
Abstract
Sheep model is the most favourable choice for animal study for functional evaluation of the cervical fusion prostheses before clinical application; however, significantly large differences between sheep and human existed in terms of morphological characteristics and daily-activity motions. Questions should be raised as whether the differences between the two species have influence on the reliability of sheep model. Finite element models (FEM) of the cervical spinal system were built to characterize the differences between the two species with respect to the range of motion (ROM) and biomechanical behaviour, and experimental cadaver tests on both species were employed for validation purposes. Results indicate that sheep model represents the worst-case scenario of the human model with exaggerated stresses (up to 3 times more) and ROM (up to 10 times more). Moreover, sheep model is very sensitive to the variation of prostheses design, whilst human model does not, which denotes that the sheep model provides a rather amplified effect of a certain design for its biomechanical performance. Therefore, caution needs to be taken when sheep models were used as the animal model for functional evaluation over various design, and the FEM built in this study can be employed as an effective methodology for performance evaluation of cage prostheses of cervical spine.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Artificial interbody fusion cage prostheses have been widely used for the functional reconstruction of cervical spines. Animal tests are normally the routine and critical pre-clinical tests carried out for new materials or designs of cervical fusion prostheses. Owing to the similarities in anatomic structure, lordosis, material properties, and biomechanics between the sheep cervical spine (SCS) and the human cervical spine (HCS) (Wilke et al. 1997), the SCS was usually chosen for in vivo and in vitro experiments (Daentzer et al. 2015; Kandziora et al. 2001a; Li et al. 2015; Yamada et al. 2015). However, differences between these species do exist in the geometric morphology and dimension of vertebrae, e.g. sheep cervical vertebrae do not have uncovertebral joints like human ones do, and the superior endplate of a sheep’s cervical vertebral body is convex, whereas that of a human’s cervical vertebral body is concave (Fig. 1a). In addition, the height of a sheep cervical vertebral body is almost three times that of a human, and the disc space is larger in the SCS than in the HCS; details of these differences are summarized in Fig. 1b (Kandziora et al. 2001b). Therefore, questions have been raised as whether the differences between the SCS and the HCS influence the reliability of employing the sheep as the animal model for the HCS in pre-clinical tests.

Summarized differences between the sheep cervical spine and the human cervical spine: a anatomic structure; b anatomic parameters. VBHa: anterior vertebral body height, VBHp: posterior vertebral body height, EPDu: upper endplate depth, EPDl: lower endplate depth, EPWu: upper endplate width, EPWl: lower endplate width, DSHm: mean disc space height (Kandziora et al. 2001b)
In the literature, animal tests have normally been evaluated via imaging, histology, and biomechanical analyses (Hong et al. 2014; Li et al. 2015; Yamada et al. 2015). μCT scanning images have been used to evaluate the fusion levels, histological tests have been carried out to determine bone in-growth levels, and biomechanics analyses have been carried out to evaluate the range of motion (ROM) and stability of the systems. The evaluation results from such imaging and histology analyses were highly affected by the characteristics of the biomechanics of the systems. The differences between the geometrical characteristics of the spinal vertebrae of the sheep and human species may result in differences in the biomechanics of the system, which would consequently lead to differences between the evaluation results obtained from the imaging and histological methodologies.
There are very little quantitative data in the literature on the biomechanics of the SCS fusion in comparison with that for HCS fusion. However, it is important to understand how well a sheep model can represent a human model for cervical fusion surgeries in terms of the biomechanics and kinetics of the cervical spine in order to evaluate the performance of the prostheses for the pre-clinical tests in a more accurate manner. Therefore, the aim of this study was to investigate the differences between the human and sheep cervical model from the viewpoint of cervical fusion surgery when performing daily activities, by employing finite element method (FEM) and mechanical tests. This study may offer some important insights into performing functional evaluations of the interbody fusion cage using animal models.
2 Materials and methods
In this study, finite element models of cervical spine for both human and sheep are constructed from μCT scanning data (ethics committee of the Fourth Military University Hospital of China). Based on the constructed model, biomechanics of the spinal discs were studied for both species in the intact manner. Then, the models with the designed PEEK interbody fusion cage in situ were constructed for both species to study the biomechanics between the discs and the surrounding tissue when undergoing various physiological loading environments.
2.1 Finite element model construction
Three-dimensional, nonlinear FE models of the human C4–C5 motion segment and the sheep C3–C4 motion segment were built separately from a μCT image dataset of cadaveric specimens (4 months old, 50 kg). The sheep C3–C4 motion segment was chosen in particular because it is the most reliable model for the corresponding human motion segment (Kandziora et al. 2001b), and the human C4–C5 motion segment (56-year-old female, 50 kg) was chosen because it is similar to other segments in the HCS model (Panzer and Matthew 2006). A three-dimensional model was constructed from the stack of CT images using MIMICS 16.0 (Materialise, Leuven, Belgium) and was subsequently smoothed in Geomagic Studio 12.0 (Geomagic, Inc, Research Triangle Park, NC, USA) for removing the uneven surfaces, sharp corners, etc. A model of the intervertebral disc between the two adjacent vertebrae was created in Geomagic based on the space between the two adjacent bottom endplates of the two vertebrae models by employing a cylindrical geometry, from which the annulus ground and nucleus were partitioned.
The models of the vertebrae and intervertebral disc were meshed using HyperMesh v12.0 (Altair, California, USA). A vertebra model consists of a vertebral body and a posterior part, and the vertebral body is composed of a cancellous core and a cortical shell with a thickness of 0.5 mm (Ha 2006). The cortical bone of the vertebral body was meshed using the six-node triangular prism element (C3D6), and the cancellous bone was meshed using the four-node tetrahedral element (C3D4). Both endplates of the vertebral body were considered to be cortical bone. The intervertebral discs were also meshed using the C3D4 element. Five primary ligaments (anterior longitudinal ligament (ALL), posterior longitudinal ligament (PLL), flaval ligament (FL), facet capsular ligament (CL), and interspinous ligament (ISL)) were modelled using three-dimensional truss elements (T3D2) corresponding to the tensile stresses only (Faizan et al. 2012). The material properties of each component of the model were taken from the literature (DeVries 2011; Galbusera et al. 2006; Kallemeyn et al. 2010; Natarajan et al. 2000; Zhang et al. 2006), as shown in Table 1. The facet cartilage joints were modelled as contacts with a coefficient of friction of 0.1 and an initial gap of 0.5 mm in the HCS model, whereas the ‘softened contact’ of an exponential pressure–overclosure relation with an initial gap of 0.5 mm was set for the facet cartilage joints of the SCS model (Faizan et al. 2012).
For the intact HCS model, the inferior surface of the C5 vertebral body was fully constrained, and a vertical load of 50 N was applied axially on the superior surface of the C4 vertebral body to simulate the weight of the head. A flexion–extension (FLX–EXT) moment of 1.0 Nm, a left–right lateral bending (LLB–RLB) moment of 1.0 Nm, and a left–right axial rotational (LAR–RAR) moment of 1.0 Nm were imposed individually on to the C4 body to carry out multi-activity simulations. For the intact SCS model, the inferior surface of the C4 vertebral body was fully constrained, and moments of 2.5 Nm for various bending motions and rotational orientations were imposed to the superior surface of the C3 vertebral body (Wilke et al. 1997). FE analyses were performed using Abaqus 6.14 (SIMULIA, Providence, RI, USA).
Mesh convergence was carried out on both the HCS and the SCS models for verification purposes. The results indicated that a global element size of 1 mm (104,596 elements for HCS, and 269,858 elements for SCS) was good enough for both the HCS and SCS models to keep the numerical error of von Mises stress below 5%. The intact models of the HCS and the SCS were validated via mechanical tests on cadaveric samples.
2.2 FE model with interbody fusion cage
Based on the aforementioned intact HCS and SCS models, the primary postoperative ACDF model was created by removing the original intervertebral disc and replacing it with the designed interbody fusion cage embedded with graft bone to simulate the surgical procedure (Natarajan et al. 2000). In this study, two types of the most popular interbody fusion cages were studied: the flat box-shaped cage (FBC) and the curved box-shaped cage (CBC), as shown in Fig. 2.

FE model set-up of sheep cervical spine (C3–C4, left) and human cervical spine (C4–C5, right) after interbody fusion cage insertion (FBC: flat box-shaped cage, CBC: curved box-shaped cage)
The material properties of the cage were set to be those of polyetheretherketone (PEEK) in order to be consistent with a previous mechanical test (Vadapalli et al. 2006), which used a PEEK cage manufactured via 3D printing technology (Fig. 3f/g). The material properties of the graft were set to be those of the tricortical iliac crest bone graft. The material properties for all components were assumed to be linear elastic and isotropic, as shown in Table 1. Additionally, the contact surfaces between the vertebra body and the cage with graft bone were assumed to be fully integrated into each other; therefore, a ‘TIE’ contact pair was set up for both surfaces to prevent relative movements.

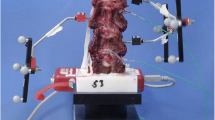
Set-up for the mechanical tests on the sheep and human cervical spine models: a testing set-up of an intact cervical spine; b cadaveric specimen of a sheep cervical spine; c cadaveric specimen of a human cervical spine; d the testing set-up of the fusion cervical spine; e pressure mapping sensor; f designed model of the non-grafted interbody fusion cage; g printed PEEK interbody fusion cage
The same boundary conditions to those of the intact model were applied to the fusion vertebral models of both human and sheep. Moreover, for the fusion models, an additional force of 40 N was applied to the disc replacement axially, simulating a prestressed situation between both endplate surfaces and the cage (Natarajan et al. 2000) (Fig. 2). Validation of the fusion HCS and SCS models was carried out via mechanical testing in vitro, and a non-grafted cage (solid cage without bone graft) (Fig. 3g) was used to simplify the surgery process.
2.3 In vitro experiments
Three cervical vertebra samples of the C3–C4 segment were dissected from three adult sheep supplied freshly by a local abattoir, and three human cadaveric cervical vertebra samples were provided by the Fourth Military Medical University with full documentation of the informed consent from the ethics board. Samples with important ligament and muscle tissue attached were prepared in saline one hour before the mechanical tests. μCT scanning on the samples was carried out to provide a model for the FE analyses as well as to ensure that the specimens did not contain any abnormal spinal pathologies. The top and bottom ends of the samples were fully constrained (zero degrees of freedom) by potting them into two predesigned fixture using bone cement. Therefore, the rest of the components could maintain a flexibility similar to that of the natural spine.
A multi-functional joint simulator (VIVO, AMTI, USA) (Fig. 3a) was employed to provide the specified loading and motion, simulating those of the natural spine with a maximum load magnitude of 4.5 kN along the Z direction, a maximum flexion angle of ± 100° along the X direction, a maximum abduction angle of ± 30° along the Y direction, and a maximum rotational motion of ± 40°. According to the set-up of the intact SCS model, the load of a bending moment of 2.5 Nm was applied towards the X+ direction at a rate of 5.0 Nm/min until up to 2.5 Nm (DeVries et al. 2012) to simulate lateral bending in response to the X+ motion of the spine. Under such a loading environment, the C3–C4 vertebral body specimens were forced to bend laterally and then fully recovered their natural posture when the loading system was withdrawn. Other motions, such as lateral bending in the X−, Y+, and Y-directions and rotational motion along the Z direction, could be implemented in the same manner (Fig. 3b). The maximum angular displacements of C3 relative to C4 were recorded when the exerted loading magnitudes reached their maximum value, and those displacements were taken as the range of motion (ROM) of the sample for each individual motion. Moreover, the stresses between the interface of the non-grafted cage and the superior endplate of C4 were measured and collected during the simulation tests via a pressure-mapping sensor (Tekscan, South Boston, Massachusetts, USA, 4000) (Fig. 3d, f). Data collected from the very first two cycles of motion were discarded to minimize the effects of creep and chalasis of the soft tissue and ligaments. Mechanical tests on the human cadaveric samples were carried out by following the exact same procedure outlined above, and the loading set-up was consistent with the set-up of the FE model, as shown in Fig. 3c, e.
2.4 Statistical analysis
The data of ROM and contact pressure derived from experimental tests were analysed using SPSS 18.0 (IBM, USA), and a single factor ANOVA (α = 0.05) was used for the statistical analysis.
3 Results
3.1 Validation of the finite element analyses
FE analyses (FEA) were carried out to determine the ROM of the human and sheep vertebrae models for various activities. The results were compared with those determined via mechanical tests, as shown in Fig. 4. Good agreements were found between the experimental tests and the FEA results for both the human and sheep models. However, under lateral bending, significant differences could be observed between the human and sheep models.

Comparison of an intact sheep (S) cervical spine (C3–C4) and an intact human (H) cervical spine (C4–C5) under flexion (FLX), extension (EXT), left lateral bending (LLB), right lateral bending (RLB), left axial rotation (LAR), and right axial rotation (RAR) in terms of the range of motion. H-FEA, finite element analyses for the human model; H-EXP, experimental results for the human model; S-FEA, finite element analyses for the sheep model; S-EXP, experimental results for the sheep model. ‘*’ denotes a significant difference (p < 0.05); ‘**’ denotes an extremely significant difference (p < 0.01)
Comparisons were made between the human and sheep models with the prostheses in situ, as shown in Fig. 5. The results indicate significant differences between the FEAs and the experimental tests for both the human and sheep models. However, a better agreement was achieved between the mechanical tests and the FEA for the human model. In addition, significant differences were observed between the human and sheep models in terms of almost all the daily activities tested for according to the mechanical test results; the FEA results were in good agreement with them.

Comparisons of the biomechanical behaviours of the human and sheep models under flexion (FLX), extension (EXT), left lateral bending (LLB), right lateral bending (RLB), left axial rotation (LAR), and right axial rotation (RAR) with respect to a their range of motion and b the maximum von Mises stress of the superior endplate of the lower vertebra. H-FEA, finite element analyses for the human model; H-EXP, experimental results for the human model; S-FEA, finite element analyses for the sheep model; S-EXP, experimental results for the sheep model. ‘*’ denotes a significant difference (p < 0.05); ‘**’ denotes an extremely significant difference (p < 0.01)
3.2 Biomechanical characterization of the differences between the human and sheep models
Based on previous validated FE models of human and sheep cervical spine systems with artificial fusion cages inserted into them, the biomechanics of the fusion models were studied by employing two types of fusion cage: a flat one and a curved one. The differences between the two species in terms of their ROM and the stresses generated in both endplates were determined (Fig. 6).

Comparisons of the biomechanical behaviours of the human and sheep models under flexion (FLX), extension (EXT), left lateral bending (LLB), right lateral bending (RLB), left axial rotation (LAR), and right axial rotation (RAR) with respect to a their range of motion and b the maximum von Mises stress of the inferior endplate of the upper vertebra
Compared with the intact model, the fusion model was found to have a smaller ROM for both the human and sheep models. For the flat cage group, the ROM for the sheep fusion model was 2.42°–8.18°, whereas the ROM for the human fusion model was 0.75°–2.45°, which is from one to six times that of the sheep model. For the curved cage group, the ROM for the sheep fusion model was 1.24°–2.48°, whereas the ROM for the human fusion model was 0.58°–1.77°, which is from one to three times that of the sheep model. Significant differences were observed between the sheep and human models in the lateral bending activities; however, minimum variance was found between the two species during flexion and extension. Even for the same species, e.g. in the sheep model, the flat cage was associated with one to four times the ROM of that of the curved cage model. However, in the human model, the flat cage showed from one to two times the ROM of the curved one.
Compared with the intact model, higher stresses were generated in the fusion model for both human and sheep. For the flat cage group, the von Mises stresses on the endplates were 33–84 MPa in the sheep model and 13–29 MPa in the human model. The maximum variance of the stresses on the endplates was predicted in the human and sheep models under lateral bending. The stresses generated in the sheep model were 1.7–3.4 times those of the human model. However, minimum variance was found between the two species in terms of the stresses generated on the endplates under flexion/extension.
For the curved cage group, the von Mises stresses generated on the endplates were 21–40 MPa for the sheep model and 8–18 MPa for the human model, which is from two to four times that of the sheep model. Moreover, the maximum variance was found between the two species in terms of the stresses on the endplates under flexion/extension, but minimum variance was found under lateral bending, which reflects the opposite behaviour to that of the flat cage group.
For the sheep model, the stresses generated on the endplates of the flat cage model were found to be 1.2–2.4 times those of the curved cage group, and larger differences were observed between the two groups under lateral bending compared with flexion/extension. For the human model, the stresses generated on the endplates of the flat case model were found to be 1.4–2.6 times of the curved cage model, but larger differences were observed between the stresses generated under lateral bending and flexion/extension compared with rotation.
Contour plots of the stress distribution on the endplates in the flat cage and curved cage models are summarized in Fig. 7 for both the human and sheep models. The results indicate that stresses were mainly exerted on the interfaces between the endplates and the cage. In the flat cage group, the stress was mainly distributed at the anterior edge of the endplate for the sheep model, whereas it was mainly distributed at the posterior and anterior edges of the endplate for the human model. In the curved cage group, the stress was mainly generated in the anterior region of the endplates for the sheep model, whereas it was in the outskirt region of the endplates for the human model. Overall, for both species, the curved model offered more evenly distributed stresses than the flat model.

Contour plots of the contact area between the vertebral body and the inferior endplate for the sheep cervical spine (SCS) and the human cervical spine (HCS) under different loading directions after flat box-shaped cage (flat) and curved box-shaped cage (curved) insertion (Pca represents the percentage of the contact area over the whole endplate for strains between 0.0010 and 0.005; S. Max represents the maximum von Mises stress of the whole endplate; ROM represents the range of motion of the fusion cervical spine)
It has been reported in the literature that the osteoblast and osteoclast can maintain balance when the applied micro-strain is within the range of 1000–1500 µɛ (Duncan and Turner 1995; Frost 1987). Therefore, micro-strains within that range were presented in the contour plots for both endplates in Fig. 7. In addition, the percentage of the effective strain area over the total area of the endplate was calculated (Pca) to denote the possible bone in-growth area.
4 Discussion
Animal tests and the sheep model in particular have normally been employed to evaluate the functional performance and viability of fusion cage prostheses for cervical spine fusion (Drespe et al. 2005). However, large differences exist between the sheep and human species in terms of the geometrical characteristics and the biomechanics of their cervical spine systems, and differences in the normal daily activities between the two species make it rather difficult for the sheep model to fully represent a human model. FE models of both species were constructed to characterize the biomechanical/kinematics differences between the two species in terms of range of motion and contact stresses. In addition, the fused model with designed flat/curved spinal discs placed in situ was also studied for both species to gain better insight into the fitness performance of the sheep model when used for the design and evaluation of human prostheses.
Significant differences were found between the human spinal disc and the ovine spinal disc with respect to their geometrical characteristics (Kandziora et al. 2001b). These differences might be exacerbated by the rather larger ROM of the daily activities of sheep compared with those of humans. Among all the activities considered, lateral bending (LLB/RLB) is the most representative motion to distinguish the sheep model from the human model, where the ROM of the former is nearly four times that of the latter, as shown in the experimental results obtained from the intact models of the two species. For flexion–extension (FLX/EXT), the ROM of the sheep model is predicted to be 1.5 times that of the human model. However, in terms of internal/external rotation, both species have similar a ROM. The differences between the two species were amplified after the fusion surgery, as determined from the fusion model with the natural spinal disc replaced by a 3D-printed PEEK cage. For all kinds of motions, the ROM of the human fusion spine model was reduced to almost zero. In comparison, the ROM of the sheep fusion model was reduced to 70% for lateral bending and 60% for flexion–extension, and the ROM for internal/external rotation remained similar to that of the intact sheep model (Fig. 5). In addition to the results obtained for the ROMs, the stresses generated in the superior endplate of the human fusion model were found to be 50% of those in the sheep model for flexion/extension and 40% for internal/external rotation, whereas they were found to be 60% for the lateral bending movement. Therefore, extremely large differences existed between the two species with respect to the fusion model, which may clearly explain the smaller fusion rates reported in the literature to be 33.3–83.3% (Li et al. 2014; Schreiner et al. 2007; Slivka et al. 2006) for the sheep model compared with those for the human model (89.7–97.9%) (Cauthen et al. 2003; Hacker et al. 2000; Moreland et al. 2004). Thus, the sheep model represents the worst-case scenario when employed for the functional evaluation of fusional prostheses.
Moreover, two fusion disc designs, a flat one and a curved one, were employed to investigate the effectiveness of the sheep model for representing the human model for the functional evaluation of different fusion disc designs. The results indicate that the different designs caused no significant differences in the human fusion model with respect to the ROMs. However, a dramatic drop (75%) was observed in the ROMs for the curved design compared with the flat design in the sheep fusion model (Fig. 6). This means that the sheep model could be really sensitive to disc design, and the curved disc was associated with better fusion performance than the flat disc Therefore, with respect to ROM, the sheep model may not accurately represent the human model.
When comparing the predicted maximum von Mises stresses exerted to the inferior endplate of the upper vertebra for the fused models of the two species with the two designs, similar trends were found in the human as well as in the sheep fusion model with respect to the effects of the fusion cage. In the human model, the curved disc was associated with smaller stresses compared with the flat one: a 50% drop for flexion/extension, a 60% drop for lateral bending, and a 30–40% drop for internal/external rotation were observed (Fig. 6). This indicates that both the human and sheep models are sensitive to the design of the fusion body with respect to the von Mises stresses generated in the host bone, which makes the sheep model a fairly good candidate for animal studies on the functional evaluation of fusion prostheses in the spine. However, the larger magnitude of the stresses exerted in the sheep fusion model can also increase the effect of osteoclasts and consequently cause the failure of the evaluated prostheses. In such cases, more caution should be exercised when using the sheep model to evaluate the functional biomechanical performance of a fusion body, and a design with a better fit to the intact residual bone may provide fairly better representative results.
In the sheep model, similar trends but relatively smaller drops were found for all kinds of activities. In addition, the predicted effective contact area (Pca) between the vertebral body and the inferior endplate in the sheep fusion model was found to be quite sensitive to the design used (Fig. 7); the curved design is the more favourable one and is associated with a Pca three to four times that of the flat design. Whereas the differences between the two designs in the human fusion model were not as significant as those in the sheep model, the curved one is associated with a Pca less than 30% of that for the flat design for some movements. The sensitivity of the fusion model to different designs of the fusion cage was extremely amplified in the sheep model, which makes the sheep model a very good indicator of the better design. On the other hand, the extremely enlarged magnitude of the stresses and contact area may also contribute to the loosening and subsidence of the fusion body. Researchers must be aware of the conflicts between the benefits and disadvantages of the application of the sheep model to make more pertinent evaluations for pre-clinical tests.
There were certain limitations in the present study. First, the models studied here include only two adjacent cervical spinal discs instead of the complete cervical spine system, consequently neglecting the effects of the neighbouring components. Secondly, the stiffness and modulus of the ligaments associated with the cervical spine system studied here were taken from the literature; therefore, the effects that result from the gait characteristics of daily activities were not considered, which might have caused a certain degree of prediction error in our biomechanics characterizations.
5 Conclusions
In this study, the biomechanical characteristics of the cervical spine systems of the sheep and human species were studied and compared to quantify the effectiveness of the sheep model for representing the human model during the functional evaluation of fusion cage protheses. Owing to the significantly large differences between the two species with respect to their geometrical characteristics and the motions of daily activities, the sheep model may represent the worst-case scenario of the human model with exaggerated stresses, contact area, and ranges of motion. Moreover, the sheep model is much more sensitive to differences in prostheses design than the human model, which means that the sheep model might provide a rather amplified effect for the biomechanical performance of different designs. Caution should be exercised when the sheep is used as the animal model for the functional evaluation of various designs, and the finite element models built in this study can be employed as an effective methodology for the performance evaluation of cage prostheses of the cervical spine.
References
Cauthen JC, Theis RP, Allen AT (2003) Anterior cervical fusion: a comparison of cage, dowel and dowel-plate constructs. Spine J 3:106–117
Daentzer D, Welke B, Hurschler C, Husmann N, Jansen C, Flamme CH, Richter BI (2015) In vitro -analysis of kinematics and intradiscal pressures in cervical arthroplasty versus fusion—a biomechanical study in a sheep model with two semi-constrained prosthesis. Biomedical Engineering Online 14:1–15
DeVries NA (2011) The biomechanics of the sheep cervical spine: an experimental and finite element analysis. University of Iowa, Iowa
DeVries NA, Gandhi AA, Fredericks DC, Grosland NM, Smucker JD (2012) Biomechanical analysis of the intact and destabilized sheep cervical spine. Spine (Phila Pa 1976) 37:E957–E963. https://doi.org/10.1097/brs.0b013e3182512425
Drespe IH, Polzhofer GK, Turner AS, Grauer JN (2005) Animal models for spinal fusion. Spine J 5:209S–216S. https://doi.org/10.1016/j.spinee.2005.02.013
Duncan RL, Turner CH (1995) Mechanotransduction and the functional response of bone to mechanical strain. Calcif Tissue Int 57:344–358
Faizan A et al (2012) Do design variations in the artificial disc influence cervical spine biomechanics? A finite element investigation. Eur Spine J 21:653–662
Frost HM (1987) Bone “mass” and the “mechanostat”: a proposal. Anat Rec 219:1–9. https://doi.org/10.1002/ar.1092190104
Galbusera F, Fantigrossi A, Raimondi MT, Sassi M, Fornari M, Assietti R (2006) Biomechanics of the C5–C6 spinal unit before and after placement of a disc prosthesis. Biomech Model Mechanobiol 5:253–261. https://doi.org/10.1007/s10237-006-0015-4
Ha SK (2006) Finite element modeling of multi-level cervical spinal segments (C3–C6) and biomechanical analysis of an elastomer-type prosthetic disc. Med Eng Phys 28:534–541. https://doi.org/10.1016/j.medengphy.2005.09.006
Hacker RJ, Cauthen JC, Gilbert TJ, Griffith SL (2000) A prospective randomized multicenter clinical evaluation of an anterior cervical fusion cage. Spine (Phila Pa 1976) 25:2646–2654
Hong X, Wu XT, Zhuang SY, Bao JP, Shi R (2014) New cage for posterior minimally invasive lumbar interbody fusion: a study in vitro and in vivo. Orthop Surg 6:47–53. https://doi.org/10.1111/os.12083
Kallemeyn N, Gandhi A, Kode S, Shivanna K, Smucker J, Grosland N (2010) Validation of a C2–C7 cervical spine finite element model using specimen-specific flexibility data. Med Eng Phys 32:482–489. https://doi.org/10.1016/j.medengphy.2010.03.001
Kandziora F, Pflugmacher R, Schafer J, Born C, Duda G, Haas NP, Mittlmeier T (2001a) Biomechanical comparison of cervical spine interbody fusion cages. Spine (Phila Pa 1976) 26:1850–1857
Kandziora F, Pflugmacher R, Scholz M, Schnake K, Lucke M, Schroder R, Mittlmeier T (2001b) Comparison between sheep and human cervical spines—an anatomic, radiographic, bone mineral density, and biomechanical study. Spine 26:1028–1037. https://doi.org/10.1097/00007632-200105010-00008
Li Y et al (2014) A polycaprolactone–tricalcium phosphate composite scaffold as an autograft-free spinal fusion cage in a sheep model. Biomaterials 35:5647–5659. https://doi.org/10.1016/j.biomaterials.2014.03.075
Li XH, Song YM, Duan H (2015) Reconstruction of segmental stability of goat cervical spine with poly(d,l-lactic acid) cage. Orthop Surg 7:266–272. https://doi.org/10.1111/os.12192
Moreland DB et al (2004) Anterior cervical discectomy and fusion with implantable titanium cage: initial impressions, patient outcomes and comparison to fusion with allograft. Spine J 4:184–191
Natarajan RN, Chen BH, An HS, Andersson GB (2000) Anterior cervical fusion: a finite element model study on motion segment stability including the effect of osteoporosis. Spine (Phila Pa 1976) 25:955–961
Panzer B, Matthew (2006) Numerical modelling of the human cervical spine in frontal impact. University of Waterloo, Waterloo
Schreiner U, Scheller G, Chen C, Schwarz M (2007) Introduction of a new intervertebral spacer for cervical fusion: results of a controlled animal study. Z Orthop Unfall 145:736–743
Slivka MA, Spenciner DB, Seim HB 3rd, Welch WC, Serhan HA, Turner AS (2006) High rate of fusion in sheep cervical spines following anterior interbody surgery with absorbable and nonabsorbable implant devices. Spine (Phila Pa 1976) 31:2772–2777. https://doi.org/10.1097/01.brs.0000245935.69927.a1
Vadapalli S, Sairyo K, Goel VK, Robon M, Biyani A, Khandha A, Ebraheim NA (2006) Biomechanical rationale for using polyetheretherketone (PEEK) spacers for lumbar interbody fusion—a finite element study. Spine 31:992–998
Wilke HJ, Kettler A, Claes LE (1997) Are sheep spines a valid biomechanical model for human spines? Spine (Phila Pa 1976) 22:2365–2374
Yamada K, Ito M, Akazawa T, Murata M, Yamamoto T, Iwasaki N (2015) A preclinical large animal study on a novel intervertebral fusion cage covered with high porosity titanium sheets with a triple pore structure used for spinal fusion. Eur Spine J 24:2530–2537. https://doi.org/10.1007/s00586-015-4047-2
Zhang QH, Teo EC, Ng HW, Lee VS (2006) Finite element analysis of moment-rotation relationships for human cervical spine. J Biomech 39:189–193. https://doi.org/10.1016/j.jbiomech.2004.10.029
Acknowledgements
The work was supported by the Program of the National Natural Science Foundation of China [51675411], the National Key R&D Program of China [2018YFB1107000], the Key Program of international cooperation in Shaanxi Province [2017KW-ZD-02] and the Fundamental Research Funds for the Central Universities.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, L., Wang, Y., Shi, L. et al. Can the sheep model fully represent the human model for the functional evaluation of cervical interbody fusion cages?. Biomech Model Mechanobiol 18, 607–616 (2019). https://doi.org/10.1007/s10237-018-1104-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10237-018-1104-x