
Abstract
Recent experiments have shown the possibility of using the brain electrical activity to directly control the movement of robots or prosthetic devices in real time. Such neuroprostheses can be invasive or non-invasive, depending on how the brain signals are recorded. In principle, invasive approaches will provide a more natural and flexible control of neuroprostheses, but their use in humans is debatable given the inherent medical risks. Non-invasive approaches mainly use scalp electroencephalogram (EEG) signals and their main disadvantage is that these signals represent the noisy spatiotemporal overlapping of activity arising from very diverse brain regions, i.e., a single scalp electrode picks up and mixes the temporal activity of myriads of neurons at very different brain areas. In order to combine the benefits of both approaches, we propose to rely on the non-invasive estimation of local field potentials (LFP) in the whole human brain from the scalp measured EEG data using a recently developed inverse solution (ELECTRA) to the EEG inverse problem. The goal of a linear inverse procedure is to de-convolve or un-mix the scalp signals attributing to each brain area its own temporal activity. To illustrate the advantage of this approach we compare, using an identical set of spectral features, classification of rapid voluntary finger self-tapping with left and right hands based on scalp EEG and non-invasively estimated LFP on two subjects using a different number of electrodes.
Similar content being viewed by others

Notes
This is possible because the operation of the brain interface is asynchronous and, unlike synchronous approaches (Wolpaw and McFarland 1994; Birbaumer et al. 1999; Donchin et al. 2000; Roberts and Penny 2000; Pfurtscheller and Neuper 2001), does not require waiting for external cues that arrive at a fixed pace of 4–10 s.
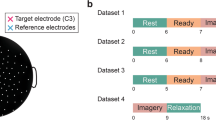
This projection is based on the best-fitting sphere with center and radius selected to fit the scalp region used by the electrodes. This method requires the careful positioning of the electrodes based on anatomical landmarks, i.e., vertex electrode (Cz), middle line, frontal electrodes (Fp) etc. Note that, due to the inaccuracies of boundary detection algorithms, there is no rigid transformation able to “land” a set of electrodes on the scalp detected from the MRI. For this reason, most landing procedures need, at some stage, to project electrode positions on the detected scalp. This procedure has been widely used and tested in clinical studies using standard EEG configurations (e.g., 10-20 and 10-10 systems) where the subject’s MRI is not available as well as in the construction of realistic head models for presurgical evaluation of epileptic patients. Still, minor differences between electrode locations might be expected from one session to another. These variations can be considered as noise in the data and its influence can be alleviated with regularization strategies.
After a visual a posteriori artifact check of the trials, we found no evidence of muscular artifacts that could have contaminated one condition differently from the other.
References
Babiloni F, Cincotti F, Lazzaroni L, Millán J del R, Mouriño J, Varsta M, Heikkonen J, Bianchi L, Marciani MG (2000) Linear classification of low-resolution EEG patterns produced by imagined hand movements. IEEE Trans Rehab Eng 8:186–188
Birbaumer N, Ghanayim N, Hinterberger T, Iversen I, Kotchoubey B, Kübler A, Perelmouter J, Taub E, Flor H (1999) A spelling device for the paralysed. Nature 398:297–298
Carmena JM, Lebedev MA, Crist RE, O’Doherty JE, Santucci DM, Dimitrov DF, Patil PG, Henriquez CS, Nicolelis MAL (2003) Learning to control a brain-machine interface for reaching and grasping by primates. PLoS Biol 1:193–208
Donchin E, Spencer KM, Wijesinghe R (2000) The mental prosthesis: assessing the speed of a P300-based brain-computer interface. IEEE Trans Rehab Eng 8:174–179
Donoghue JP (2002) Connecting cortex to machines: recent advances in brain interfaces. Nat Neurosci Suppl 5:1085–1088
Grave de Peralta R, Gonzalez Andino SL, Millán J del R, Pun T, Michel CM (2003) Direct non-invasive brain computer interfaces. In: 9th International Conference on Functional mapping of the human brain
Grave de Peralta Menendez R, Gonzalez Andino SL (1998) A critical analysis of linear inverse solutions to the neuroelectromagnetic inverse problem. IEEE Trans Biomed Eng 45:440–448
Grave de Peralta Menendez R, Gonzalez Andino SL, Morand S, Michel CM, Landis T (2000) Imaging the electrical activity of the brain: ELECTRA. Hum Brain M 9:1–12
Grave de Peralta Menendez R, Murray MM, Michel CM, Martuzzi R, Gonzalez Andino SL (2004) Electrical neuroimaging based on biophysical constraints. Neuroimage 21:527–539
Hamalainen MS, Ilmoniemi RJ (1994) Interpreting magnetic fields of the brain: minimum norm estimates. Med Biol Eng Comput 32:35–42
Hastie T, Tibshirani R, Friedman J (2001) The elements of statistical learning. Springer, Berlin Heidelberg New York
Ilmoniemi RJ (1993) Models of source currents in the brain. Brain Topogr 5:331–336
Kira K, Rendell LA (1992) The feature selection problem: traditional methods and a new algorithm. In: 9th National Conference on Artificial intelligence, pp 129–134
Kohonen T (1997) Self-organizing maps, 2nd edn. Springer, Berlin Heidelberg New York
Liu AK, Belliveau JW, Dale AM (1998) Spatiotemporal imaging of human brain activity using functional MRI constrained magnetoencephalography data: Monte Carlo simulations. Proc Natl Acad Sci USA 95:8945–8950
Meeker D, Cao S, Burdick JW, Andersen RA (2002) Rapid plasticity in the parietal reach region demonstrated with a brain-computer interface. 2002 Abstract Viewer/Planner, Program no 257.7.2002, Society for Neuroscience
Mehring C, Rickert J, Vaadia E, Cardoso de Oliveira S, Aerten A, Rotter S (2003) Inference of hand movements from local field potentials in the monkey motor cortex. Nat Neurosci 6:1253–1254
Millán J del R, Franzé M, Mouriño J, Cincotti F, Babiloni F (2002a) Relevant EEG features for the classification of spontaneous motor-related tasks. Biol Cybern 86:89–95
Millán J del R, Mouriño J, Franzé M, Cincotti F, Varsta M, Heikkonen J, Babiloni F (2002b) A local neural classifier for the recognition of EEG patterns associated to mental tasks. IEEE Trans Neural Netw 13:678–686
Millán J del R, Renkens F, Mouriño J, Gerstner W (2004) Non-invasive brain-actuated control of a mobile robot by human EEG. IEEE Trans Biomed Eng 51:1026–1033
Mosher JC, Baillet S, Leahy RM (1999) EEG source localization and imaging using multiple signal classification approaches. J Clin Neurophysiol 16:225–238
Nicolelis MAL (2001) Actions from thoughts. Nature 409:403–407
van Oosterom A (1991) History and evolution of methods for solving the inverse problem. J Clin Neurophysiol 8:371–380
Pesaran B, Pezaris JS, Sahani M, Mitra PP, Andersen RA (2002) Temporal structure in neuronal activity during working memory in macaque parietal cortex. Nat Neurosci 5:805–811
Pfurtscheller G, Neuper C (2001) Motor imagery and direct brain-computer communication. Proc IEEE 89:1123–1134
Roberts SJ, Penny WD (2000) Real-time brain-computer interfacing: a preliminary study using Bayesian learning. Med Biol Eng Comput 38:56–61
Scherg M (1992) Functional imaging and localization of electromagnetic brain activity. Brain Topogr 5:103–111
Scherg M (1994) From EEG source localization to source imaging. Acta Neurol Scand Suppl 152:29–30
Schwartz AB, Taylor DM, Helms Tillery SI (2001) Extraction algorithms for cortical control of arm prosthetics. Curr Opin Neurobiol 11:701–707
Serruya MD, Hatsopoulos NG, Paninski L, Fellows MR, Donoghue J (2002) Instant neural control of a movement signal. Nature 416:141–142
Taylor DM, Helms Tillery SI, Schwartz AB (2002) Direct cortical control of 3D neuroprosthetic devices. Science 296:1829–1832
Thomson DJ (1982) Spectrum estimation and harmonic analysis. Proc IEEE 70:1055–1096
Wessberg J, Stambaugh CR, Kralik JD, Beck PD, Laubach M, Chapin JK, Kim J, Biggs SJ, Srinivassan MA, Nicolelis MAL (2000) Real-time prediction of hand trajectory by ensembles of cortical neurons in primates. Nature 408:361–365
Wolpaw JR, McFarland DJ (1994) Multichannel EEG-based brain-computer communication. Electroencephalogr Clin Neurophysiol 90:444–449
Acknowledgements
This work was supported by the Swiss National Science Foundation through the National Center of Competence in Research on “Interactive Multimodal Information Management (IM2)” and also by the Swiss National Science Foundation grant 3152A0-100745/1.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Irene Ruspantini and Niels Birbaumer
Rights and permissions
About this article
Cite this article
Grave de Peralta Menendez, R., González Andino, S., Perez, L. et al. Non-invasive estimation of local field potentials for neuroprosthesis control. Cogn Process 6, 59–64 (2005). https://doi.org/10.1007/s10339-004-0043-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10339-004-0043-x