
Abstract
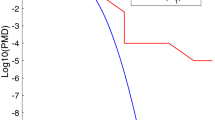
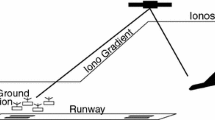
The ground-based augmentation system (GBAS) includes a ground monitor designed to protect against a code carrier divergence (CCD) fault originating from the satellite payload. The current single-frequency GBAS solutions known as GBAS approach service types (GAST) C and D which support Category I and Category II/III precision approaches, respectively, both utilize this monitor, but it has been noted that the test metric is subject to non-Gaussian tails as a result of nominal ionospheric errors. It has been observed that the ionospheric delay seen at low elevations can trigger alarms which are not distinguishable from the payload fault and thus impact the continuity and availability of GAST-D. The future GAST-F concept is designed to meet Category II/III precision approach using multi-frequency measurements which allows the CCD monitor proposed to be free of ionospheric influence. In order to address the full threat space, the combination of three ionospheric-free statistics is needed to form the test metric. This test metric is characterized through a combination of empirical multi-frequency data analysis and theoretical derivations leading to an approximately diagonal covariance matrix consisting of standard deviations 0.0017, 0.0050 and 0.0046 m/s, compared to 0.00399 m/s for the current single-frequency GAST-D design. Results from extensive simulations assessing the monitor’s integrity performance are then provided which show superior performance to the existing design. The proposed GAST-F monitor detects a divergence less than half the size of the GAST-D one, with the same probability of missed detection. Under the GAST-F concept, the aircraft may be operating in ionospheric-free smoothing mode which leads to inflation of the divergence impacts for much of the threat space and degrades the performance of all potential CCD monitors. It is shown that a longer delay is required for the incorporation of a smoothed ranging measurement into the solution. The worst-case fault mode requires a delay of 132 s over the current value 50 s.

















Similar content being viewed by others
References
Brenner M, Liu F (2010) Ranging source fault detection performance for category III GBAS. In: Proceedings of ION GNSS 2010, Institute of Navigation, Portland, 21–24 Sept, pp 2618–2632
DO-229D (2006) Minimum operational performance standards for global positioning system/wide area augmentation system airborne equipment, RTC
DO-253C (2008) Minimum operational performance standards for GPS local area augmentation system airborne equipment, RTCA
EASA (2003) CS-AWO, joint aviation requirements—all weather operations, Subpart 1, Automatic Landing Systems
ED-114A (2013) Minimum operational performance specification for global navigation satellite ground based augmentation system ground equipment to support category I operations, EUROCAE
FAA (1999) Advisory circular 120-28D, criteria for approval of category III weather minima for takeoff, landing and rollout. FAA, Washington
Gao Y, Li Z (1999) Cycle slip detection and ambiguity resolution algorithms for dual-frequency GPS data processing. Mar Geod 22(3):169–181
Gleason S, Gebre-Egziabher D (2009) GNSS applications and methods, Artech House, ISBN 1-596-93329-1
Hatch R (1982) The synergism of GPS code and carrier measurements. In: Proceedings of the third international symposium on satellite Doppler positioning at physical sciences laboratory of New Mexico State University, 8–12 Feb, vol. 2, pp 1213–1232
Hwang PY, McGraw GA, Bader JR (1999) Enhanced differential GPS carrier-smoothed code processing using dual-frequency measurements. Navigation 46(2):127–138
Johnson NL, Kotz S, Balakrishnan N (1970) Continuous univariate distributions, vol 2. Wiley, New York ISBN 0-471-58494-0
Kay S (1998) Fundamentals of statistical signal processing, volume II: detection theory. Prentice Hall, Upper Saddle River
Milner C, Guilbert A, Macabiau C (2015) Evolution of corrections processing for the MC/MF ground based augmentation system (GBAS). In: Proceedings of ION ITM 2015, Institute of Navigation, Dana Point, California, 26–28 Jan, pp 364–373
Murphy T (2002) Development of signal in space performance requirements for GBAS to support CAT II/III landing operations. In: Proceedings of ION GPS 2002, Institute of Navigation, Portland, 24–27 Sept, pp 20–28
Rife J (2012) Overbounding missed-detection probability for a Chi square monitor. In: Proceedings of ION GNSS 2012, Institute of navigation, Nashville, 17–21 Sept, pp 1348–1368
SARPs (2009) GBAS CAT II/III development baseline SARPs, ICAO NSP. http://www.icao.int/safety/airnavigation/documents/gnss_cat_ii_iii.pdf
Simili DV, Pervan B (2006) Code-carrier divergence monitoring for the GPS local area augmentation system. In: Proceedings of PLANS, IEEE/ION position, location, and navigation symposium, San Diego, 25–27 Apr, pp 483–493
Stakkeland M, Andalsvik Y, Jacobsen K (2014) Estimating satellite excessive acceleration in the presence of phase scintillations. In: Proceedings of ION GNSS 2014, Institute of Navigation, Tampa, 8–12 Sept, pp 3532–3541
Tang H, Pullen S, Enge P, Gratton L, Pervan B, Brenner M, Scheitlin J, Kline P (2010) Ephemeris type A fault analysis and mitigation for LAAS. In: Proceedings of PLANS, IEEE/ION position, location, and navigation symposium, Indian Wells, 4–6 May, pp 654–666
Acknowledgments
This work is funded by SESAR Joint Undertaking within the frame of the Single European Sky ATM Research (SESAR) Program. The authors would like to thank Thales Electronic Systems for the use of collected data under the SESAR Program.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jiang, Y., Milner, C. & Macabiau, C. Code carrier divergence monitoring for dual-frequency GBAS. GPS Solut 21, 769–781 (2017). https://doi.org/10.1007/s10291-016-0567-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-016-0567-4