
Abstract
Coordinating a mobile sensor team (MST) to cover targets is a challenging problem in many multiagent applications. Such applications are inherently dynamic due to changes in the environment, technology failures, and incomplete knowledge of the agents. Agents must adaptively respond by changing their locations to continually optimize the coverage of targets. We propose distributed constraint optimization problems (DCOP)_MST, a new model for representing MST problems that is based on DCOP. In DCOP_MST, agents maintain variables for their physical positions, while each target is represented by a constraint that reflects the quality of coverage of that target. In contrast to conventional, static DCOPs, DCOP_MST not only permits dynamism but exploits it by restricting variable domains to nearby locations; consequently, variable domains and constraints change as the agents move through the environment. DCOP_MST confers three major advantages. It directly represents the multiple forms of dynamism inherent in MSTs. It also provides a compact representation that can be solved efficiently with local search algorithms, with information and communication locality based on physical locality as typically occurs in MST applications. Finally, DCOP_MST facilitates organization of the team into multiple sub-teams that can specialize in different roles and coordinate their activity through dynamic events. We demonstrate how a search-and-detection team responsible for finding new targets and a surveillance sub-team tasked with coverage of known targets can effectively work together to improve performance while using the DCOP_MST framework to coordinate. We propose different algorithms to meet the specific needs of each sub-team and several methods for cooperation between sub-teams. For the search-and-detection team, we develop an algorithm based on the DSA that forces intensive exploration for new targets. For the surveillance sub-team, we adapt several incomplete DCOP algorithms, including MGM, DSA, DBA, and Max-sum, which requires us to develop an efficient method for agents to find the value assignment in their local environment that is optimal in minimizing the maximum unmet coverage requirement over all targets. The disadvantage of dynamic domains based on physical locality is that adaptations of standard local search algorithms tend to become trapped in local optima where targets beyond the immediate range of the agents go uncovered. To address this shortcoming we develop exploration methods to be used with the local search algorithms. Our algorithms are extensively evaluated in a simulation environment. We use a reputation model to determine the individual credibility of agents and consider both additive and submodular joint credibility functions for determining coverage of targets by multiple agents. The performance is measured on two objectives: minimizing the maximum remaining coverage requirement, and minimizing the sum of remaining coverage requirements. Our results show that DSA and MGM with the exploration heuristics outperform the other incomplete algorithms across a wide range of settings. Furthermore, organizing the team into two sub-teams leads to significant gains in performance, and performance continues to improve with greater cooperation between the sub-teams.






























Similar content being viewed by others



Notes
In this paper we assume that each agent resides on a mobile sensor and we use the terms agent and sensor interchangeably.
We leave the problem of handling inconsistent information caused by malicious activity for future work.
This is a reasonable assumption considering that GPS receivers are used.
For simplicity of presentation and without loss of generality we assume that each agent holds a single variable
In Sect. 5 we present experimental results showing that our approach is also effective for the objective of minimizing the sum of remaining coverage requirements.
In our proof we assume that there are no plateaus (continuous areas with the same \( ER \) value) and that the number of points of the same (highest) value can be found efficiently. If plateaus do exist, the proof is still valid; however, there is a need to use geometric computation in order to evaluate areas instead of points.
In contrast to the assumptions made, in case the initial possible position set or target set are too large and the method cannot be completed in reasonable time, the method can be stopped and one of the positions in \(pos\_set\) can be selected. However, in this case local optimality is not guaranteed.
If not, agents would need to inform all other agents when they change position so that they can update their set of neighbors accordingly.
importance(\(p\)) in line 5 is the true importance of point \(p\) sensed by the agent.
Fig. 10 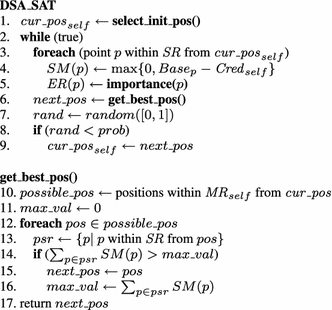
DSA_SAT
In contrast to SPORAS, the initial credibility is not zero since in MSTs we are not concerned with agents using different pseudonyms.
We omit the maximum remaining coverage here because the effect is not notable until all targets are located.
Notice that the MGM_PDMR method reduces to MGM_MST when the domains are fixed and therefore is not evaluated in this experiment.
Beginning with this experiment, we present only the results for the \(F_{ sum}\) method. The results in the experiments using \(F_{ cprob}\) were consistently similar with less apparent differences between the algorithms.
We do not present error bars in this graph because they make the figure unreadable due to the similarity of the results.
In the rest of the figures the error bounds were omitted due to the density of the graphs.

References
Abramson, M., Chao, W., & Mittu, R. (2005). Design and evaluation of distributed role allocation algorithms in open environments. In Proceedings of the 2005 International Conference on Artificial Intelligence 2005, IC-AI 2005 (pp. 565–571).
Arshad, M., & Silaghi, M. C. (2004). Distributed simulated annealing. In Distributed constraint problem solving and reasoning in multi-agent systems, frontiers in artificial intelligence and applications series (Vol. 112), November 2004.
Basharu, M., Arana, I., & Ahriz, H. (2007). Solving coarse-grained DisCSPs with Multi-DisPeL and DisBO-wd. In IAT ’07: Proceedings of the 2007 IEEE/WIC/ACM international conference on intelligent agent technology, Washington, DC, USA (pp. 335–341).
Bejar, R., Domshlak, C., Fernandez, C., Gomes, K., Krishnamachari, B., Selman, B., et al. (2005). Sensor networks and distributed CSP: Communication, computation and complexity. Artificial Intelligence, 161(1–2), 117–148.
Braginsky, D. (2002). Rumor routing algorithm for sensor networks. In Workshop on wireless sensor networks and applications (WSNA), Atlanta, Georgia, USA, September 2002 (pp. 22–31).
Buchegger, S., & LeBoudec, J. Y. (2005). Self-policing mobile ad-hoc networks by reputation. IEEE Communication Magazine, 43, 101–107.
Chechetka, A., & Sycara, K. (2006). No-commitment branch and bound search for distributed constraint optimization. In AAMAS ’06: Proceedings of the fifth international joint conference on autonomous agents and multiagent systems, New York, NY, USA (pp. 1427–1429).
Collin, Z., Dechter, R., & Katz, S. (1999). Self-stabilizing distributed constraint satisfaction. Chicago Journal of Theoretical Computer Science, 5.
Delot, T., Ilarri, S., Cenerario, N., & Hien, T. (2011). Event sharing in vehicular networks using geographic vectors and maps. Mobile Information Systems, 7(1), 21–44.
Du, R., Xu, M., & Zhang, H. (2006). An extended hierarchical trusted model for wireless sensor networks. Wuhan University Journal of Natural Sciences, 11, 1489–1492.
Farinelli, A., Rogers, A., Petcu, A., & Jennings, N. R. (2008). Decentralised coordination of low-power embedded devices using the max-sum algorithm. In 7th International conference on autonomous agents and multi-agent systems, AAMAS-08 (pp. 639–646).
Frye, L., Liang, C., Du, S., & Bigrigg, M. W. (2006). Topology maintenance of wireless sensor networks in node failure-prone environments. In Proceedings of IEEE international conference on networking, sensing and control, April 2006 (pp. 886–891).
Gershman, A., Meisels, A., & Zivan, R. (2006). Asynchronous forward-bounding for distributed constraints optimization. In Proceedings of the 17th European Conference on Artificial Intelligence (ECAI 2006), August 2006 (pp. 103–107).
Gershman, A., Meisels, A., & Zivan, R. (2009). Asynchronous forward bounding. Journal of Artificial Intelligence Research, 34, 25–46.
Grosz, B. J., & Kraus, S. (1996). Collaborative plans for complex group action. Artificial Intelligence, 86(2), 269–357.
Grosz, B. J., & Kraus, S. (1999). The evolution of SharedPlans. In A. Rao & M. Wooldridge (Eds.), Foundations and theories of rational agency (pp. 227–262). Dordrecht: Kluwer Academic Publisher.
He, T., Lee, K.-W., & Swami, A., (2010). Flying in the dark: Controlling autonomous data ferries with partial observations. In Proceedings of the eleventh ACM international symposium on mobile ad hoc networking and computing, MobiHoc ’10 (pp. 141–150). New York, NY: ACM.
Howard, A., Matarić, M. J., & Sukhatme, G. S. (2002). An incremental self-deployment algorithm for mobile sensor networks. Autonomous Robots Special Issue on Intelligent Embedded Systems, 13(2), 113–126.
Jain, M., Taylor, M. E., Yokoo, M., & Tambe, M. (2009). DCOPs meet the real world: Exploring unknown reward matrices with applications to mobile sensor networks. In Proceedings of the twenty-first international joint conference on artificial intelligence (IJCAI-09), Pasadena, CA, USA, July 2009.
Krause, A., Singh, A., & Guestrin, C. (2008). Near-optimal sensor placements in Gaussian processes: Theory, efficient algorithms and empirical studies. Journal of Machine Learning Research, 9, 235–284.
Lass, R. N., Sultanik, E. A., & Regli, W. C. (2008) Dynamic distributed constraint reasoning. In Proceedings of the Twenty-Third AAAI Conference on Artificial Intelligence, Chicago, IL, USA (pp. 1466–1469).
Leskovec, J. (2008). Dynamics of large networks. Ph.D. Thesis, CMU, Pittsburgh, PA, USA.
Macarthur, K. S., Stranders, R., Ramchurn, S. D., & Jennings, N. R. (2011). A distributed anytime algorithm for dynamic task allocation in multi-agent systems. In AAAI.
Maheswaran, R. T., Pearce, J. P., & Tambe, M. (2004). Distributed algorithms for DCOP: A graphical-game-based approach. In Proceedings of parallel and distributed computing systems (PDCS), September 2004 (pp. 432–439).
Mailler, R. (2005). Comparing two approaches to dynamic, distributed constraint satisfaction. In AMAS 2005. Proceedings of the fourth international joint conference on autonomous agents and multiagent systems, Utrecht, Netherlands (pp. 1049–1056).
Modi, P. J., Shen, W., Tambe, M., & Yokoo, M. (2005). ADOPT: Asynchronous distributed constraints optimization with quality guarantees. Artificial Intelligence, 161(1–2), 149–180.
Nemhauser, G. L., Wolsey, L. A., & Fisher, M. L. (1978). An analysis of approximations for maximizing submodular set functions-I. Mathematical Programming, 14(1), 265–294.
Ota, K., Matsui, T., & Matsuo, H. (2009). Layered distributed constraint optimization problem for resource allocation problem in distributed sensor networks. In Principles of practice in multi-agent systems 12th international conference, PRIMA 2009 (pp. 245–260).
Papadimitriou, C. H., & Steiglitz, K. (1982). Combinatorial optimization: Algorithms and complexity. Englewood Cliffs: Prentice-Hall.
Pearce, J. P., & Tambe, M. (2007). Quality guarantees on k-optimal solutions for distributed constraint optimization problems. In International joint conference on artificial intelligence (IJCAI), Hyderabad, India.
Petcu, A., & Faltings, B. (2005). A scalable method for multiagent constraint optimization. In International joint conference on artificial intelligence (IJCAI) (pp. 266–271).
Petcu, A., & Faltings, B. (2005). Superstabilizing, fault-containing multiagent combinatorial optimization. In Proceedings of the national conference on artificial intelligence (AAAI) (pp. 449–454).
Petcu, A., & Faltings, B. (2007). Optimal solution stability in dynamic, distributed constraint optimization. In Proceedings of the international conference on intelligent agent technology (IAT) (pp. 321–327).
Poduri, S., & Sukhatme, G. S. (2004). Constrained coverage for mobile sensor networks. In IEEE International conference on robotics and automation (pp. 165–171).
Ramchurn, S. D., Huynh, D., & Jennings, N. R. (2004). Trust in multi-agent systems. The Knowledge Engineering Review, 19, 2004.
Rogers, A., Farinelli, A., Stranders, R., & Jennings, N. R. (2011). Bounded approximate decentralised coordination via the max-sum algorithm. Artificial Intelligence, 175(2), 730–759.
Schiex, T., Hélène, F., & Verfaillie, G. (1995). Valued constraint satisfaction problems: Hard and easy problems. In International joint conference on artificial intelligence (IJCAI) (Vol. 1, pp. 631–639).
Sen, S., & Durfee, E. H. (1994). The role of commitment in cooperative negotiation. International Journal of Cooperative Information Systems, 3, 67–82.
Silaghi, M. C., & Yokoo, M. (2006). Nogood based asynchronous distributed optimization (ADOPT ng). In AAMAS 2006: Procedings of the fifth international joint conference on autonomous agents and multiagent systems (pp. 1389–1396).
Stranders, R., Delle-Fave, F. M., Rogers, A., & Jennings N. R. (2010). A decentralised coordination algorithm for mobile sensors. In Proceedings of the 24th conference on AI (AAAI).
Stranders, R., Farinelli, A., Rogers, A., & Jennings, N. R. (2009). Decentralised coordination of mobile sensors using the max-sum algorithm. In International joint conference on artificial intelligence (IJCAI) (pp. 299–304).
Sun, X., Yeoh, W., & Koenig, S. (2009). Trading off solution quality for faster computation in DCOP search algorithms. In Proceedings of the international joint conference on artificial intelligence (IJCAI), July 2009 (pp. 354–360).
Taylor, M. E., Jain, M., Jin, Y., Yokoo, M., & Tambe, M. (2010). When should there be a ”me” in ”team”?: Distributed multi-agent optimization under uncertainty. In Proceedings of the 9th conference on autonomous agents and multi agent systems (AAMAS 2010) (pp. 109–116).
Teacy, W. T. L., Farinelli, A., Grabham, N. J., Padhy, P., Rogers, A., Jennings, N. R. (2008). Max-sum decentralised coordination for sensor systems. In AAMAS ’08: Proceedings of the 7th international joint conference on autonomous agents and multiagent systems (pp. 1697–1698). Estoril: International Foundation for Autonomous Agents and Multiagent Systems.
Ukita, N. (2007). Real-time cooperative multi-target tracking by dense communication among active vision agents. Web Intelligence and Agent Systems, 5(1), 15–29.
Wang, G., Cao, G., Berman, P., & Laporta, T. F. (2003). A bidding protocol for deploying mobile sensors. In Proceedings of IEEE ICNP (pp. 315–324).
Yeoh, W., Varakantham, P., Sun, X., Koenig, S. (2011). Incremental DCOP search algorithms for solving dynamic DCOPs (Extended Abstract). In Proceedings of the international joint conference on autonomous agents and multiagent systems (AAMAS) (pp. 1069–1070).
Yokoo, M. (2000). Algorithms for distributed constraint satisfaction problems: A review. Autonomous Agents and Multi-Agent Systems, 3, 198–212.
Zacharia, G., Moukas, R., & Maes P. (1999). Collaborative reputation mechanisms in electronic marketplaces. In Proceedings of the thirty-second Hawaii international conference on system sciences (HICSS-99).
Zhang, W., Xing, Z., Wang, G., & Wittenburg, L. (2005). Distributed stochastic search and distributed breakout: properties, comparishon and applications to constraints optimization problems in sensor networks. Artificial Intelligence, 161(1–2), 55–88.
Zhang, W., Xing, Z., Wang, G., & Wittenburg, L. (2003). An analysis and application of distributed constraint satisfaction and optimization algorithms in sensor networks. In Proceedings of the 2nd international joint conference on autonomous agents and multi-agent systems (AAMAS-03), Melbourne, Australia, July 14–18 (pp. 185–192).
Zilberstein, S. (1996). Using anytime algorithms in intelligent systems. AI Magazine, 17(3), 73–83.
Zivan, R. (2008). Anytime local search for distributed constraint optimization. In Proceedings of the 23rd national conference on artificial intelligence, Chicago, IL, USA (pp. 393–398).
Zivan, R., & Peled, H. (2012). Max/min-sum distributed constraint optimization through value propagation on an alternating dag. In Proceedings of the 11th international conference on autonomous agents and multiagent systems, AAMAS ’12 (pp. 265–272).
Acknowledgments
This research has been supported by AFOSR FA9550-08-1-0356.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zivan, R., Yedidsion, H., Okamoto, S. et al. Distributed constraint optimization for teams of mobile sensing agents. Auton Agent Multi-Agent Syst 29, 495–536 (2015). https://doi.org/10.1007/s10458-014-9255-3
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10458-014-9255-3