
Abstract
Transfer functions with a high translational gain can increase the range of walking in virtual reality. These functions determine how much virtual movements are amplified compared to the corresponding physical movements. However, it is unclear how the design of these functions influences the user’s gait and experience when walking with high gain values. In a mixed-methods study with 20 users, we find that their best transfer functions are nonlinear and asymmetrical for starting and stopping. We use an optimization approach to determine individually optimized functions that are significantly better than a common approach of using a constant gain. Based on interviews, we also discuss what qualities of walking matter to users and how these vary across different functions. Our work shows that it is possible to create high-gain walking techniques that offer dramatically increased range of motion and speed but still feel like normal walking.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction

In this work, we explore the design of transfer functions that use separate acceleration curves for starting to walk and stopping to walk. By applying a translational gain, we can map a typically small VR play space (top left) to a much larger virtual space (bottom left). For example, on the right, we map the physical position (x-axis) to the virtual position (y-axis) with a gain of 10. “Quick Stop” slowly increases the virtual velocity in the beginning but slows down rapidly when reaching the target. In contrast, the “Quick Start” configuration offers slight acceleration initially but uses a prolonged stop. Of course, other (asymmetric) configurations are also possible, such as one using a slow start and a slower stop
Walking is a good way to travel in Virtual Reality (VR) (Langbehn et al. 2018). For example, it is more enjoyable, less sickness-inducing, and offers better task performance and spatial updating than teleportation or joystick control (Langbehn et al. 2018; Peck et al. 2011; Nabiyouni et al. 2015; Interrante et al. 2007; Williams et al. 2006; Riecke et al. 2010; Ruddle and Lessels 2009; Zanbaka et al. 2004; Usoh et al. 1999). However, VR systems, by default, translate the user’s physical movements to the virtual environment isometrically (i.e., one physical meter equals one virtual meter). Therefore, a user can walk only as far in VR as the physical space permits. A key challenge of walking in VR is overcoming the limited range of travel while maintaining the benefits of physical walking.
One way to extend the range of travel for walking in Virtual Reality is to apply a gain to the virtual movement, resulting in non-isometric walking. The gain value increases the virtual movement compared to the corresponding physical movement, allowing the user to travel faster and farther virtually. For example, walking a physical distance of 25 meters can be scaled to virtually walking a distance of 250 meters by applying a translational gain of 10. A transfer function describes the relationship between the physical and virtual movement (Nabiyouni and Bowman 2016). The transfer function controls how the gain value is applied based on input from the tracked physical movement, and thus produces a non-isometric virtual movement.
The most common and straightforward transfer functions use a 1:N mapping so that the virtual displacement is always a constant factor N greater than the physical displacement (e.g., Williams et al. 2006; Tirado et al. 2019; Wilson et al. 2018). More advanced transfer functions instead use a nonlinear or piece-wise mapping to scale the gain value dynamically, based on the user’s velocity, for example. With a nonlinear transfer function, users gradually accelerate to their maximum virtual speed and avoid jarring motion effects for small head movements. This approach has been shown to increase the usability and limit VR sickness effects of transfer functions with a high gain (Williams-Sanders et al. 2019; Interrante et al. 2007). However, the design space for transfer functions is extensive, and no guidelines exist on how to design these functions.
For relatively low gain valuesFootnote 1 of less than three, a 1:N mapping, resulting in a constant gain, can be used without affecting spatial orienting performance, user experience, or VR sickness too much (Williams 2008; Wilson et al. 2018; Steinicke et al. 2010; Williams-Sanders et al. 2019). Even lower gain values are often used in redirected walking techniques to make the manipulation of the virtual movement imperceptible (Steinicke et al. 2010). However, for larger gain values, the sudden acceleration (when starting to walk), deceleration (when stopping), and high virtual speed become problematic. For example, small head movements become distracting (Williams et al. 2006), gait and performance are significantly reduced (Abtahi et al. 2019; Wilson et al. 2018), and many users are affected by VR sickness (Tirado et al. 2019). Nonlinear transfer functions can alleviate some of these issues but may also induce a “sensation of lag,” and it is still difficult to be accurate at high-gain values (Abtahi et al. 2019; Interrante et al. 2007). Furthermore, current transfer functions apply the same curve to both the moments of acceleration and deceleration, overlooking different requirements a user may have for starting swiftly and stopping accurately. Little work exists on the shape of the transfer function curve and how different configurations may align with different user preferences.
In this work, we explore the design and use of transfer functions that individually control the curves for acceleration (starting) and deceleration (stopping) in high-gain VR walking to improve performance and user experience. By specifying a mapping between a fixed physical and virtual distance, we can vary these curves separately in a controlled manner. We describe our approach for varying the acceleration and deceleration using only two parameters of the transfer function’s curve. In the first part of a user study, a Bayesian optimization approach samples the different transfer functions to predict the best configuration based on walking performance and usability scores. In the second part, we interview the participants to study qualities of walking that matter to users and how these may vary across configurations. Our results show that users prefer asymmetric transfer functions and that their best configurations significantly outperform configurations using a constant gain. We find that a good transfer function “feels like normal walking, but fast” - as one of our participants put it - even for a high-gain value of 10.
2 Related work
2.1 Nonlinear transfer functions
The most straightforward approach to using non-isometric walking is to apply a constant gain (i.e., a transfer function with a constant 1:N mapping) to all directions of movement. The gain increases forward motion but also lateral and vertical motion. When walking, the head is also swaying side-to-side and bobbing up and down. Even simply turning the head when standing still results in some lateral motion, which would be greatly exaggerated when using high-gain values. This makes it difficult to control small, local movements and can result in disturbing motion while walking (Wilson et al. 2018; Williams et al. 2006; Williams-Sanders et al. 2019; Abtahi et al. 2019; Tirado et al. 2019). Williams et al. investigated the effect of non-isometric walking with constant gains of 1.0, 2.0, and 10 on spatial orientation and concluded that it is a viable locomotion method (Williams et al. 2006). However, they noted that small head movements become distracting at a gain of 10. Wilson et al. (2018) used a constant gain and relatively low gain values (1–3) to investigate its effect on interaction performance: they concluded that a constant gain of 2 is still usable, but accuracy, simulator sickness, and frustration become problematic above that. Abtahi et al. (2019) also found that walking with high constant gain values (up to 30) diminishes positional accuracy and causes users to modify their gait due to lack of control.
Gradually increasing the gain values with the user’s velocity avoids the problem of a high-gain scaling small head movements (Interrante et al. 2007; Williams-Sanders et al. 2019). In “Seven League Boots,” one of the first studies using non-isometric walking, Interrante et al. (2007) did this by linearly scaling the gain value by the walking velocity: When the velocity is low, the gain value is also low. This approach minimizes the disturbing effects when maneuvering or moving slowly. In a pilot study, the authors reported that the Seven League Boots technique, using a maximum gain of 7, was strongly preferred over flying with a joystick, natural walking, or using a constant gain. They further described that enabling the technique via a button press may allow for a greater feeling of control while having it always on “may induce a sensation of lag in the system” (Interrante et al. 2007).
Williams-Sanders et al. (2019) investigated three nonlinear transfer functions: quadratic, cubic, and exponential. Their piece-wise transfer function increases the gain nonlinearly as the user’s velocity increases, up to a certain threshold velocity, after which it applies a constant gain. They also investigated the position of this threshold and found that users prefer a threshold of 0.5 m/s over 0 m/s (effectively constant gain) and 1.0 m/s (similar to Interrante et al.’s approach (Interrante et al. 2007)). The authors gathered user ratings of “local control,” “global control,” “sickness,” and “feeling unbalanced” for the three functions, but it is unclear how these relate to user experience or walking performance. Their main experiment used a large, open outdoor environment, and their results show that users can maintain good spatial orientation for gain values of up to 50.
A shared characteristic of the velocity-controlled transfer functions above is that the curve for increasing velocity (starting to walk) and decreasing velocity (stopping to walk) is identical. However, Abtahi et al. (2019) reported that users found the Seven League Boots technique rather tricky to use and often required multiple smaller steps to stop on the target. Seven League Boots, unlike the other two methods in their study, diminishes positional accuracy at high gains, and users modify their walking behavior to compensate for their lack of control. The Seven League Boots technique became particularly difficult to use at a gain of 30.0: Some participants said that they “would step too far or not enough and lose track of where it was, and would keep trying to correct and adjust to get on the right spot”, or that it felt “disorienting and difficult to be accurate” (Abtahi et al. 2019). So, it seems that transfer functions should be improved to better support stopping when walking with high gain.
Previous work suggests that nonlinear transfer functions are a promising solution to prevent scaling small movements and disturbing motion when using a high gain. However, the effect of different transfer functions on the quality of walking remains unclear, particularly for different task requirements: For example, when the goal is to start moving quickly or to stop comfortably and accurately. We address this issue by changing the curve of the transfer function separately for the beginning and end of the trajectory with asymmetric transfer functions. This approach allows us to evaluate a broad range of transfer functions and determine how fast the transfer function should accelerate people when they start to walk and how fast it should decelerate them when they want to stop.
2.2 Effects of non-isometric walking on user experience and performance
People readily adjust their locomotor control to changing circumstances (Mohler et al. 2007b). Some work has shown that people re-calibrate their gait in the presence of unnatural optical flow, but not their walking velocity (Rieser et al. 1995; Mohler et al. 2007b). However, previous work using virtual reality (VR) has shown that gait - including walking velocity - is significantly degraded compared to walking out of VR (Mohler et al. 2007a; Janeh et al. 2017, 2019). This effect is still worse for non-isometric walking (Janeh et al. 2017; Abtahi et al. 2019; Tirado et al. 2019) and it seems that translational gain, perceptible or not, affects walking velocity (Nguyen et al. 2017; Janeh et al. 2017; Abtahi et al. 2019). Janeh et al. (2019) also showed that degraded gait effects persist with a longer duration of isometric walking in VR. Users walk more slowly with increased step frequency and decreased step length during non-isometric walking, and these effects may become more substantial for higher gain values (Janeh et al. 2017; Tirado et al. 2019; Abtahi et al. 2019). However, it remains unclear how different acceleration curves and gain values influence gait.
Several different aspects of the subjective experience of non-isometric walking have been investigated. For example, Interrante et al. (2007) asked users to rate the Seven League Boots technique on the items “easy to use”, “feels natural”, and “induces cybersickness.” Tirado et al. (2019) reported that walking with a constant gain function and high gain can induce significant simulator sickness, but only in some users.
Abtahi et al. (2019) investigated a more extensive set of qualities by combining a custom questionnaire with parts of a Standard Embodiment Questionnaire (SEQ) and a workload questionnaire (NASA TLX). They performed a principal component analysis and found two factor loadings of “Preference” and “Embodiment”. The first contained the preference questions (e.g., “I liked walking around in this mode”) and the workload questions. The second factor contained the embodiment and physical demand questions. These results offer valuable insight into what the qualities of walking are. The authors recommend investigating dynamic gain changes next but warn that in a preliminary study, they found that dynamic changes can cause simulator sickness symptoms. However, “gradual and slight gain changes may be possible without inducing motion sickness or a sensation of lag” (Abtahi et al. 2019).
Previous work shows that transfer functions influence both pragmatic (e.g., gait, accuracy) and hedonic (e.g., simulator sickness) qualities of walking in VR. However, VR locomotion research usually compares non-isometric walking against alternative locomotion techniques instead of comparing different transfer functions. Furthermore, more work is needed to understand how non-isometric walking influences the user experience, particularly in terms of subjective qualities of walking with a high gain. We address this issue by measuring the effects of transfer functions on gait and usability and explore what subjective qualities of walking matter to users.
3 Designing transfer functions
Walking from a standstill to a target and stopping comprises three phases: gait initiation (accelerating), steady-state walking, and gait termination (decelerating and stopping). Since starting and stopping to walk have different requirements and gait behavior, we can apply a unique transfer function to either phase to create optimal behavior for both. Combining the two different behaviors into a single function results in an asymmetric transfer function. In this section, we (1) detail a design process for transfer functions for walking in virtual reality (VR) and (2) discuss how to best vary the gain for acceleration and deceleration independently. In the next section, we use this to (3) systematically generate different transfer functions, (4) experimentally determine the optimal transfer function, and (5) evaluate their effect on the quality of walking.
3.1 Position-controlled transfer functions

An example transfer function defined by two control points \(c_1=(0.1, 0.05)\) and \(c_2=(0.8, 0.90)\). The current configuration results in an asymmetric transfer function where the stopping moment is longer than the starting moment. With the current gain of \(G=10.0\) and a physical distance of 5 meters, the starting moment is 0.5 meters long, and the stopping moment 1 meter. The red dashed lines indicate the respective isometric (\(G=1.0\)) boundaries. The dashed grey lines indicate the possible positions of the control points, respectively.
A typical transfer function for non-isometric walking takes a physical displacement or position value as input and multiplies this by the gain value to create a virtual displacement or position greater than the physical one (for gain values >1.0). In a velocity-controlled transfer function, the gain is scaled (non-)linearly based on the user’s physical walking velocity. In this work, we use position-controlled transfer functions with a defined trajectory between beginning and end points (see Fig. 1). We assume a standstill-to-standstill travel task where the virtual target location is known, and the user can walk to the target in a relatively straight line. This assumption allows us to ignore the special cases of turning and reducing velocity during the trajectory, which we leave for future work. The transfer function then scales each physical point along the trajectory by the gain value to produce a farther virtual point. By varying the gain value along the physical points, the transfer function produces a nonlinear movement along the virtual trajectory. The conceptual idea is exemplified in Fig. 2.
In Fig. 2 the virtual and physical trajectories are normalized so that \(x = 0.0\) corresponds to the physical starting position and \(x = 1.0\) corresponds to the physical target position. The transfer function is a Cubic Hermite Spline defined by four control points: one at the origin (0, 0), one at the target position (1, 1), and two variable points \(c_1\) and \(c_2\). Each control point is a tuple (x, y, t) for the x-position, y-position, and tangent. \(c_{1,2}\) control points mark the end of the “acceleration phase” and the beginning of the “deceleration phase”, respectively. In the steady-state walking phase, we apply a constant gain. The configuration of the transfer function can then be changed by changing the positions of \(c_{1,2}\) control points and adjusting the tangents to produce a smooth curve.
The ratio between the virtual and physical motion is typically referred to as gain, although it lacks a common definition. Previous work has referred to translational gain as “optical gains”, simply “gain”, or “scaled movements”. In this work, we produce a non-isometric virtual position \(\vec {p^*}\) by multiplying the physical position \(\vec {p} = (p_x, p_y, p_z)\) by a scalar gain value g (Eq. 1).
To reduce disturbing motion, transfer functions often only scale the movement in the horizontal plane (\(g \cdot p_x, p_y, g \cdot p_z\)) or - although this can be difficult to determine - the direction of travel (\(p_x, p_y, g_z \cdot p_z\)).
The slope of the transfer function curve corresponds to the effective gain at a given time during the trajectory. The effective gain refers to the ratio between the user’s perceived (virtual) motion and their physical motion. So, changing the distance over which the nonlinear curves are applied varies the intensity of the acceleration and deceleration.
In the steady-state walking phase the effective gain can be higher than the average gain. This way, the virtual trajectory with the asymmetric function is the same distance as with a constant gain function. Based on our experiences and anecdotal reports (e.g., Williams-Sanders et al. 2019), users seem to have little trouble with high, constant gain values during steady-state walking, and so we consider this a safe simplification of our design.
3.2 Transfer function parameters
The coordinates and tangents of \(c_1\) and \(c_2\) control points dictate the resulting virtual movement from the transfer function. However, many possible configurations do not produce a useful transfer function. We have identified several guidelines for configuring the control points through our testing. The resulting constrained design space will likely produce useful and desirable transfer functions.
3.2.1 Control point coordinates
The solid black line in Fig. 2 indicates the constant gain transfer function over the same distance. The y-coordinate of \(c_1\) should not lie on or above this line. Vice-versa, the y-coordinate of \(c_2\) should not lie on or below this line. If a control point does lie on this line, there is effectively no nonlinear scaling of the gain value. If \(c_1\) lies above the line, the curve would be downward concave around \(c_1\), causing the user to accelerate at a high rate when starting to move to slow down during steady-state walking to reach a constant gain again. Vice-versa, \(c_2\) being below the black line leads to a concave upward curve around \(c_2\) which would cause the user to accelerate towards the target at a high rate instead of slowing down.
Similar bounds are given by the red-dashed lines in Fig. 2 that indicate the isometric mapping (i.e., \(g=1.0\)). If the curve falls below the lower red line or above the upper red line, the user slows down at that point to less than their physical walking velocity (\(g<1.0\)). This behavior is undesirable and can be avoided by bounding the y-coordinate of \(c_1\) and \(c_2\) to be between the constant gain and isometric lines and adjusting the tangents to keep the curve within those same bounds (see Sect. 3.2.2).
The control point’s y-coordinate can be closer to the black line to create a faster acceleration or closer to the red line to create a slower acceleration. For simplicity, we constrain the control points to lie on the grey-dashed lines in Fig. 2 that equally separate the solid black and red-dashed lines. This guideline has produced good results in our testing.
The acceleration while starting and stopping to walk can now be controlled by only varying the x-coordinate of \(c_1\) and \(c_2\) respectively. We dub this x-coordinate \(\alpha\) (alpha), resulting in two free parameters \(\alpha _{start}\) and \(\alpha _{stop}\), respectively.
3.2.2 Control point tangents
In order to provide a smooth virtual movement, the nonlinear curves of the transfer function before \(c_1\) and after \(c_2\) should also be within the red and black guidelines in Fig. 2. We set the tangent of the control points to be the slope of the line between \(c_1\) and \(c_2\). This tangent ensures a smooth transition between the nonlinear and linear sections. We set the tangent of the origin and target control points to the slope of the isometric line (\(\frac{1}{G}\)) to prevent the curve from falling below the isometric gain line. If \(c_1\) or \(c_2\) are very close to the origin or target, the cubic spline may cause the curve to fall outside the isometric line regardless. In this case, we find the closest tangent value for the control point that keeps the curve inside the isometric line.
4 Study
The purpose of this work is to take the first steps towards designing asymmetric and dynamic transfer functions that improve the user’s experience and performance when walking with a high gain.
The design space of our transfer functions consists of three variables that we can modify for a given distance: the average gain value g, the distance over which the user is accelerated from the starting point, and the distance over which the user is decelerated toward the target (controlled by \(\alpha _{start}\) and \(\alpha _{stop},\) respectively). However, this still leaves an extensive range of possible configurations; we do not know the effect of longer or shorter acceleration distances on user experience and walking performance.
We believe an optimization approach is necessary because it would be infeasible to test all possible values of \(\alpha\), and it is unclear which points are most interesting to sample. We chose Bayesian Optimization because of its good performance with a small number of noisy samples, its ability to interpolate over unseen points, and its ability to provide a measure of the variance of the predicted score at any point. In this user study, we leverage Bayesian Optimization to predict optimal transfer functions efficiently and evaluate their effect on user experience.
4.1 Design
The study consists of two parts. In the first one, we optimize \(\alpha _{start}\) and \(\alpha _{stop}\), and in the second, we perform a semi-structured interview with the participants about the qualities of walking. We optimize \(\alpha\) individually in a start and stop condition, respectively. Each of these conditions consists of 10 trials. Each trial uses a unique transfer function generated by the optimization method below. We aim to control the exposure to virtual walking across participants, so a fixed number of trials is preferred, even though finding the participant’s optimal configuration after ten trials is not guaranteed. Figure 4 shows the procedure and study design in more detail. Half of the participants starts with the start condition and the other half starts with the stop condition.
Our primary dependent variables are the user experience and performance of the transfer functions. A typical travel task has several requirements, such as accuracy, speed, comfort, and ease of use of the technique, which we expect to be influenced by the transfer function design. In other words, a poor design will lead to a worse user experience and performance on the travel task compared to an optimal design. Since users control their walking through complex internal control models that we cannot directly access or evaluate, we use the user’s subjective experience to measure the quality of walking. We combine this with an objective measure of the quality of walking by recording the gait parameters of the user.
As measures of user experience, we mainly record the perceived usability, VR Sickness, and qualities of walking through the interview. For VR Sickness, we use the Simulator Sickness Questionnaire (Kennedy et al. 1993) which we record after each condition. For measuring perceived usability, we use the UMUX-Lite questionnaire (Lewis et al. 2013), which asks participants about the ease of use and competence of a system. UMUX-Lite is both a recognized metric and contains only two items, so it is helpful for quickly evaluating the usability of single trials in the optimization process. We changed the word “system” in each question to “configuration” to clarify what the questions refer to (i.e., the different configurations of transfer functions, not the complete VR system). The UMUX-Lite score range is [0, 100], where 100 indicates the highest perceived usability.
As an objective measure of performance, we choose the time-to-target in seconds. The time-to-target directly relates to the user’s average walking velocity due to the fixed distance in the task. Previous work has shown that walking with a gain degrades several gait parameters (e.g., walking velocity, step size, step count) (Janeh et al. 2017; Tirado et al. 2019; Nguyen et al. 2017), and that this degradation may be worse for stronger manipulation (Janeh et al. 2017). We expect to see variations in walking velocity based on the participants’ comfort (e.g., walking more slowly) and how well they can control their virtual movement (e.g., faster for more “fun,” slower for higher accuracy). The time-to-target is taken as the mean over the last six traversals and normalized to the range [10.0, 4.0] seconds, where lower time produces a higher score. This range is based on a pilot study with four participants walking five meters in VR plus one second on each end.
The walking velocity measure does not consider a user’s preferred walking velocity, but determining this is difficult, especially in VR, due to novelty effects, task requirements, and degraded gait compared to real walking (Janeh et al. 2017). However, since we optimize the transfer function configuration on a per-user basis, we can evaluate the within-user differences as effects of the transfer function.
4.1.1 Optimization
The optimal configuration of a transfer function should maximize the transfer function’s usability and the participant’s walking velocity. So, we formulate a fitness function f(u, t) that is an equally weighted combination of the usability score u and the time-to-target in seconds t for each trial (Eq. 2).
We use Meta’s Adaptive Experimentation Platform (Ax) (Meta Platforms Inc 2022) as our Bayesian Optimization Framework. Specifically, we use a Gaussian Process model and Expected Improvement optimizer (GP+EI) provided by the Ax software.
For a new trial with a condition (start or stop) we query the EI algorithm to propose a new \(\alpha\) value to evaluate. We optimize this this condition to find the optimal value of \(\alpha\), while keeping the other \(\alpha\) fixed to \(\alpha _{start}=0.2\) or \(\alpha _{stop}=0.8\), respectively.
We bound the optimisation of the start control point to \(\alpha _{start} \in (0.0, 0.4]\), and the stop control point to \(\alpha _{stop} \in [0.6, 1.0)\). The first four trials in each condition use four fixed points (see Fig. 4) in randomized order to provide a prior to the model. For these initial trials, we use a higher uncertainty measure (SEM=0.055) to model the greater noise inherent to the user getting used to the evaluation scales and the fast walking. We use a lower uncertainty measure for the final six trials in each condition (SEM=0.035). In a pilot study, these values performed well and prevented the model from weighing noisy initial evaluations too heavily.
For each condition, we (1) evaluate the first four trials, (2) use the optimization algorithm to propose the next \(\alpha\) to evaluate based on the Expected Improvement, (3) evaluate the fitness of \(\alpha\) using the participant, (4) update the model with the new data point, and (5) predict a distribution of fitness scores over all \(\alpha\) values.
4.1.2 Task
The participant’s task is to walk to and stop on a virtual target in a straight hallway using the selected transfer function, marking one traversal. Each trial uses one particular transfer function and consists of six traversals. We use ten traversals per trial to allow the user to adapt to the new transfer function to some degree. We found that the combination of six traversals by ten trials by two conditions is a good combination within a reasonable time frame (approximately 60 minutes for this experiment).
The target distance is five meters in a straight line from the origin (see Sect. 4.1.3). A physical distance of five meters allows the users enough time to use normal gait initiation to accelerate to steady-state walking, walk at least another meter, and then stop with normal gait termination. It is a realistic distance for many large homes and labs and is feasible in our lab space with additional safety margins. A distance of two meters, for example, would already be challenging as the user will have covered most of the trajectory after just three steps.
We set the average gain to \(g=10\) throughout the experiment so that only \(\alpha\) influences the gain experienced by the participant. This high gain value has been used in previous work (Abtahi et al. 2019; Williams-Sanders et al. 2019; Tirado et al. 2019) and produces noticeable acceleration and velocity effects to the participant.
The participant is instructed to walk at their preferred normal walking speed and to make a complete stop with both feet on the target. When a traversal begins, a traffic light appears on the right wall near the start mark on the floor, two meters in front of the user. When the user presses a trigger button, the light turns green after one second. The participant should hold the button and release it only when they feel they have made a complete stop on the target. The trigger and the traffic light ensure that no transfer function is applied before the participant is ready for the next traversal.
When the participant reaches the target, the target mark transforms into the start mark, and a prominent arrow symbol indicates the user to turn around (counter-)clockwise. The direction of the arrow is random for each participant. The resultant “figure-8” pattern keeps the participant within the physical space. Sound effects also indicate the beginning and end of the traversals.
4.1.3 Environment
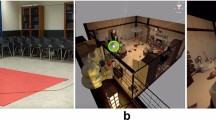
The environment is a long, straight hallway, similar in appearance to those in hotels or ferries. Figure 3 shows the environment with additional detail. The transfer function only applies a gain to the forward direction (z-axis) between the start mark and the target mark. Outside of a trial or the marks, no gain is applied, and the participants walk isometrically (\(g=1\)). The hallway allows us to apply the gain only to this direction without the need for detecting the participant’s walking direction, as it naturally constrains the walking direction with walls.
A red box covering the floor, walls, and ceiling indicates the target location. The virtual target is located at 50 virtual meters from the start mark, given the average gain of \(g=10\) and the physical distance of 5 meters. The target box is 30 centimeters (approx. 1 foot) deep (z-axis). The start mark is identical to the target mark, except for having a pink color, and indicates where the participant should stand to start.

The hallway that was used in the experiment. Figure 3a shows the view from the start mark. The red box covering the floor, walls, and ceiling marks the target location and is 30cm (approx. 1ft) deep (Fig. 3b). The hallway is 2m wide and infinitely long in both directions. Doors are placed opposingly on each wall every 4m and 6m. Lamps are placed on the ceiling every 5m. The walls and ceiling are white with a light texture, and the floor is a blue carpet texture. The UMUX-Lite questionnaire that appears after each trial is shown in Fig. 3c
4.1.4 Interview
Our initial tests suggested that users have some feeling about whether a particular configuration feels “right” or “a bit off”. We want to explore these experiences further by collecting qualitative data on what aspects of (non-isometric) walking matter to users and how these experiences can change for different transfer functions. To do this, we perform a 15–20-minute semi-structured interview after the optimization. We use the following questions to structure the interview:
-
“What did you think of the experiment/fast walking (as a whole)?”
-
“Did you notice any changes in either condition and if so, what?”
-
“How did you feel about the changes? Why do you prefer one configuration over another?”
-
“How did you interpret and score the questions on the UMUX-Lite questionnaire?”
-
“What phase was more important to the participant, starting or stopping, and why?”
-
Try out their predicted best configuration.
During the interview, we asked 10 participants to try out their predicted best transfer function after the optimization part. Due to a technical error, this was not possible for the first 10 participants. We asked the participants to comment out loud on their experience while using their best transfer function.
4.2 Participants
We recruited 20 participants from an internal mailing list, word-of-mouth advertisement, and Facebook posts in university, student, and ex-pat groups for the greater Copenhagen area. We removed one participant from data analysis due to a software error causing incomplete data, so we recruited another who was assigned the same settings. Because the experiment and the interview were unaffected for this participant, we kept their interview data, resulting in 21 interview data sets.
We record the following demographics: Age, Height, Gender, Inter-Pupilary Distance (IPD), and Motion Sickness Susceptibility. We measured the IPD by using a ruler on the participant’s nose and approximating the distance between the pupils while the participant kept their eyes stationary and directed at the experimenter. The participants filled out their height when they signed up. If they did not know or were unsure we measured it while they stood up straight against a wall. We used Golding’s revised Motion Sickness Susceptibility Questionnaire (MSSQ) and the provided instructions for scoring (Golding 1998).
The participants were eleven (ten after removing the one) males and ten females. Fourteen participants were 20–30 years old, five were 30–40, one was 40–50, and one was 50–60. The mean MSSQ percentile for nineteen participants was \(31.9\pm 13.4\), but two participants had a 92th and 99th percentile score. IPD was \(60.2 \pm 3.6\) millimeters. In terms of experience with VR: four participants reported never having used VR before, while four had used VR 1 or 2 times in total, four participants use VR once every half a year or less, one participant uses VR once every month or less, four once a week or less, and one multiple times a week. Thirteen participants had normal vision without glasses or contacts; eight had corrected vision. The mean female height was \(166.3\pm 8.4\) centimeters, and the mean male height was \(184.3\pm 6.2\) centimeters.
4.3 Materials

A flow chart of the procedure and conditions. Each square represents one traversal where the user performs the task by walking 5 meters and turning around. Two practice rounds are used to practice the task and high-gain walking respectively. After each optimization condition (dashed lines) we record the SSQ and take a short break. The \(\alpha\)-value initially comes from a fixed set, and then from the Expected Improvement (EI) prediction based on the Gaussian Process (GP) model of the current space (S) of evaluated pairs
We used an Oculus Quest 2 Virtual Reality HMD device to present the virtual environment and track the user. The application and headset were set to a rate of 72FPS/72Hz. The Quest 2 headset was running software version v29.
The physical play area of the Quest 2 was set to 2m by 5m plus 1 meter on all sides for running the study. The Guardian boundary settings were set to minimal sensitivity so the Guardian would not pop up unless the participant went outside the normal play area. The participants used only the primary trigger and “A” buttons on the right-hand controller to provide input, but they held the left-hand controller as well. We adjusted the IPD of the headset to the corresponding setting according to the Meta Quest Support recommendations (Meta Quest Support 2022).
We use Meta’s Ax Adaptive Experimentation Platform (Meta Platforms Inc 2022) v0.1.20 in Python 3.8.10 for the optimization. The optimization software was running on a separate server. We used a simple JavaScript web page for the experimenter to start the experimental conditions, controlled by a local configuration file. The web page sends instructions to the server application running the Ax software while the client on the VR headset polls the server for a new task and executes the new task (e.g., a trial with particular settings). Communication took place on a local network through REST API calls.
For the study application and its environment, we used Unity 2019.4.13f1 with the legacy VR SDK systemFootnote 2 and Oculus Android 2.38.6. The transfer function was implemented in Unity using their AnimationCurve system that uses Cubic Hermite Splines. The transfer functions were replicated in Python using suggestions on the Unity Forums (Unity Technologies 2013). Our source code is open-source and available upon request.
The demographics and VR sickness questionnaires were implemented online in Microsoft Forms and administered using a laptop during the experiment.
4.4 Procedure

The predicted best \(\alpha\) values for each participant. K-Means (n = 4) clustering groups the predictions together and we plot the clusters here using 4 different colors. Colors indicate faster (blue) to slower (yellow) acceleration clusters
The study starts with obtaining consent, gathering the demographic data, and assigning a random ID. We then fit the headset and adjust the IPD as needed. If the participant is wearing glasses, we use the glasses bracket provided with the Quest 2. After the participant has studied the task, a practice round begins. A paper overview and instructions, including the full 7-point scale and labels, inform the participants about the UMUX-Lite questionnaire.
Figure 4 details the procedure and settings for the practice rounds and optimization trials. At the end of each trial, the UMUX-Lite questionnaire appears in VR (Fig. 3c). When the UMUX-Lite answers have been submitted, the subsequent trial with a new transfer function assigned by the optimization algorithm automatically begins. When the condition is finished, we take the participant out of VR and give them the SSQ to fill out. After a short break, we position the participant again on the start location with the headset properly fitted and start the final condition. Finally, we take the participant out of VR and invite them to sit down and inform them that the next part will be audio recorded. We proceed with the semi-structured interview for a maximum of 20 minutes. After about five minutes, or when the topic presents itself, we ask the user to once more put on the headset and complete six traversals with their predicted optimal configuration. During this trial, we asked the participant to comment on how they felt and what they would change about the configuration.
The total experiment duration is approximately 60–70 minutes. The VR exposure duration is two conditions of continuous exposure with a mean duration of \(11.1 \pm 1.28\) minutes per condition. The participant received a mix of beverages and candy valued at approximately $20 as a reward.
5 Results
After the optimization phase, the Gaussian process models predict a fitness score over \(\alpha _{start}\) and \(\alpha _{stop}\). In this section, we first present the predicted best parameters of the transfer function for each participant. We then present how different transfer functions affect usability, walking velocity, and VR sickness. Finally, we identify and present six qualities of walking from the interview.

This figure shows the difference between the predicted best \(\alpha _{start}\) and \(\alpha _{stop}\) values. For increased readability the \(\alpha\) values are converted to their respective distances from the start and stop points given the physical distance of five meters. A larger relative difference (\(\Delta \alpha\), dark-blue) indicates a greater asymmetry between the starting acceleration distance and the stopping deceleration distance. The light blue bar spans the starting point \(\alpha _{start}\) to the stopping point \(\alpha _{stop}\)
5.1 The best transfer functions

The usability score from the UMUX-Lite questionnaire. Error bars are bootstrapped 95% confidence intervals using BCa. *** indicates a significant difference with \(p<0.001\). “Constant” comprises \(\alpha _{start}\le 0.1, \alpha _{stop}\ge 0.9\) functions that result in acceleration similar to constant gain. “Best” comprises the predicted best functions for all users. “Other” comprises the remaining functions
The per-participant models suggest that users have diverse preferences for starting and stopping acceleration. To visualize the predicted best transfer function parameters, we perform k-Means clustering on the best \(\alpha\) values for each condition and show the color-coded results in Fig. 5. In the start condition the cluster means appear evenly spaced, but the majority of values center around \(\alpha _{start} \approx 0.14\). In the stop condition there appears to be a slight majority around \(\alpha _{stop} \approx 0.75\). Additional data, including the Gaussian Process regression models for each participant, can be found in the supplementary material.
Figure 6 shows the best parameters of each participant’s transfer function in more detail: the figure shows the best acceleration distances for starting and stopping and illustrates the relative asymmetry between \(\alpha _{start}\) and \(\alpha _{stop}\). Recall that lower \(\alpha _{start}\) values indicate a faster starting acceleration, while higher \(\alpha _{stop}\) values indicate a faster stopping deceleration. Given the fixed task distance of five meters, we can directly convert \(\alpha\) to the distance in meters: \(\alpha = 0.1\) is a distance of 0.5 meters.
Here is an example of how to read the chart: consider Kasey, the 5th participant from the bottom in Fig. 6. Their starting acceleration curve ends at approximately 0.5 meters from the starting position, and their deceleration curve begins 1.75 meters before the target. In other words: Kasey’s gain increases over 0.5 meters but decreases over 1.75 meters, resulting in a difference of 1.25 meters in the (\(\Delta \alpha\)) bar. Kasey prefers a slow stop, in contrast to Kane. We can see that 14 of the 20 participants prefer a configuration with a longer deceleration than acceleration distance, resulting in an asymmetric transfer function. The first six participants have a (nearly) symmetric function, and coincidentally those participants also prefer the slowest accelerations.
The width of the dark blue bars (\(\Delta \alpha\)) indicates the difference between \(\alpha _{start}\) and \(\alpha _{stop}\); greater differences indicate that the start and stop curves are more asymmetrical than smaller differences. \(\Delta \alpha\) bar leans proportionally left or right to indicate the relative asymmetry. For example, the bar being three times longer on the right-hand side than the left-hand side means that the user prefers a deceleration distance three times longer than their acceleration distance. The ends of each light-blue bar indicate the predicted best \(\alpha _{start}\) and \(\alpha _{stop}\) values for that user. Values closer to the center on the x-axis indicate a faster acceleration for either condition: wider bars have longer acceleration distances.
5.2 Usability

The average walking velocity per group, condition. Error bars indicate the bootstrapped 95% confidence interval using BCa. The average walking velocity is simply the time-to-target divided by the physical distance (5m). Lower velocity could indicate an effect of transfer function configuration on gait, but no significant differences were found. “Constant” comprises \(\alpha _{start}\le 0.1, \alpha _{stop}\ge 0.9\) functions that result in acceleration similar to constant gain. “Best” comprises the predicted best functions for all users. “Other” comprises the remaining functions
Figure 7 shows the perceived usability of three groups of transfer function configurations: “Constant”, “Other”, and “Best”. The “Constant” group contains the transfer functions with \(\alpha _{start} \le 0.1\) or \(\alpha _{stop} \ge 0.9\) (\(\approx 0.5\)m). Such low/high \(\alpha\) values result in a near-immediate acceleration similar to the use of a constant gain transfer function. The “Best” group contains the predicted best configurations, and the “Other” group contains the other evaluated transfer functions. The perceived usability score from the UMUX-Lite questionnaire was the first component of our fitness function, as we expected effective, pleasant, and easy-to-use transfer functions to result in a better assessment of usability.
The usability scores are not normally distributed, and so we perform a Friedman test on the groups, separately for the start and stop conditions. We find an effect of group on usability for the start condition (\(F(1.9, 36.1)=12.2, p<0.001\)) and a strong effect for the stop condition (\(F(1.9, 36.1)=85.1, p<0.001\)). Post-hoc tests using Wilcoxon tests with Bonferroni correction show large effects between Best and Constant (\(p<0.001\); Hedges’ \(g=1.16\)) and Best and Other (\(p<0.001\); Hedges’ \(g=0.80\)) for the start condition. For the stop condition we find a very large effects between Best and Constant (\(p<0.001\); Hedges’ \(g=2.33\)) and Constant and Other (\(p<0.001\); Hedges’ \(g=-1.73\)), and a large effect between Best and Other (\(p<0.001\); Hedges’ \(g=0.71\)).
5.3 Walking velocity
Figure 8 shows the average walking velocity of the same three groups of transfer function configurations (see subsection 5.2). The average walking velocity is the time-to-target over the distance (5m). The walking velocity in our study is relatively high for walking in VR and on par with existing data on non-VR preferred walking velocity (Multon and Olivier 2013). The time-to-target is the second component in our fitness function, as we expected disturbing or difficult transfer functions to result in users requiring more time to walk to the target.
The data were not normally distributed in either condition, so we used Friedman tests to investigate the effect of group on average velocity. For the start condition we find no significant effect (\(F(1.9,36.1)=0.11\), \(p=0.12\)), and neither for the stop condition (\(F(1.9, 36.1) = 3.16\); \(p=0.06\)).
Participants may have adapted their gait due to increased experience for each consecutive traversal with a particular configuration or increased experience with high-gain walking with each consecutive trial. The time-to-target data for traversal and trial was not normally distributed, so we performed a Friedman test to investigate the effect of traversal or trial on time-to-target. We found a marginally significant effect for Traversal on Time-to-target (\(F(4.9, 93.1) = 6.86\); \(p<0.001\)), but a post hoc Wilcoxon test with Bonferroni correction only found a small significant effect between traversal 2 and 5 (\(p<0.05\); Hedges’ \(g=0.12\)); 4 and 5 (\(p<0.001\); Hedges’ \(g=0.12\)); and 5 and 6 (\(p<0.001\); Hedges’ \(g=-0.13\)). These differences are \(\approx 0.1\) seconds on a distance of 5 meters, and thus practically irrelevant. We did not find a significant effect of Trial on Time-to-target (\(F(8.9, 169.1)=0.72\); \(p=0.69\)).
5.4 VR sickness

Simulator Sickness Scores for the start and stop conditions. Error bars indicate bootstrapped 95% confidence intervals using BCa. An SSQ score of \(> 20\) is typically considered problematic sickness, but no participants mentioned feeling sick or significantly uncomfortable after the conditions
Figure 9 shows the Simulator Sickness Questionnaire scores for both conditions. The SSQ Total Score is relatively low, which corresponds to our participants saying they felt good after each condition. However, the Dizziness sub-scale shows high scores and a large confidence interval, suggesting that at least some participants suffered from dizziness symptoms. Based on the interviews, we know that some configurations caused dizziness, nausea, and balance issues. For instance: Kane reported that they felt nauseous when trying \(\alpha _{start}=0.4\) and in some other configurations, but their symptoms disappeared quickly in the following configuration. Other participants also reported dizziness and balance issues for slow starts and sudden stops. Some users looked at the floor or walls at some point and reported that this caused VR sickness symptoms.
A Mann-Whitney U-test shows no significant difference for any SSQ score between the two conditions (all \(U>200\), \(p>0.61\)). We investigated a potential effect of gender, but a Mann-Whitney U-test showed no significant effect of gender on VR sickness (\(U=37.5\), \(p=0.23\)).
Finally, we recorded the Motion Sickness Susceptibility Questionnaire for each participant and their experience with VR systems. These scores could be a predictor of higher VR sickness responses. A Spearman test of correlation between the SSQ Total Score and MSSQ Raw score did not show a significant correlation for either the start or stop condition (\(r=0.07\), \(p=0.77\); \(r=-0.01\), \(p=0.96\), respectively). Experience was converted from “No experience” – “Multiple times a week” to a Likert-style 0–5 scale. A Spearman test of correlation did not show a significant correlation between SSQ Total Score and Experience (\(r=0.0\), \(p=0.81\); \(r=0.27\), \(p=0.24\), respectively).
5.5 Quality of walking
The semi-structured interview further explores how participants experience high-gain walking in VR and what qualities of walking are most relevant.
To analyze the interview data, we first transcribed all the participant statements from audio files into text snippets. Two authors then started organizing the text snippets into categories describing different qualities or features of walking through a 2.5-hour affinity diagramming session. One author labeled the snippets into categories on a digital sheet (some with many labels). The authors adjusted the categories during the session with edits, additions, and deletions.
We found the participants describing their experiences in terms of six qualities: Naturalness, Enjoyment, Difficulty, Comfort, Effort, and Control. We discuss our key findings here and provide a more detailed discussion in Appendix A.
5.5.1 Naturalness, enjoyment, and comfort
During the interview, participants often described their experience as “feeling natural” or “feeling like normal walking.” Rokso said that “[It] was based on a feeling of whether it felt like good walking, more natural in a way, or felt kind of off.” After trying out their predicted best configuration, another participant, Ximeno, said: “I guess I would say it just feels like normal walking.” In contrast, the participants described more negative experiences often as “unnatural,” “weird,” or “a bit off.” The moments of starting and stopping to walk were also related to creating or destroying a “natural” feeling: the sudden start was sometimes referred to as a “glitch” or “strange,” while a wrong \(\alpha _{stop}\) value would not “feel natural” due to having to compensate for the virtual movement.
Almost all participants thought walking in VR with high gain was fun and said they enjoyed it. Bellatrix was enthusiastic overall and said that “[she] definitely had fun!”. Enjoyment mostly relates to the high-gain walking as a whole and may have been influenced by novelty effects. Positive comments related to a specific configuration were mostly related to “Naturalness,” but negative comments were often about a configuration being “annoying” if it did not behave as desired. For example: very long stops (\(\alpha _{stop}\approx 0.65\)) or very short stops (\(\alpha _{stop}\approx 0.95\)) were regarded as annoying.
A large portion of participants used “comfort” to describe their experiences, both as a whole and for particular configurations. For example, Dana said: “I think comfort was my biggest requirement, right? Actually feeling that I trusted the system, but also feeling that I felt comfortable walking in the space.” Haizea related comfort to their ability to control their walking, saying: “[Whether] I felt, like, safe walking, and [that I’m] not gonna, like, fall, or trip or lose my balance.” However, particularly the short start and stop configurations (\(\alpha _{start}<0.05\) and \(\alpha _{stop}>0.95\)) could be uncomfortable. For Kasey, the high starting acceleration was “not difficult, but uncomfortable”, while others also found the overall speed to be “not that comfortable” (Flora). Participants often reported that “feeling comfortable” was a part of their assessment of the requirements and easy-to-use parts of the UMUX-Lite questionnaire.
“In some of the walks, you’re made very aware that you’re in a VR headset, and it just doesn’t feel like the normal way of walking. Whereas in some others it feels more natural: even though you’re walking very fast and stuff, you kind of forget that you’re in a headset.” (Rokso)
5.5.2 Control, effort, and difficulty
In several instances, the participants reported that the system responded unexpectedly. Unexpected virtual movement occurred in all three parts of the traversal: the starting, steady-state walking, and stopping. Mostly, the comments regarding what might be a “feeling of control” related to the moment of stopping or the perceived virtual speed while approaching the target. Either the participant felt that they had to, and could, control their physical walking speed to adjust the virtual speed to stop on the target or that they were not in control of their speed. In particular, several participants noted that a very long stop would make them feel like they were being stopped before the target and that they had to take additional steps to arrive. For example, Kane said that “the times where I got annoyed with that, I had to walk so much further in the end. Because it’s, I mean, I know I had to walk the same distance, but it felt like I had to walk further.” In contrast, the sudden stops were difficult to use, and some participants reported that they felt they had to consciously and physically slow down to compensate. Participant expectations regarding the deceleration towards the target can be a source of increased difficulty: “\(\ldots\) when I [messed up] it was because it did not stop. And I was expecting it to, like, slow down right before the end” (Flora).
When the system did not respond as expected, an additional physical and mental effort was needed to compensate. Some participants (e.g., Notus, Mukesh) felt that a good function would allow them to land on the target with their final step, not requiring additional effort, half steps, or walking velocity adjustment. Notus felt that a good function is easy to use: “I hit the target perfectly without having to think about [having to] adjust my step or anything. It just comes... fluidly.” Others mentioned a mental effort of “thinking.” For example, Mukesh said: “None of them required conscious thinking, but a couple of them made you revise your expectations about what a step does.” Bellatrix preferred to “have time to get your bearings, and you know, figure, okay, this is where I want to go, instead of just, you know, having to adjust very suddenly.”
Due to the accuracy demand of the task and the “easy-to-use” question in UMUX-Lite, many participants commented on a particular function being “easier” or “harder.” Unsurprisingly, participants perceived the functions where there was a lack of control or that required additional effort as more difficult. Although interestingly, none of our participants felt that the start condition was difficult.
“Sometimes I had to, like, be careful about the step before it stopped. I had to time it a bit or take a bigger step to get there, or else I would have to take another step or something like that. And sometimes it stopped a bit before: like, it slowed down a bit before the red line, and then I had to take the decision whether I would take a couple more steps or just take a bigger step to get onto it.” (Columba)
6 Discussion
The participants thought walking with a high gain was fun and easy to use. So, these techniques could not just be used for efficient transportation in the absence of discomfort but also as a more entertaining means to explore the virtual world. Some participants even said walking with their best transfer function felt “natural”, like real-life walking. This response is highly encouraging for developing asymmetric transfer functions and using high-gain locomotion techniques. Typically, the main goal of such techniques is to allow users to travel quickly and comfortably across a large virtual world. While other techniques for this goal exist (e.g., flying or teleportation metaphors), non-isometric walking is directly coupled to physical walking. The benefits of physical walking may improve immersion, embodiment, or spatial orienting performance. This work shows that walking with a high gain can offer a good user experience and performance.
6.1 Asymmetric transfer functions
Figure 6 shows that the majority of participants (85%) prefer a long deceleration distance (i.e., a low \(\alpha _{stop}\) value). About half of those prefer a deceleration much longer than their acceleration, resulting in strongly asymmetrical transfer functions. Our results suggest that giving users enough time to slow down is crucial while optimizing for smooth starts can further improve the user experience.
Users need time to plan and execute their stops to maintain a steady gait and avoid discomfort. We also found this requirement in the Qualities of Walking, such as Control and Comfort (see Sect. 5.5). The results suggest that the stopping deceleration should closely match the users’ “expectations” so that they do not have to think about their foot placement and movement. How much time or distance is needed is not immediately apparent, but it could be related to the user’s velocity and step size: When walking through natural terrain or driving through corners, we use a feed-forward control that requires looking ahead \(\approx 1.5\) seconds (Matthis et al. 2018; Land and Lee 1994). By lowering the gain during the target approach, we can give users more time to plan their stops for accuracy and comfort. Controlling the stop velocity is more difficult in existing velocity-controlled functions, where the gain only lowers when the user physically slows down, typically at the last steps before the target. Future work should investigate the requirements for stopping when traveling at high speed in VR and how we can apply this to transfer function design.
The task requirement to stop accurately in a particular location may have led to participants wanting to slow down to improve accuracy. In contrast, the moment of starting to walk has no accuracy requirement and simply going as fast as is comfortable is sufficient. However, participants always stopped close to the target regardless, even in the sudden stop configurations, because the gain would be disabled after. Since the accuracy requirement is easily satisfied, we believe that the low regard for sudden stops is due to the adverse effects on the user experience. Future work should investigate whether the best stopping deceleration changes if, instead, the goal is to stop as quickly as possible and whether this could be more important than stopping comfortably. However, based on our results, we propose that stopping in high-gain walking always requires a smooth deceleration, although the amount of “smoothness” may depend on the individual user.
In the interview, many participants expressed no strong preference for a particular starting configuration. This also shows in the results in Fig. 6, where the best \(\alpha _{start}\) values are more evenly distributed than the \(\alpha _{stop}\) values. Based on the usability scores and interview comments, the benefit of optimizing the starting configuration may be less than for the stopping configuration (Fig. 7). However, some participants mentioned that very short or very long stopping distances could break immersion or cause VR sickness. Interestingly, the optimization algorithm was able to determine a clear optimal value in most cases, even if the participant did not verbally express a preference between starting configurations. Therefore, we suggest always using nonlinear acceleration when starting to walk and avoiding sudden or prolonged acceleration moments. However, we expect the best starting configuration to vary based on the task requirements, such as preventing high gain values during maneuvering (as in Williams-Sanders et al. (2019)), requiring high accuracy when starting to walk, or repeated accelerations in quick succession.
The qualities of walking overlap with qualitative comments reported in previous work: Abtahi et al. (2019) reported that preference was based on feeling more in control, more natural, or more comfortable, meeting user expectations, and being easy to use. It is promising that similar walking-based techniques for long-distance travel share similar qualities of walking. Future work should investigate how these qualities vary between techniques, how we can reliably measure this effect, and whether the quality of walking constitutes a measurable core component of travel in VR. Such a measure of user experience could provide a better assessment of the quality of VR travel in general.
6.2 Optimizing transfer functions
Although combining user studies and optimization can be tricky, we have successfully demonstrated that this approach can be used to determine good designs quickly. We have used a Bayesian Optimization approach to efficiently sample and evaluate transfer functions across a wide range of possible configurations. The results showed marked individual differences between the best transfer functions and significant benefits in user experience for the best functions. These results can serve as prior models for future research on evaluating or optimizing transfer functions for walking in VR. We encourage future work to further explore the application of optimization to VR locomotion and suitable goodness functions.
Based on previous work, we expected users to lower their walking velocity due to being exposed to disturbing acceleration effects (Janeh et al. 2017; Tirado et al. 2019). So, apart from user experience, we also optimized for performance by including the time-to-target component in our fitness function. Although we did not compare our results to out-of-VR walking, we found no evidence that users significantly changed their walking speed during the experiment or individual trials. On the contrary, we found that users walked faster on average compared to previous work: 1.25 m/s compared to 1.0 m/s in Janeh et al. (2017). This result is encouraging since this is close to the preferred walking speed for real-world walking: 1.2–1.25 m/s (Multon and Olivier 2013).
Although we did observe some gait disturbances during the experiment, we believe that the six traversals were indeed enough to adapt and prevent measurable effects on walking velocity. When participants were trying the technique for the first time, we observed stumbling, swaying, and inconsistent steps. However, after the ten practice trials, all participants felt confident in their ability to walk with a high gain. Previous work has suggested that users may take smaller but more frequent steps when walking in VR to compensate for unbalanced gait (e.g., Mohler et al. 2007a, b; Rieser et al. 1995). In our case, it may be that the walking velocity was unaffected, but the participants’ gait was. Although we also performed some exploratory analysis on step size, we could not find evidence of this.
In the user study, we used only one average gain value and one physical distance to maximize the number of optimization rounds to ten while keeping the study duration and sickness effects under control. We can speculate that a longer physical distance or lower gain values can use smaller \(\alpha\) values. There may not be a difference for larger gain values, but for smaller distances, it will depend on the distance, the gain, and the task requirements. For example, a gain of 20 on a distance of one meter would require more than just optimized \(\alpha\) values. In this work, we found that the ability to slow down in time and thus stop in a controlled and comfortable manner is an essential user requirement. We expect this to translate to other travel tasks. Future work should investigate the requirements for starting and stopping acceleration in more depth, particularly for different travel tasks. Finally, the particular transfer functions in our results should not be applied directly in future applications. Instead, we propose calibrating the transfer function to an individual as the preferred approach.
7 Conclusions
In this work, we have presented the steps required to design good transfer functions for walking with a high gain in Virtual Reality. We discussed how we could vary the acceleration and deceleration curves of a transfer function to generate distinct, asymmetric configurations. In a user study, we evaluated these configurations while optimizing for user experience and task performance. We found that we can successfully predict the user’s best configuration. Furthermore, the predicted best configurations for users are individual, asymmetric, and much better in terms of usability and quality of walking. Finally, we have collected and analyzed qualitative data on the quality of VR walking, and we propose that the following qualities matter most to users: Naturalness, Enjoyment, Difficulty, Comfort, Effort, and Control. Our work shows that good transfer functions can feel like natural walking, even for high-gain values.
8 Supplementary information
In the supplementary material we provide a PDF with plots of the per-participant optimization models, the raw and annotated data files, materials and resources, and the Python (Notebook) code used for analysis. The source code of our applications can be provided upon request.
Notes
Some authors have used gain values of up-to 100 (e.g., Williams-Sanders et al. 2019).
As opposed to the relatively newer XR Plugin Management
References
Abtahi P, Gonzalez-Franco M, Ofek E, Steed A (2019) I’m a Giant: Walking in Large Virtual Environments at High Speed Gains. In: Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, CHI ’19, pages 1–13. Association for Computing Machinery, New York, NY, USA. ISBN 978-1-4503-5970-2. https://doi.org/10.1145/3290605.3300752
Frank S, Gerd B, Jason J, Harald F, Markus L (2010) Estimation of detection thresholds for redirected walking techniques. IEEE Trans Vis Comput Graph 16(1):17–27. https://doi.org/10.1109/TVCG.2009.62
Golding JF (1998) Motion sickness susceptibility questionnaire revised and its relationship to other forms of sickness. Brain Res Bull 47(5):507–516
Interrante V, Ries B, Anderson L (2007) Seven league boots: a new metaphor for augmented locomotion through moderately large scale immersive virtual environments. In: 2007 IEEE Symposium on 3D User Interfaces. https://doi.org/10.1109/3DUI.2007.340791
Janeh O, Langbehn E, Steinicke F, Bruder G, Gulberti A, Poetter-Nerger M (2017) Walking in virtual reality: effects of manipulated visual self-motion on walking biomechanics. ACM Trans Appl Percept 14(2):121–1215. https://doi.org/10.1145/3022731
Janeh O, Katzakis N, Tong J, Steinicke F (2019) Infinity walk in VR: effects of cognitive load on velocity during continuous long-distance walking. In: ACM Symposium on Applied Perception 2019, SAP ’19, pages 1–9. Association for Computing Machinery, New York, NY, USA. ISBN 978-1-4503-6890-2. https://doi.org/10.1145/3343036.3343119
Kennedy Robert S, Lane Norman E, Berbaum Kevin S, Lilienthal Michael G (1993) Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. Int J Aviat Psychol 3(3):203–220. https://doi.org/10.1207/s15327108ijap0303_3
Land MF, Lee DN (1994) Where we look when we steer. Nature 369(6483):742–744. https://doi.org/10.1038/369742a0
Langbehn E, Lubos P, Steinicke F (2018) Evaluation of Locomotion Techniques for Room-Scale VR: Joystick, Teleportation, and Redirected Walking. In: Proceedings of the Virtual Reality International Conference - Laval Virtual, VRIC ’18, pages 1–9. Association for Computing Machinery, New York, NY, USA,ISBN 978-1-4503-5381-6. https://doi.org/10.1145/3234253.3234291
Lewis JR, Utesch BS, Maher DE (2013) UMUX-LITE: When There’s No Time for the SUS. In: Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, CHI ’13, pages 2099–2102, New York, NY, USA. Association for Computing Machinery, Paris, France. ISBN 978-1-4503-1899-0. https://doi.org/10.1145/2470654.2481287
Matthis JS, Yates JL, Hayhoe MM (2018) Gaze and the control of foot placement when walking in natural terrain. Curr Biol 28(8):1224-1233.e5. https://doi.org/10.1016/j.cub.2018.03.008
Meta Quest Support (2022) What’s ipd and how do i adjust it on my oculus quest 2 or quest?. URL https://support.oculus.com/articles/getting-started/getting-started-with-quest-2/ipd-quest-2/
Meta Platforms Inc (2022) Adaptive experimentation platform. URL https://ax.dev/
Mohler BJ, Campos JL, Weyel MB, Bülthoff HH (2007a) Gait Parameters while Walking in a Head-mounted Display Virtual Environment and the Real World. In: Bernd F, Roland B, and Robert van L (Eds), Eurographics Symposium on Virtual Environments, Short Papers and Posters. The Eurographics Association. ISBN 978-3-905673-64-7. https://doi.org/10.2312/PE/VE2007Short/085-088. URL http://diglib.eg.org/handle/10.2312/PE.VE2007Short.085-088
Mohler BJ, Thompson WB, Creem-Regehr SH, Willemsen P, Pick Jr. HL, Rieser JJ (2007b) Calibration of locomotion resulting from visual motion in a treadmill-based virtual environment. ACM Trans Appl Percept, 4(1):4–es. https://doi.org/10.1145/1227134.1227138
Multon F, Olivier AH (2013) Biomechanics of walking in real world: naturalness we wish to reach in virtual reality. In: Steinicke F, Visell Y, Campos J, Lécuyer A (eds) Human walking in virtual environments: perception, technology, and applications. Springer, New York, NY, pp 55–77
Nabiyouni M, Saktheeswaran A, Bowman DA, Karanth A (2015) Comparing the performance of natural, semi-natural, and non-natural locomotion techniques in virtual reality. In: 2015 IEEE Symposium on 3D User Interfaces (3DUI), pp 3–10. https://doi.org/10.1109/3DUI.2015.7131717
Nabiyouni M, Bowman DA (2016) A taxonomy for designing walking-based locomotion techniques for virtual reality. In: Proceedings of the 2016 ACM Companion on Interactive Surfaces and Spaces, ISS ’16 Companion, pp 115–121. Association for Computing Machinery, New York, NY, USA ISBN 978-1-4503-4530-9. https://doi.org/10.1145/3009939.3010076
Nguyen A, Cervellati F, Kunz A (2017) Gain compensation in redirected walking. In: Proceedings of the 23rd ACM Symposium on Virtual Reality Software and Technology, VRST ’17, pp 1–4. Association for Computing Machinery, New York, NY, USA. ISBN 978-1-4503-5548-3. https://doi.org/10.1145/3139131.3139167
Peck TC, Uchs H, Whitton MC (2011) An evaluation of navigational ability comparing Redirected Free Exploration with Distractors to Walking-in-Place and joystick locomotio interfaces. In: Proceedings of the 2011 IEEE Virtual Reality Conference, VR ’11, pages 55–62. IEEE Computer Society, USA ISBN 978-1-4577-0039-2. https://doi.org/10.1109/VR.2011.5759437
Riecke Bernhard E, Bodenheimer Bobby, McNamara Timothy P, Williams Betsy, Peng Peng, Feuereissen Daniel (2010) Do We Need to Walk for Effective Virtual Reality Navigation? Physical Rotations Alone May Suffice. In Christoph Hölscher, Thomas F. Shipley, Marta Olivetti Belardinelli, John A. Bateman, and Nora S. Newcombe, editors, Spatial Cognition VII, Lecture Notes in Computer Science, pages 234–247. Springer, Berlin, Heidelberg. ISBN 978-3-642-14749-4. https://doi.org/10.1007/978-3-642-14749-4_21
Rieser JJ, Pick HL, Ashmead DH, Garing AE (1995) Calibration of human locomotion and models of perceptual-motor organization. J Exp Psychol Hum Percept Perform 21(3):480–497. https://doi.org/10.1037/0096-1523.21.3.480
Ruddle RA, Lessels S (2009) The benefits of using a walking interface to navigate virtual environments. ACM Trans Comput Hum Inter 16(1):5:1-5:18. https://doi.org/10.1145/1502800.1502805
Tirado CCA, Chen H-T, Lin C-T (2019) Analysis of VR Sickness and Gait Parameters During Non-Isometric Virtual Walking with Large Translational Gain. In: The 17th International Conference on Virtual-Reality Continuum and its Applications in Industry, VRCAI ’19, pp 1–10. Association for Computing Machinery, New York, NY, USA ISBN 978-1-4503-7002-8. https://doi.org/10.1145/3359997.3365694
Unity Technologies (2013) What is the math behind AnimationCurve.Evaluate? - Unity Answers. URL https://answers.unity.com/questions/464782/t-is-the-math-behind-animationcurveevaluate.html
Usoh M, Arthur K, Whitton MC, Bastos R, Steed A, Slater M, Brooks FP (1999) Walking \(>\) walking-in-place \(>\) flying, in virtual environments. In: Proceedings of the 26th annual conference on Computer graphics and interactive techniques, SIGGRAPH ’99, pp 359–364. ACM Press/Addison-Wesley Publishing Co., USA ISBN 978-0-201-48560-8. https://doi.org/10.1145/311535.311589
Williams-Sanders B, Carr T, Narasimham G, McNamara T, Rieser J, Bodenheimer B (2019) Scaling Gain and Eyeheight While Locomoting in a Large VE. In: Chen Jessie YC, Fragomeni Gino, (eds.), Virtual, Augmented and Mixed Reality. Multimodal Interaction, Lecture Notes in Computer Science, pages 277–298. Springer International Publishing, Cham ISBN 978-3-030-21607-8. https://doi.org/10.1007/978-3-030-21607-8_22
Williams B (2008) Design and evaluation of methods for motor exploration in large virtual environments with head-mounted display technology. Dissertation, Vanderbilt University, Nashville, Tennessee. URL https://ir.vanderbilt.edu/handle/1803/13812
Williams B, Narasimham G, McNamara TP, Carr TP, Rieser JJ, Bodenheimer B (2006) Updating Orientation in Large Virtual Environments Using Scaled Translational Gain. In: Proceedings of the 3rd Symposium on Applied Perception in Graphics and Visualization, APGV ’06, pages 21–28, New York, NY, USA, Boston, Massachusetts, USA Association for Computing Machinery. ISBN 1-59593-429-4. https://doi.org/10.1145/1140491.1140495
Wilson G, McGill M, Jamieson M, Williamson JR, Brewster SA (2018) Object Manipulation in Virtual Reality Under Increasing Levels of Translational Gain. In: Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, CHI ’18, pages 1–13. Association for Computing Machinery, New York, NY, USAISBN 978-1-4503-5620-6. https://doi.org/10.1145/3173574.3173673
Zanbaka C, Babu S, Xiao D, Ulinski A, Hodges LF, Lok B (2004) Effects of travel technique on cognition in virtual environments. In: IEEE Virtual Reality 2004, pp 149–286. https://doi.org/10.1109/VR.2004.1310068
Acknowledgements
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie grant agreement No. 801199. The project has been supported by the Presence Lab granted by the Carlsberg Foundation, application CF20-0686.

Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors report no conflicts of interest. Informed consent was obtained from all participants prior to the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Appendix A Quality of walking
Appendix A Quality of walking
We present the results from the 15–20 minute semi-structured interview that we conducted with all participants at the end of the study. Our aim is to explore and describe the qualities of VR walking with variations of transfer functions.
To analyze the interview data, we first transcribed all the participant statements from audio files into text snippets. Two of the authors then started organising the text snippets into categories describing different qualities or features of walking through a 2.5-hour affinity diagramming session. The categories were adjusted with edits, additions, and deletions during the session. The rest of the snippets were later labelled into categories on a digital sheet (some with many labels) by one author. We found the participants describing their experiences in terms of six qualities: Naturalness, Enjoyment, Difficulty, Comfort, Effort, and Control. Next, we provide insights into the six qualities.
1.1 A.0.1 Naturalness
During the interview, participants often described their experience as “feeling natural” or “feeling like normal walking”. Rokso said “[It] was based on a feeling of whether it felt like good walking, more natural in a way, or felt kind of off.” After trying out their predicted best configuration, another participant, Ximeno, said: “I guess I would say it just feels like normal walking”, and when comparing their best configuration to another: “The first one was also fine in the sense that I was like, comfortable and everything but I could tell that the second one was better, actually: an even more natural feeling.” In contrast, they described more negative experiences often as “unnatural”, “weird”, or “a bit off”.
The moment of starting and stopping to walk is related to a “natural” feeling. For example, the sudden start was sometimes referred to as a “glitch” or “strange”. Tara compared the experience of a slow starting acceleration to starting to run, noting that “in real life, if you start running, the speed increases, [but] it’s not that at some point [it will suddenly increase]. So I think that’s the feeling that just puts me off a little bit.” When talking about their experience in the stop condition, Mukesh said that “\(\ldots\) they all felt very, very good. Or a couple were completely natural. And you didn’t have to think at all.” On the other hand, during the experiment Dana exclaimed “I’m not doing what feels natural, [I’m] just trying to compensate for the sensitive finish line.” when walking with \(\alpha _{stop}\approx 0.95\) (sudden stop).
A couple of participants indicated a positive correlation between how “natural” or “normal” a configuration feels and the degree to which they feel present or immersed in the virtual environment. Specifically, a negative configuration such as the sudden stop, could “\(\ldots\) break the illusion” (Dana). Similarly, Silvestre commented “It was the feeling of like, virtual and not real. The others were very real. Even the fast walk.” regarding the sudden stopping. One other comment highlights the potential relationship quite well: when inquired about what “feeling a bit off” meant, Rokso responded by saying:
“In some of the walks, you’re made very aware that you’re in a VR headset, and it just doesn’t feel like the normal way of walking. Whereas in some others it feels more natural: even though you’re walking very fast and stuff, you kind of forget that you’re in a headset.”
1.2 A.0.2 Enjoyment
Almost all participants thought walking in VR with high-gain was fun or said they enjoyed it. Some configurations in particular may have been more fun than others. For example, during the experiment Arni exclaimed “I need an extra fun category; that was nice!”, when walking with a slow start of \(\alpha _{start}=0.4\). Bellatrix was very enthusiastic overall and said “I definitely had fun!”, and used “fun” as one of their main descriptors: “\(\ldots\) when the finish line was suddenly upon you, and you just had no chance to react basically. I mean, that took a bit of the fun of it out of it, \(\ldots\)” On the other hand, Kane did not have a negative feeling, but felt it was “fine” and “a bit boring” (Kane). Some participants felt that a configuration would be “annoying” if it did not behave as desired. For example, both a very slow stop (\(\alpha _{stop}\approx 0.65\)) and a very fast stop (\(\alpha _{stop}\approx 0.95\)) were regarded as annoying by Terah and Arni respectively, saying: “The thing that’s annoying me is that I have to stop before taking my last step.” and “The annoying one was when it did not slow down in the end, and you really had to stop.” Notus also referred to both the starting acceleration and the velocity or acceleration in the stopping moment like this: “But like when you slow down, it almost comes as a shock almost every time when it’s like, too fast. And it always causes annoyance when it’s too slow.” Bellatrix (paraphrased) nicely illustrates a possible difference between a configuration being easy to use and it being enjoyable:
“The requirements question was: how much did I like it? But the second one, easy-to-use, was much more subjective: it could be easy to use, meaning whether I felt like I hit the finish line, but, I did not necessarily enjoy it. So, to me easy-to-use was enjoyment.”
1.3 A.0.3 Difficulty
The task in the experiment required users to stop on the target mark as accurately as possible. The UMUX-Lite questionnaire contains a question asking how “easy to use” the configuration is. It is thus no surprise that many participants commented on configurations being “easier” or “harder”. It seems that there is a desire to be accurate, and that being accurate becomes more difficult in certain configurations. Parnel interpreted the requirements question as relating to accuracy and later added that another relevant question could have been “more or less precise”. They said that when given enough time to slow down “\(\ldots\) it felt like I could be more accurate.”
Perhaps the difficulty arises from some expectation of the user regarding the deceleration towards the target, as is illustrated by Flora’s comment: “\(\ldots\) when I messed up it was because it didn’t stop. And I was expecting it to, like, slow down right before the end. This is further supported by the fact that none of our participants felt that the start condition was difficult. In the experiment, Bogomil drew the short straw and received stop configurations with the fastest decelerations first. As they walked through \(\alpha _{stop} = 0.85, 0.95, 0.75\) we could see them stumbling, swaying, and struggling to stop smoothly. Then, when going through \(\alpha _{stop} = 0.75, 0.65\), they exclaimed: “I feel like it’s getting easier and easier!”
1.4 A.0.4 Comfort
A large portion of participants used “comfort” to describe their experiences. They would say that the overall experience, or a particular configuration would feel “comfortable”. For example, Dana said: “I think comfort was my biggest requirement, right? Actually feeling that I trusted the system, but also feeling that I felt comfortable walking in the space.” For Haizea, “comfort” was more related to a feeling of control over their movements, saying: “I think I just felt maybe more comfortable when like, I could also feel like I can control my walking.” When asked about what specifically influences their comfort level, they responded: “[Whether] I felt, like, safe walking, and [that I’m] not gonna, like, fall, or trip or lose my balance.” Most participants reported that they felt comfortable, or even “very comfortable” (Bellatrix) during the experiment. However, some conditions were reported as being “uncomfortable”, particularly the fast start and sudden stop configurations (\(\alpha _{start}<0.05\) and \(\alpha _{stop}>0.95\)). Kasey explained that the fast starting speed was “not difficult, but uncomfortable”, while others also found the overall speed to be “not that comfortable” (Flora), or complained about sudden stops: “\(\ldots\) the ones where the deceleration was very abrupt; that was the most uncomfortable” (Ximeno). Sometimes participants could not or did not explain what they meant by “comfortable/uncomfortable”, but they often reported “feeling comfortable” as being part of their assessment of the requirements and easy-to-use parts of the UMUX-Lite questionnaire.
1.5 A.0.5 Effort
The participants referred to both physical and mental effort of VR walking with gain functions in their statements. As an example of physical effort, some participants (e.g., Notus, Mukesh) felt that a good configuration would allow them to land on the target with their final step. That is, not requiring additional effort, half steps, or walking velocity adjustment. Some participants went one step further and directly related their required effort to their gait, or the way they (had to) control their steps. Notus felt that it was “\(\ldots\) almost a natural walk when the configuration was right”, and that it would be very easy to use: “I hit the target perfectly without having to think about [having to] adjust my step or anything. It just comes.. fluidly.”
Others also mentioned such mental effort of “thinking”. For example, Mukesh said: “None of them required conscious thinking, but a couple of them made you revise your expectations about what a step does. So I guess the ones that I didn’t rate very easy to use, [are so] because it made me think twice about what a step is.” Bellatrix preferred to “have time to get your bearings, and you know, figure, okay, this is where I want to go, instead of just, you know, having to adjust very suddenly.” Other participants also felt like they had to explicitly think about their steps in some configurations; Colomba summarizes this effect nicely:
“Sometimes I had to, like, be careful about the step before it stopped. I had to time it a bit or take a bigger step to get there, or else I would have to take another step or something like that. And sometimes it stopped a bit before: like, it slowed down a bit before the red line, and then I had to take the decision whether I would take a couple more steps or just take a bigger step to get onto it.”
1.5.1 A.0.6 Control
In several instances, the participants reported that the system responded in an unexpected way. This happened in all three parts of the traversal: the starting, the middle, and the stopping. For the starting moment, a low \(\alpha _{start}\approx 0.05\) causes the amplified movement to begin immediately, for even the smallest head movement. Both Emiliya and Silvestre believed it to be some sort of glitch, whereas Flora said: “First, when I didn’t expect it, I felt like falling. Because I was like, ‘Oh, no, no, the ground [is] being removed’.”
Mostly, the comments relating to what might be a “feeling of control” related to the moment of stopping, or the perceived virtual speed while approaching the target. Either the participant felt that they had to, and could, control their physical walking speed to adjust the virtual speed to stop on the target, or that they were not in control of their speed. In particular, several participants noted that a very slow stop (low \(\alpha _{stop}\)) would feel like they were being stopped before the target, and that they had to take additional steps to arrive. For example, Kane said that “the times where I got annoyed with that, I had to walk so much further in the end. Because it’s, I mean, I know I had to walk the same distance, but it felt like I had to walk further.” In contrast, the sudden stops were difficult to use (as discussed previously), and some participants reported that they felt like they had to consciously and physically slow down to compensate. For example, Ximeno had to “slow down my physical walking speed to get to the to stop at the right place. Or at least it felt like it.” A more gradual stop also allowed for another aspect of locomotion, perhaps related to motor control planning or navigation. For example, Haizea wanted to be “...in control of their walking” and Kasey said that “it’s more important to have the possibility to choose how and where I stop”.
The functions with low/high \(\alpha\) values, resulting in sudden acceleration, often received negative comments both during the study and interview: participants found these “constant gain” configurations difficult to use and uncomfortable, especially when stopping. Kane said about the sudden conditions: “The one that stopped really.. suddenly, it was a rated low because I found it difficult to stop.” Other participants reported similar difficulties and said it may be because they did not have enough time to stop normally, or because the sudden stop caused them to lose their balance. We often saw participants stumble or almost fall forward when they first encountered a sudden stop, and most continued struggling to stop smoothly on the target. However, some participants did not mind it too much, for example: Bellatrix struggled to stop as well, but later said: “\(\ldots\) I had fun doing it, even if, if sometimes the finish line would just, you know, be there all of a sudden.” Only a couple of users reported that they found the sudden start disturbing, saying it felt like a “glitch”, or “\(\ldots\) that the walls start moving before me”.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
van Gemert, T., Hornbæk, K. & Bergström, J. Step on it: asymmetric gain functions improve starting and stopping in virtual reality walking. Virtual Reality 27, 777–795 (2023). https://doi.org/10.1007/s10055-022-00692-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10055-022-00692-w