
Abstract
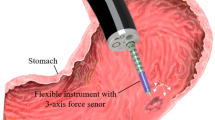
This paper presents a novel Fiber Bragg Grating (FBG)-based palpation force sensor to explore tissue abnormalities during minimally invasive surgery. The proposed sensor design mainly consists of a miniature force-sensitive flexure, one tightly suspended optical fiber embedded with one FBG element and associated connectors and fixations. The flexure design has been prototyped through the configuration synthesis of Sarrus mechanism by using a rigid-body replacement method to achieve an excellent axial linear force–deformation relationship and a large measurement range. The mounted fiber has been configured at the flexure’s central line with its two ends glued, and its tight suspension configuration can achieve improved resolution and sensitivity and avoid the FBG chirping failure compared to the commonly used direct FBG-pasting methods. Finite element method (FEM)-based simulation has been performed to investigate both static and dynamic performance to aid in structural design. Simulation-enabled structural optimization design has also been implemented to further improve the proposed design and the sensor’s sensitivity has been increased. The optimized sensor design has been prototyped and calibrated to demonstrate an excellent linearity with a small linearity error of 0.97% and achieve a high resolution of 2.55 mN within a relatively large measurement range of 0–5 N. Dynamic force stimulation experiments, in vitro palpation implementation on a silicone phantom embedded with simulated tumors and ex vivo indentation experiments on a porcine liver have validated the effectiveness of the presented sensor design.






Similar content being viewed by others

Change history
21 November 2019
The second equation in the section “Definition of Objective Functions and Constraints” was corrected to fix a mismatch between the PDF and HTML versions of the article.
References
Atieh, A., R. Ahmadi, M. Kalantari, J. Dargahi, and M. Packirisamy. A piezoresistive based tactile sensor for use in minimally invasive surgery. In: 2011 IEEE 37th Annual Northeast Bioengineering Conference (NEBEC), Troy, NY, USA, 2011, pp. 1–2.
Bergeles, C., and G. Z. Yang. From passive tool holders to microsurgeons: safer, smaller, smarter surgical robots. IEEE Trans. Biomed. Eng. 61:1565–1576, 2014.
Chen, G., S. Zhang, and G. Li. Multistable behaviors of compliant sarrus mechanisms. J. Mech. Robot. 5:021005-1–021005-10, 2013.
Chuang, C. H., T. H. Li, I. C. Chou, and Y. J. Teng. Piezoelectric tactile sensor for submucosal tumor detection in endoscopy. Sensors Actuators A 244:299–309, 2016.
Ding, X., X. Kong, and J. S. Dai. Advances in Reconfigurable Mechanisms and Robots II. Cham: Springer, 2015.
Fischer, G. S., T. Akinbiyi, S. Saha, M. Talamini, M. Marohn, and R. Taylor. Ischemia and force sensing surgical instruments for augmenting available surgeon information. In: The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2006), Pisa, Italy, 2006, pp. 1030–1035.
Gao, A., Y. Zhou, L. Cao, Z. Wang, and H. Liu. Fiber Bragg grating-based triaxial force sensor with parallel flexure hinges. IEEE Trans. Ind. Electron. 65:8215–8223, 2018.
Ge, J., A. E. James, L. Xu, Y. Chen, K. Kwok, and M. P. Fok. Bidirectional soft silicone curvature sensor based on off-centered embedded fiber bragg grating. IEEE Photon. Technol. Lett. 28(20):2237–2240, 2016.
Guo, Y., J. Kong, H. Liu, H. Xiong, G. Li, and L. Qin. A three-axis force fingertip sensor based on fiber Bragg grating. Sensors Actuators A 249:141–148, 2016.
Howell, L., and A. Midha. The topological synthesis of compliant mechanisms. Mech. Mach. Theory 31(2):185–199, 1996.
Kesner, S. B., and R. D. Howe. Design principles for rapid prototyping forces sensors using 3-D printing. IEEE ASME Trans. Mech. 16:866–870, 2011.
Konstantinova, J., A. Jiang, K. Althoefer, P. Dasgupta, and T. Nanayakkara. Implementation of tactile sensing for palpation in robot-assisted minimally invasive surgery: a review. IEEE Sens. J. 14:2490–2501, 2014.
Li, K., B. Pan, J. Zhan, W. Gao, Y. Fu, and S. Wang. Design and performance evaluation of a 3-axis force sensor for MIS palpation. Sens. Rev. 35:219–228, 2015.
Li, T., C. Shi, and H. Ren. A novel fiber bragg grating displacement sensor with a sub-micrometer resolution. IEEE Photon. Technol. Lett. 29:1199–1202, 2017.
Li, T., C. Shi, and H. Ren. Three-dimensional catheter distal force sensing for cardiac ablation based on fiber Bragg grating. IEEE-ASME T MECH 23(5):2316–2327, 2018.
Liu, H., D. P. Noonan, B. J. Challacombe, P. Dasgupta, L. D. Seneviratne, and K. Althoefer. Rolling mechanical imaging for tissue abnormality localization during minimally invasive surgery. IEEE Trans. Biomed. Eng. 57:404–414, 2010.
Lun, T. L. T., K. Wang, J. D. L. Ho, K. Lee, K. Y. Sze, and K. Kwok. Real-time surface shape sensing for soft and flexible structures using fiber Bragg gratings. IEEE Robot. Autom. Mag. 4(2):1454–1461, 2019.
Menciassi, A., A. Eisinberg, M. C. Carrozza, and P. Dario. Force sensing microinstrument for measuring tissue properties and pulse in microsurgery. IEEE ASME Trans. Mech. 8:10–17, 2003.
Moradi-Dalvand, M., B. Shirinzadeh, A. H. Shamdani, J. Smith, and Y. Zhong. An actuated force feedback-enabled laparoscopic instrument for robotic-assisted surgery. Int. J. Med. Robot. Comput. Assist. Surg. 10:11–21, 2014.
Naidu, A. S., R. V. Patel, and M. D. Naish. Low-cost disposable tactile sensors for palpation in minimally invasive surgery. IEEE ASME Trans. Mech. 22:127–137, 2017.
Polygerinos, P., L. D. Seneviratne, R. Razavi, T. Schaeffter, and K. Althoefer. Triaxial catheter-tip force sensor for MRI-guided cardiac procedures. IEEE ASME Trans. Mech. 18:386–396, 2013.
Polygerinos, P., D. Zbyszewski, T. Schaeffter, R. Razavi, L. D. Seneviratne, and K. Althoefer. MRI-compatible fiber-optic force sensors for catheterization procedures. IEEE Sens. J. 10:1598–1608, 2010.
Puangmali, P., K. Althoefer, L. D. Seneviratne, D. Murphy, and P. Dasgupta. State-of-the-art in force and tactile sensing for minimally invasive surgery. IEEE Sens. J. 8:371–381, 2008.
Puangmali, P., H. Liu, L. D. Seneviratne, P. Dasgupta, and K. Althoefer. Miniature 3-axis distal force sensor for minimally invasive surgical palpation. IEEE ASME Trans. Mech. 17:646–656, 2012.
Pucheta, M. A., and A. Cardona. Design of bistable compliant mechanisms using precision–position and rigid-body replacement methods. Mech. Mach. Theory 45:304–326, 2010.
Qasaimeh, M. A., S. Sokhanvar, J. Dargahi, and M. Kahrizi. PVDF-based microfabricated tactile sensor for minimally invasive surgery. J. Microelectromech. Syst. 18:195–207, 2009.
Seibold, U., B. Kubler, and G. Hirzinger. Prototype of instrument for minimally invasive surgery with 6-axis force sensing capability. In: International Conference on Robotics and Automation, Barcelona, Spain, 2005, pp. 496–501.
Seibold, U., B. Kübler, G. Passig, and G. Hirzinger. Development of actuated and sensor integrated forceps for minimally invasive robotic surgery. J. Biomech. 39:S211, 2006.
Shi, C., S. Giannarou, S. L. Lee, and G. Z. Yang. Simultaneous catheter and environment modeling for trans-catheter aortic valve implantation. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 2014, pp. 2024–2029.
Shi, C., X. Luo, P. Qi, T. Li, T. Fukuda, and H. Ren. Shape sensing techniques for continuum robots in minimally invasive surgery: a survey. IEEE Trans. Biomed. Eng. 64:1665–1678, 2017.
Taffoni, F., D. Formica, P. Saccomandi, G. Di Pino, and E. Schena. Optical fiber-based MR-compatible sensors for medical applications: an overview. Sensors (Basel). 13:14105–14120, 2013.
Tanaka, M., M. Furubayashi, Y. Tanahashi, and S. Chonan. Development of an active palpation sensor for detecting prostatic cancer and hypertrophy. Smart Mater. Struct. 9:878–884, 2000.
Vitiello, V., S. L. Lee, T. P. Cundy, and G. Z. Yang. Emerging robotic platforms for minimally invasive surgery. IEEE Rev. Biomed. Eng. 6:111–126, 2013.
Xie, H., H. Liu, L. D. Seneviratne, and K. Althoefer. An optical tactile array probe head for tissue palpation during minimally invasive surgery. IEEE Sens. J. 14:3283–3291, 2014.
Zarrin, P. S., A. Escoto, R. V. Patel, M. D. Naish, and A. L. Trejos. Development of a 2-DOF sensorized surgical grasper for grasping and axial force measurements. IEEE Sens. J. 18(7):2816–2826, 2018.
Acknowledgments
This work is supported by National Natural Science Foundation of China under Grant 51520105006, Grant 51721003 and Tianjin Natural Science Foundation under Grant 18JCYBJC41400.
Author information
Authors and Affiliations
Corresponding author
Additional information
Associate Editor Ka-Wai Kwok oversaw the review of this article.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lv, C., Wang, S. & Shi, C. A High-Precision and Miniature Fiber Bragg Grating-Based Force Sensor for Tissue Palpation During Minimally Invasive Surgery. Ann Biomed Eng 48, 669–681 (2020). https://doi.org/10.1007/s10439-019-02388-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10439-019-02388-w