., Sánchez, E. (2011). Lower-limb robotic rehabilitation: Literature review and challenges. Journal of Robotics, 2011, 759764. doi:10.1155/2011/759764.
Foliente, G. C. (1995). Hysteresis modeling of wood joints and structural systems. Journal of Structural Engineering, 121(6), 1013–1022.
Freivogel, S., Mehrholz, J., Husak-Sotomayor, T., & Schmalohr, D. (2008). Gait training with the newly developed lokohelp-system is feasible for non-ambulatory patients after stroke, spinal cord and brain injury. a feasibility study. Brain Injury, 22(7–8), 625–632.
Frey, M., Colombo, G., Vaglio, M., Bucher, R., Jorg, Matthias, & Riener, Robert. (2006). A novel mechatronic body weight support system. Neural Systems and Rehabilitation Engineering, IEEE Transactions on, 14(3), 311–321.
Ge, P., & Jouaneh, M. (1995). Modeling hysteresis in piezoceramic actuators. Precision Engineering, 17(3), 211–221.
Goffer, A. (2006) Gait-locomotor apparatus, December 26 2006. US Patent 7,153,242.
Gorbet, R. B., Morris, K. A., & Wang, D. W. L. (2001). Passivity-based stability and control of hysteresis in smart actuators. Control Systems Technology, IEEE Transactions on, 9(1), 5–16.
Ham, Rv, Sugar, T. G., Vanderborght, B., Hollander, K. W., & Lefeber, D. (2009). Compliant actuator designs. Robotics & Automation Magazine, IEEE, 16(3), 81–94.
Hesse, S., Uhlenbrock, D., et al. (2000). A mechanized gait trainer for restoration of gait. Journal of rehabilitation research and development, 37(6), 701–708.
http://mitcalc.com/doc/springs/help/en/springs.htm. Accessed 21 June 2016.
http://www.alterg.com/. Accessed 21 June 2016.
http://www.aretechllc.com/. Accessed 21 June 2016.
http://www.biodex.com/physical-medicine/products/dynamometers/system-4-pro. Accessed 21 June 2016.
Ikhouane, F., & Rodellar, J. (2007). Systems with hysteresis: Analysis, identification and control using the Bouc-Wen model. Hoboken: Wiley.
Jafari, A., Tsagarakis, N. G., Vanderborght, B., Caldwell, D. G. (2010). A novel actuator with adjustable stiffness (awas). Intelligent Robots and Systems (IROS), 2010 IEEE/RSJ International Conference on, (pp. 4201–4206), IEEE.
Karavas, N. C., Tsagarakis, N. G., Caldwell, D. G. (2012). Design, modeling and control of a series elastic actuator for an assistive knee exoskeleton. Biomedical Robotics and Biomechatronics (BioRob), 2012 4th IEEE RAS & EMBS International Conference on, (pp. 1813–1819), IEEE.
Khalil, H. K., & Grizzle, J. (2002). Nonlinear systems, vol. 3. Upper Saddle River: Prentice Hall.
Kim, Y., Lee, J., & Park, J. (2013). Compliant joint actuator with dual spiral springs. Mechatronics, IEEE/ASME Transactions on, 18(6), 1839–1844.
Kong, K., Bae, J., & Tomizuka, M. (2009). Control of rotary series elastic actuator for ideal force-mode actuation in human-robot interaction applications. Mechatronics, IEEE/ASME Transactions on, 14(1), 105–118.
Kuhnen, K. (2003). Modeling, identification and compensation of complex hysteretic nonlinearities: A modified prandtl-ishlinskii approach. European journal of control, 9(4), 407–418.
Kuhnen, K., & Janocha, H. (2001). Inverse feedforward controller for complex hysteretic nonlinearities in smart-material systems. Control and Intelligent systems, 29(3), 74–83.
Laffranchi, M., Tsagarakis, N. G., Cannella, F., Caldwell, D. G. (2009). Antagonistic and series elastic actuators: a comparative analysis on the energy consumption. Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference on, (pp. 5678–5684), IEEE.
Lagoda, C., Schou, A. C., Stienen, A. H. A., Hekman, E. E. G., van der Kooij, H. (2010). Design of an electric series elastic actuated joint for robotic gait rehabilitation training. Biomedical Robotics and Biomechatronics (BioRob), 2010 3rd IEEE RAS and EMBS International Conference on, (pp. 21–26), IEEE.
Ok, J. K., Yoo, W. S., & Sohn, J. H. (2008). New nonlinear bushing model for general excitations using bouc-wen hysteretic model. International Journal of Automotive Technology, 9(2), 183–190.
Pratt, J. E., Krupp, B. T., Morse, C. J., Collins, S. H. (2004). The roboknee: An exoskeleton for enhancing strength and endurance during walking. Robotics and Automation, 2004. Proceedings. ICRA’04. 2004 IEEE International Conference on, (Vol 3, pp. 2430–2435) , IEEE.
Rouse, E. J., Mooney, L. M., Martinez-Villalpando, E. C., Herr, H. M. (2013). Clutchable series-elastic actuator: Design of a robotic knee prosthesis for minimum energy consumption. In Rehabilitation Robotics (ICORR), 2013 IEEE International Conference on, (pp. 1–6), IEEE.
Schmidt, H. (2004). Hapticwalker-a novel haptic device for walking simulation, Proc. of’EuroHaptics.
Sergi, F., Accoto, D., Carpino, G., Tagliamonte, N. L., Guglielmelli, E. (2012). Design and characterization of a compact rotary series elastic actuator for knee assistance during overground walking. Biomedical Robotics and Biomechatronics (BioRob), 2012 4th IEEE RAS & EMBS International Conference on, (pp. 1931–1936), IEEE.
Veneman, J. F., Ekkelenkamp, R., Kruidhof, R., van der Helm, F. C. T., & van der Kooij, Herman. (2006). A series elastic-and bowden-cable-based actuation system for use as torque actuator in exoskeleton-type robots. The international journal of robotics research, 25(3), 261–281.
Veneman, J. F., Kruidhof, R., Hekman, E. E. G., Ekkelenkamp, R., Van Asseldonk, Edwin H F, & Van Der Kooij, Herman. (2007). Design and evaluation of the lopes exoskeleton robot for interactive gait rehabilitation. Neural Systems and Rehabilitation Engineering, IEEE Transactions on, 15(3), 379–386.
Voight, M., Hoogenboom, B., & Prentice, W. (2006). Musculoskeletal interventions: Techniques for therapeutic exercise. New York: McGraw Hill Professional.
Wang, C.-H., Foliente, G. C., Sivaselvan, M. V., & Reinhorn, A. M. (2001). Hysteretic models for deteriorating inelastic structures. Journal of Engineering Mechanics, 127(11), 1200–1202.
West, R Gary. Powered gait orthosis and method of utilizing same, February 10 2004. US Patent 6,689,075.
Acknowledgments
This work have been supported by the National Research Foundation of Korea funded by the Ministry of Science, ICT and Future Planning (2011-0011341 and 2015-055375).
Author information
Authors and Affiliations
Corresponding author
Additional information
An erratum to this article is available at http://dx.doi.org/10.1007/s10514-016-9611-z.
Appendices
Appenndix 1: Model parameter identification
The model parameters are calculated from torque data for the deformation of the spring obtained by the experiments with actual springs. First, the parameters associated with the ascending curve and the descending curve are firstly calculated from data of blue solid lines as shown in Fig. 20b when spring deformation trajectory is given from blue solid lines in Fig. 20a. These data is the experimental data for the medium stiffness spring of Table 4. The trajectory shuttle with a constant speed between the minimum and maximum value of predetermined deformation range. Although a permissible torque range of the SEA was about 14 Nm torque spring, we set the deformation range for spring identification about 16 Nm with marginal range. First, the linear stiffness k is obtained by the linear regression from the total data as satisfying following format
Then data is classified into four of positive ascending curve, negative ascending curve, positive descending curve, and negative descending curve, based on the sign of displacement and its velocity. Specific parts of data speculated to transition line are removed discretionally. We discarded a part of data as much as 0.05rad from maximum displacement of positive descending curve and minimum deformation of negative ascending curve. The four curve functions of the model are obtained through polynomial regression process that meets the format of Eq. (17). We decided proper degrees of the polynomials though trial and error, and they were decided ’5’ in common in case of the medium spring module. Then these result functions are checked to satisfy the condition of Eqs. (14) and (15). Figure 21 shows the results of polynomial regression from the data shown in Fig. 20. The solid lines of Fig. 21a imply four sub-functions \({f _{ac+}}\), \({f _{ac-}}\), \({f _{dc+}}\), and \({f _{dc-}}\) of ascending and descending curves. Their parameters are described in Table 4. Dashed black line in Fig. 21a represents the difference between the ascending and the descending curve, and we can determine whether they satisfy the condition of Eq. (14) by checking those line. The condition of Eq. (15) is checked by derivative of the functions of dash-dotted line in the Fig. 21b. It is also used for finding the constant slope values of the transition line function to make sure that they meet the conditions of Eqs. (19) and (20).

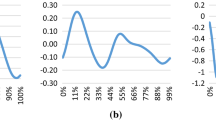
Experiment and result of deformation trajectory for medium stiffness spring in Chapter 5 in order to obtain ascending and descending curve functions. a Reference deformation trajectory. b Result torque data for deformation value

Extracted functions for ascending and descending curves. a Four functions for ascending and descending curves, and the difference between ascending and descending curves. b Differential functions of the four functions
A separate experiment is necessary in order to obtain the constant slope values \({s_+}\) and \({s_-}\) of transition line function. To obtain these values, it requires a trajectory of deformation that has a lot of winding direction switching in a variety of deformation values as shown in Fig. 22a. The deformation-torque data from experiments with this deformation trajectory shown in Fig. 22b, c.

Experiment and results for extracting slope constants of transition line. a Deformation trajectory. b Measured data for the green part of the trajectory. c Measured data for the blue and red part. d Estimated data by obtained slope constant values for the green part of the trajectory. e Estimated data for the blue and red part
To obtain \({s_+}\) and \({s_-}\), torque estimation for spring deformation data is required for any slope value of s which satisfy the conditions of Eqs. (19) and (20). Results of ascending and descending curve functions obtained previously are required for this purpose, then torque estimation have to be performed by the model function described in the Algorithm 1. The extracted parameter \({s_+}\) and \({s_-}\) have to be make the least total sum of difference between estimated torque values and measured values. To satisfy this condition, the following objective function for a optimization process is required
where subscript k is k-th acquired data, \({\tau _{err,k}}\) is torque error between a estimated value and a measured value, \({\tau _k}\) is measured value, and \({f_{hys}}\) is the hysteresis model function that has input of deformation value \({\theta _k}\) and slope variable s. Finally, \({s_+}\) and \({s_-}\) according to the sign of the deformation value are obtained as follows
where \({s_{+,min}}\) and \({s_{,min}}\) are from the conditions of Eqs. (19) and (20). In this manner, all of the parameters of the proposed model are obtained. Table 7 describes torque error between estimation value and measured value of the springs according to models.
Appendix 2: Model passivity
In this section, we prove that all of the contour integral values of the hysteresis loops in the proposed model is non-negative, supporting the condition of Eq. (35) showing passivity of the model. There are four possible cases of the hysteresis loops of the model, and their contour integral values are calculated in this section. For simplicity, cases in positive deformation of springs are covered. Figure 23 shows examples of the four types of loops when deformation values are positive.

Four possible types of hysteresis loops in the proposed model
First of all, we deal with the loop generated by the path OBAO (\({\theta _O<\theta _A<\theta _B}\)). The loop is closed by a ascending curve, a descending curve, and a trasition line. Its contour integral is represented as the sum of two definite integral as following
where \({\theta }\) with subscript is deformation at specific point, \({f_{tl+,AB}}\) is the transition line function passing through the segment AB, and \({\theta _{min}}\) and \({\theta _{max}}\) are minimum and maximum deformation values, respectively. The first definite integral term is positive from the condition of Eq. (14), and the second term is also positive the condition of Eq. (21). Thus the contour integral of path OBAO is positive.
The loop by the path CDFEC (\({\theta _C<\theta _D<\theta _E<\theta _F}\)) is closed by a ascending curve, a descending curve, and two transition lines. The contour integral is depicted as following
where \({f_{tl+,CD}}\) and \({f_{tl+,FE}}\) are the transition line function passing through the segment CD and FE, respectively. This integration is also positive by the condition of Eqs. (14) and (21).
In case of path GIJHG (\({\theta _G<\theta _H<\theta _I<\theta _J}\)), the loop is surrounded by a ascending curve, a descending curve, and two transition lines like the previous case. The contour integral is expressed as following
where \({f_{tl+,GI}}\) and \({f_{tl+,HJ}}\) are the transition line function passing through the segment GI and HJ, respectively. The first integral term and the third term are positive by the condition of Eq. (21). From Eq. (18), the function inside the second integral term can be expressed as following
where \({s_+}\) is constant slope of the positive transition line function, \({p_{GI}}\) and \({p_{HJ}}\) are constant terms of function \({f_{tl+,GI}}\) and \({f_{tl+,HJ}}\), respectively. If the difference between \({p_{GI}}\) and \({p_{HJ}}\) is positive, description of Eq. (46) is true. Function \({f_{tl+,GI}}\) and \({f_{tl+,HJ}}\) go through the point \({G~(\theta _G, \tau _G)}\) and \({H~(\theta _H, \tau _H)}\) respectively, thus following two equations can be expressed.
By simplifying Eq. (48) for constants \({p_{GI}}\) and \({p_{HJ}}\) and then substituting these equations to Eq. (47), following result is obtained from the condition of Eq. (21).
Therefore, description of Eq. (46) is true.
The path KLK(\({\theta _K<\theta _L}\)) is only on a transition line, thus there is no hysteresis loop by the model. The contour integral of this case is represent as following
where \({f_{tl+,KL}}\) is the transition line function passing through the segment KL.
Rights and permissions
About this article

Cite this article
Choi, W., Won, J., Lee, J. et al. Low stiffness design and hysteresis compensation torque control of SEA for active exercise rehabilitation robots. Auton Robot 41, 1221–1242 (2017). https://doi.org/10.1007/s10514-016-9591-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-016-9591-z