
Abstract
Due to the spectrum congestion of current navigation signals in the L-band, it is difficult to apply for another two proper frequencies in this band for future low earth orbit (LEO)-based navigation augmentation systems. A feasible frequency scheme of using the combined frequencies in the L, S and C bands is proposed. A high-efficiency modulation scheme, termed continuous phase modulation, is adopted to make full use of the very limited spectrums and satisfy the radio frequency compatibility with the existing navigation systems, radio astronomy, and microwave landing systems. The high propagation loss in the S and C bands is absent for LEO, as the power margin owing to the short-distance propagation has compensated the frequency-dependent attenuation. Besides, for high-precision positioning, we consider the specific integer ratios between frequencies and propose a strategy for LEO precise point positioning (PPP) ambiguity resolution (AR) by directly fixing the L + S or L + C dual-band ionospheric-free (IF) ambiguity. Based on the simulated data, the quality of fractional cycle biases (FCBs) and the performance of PPP AR are analyzed. After removing the FCBs, 100.0, 99.7 and 71.7% of the fractional parts are within ± 0.15 cycles for GPS narrow-lane, LEO L + S dual-band IF and LEO L + C dual-band IF float ambiguities. At user stations, the convergence time of GPS PPP in static mode can be significantly shortened from 17.9 to within 2.5 min with the augmentation of 5.44 LEO satellites. Furthermore, compared with ambiguity-float solutions, the positioning accuracy of GPS AR + LEO AR solutions in east, north and up components is improved from 0.008, 0.008 and 0.027 m to 0.002, 0.003 and 0.011 m for 10-min sessions, respectively, and the fixing rate after time to first fix is almost 100%.








Similar content being viewed by others
References
Avila-Rodriguez JA, Wallner S, Won JH, Eissfeller B, Schmitz-Peiffer A, Floch JJ, Colzi E, Gerner JL (2008) Study on a Galileo signal and service plan for C-band. In: Proc. ION GNSS 2008, Institute of Navigation, Savannah, GA, USA, September 16–19, 2515–2529
Banville S (2016) GLONASS ionosphere-free ambiguity resolution for precise point positioning. J Geod 90(5):487–496
Dai L (2000) Dual-frequency GPS/GLONASS real-time ambiguity resolution for medium-range kinematic positioning. In: Proc. ION GPS 2000, Institute of Navigation, Salt Lake City, UT, USA, September 19–22, 1071–1080
Ge H, Li B, Ge M, Zang N, Nie L, Shen Y, Schuh H (2018) Initial assessment of precise point positioning with LEO enhanced global navigation satellite systems (LeGNSS). Remote Sens 10(7):984
Guo K, Aquino M, Veettil SV (2019) Ionospheric scintillation intensity fading characteristics and GPS receiver tracking performance at low latitudes. GPS Solut 23(2):43
Hu J, Zhang X, Li P, Ma F, Pan L (2019) Multi-GNSS fractional cycle bias products generation for GNSS ambiguity-fixed PPP at Wuhan University. GPS Solut 24(1):15
Irsigler M, Hein GW, Schmitz-Peiffer A (2004) Use of C-band frequencies for satellite navigation: benefits and drawbacks. GPS Solut 8(3):119–139
IS-GPS-200 (2010) Interface specification: Navstar GPS space segment/navigation user interfaces, IS-GPS-200, Revision E, GPS Wing (GPSW) Systems Engineering and Integration, June 8
Issler JL, Paonni M, Eissfeller B (2010) Toward centimetric positioning thanks to L- and S-band GNSS and to meta-GNSS signals. In: Proceedings of the 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, Toulouse, France, December 8–10, 1–8
ITU-R (2005) Specific attenuation model for rain use in prediction methods. ITU-R Recommendation P.838–3
ITU-R (2009) Attenuation due to clouds and fog. ITU-R Recommendation P.840–4
ITU-R (2013) Attenuation by atmospheric gases. ITU-R Recommendation P.676–10
ITU-R (2015) Propagation data and prediction methods required for the design of earth-space telecommunication systems. ITU-R Recommendation P.618–12
Kouba J (2009) A guide to using International GNSS Service (IGS) products. http://www.acc.igs.org/UsingIGSProductsVer21.pdf
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 56(2):135–149
Lawrence D, Cobb HS, Gutt G, Connor MO, Reid TGR, Walter T, Whelan D (2017) Innovation: navigation from LEO. GPS World, June 2017
Li X, Ma F, Li X, Lv H, Bian L, Jiang Z, Zhang X (2019) LEO constellation-augmented multi-GNSS for rapid PPP convergence. J Geod 93(5):749–764
Lu M, Yao Z, Zhang J, Guo F, Wei Z (2015) Progress and development trend of signal design for BeiDou satellite navigation system. Satell Appl 12:27–31 (in Chinese)
Ma F, Zhang X, Li X, Cheng J, Guo F, Hu J, Pan L (2020) Hybrid constellation design using a genetic algorithm for a LEO-based navigation augmentation system. GPS Solut 24(2):62
Mateu I, et al. (2009) Exploration of possible GNSS signals in S-band. In: Proc. ION GNSS 2009, Institute of Navigation, Savannah, GA, USA, September 22–25, 1573–1587
Reid TGR, Neish AM, Walter TF, Enge PK (2016) Leveraging commercial broadband LEO constellations for navigation. In: Proc. ION GNSS+ 2016, Institute of Navigation, Portland, OR, USA, September 12–16, 2300–2314
Sun Y, Xue R, Zhao D, Wang D (2017) Radio frequency compatibility evaluation of S band navigation signals for future BeiDou. Sensors 17(5):1039
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J Geod 70(1–2):65–82
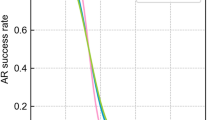
Teunissen PJG, Joosten P, Tiberius CCJM (1999) Geometry-free ambiguity success rates in case of partial fixing. In: Proc. ION NTM 1999, Institute of Navigation, San Diego, CA, USA, January 25–27, 201–207
Van Dierendonck AJ, Klobuchar J, Hua Q (1993) Ionospheric scintillation monitoring using commercial single frequency C/A code receivers. In: Proc. ION GPS 1993, Institute of Navigation, Salt Lake City, UT, USA, September 22–24, 1333–1342
Wang L et al (2019) Initial assessment of the LEO based navigation signal augmentation system from Luojia-1A satellite. Sensors 18(11):3919
Xie J, Kang C (2021) Engineering innovation and the development of the BDS-3 navigation constellation. Engineering 7(5):558–563
Xue R, Sun Y, Zhao D (2015) CPM signals for satellite navigation in the S and C bands. Sensors 15(6):13184–13200
Yang Y (2016) Concepts of comprehensive PNT and related key technologies. Acta Geod Cartogr Sin 45(5):505–510 (in Chinese)
Yao Z, Lu M, Feng Z (2010) Quadrature multiplexed BOC modulation for interoperable GNSS signals. Electron Lett 46(17):1234–1236
Zhang X, Ma F (2019) Review of the development of LEO navigation-augmented GNSS. Acta Geod Cartogr Sin 48(9):1073–1087 (in Chinese)
Zhao Q, Li X, Liu Y, Geng J, Liu J (2018) Undifferenced ionospheric-free ambiguity resolution using GLONASS data from inhomogeneous stations. GPS Solut 22(1):26
Acknowledgements
The authors warmly thank Prof. Mingquan Lu at Tsinghua University and Dr. Ye Tian at China Academy of Space Technology for their valuable suggestions, proactive support and interest in this work. This study is financially supported by the National Science Fund for Distinguished Young Scholars (No. 41825009), a Wuhan Science and Technology Project (No. 2018010401011270), and the Changjiang Scholars program. In addition, the numerical calculations in this paper have been done on the supercomputing system in the Supercomputing Center of Wuhan University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
PSD expressions of CPM signals
The autocorrelation function of a CPM signal can be expressed as:
where \(T\) is the symbol duration, and \(\tau\) is the correlation time. \(L\) is the pulse length. \(M\) is the modulation order indicating that the data are \(M\)-ary symbols. \(h\) is the modulation index; only if \(h\) > 1, spectrum splitting can appear, and the larger the index is, the farther the distance between two main lobes, otherwise, the power spectra has only one main lobe. Note that though a longer \(L\) and a bigger \(M\) can effectively decrease the amplitude of side lobes, sometimes the feature of spectrum splitting may lose even if \(h\) > 1. \(q\left( t \right)\) is the phase response function depends on the shape of the corresponding frequency pulse, for a rectangular pulse, we have
while for a raised-cosine pulse, we have
where \(t\) is the time. Due to the smoother waveform, the raised-cosine pulse contributes to a stronger spectrum roll-off in side lobes than the rectangular one. Then, the PSD of a CPM signal derived from Fourier transformation of \(\Re \left( \tau \right)\) is written as:
with
where \(f\) is the frequency. The parameters \(T\), \(M\), \(L\), \(h\) and \(q\left( t \right)\) codetermine the spectral characteristics, and the specific configurations for proposed CPM signals are given in Table
6.
Rights and permissions
About this article

Cite this article
Ma, F., Zhang, X., Hu, J. et al. Frequency design of LEO-based navigation augmentation signals for dual-band ionospheric-free ambiguity resolution. GPS Solut 26, 53 (2022). https://doi.org/10.1007/s10291-022-01240-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-022-01240-4