
Abstract
Because of EEDI regulations for ships and SDGs, it is of vital importance to develop ships with good propulsion performance, not only in still water, but also in waves. To predict the propulsion and seakeeping performance in waves, and in particular ship motions and added resistance, various theoretical calculation methods and CFD codes have been developed. To validate these estimation methods, experimental data on details of the flow induced by the ship disturbance are required. To meet this demand, the authors developed an innovative method for measuring and analyzing the spatial pressure distribution over the ship-hull surface using a large number of Fiber Bragg Grating (FBG) pressure sensors. However, pressure measurements with the conventional FBG pressure sensors are largely influenced by the difference in the temperature between water and air, referred to as the temperature interference. To resolve this issue, the authors developed a new FBG pressure sensor that incorporates three improvements and is significantly less influenced by temperature interference. Its performance was confirmed through comparisons with measured pressures obtained using existing strain-type and conventional FBG pressure sensors. Furthermore, the effects of different materials used for manufacturing ship models on the pressure measurement were investigated experimentally in towing tank tests. Finally, an experimental study was conducted to determine which of the three improvements in the latest FBG pressure sensor is essential for reducing the temperature interference.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
As a countermeasure for recent global warming, the EEDI regulations have been implemented and enforced, and will be further tightened. Therefore, it is even more important to develop hull forms with high propulsion performance in waves. The prediction of propulsion performance in waves requires accurate estimations of seakeeping performance. Seakeeping performance can be discussed based on two types of physical quantities: global and local. Global physical quantities are integrated values, such as hydrodynamic forces and ship motions, among others. On the other hand, local physical quantities are integrands or components for the global physical quantities, such as the wave field around an oscillating ship and the pressure on the ship hull. To estimate these quantities more accurately, various theoretical calculation schemes have been developed as alternatives to the strip methods [1, 2] (e.g., [3,4,5,6]). Recently, with the development of computer technologies, computed results of seakeeping performance have been produced with Computational Fluid Dynamics (CFD) (e.g., [7,8,9,10]). These sophisticated schemes are expected to estimate the local pressure on the ship-hull surface of complex shapes around the bow that cannot be captured with sufficient accuracy by strip methods. Knowledge about the local pressure obtained from high accuracy schemes will lead to the development of ship hulls with better fuel efficiency. However, the accuracy of these calculation methods is often validated using only measured values of global quantities; this should be done using both global and local physical quantities. Validation of the accuracy of local physical quantities in sophisticated schemes is difficult because experiments carried out for local physical quantities have been insufficient to date and little data are available. Conversely, experiments to obtain global physical quantities have been extensively carried out and an abundance of data has been accumulated. Therefore, new developments in Experimental Fluid Dynamics (EFD) for obtaining local physical quantities in the seakeeping field are required.
The strain-type pressure sensor has been conventionally used for measuring the pressure on the ship hull, with some results having been reported so far [11, 12]. However, the sensor must be embedded at selected positions on the ship hull, rather than on the whole hull surface. Thus, it is difficult to use strain-type pressure sensors to measure pressures at multiple points. Moreover, each sensor uses an amplifier (dynamic strain meter). When multiple point measurements are planned, the same number of amplifiers as sensors are required, but generally, amplifier quantities in the hundreds cannot be accommodated. Finally, the sensor has a length about 3 cm. Hence, the sensor cannot be embedded at bow part with narrow breadth, even though the bow section is the most interesting part from the perspective of measuring pressures.
Another well-known method for measuring spatial pressure distribution is pressure-sensitive paint. In this method, a paint that reacts to light is applied to an object that must be inspected. By shining light on the object’s surface, the light intensity emitted by the paint is measured with a camera, and the pressure on it is acquired from the light intensity. A correction with temperature-sensitive paint is often used to remove the effects of temperature interference. This method is usually used for wind tunnel tests, but is not suitable for water tank tests because oxygen is necessary for the reaction between light and the paint. Details of this method are summarized in [13].
Recently, a new type of pressure sensor using Fiber Bragg Gratings (FBGs) was developed to measure the pressure on the entire ship hull surface [14, 15], and studies have been conducted to investigate its practical applications [16, 17]. The FBG pressure sensor has three primary features. First, it can be attached to the object’s surface without holes. Second, the pressure can be measured at multiple points simultaneously by using a single interrogator. Finally, it is very small and thin, and thus measurement is possible on almost the whole hull surface, including the bow area, where a strain-type pressure sensor cannot be used.
The pressure distribution data acquired from FBG pressure sensors have gradually started being used to validate numerical calculations [18,19,20,21]. These reports show the pressure data to be useful. Furthermore, to investigate where is dominant on the hull surface to the added resistance, the spatial distribution of added pressure was visualized using the acquired pressure distribution [22, 23]. The integration of the added pressure on the wetted hull surface becomes the added resistance. The hull-surface pressure around energy-saving devices has also been investigated [17], and the wave loads have been calculated from the measured pressure distributions without using a segmented model [24]. Based on these new results, the use of FBG pressure sensors to obtain the pressure distribution is being established as an innovative experimental method.
However, one of the conventional FBG pressure sensors, version 6 (ps1000-v6, CMIWS Co., Ltd.), has a problem in that it is strongly affected by the temperature difference between water and air after being attached to the ship model. According to previous studies [23, 24], this sensor is recommended for use under the condition of \(|\varDelta T|\le 1^\circ\)C, where \(\varDelta T\) indicates the temperature difference between the air temperature \(T_a\) and the water temperature \(T_w\) defined as \(\varDelta T = T_a-T_w\). For this reason, this sensor has the disadvantage that experiments in towing tanks cannot be conducted if the temperature difference between water and air is too large.
To remove this temperature difference restriction, a new FBG pressure sensor, version 7 (ps1000-v7, CMIWS Co., Ltd.), was developed. Version 7 incorporates three improvements over version 6. The first is an increase in the rigidity of the sensor frame, the second is the installation of a stainless steel sheet on the backside of the diaphragm, and the third is the adoption of the glass soldering method for fixing the pressure-sensitive part to the surface under pressure. In this study, we investigate the performance of this latest FBG pressure sensor from the viewpoint of sensitivity to the temperature difference \(\varDelta T\).
This paper is organized as follows. Section 2 briefly explains the principle of the FBG pressure sensor and its basic structures and introduces each improvement installed in version 7 in detail. Furthermore, the calibration method adopted and some notes of usage in the pressure distribution measurement are described. Section 3 introduces the towing tank tests and ship models used in the tests. Sections 4 and 5 describe the performance of the version 7 sensor by comparing it with a strain-type pressure sensor (SHVR-50k for 50kPa, NTL) and the version 6 sensor through calibration and towing tank tests. In the calibration tests, the calibration coefficients and the linearity are discussed through the root mean square error. In the towing tank tests, the results of steady and unsteady pressures obtained from each type of sensor are shown with averages and standard deviations. In Sect. 4, the performance of the version 7 sensor is confirmed by using two different ship models made with the same materials. In Sect. 5, the performance of the version 7 sensor is also investigated by using two ship models of the same shape, but with different materials, to determine the effect of the manufacturing material on the temperature interference. Section 6 describes the output tendency in each pressure sensor with one of the three improvements applied to version 6, and clarifies which improvement contributes to a decrease in temperature interference.
2 Fiber Bragg Grating pressure sensor
2.1 Principle and features
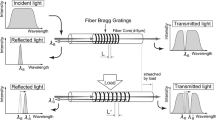
Figure 1a illustrates the principle of a Fiber Bragg Grating (FBG). FBG is a diffraction grating embedded into a fiber core that reflects a particular wavelength of light. The reflected wavelength is called the Bragg wavelength (\(\lambda _B\) in Fig. 1a). When the spacing between the reflectors changes because of deformation resulting from pressure, as shown in Fig. 1b, the Bragg wavelength also changes (\(\lambda _B'\) in Fig. 1a). The amount of change in this Bragg wavelength \(\varDelta \lambda _B=\lambda _B-\lambda _B'\) is used to estimate the pressure.
The FBG pressure sensor is sufficiently small (15 mm in length, 9 mm in width, and 0.6 mm in thickness) and can be attached to an object densely with circular double-sided tape without damaging the object. In addition, it is possible to arrange numerous FBGs with different Bragg grating spacings along with one optical fiber by using Wavelength Division Multiplexing (WDM) technology. The Bragg wavelengths reflected by the FBGs are measured and logged by an interrogator (Hyperion Si255-16-ST(1000Hz)-160-DP, Micron Optics, Inc., software; Enlight). Since this device can handle a large number of optical fibers with only one unit, pressures at hundreds of points can be measured simultaneously.
The structural diagrams of the conventional FBG pressure sensor, version 6 (ps1000-v6, CMIWS Co., Ltd., hereafter ver. 6), and the newly developed version 7 (ps1000-v7, CMIWS Co., Ltd., hereafter ver. 7) used in the tank tests, are shown in Fig. 2. The improvements installed in ver. 7 are described in the next subsection. Here, the common structure for both sensors is explained. In both ver. 6 and ver. 7 FBG pressure sensors, one FBG is embedded in the pressure-sensitive part and one in the temperature-sensitive part, respectively, as shown in the upper part of Fig. 2. The pressure measured by the pressure-sensitive part is adjusted by using the amount of expansion of the optical fiber due to the change in temperature, which is measured by the temperature-sensitive part. The frame in the temperature-sensitive part is made more rigid than that of the pressure-sensitive part by filling special glue to prevent being deformed by wave pressure. Only the pressure-sensitive part of the FBG pressure sensor is affixed to the ship hull with double-sided tape, as shown at the bottom of Fig. 2.

a Principle of FBG, b Principle of the FBG pressure sensor

Structural diagram of each FBG pressure sensor (upper: ver. 6, middle: ver. 7), and its side view showing how to attach to the ship hull (lower)
2.2 Improvements to the ver. 7 FBG pressure sensor
Three improvements were implemented from ver. 6 to ver. 7. The improvements are described in detail below.
The first improvement was an increase in the rigidity of the ring frame. When the ship model is submerged in water, the double-sided tape attaching the sensor to the hull absorbs a small amount of water. The deformation of the double-sided tape due to the absorbed water deformed the sensor frame of ver. 6. This would result in changes in \(C_P\) and \(S_T\), which are calibration coefficients described in Sect. 2.3. In ver. 7, the width of the ring frame for the diaphragm was widened to increase the rigidity of the sensor by 40 percent.
The second improvement was the installation of a stainless steel sheet on the diaphragm, as shown in Fig. 2. In ver. 6, the temperature-sensitive part touches the metal, while the pressure-sensitive part is covered by the polyimide film of the diaphragm. Therefore, there was a concern that the two sensor parts would be affected by different temperatures because the metal and polyimide have different heat propagation characteristics. To address this concern, a stainless steel sheet with a thickness of 10 \(\mu\)m was installed on the back of the diaphragm, and the pressure-sensitive part was modified to be affected by temperature through metal as well. The stainless steel sheet was provided with a large number of holes, giving adequate flexibility to provide the proper amount of deformation.
The third improvement was the adoption of the glass soldering method at both ends of the optical fibers in the pressure-sensitive part. Although fiber ends of the temperature-sensitive part in ver. 6 are fixed firmly by the glass soldering method, one end in the pressure-sensitive part is fixed by ultraviolet-curable (UV) adhesion due to a technical difficulty. However, the material used for UV adhesion has a bigger coefficient of thermal expansion than does glass. Hence, there is a concern that the deformation behavior of optical fibers due to temperature changes would differ between the temperature- and pressure-sensitive parts. To standardize the attachment of the optical fiber, the glass soldering method was adopted for ver. 7 for both the temperature- and pressure-sensitive parts. With this improvement, the deformation of the optical fiber due to temperature changes occurs in almost the same environment for both the temperature- and pressure-sensitive parts.
In Sect. 6, we prepare three sensors incorporating each of the three improvements individually, and confirm which improvement contributes to a decrease in temperature interference. In this paper, the sensors with the first, second, and third improvements incorporated in ver. 6 are called E01, E02, and E03, respectively.
2.3 Calibration tests
The calibration tests are very important for the towing tank tests with high accuracy by the FBG pressure sensors. This subsection describes how to evaluate the calibration tests, and Sects. 4–6 describe the performance of the FBG pressure sensors obtained in the calibration test.
Using the amount of change in the Bragg wavelength \(\varDelta \lambda _P\) and \(\varDelta \lambda _T\) obtained from the pressure- and temperature-sensitive parts, respectively, the pressure is estimated in the form
Here, \(C_P\) and \(S_T\) denote the pressure calibration coefficient and the temperature calibration coefficient provided by the manufacturer at the time of product delivery, respectively. Both are calculated in the laboratory before shipment using a pressure calibrator (for air) whose temperature can be adjusted. It should be noted that both coefficients are obtained under the same temperature environment for the pressure-sensitive part and the temperature-sensitive part.
\(C_f\) is the calibration coefficient obtained by attaching a pressure sensor to the ship model with double-sided tape at the experimental site and then performing a calibration test in water. The value of \(C_f\) can be considered a correction coefficient caused using the sensor in a different condition from the calibration environment before delivery, such as the effect of attaching the pressure sensor to the ship model with double-sided tape or to the curved surface of the ship model. If the calibration coefficients obtained in the laboratory and field show no difference, \(C_f\) is equal to 1.0. To obtain \(C_f\), the ship model with the FBG pressure sensors attached is forcibly submerged uniformly by a lifting device, as shown in Fig. 3, and the hydrostatic pressure is measured. It should be noted that the ship model is rigid enough and submerged parallelly to the water surface with a lifting-device without changing its attitude. And it is also confirmed that the seiche of the towing tank is negligible. The white circles in Fig. 4 are obtained first as the pressure set at \(C_f=1.0\) in eq.(1). Next, the sensor output obtained is approximated to the least square straight line, and its slope is calculated. The value of \(C_f\) is given so that the slope is equal to that of the hydrostatic pressure \(\rho g \varDelta z\) (\(\rho\): density of water, g: gravitational acceleration, \(\varDelta z\): sinkage), which is illustrated by the red line in Fig. 4.
In the evaluation of FBG pressure sensors, strain-type pressure sensors (SHVR-50k for 50kPa, NTL) are also used for comparison. The calibration coefficient \(C_f\) for a strain-type pressure sensor embedded in the ship model is calculated as \(P=C_f\,C_P\) (\(C_P\); calibration coefficient provided by the manufacturer of the strain-type pressure sensor).

Calibration of pressure sensors

An example of calibration outputs from an FBG pressure sensor
To confirm the linearity of the outputs in the calibration test conducted on-site, the outputs are evaluated by the Root Mean Square Error (RMSE), defined as follows:
Here, \(\varDelta z_j\) is the sinkage of the j-th step, \(P_j\) is the measured pressure in \(C_f =1.0\), \(\bar{P}(\varDelta z_j)\) is the pressure on the straight line given by the least-squares method, and n is the number of measured data. The unit of RMSE is Newton per meter squared (\({\mathrm{N/m^2}}\)). In a calibration test, after measuring the pressure at the initial point (regarded as zero), the pressure is measured while submerging the model at a pitch of 4 mm to a depth of 20 mm using the lifting device. Then, the pressure is measured while raising the model at a pitch of 4 mm from a depth of 18 mm. Finally, the model comes to its initial position and the pressure is measured again. The number n was 12 for this sequence of steps.
2.4 Notes on measurement with FBG pressure sensors
We have been performing pressure measurements and analyses using the FBG pressure sensors since 2015. Through our research during this period, we obtained the following findings.
-
(1)
In the case of pressure measurement with more than 300 FBG pressure sensors, the data transfer from an interrogator to a PC using a single LAN cable caused a delay, and the data also showed abnormal values. This problem was solved using two interrogators, distributing data to a PC with high processing power via two LAN cables, and using the latest version of the software (Enlight ver. 1.14.0). In addition, when data obtained at 1000 Hz by the interrogator are thinned to be at the same sampling rate as the electrical system (200 Hz in our case), the setting at which the original data are thinned at the time of data acquisition in the interrogator should be chosen. If the setting is made such that the data are thinned out when saving, the processing load will be large.
-
(2)
When the optical cable from the model to the interrogator on the towing carriage changes its shape either statically or dynamically because of the motion of the ship model or lifting device, it causes polarization of the light and significant fluctuations in the output value. To correct this effect, a depolarizer (paid) needs to be incorporated into the interrogator [23].
-
(3)
When pressure data obtained by the pressure sensors around the free surface are analyzed, the data of ship-side wave profiles are useful to determine accurately the timing of sensors plunging into and exiting out of the water [23, 24].
3 Towing tank tests

Photo of ship models: a RCS-U, b RBC-CW, c RBC-U

Positions of pressure sensors embedded/attached to RCS-U at ord.=8.5 and RBC-U/CW at ord.=9.0
For the investigation of ver. 7 concerning temperature interference, experiments were conducted in September 2020, September 2021, and December 2021 using three different ship models. All experiments were carried out in the towing tank of the Research Institute for Applied Mechanics (RIAM), Kyushu University.
In the experiment conducted in September 2020, the differences in temperature interference effects between ver. 6 and ver. 7 were investigated. The ship model that was used in the experiment was the Research Initiative of Oceangoing Ships [25] (RIOS) container ship, which is made of rigid polyurethane foam, as shown in Fig. 5a (hereafter abbreviated as RCS-U). The measurement conditions were at \(F_n=0.25\) in regular head waves with the wavelength-to-ship length ratio \(\lambda /L=0.9\) (\(L\equiv L_{pp}\)). The principal particulars of the model are shown in Table 1. Here, the origin is at midship on the draft plane, and x, y, and z axes are taken in the direction of the bow, port side, and vertical upwards, respectively. The superiority of ver. 7 was confirmed through this test, as will be described later, so the same investigation was conducted on the RIOS bulk carrier model, for which much data have been accumulated [4, 6, 26].
In September 2021, an experiment was conducted using the RIOS bulk carrier model made of chemical wood (hereafter abbreviated as RBC-CW). The model is shown in Fig. 5b. The principal particulars of the model are shown in Table 2. The purpose of this experiment was to investigate the differences in temperature interference effects between ver. 6 and ver. 7 as well as RCS-U. In addition, the performance of three types of sensors (E01, E02, and E03; see Sect. 2.2) was investigated and compared with the performance of ver. 7 to identify which improvement contributes to the reduction of temperature interference effects in ver. 7. This investigation is discussed in Sect. 6. The measurement conditions were at \(F_n=0.18\) in regular head waves with the wavelength-to-ship length ratio \(\lambda /L=1.25\). Finally, the experiment conducted in December 2021 used the RIOS bulk carrier model made of rigid polyurethane foam, as shown in Fig. 5c (hereafter abbreviated as RBC-U), to investigate the influence of the materials of the ship model on the temperature interference. The principal particulars of the model and the measurement conditions are the same as those for the RBC-CW.
Electric strain-type pressure sensors were also used in all experiments. The strain-type pressure sensor is screwed into a brass socket (tapped inside) that is installed in the model. Therefore, it is not readily affected by the material of the ship model. On the other hand, since the FBG pressure sensor is attached to the ship model with double-sided tape, it is expected that it would be affected by the thermal conduction characteristics of the material used for the ship model. Figure 6 shows the positions of embedded/attached pressure sensors. The parameter \(\theta\) represents the polar angle of the sensor position in a transverse section. The keel is defined to be \(\theta =0\) deg and the draft line to be \(\theta =90\) deg. The sections where sensors are equipped are at ord.=8.5 and 9.0 in RCS-U and RBC-U/CW, respectively. Here, ‘ord.’ indicates the ordinate of a transverse section. Ord.=0.0 and 10.0 correspond to the aft and fore perpendiculars, respectively.
In the analysis of the measured pressure data obtained from the towing test in regular head waves, the data of the ship-side wave profiles are used to judge whether the pressure sensor is exposed to air. For details of the experiments and data analysis, including the ship-side wave profiles, readers are referred to [23, 24].
4 Performance evaluation of ver. 7 on rigid polyurethane foam models (RCS-U and RBC-U)
In this section, the performance of ver. 7 is evaluated by comparing corresponding results from the strain-type pressure sensors and ver. 6 results obtained with RCS-U and RBC-U, which are different hull shapes, but are made of the same materials.
4.1 Calibration results and discussion

Calibration coefficients \(C_f\) for the strain-type pressure sensor and the FBG pressure sensors, ver. 6 and ver. 7 obtained for RCS-U at ord.=8.5 (\(N=13\))

Averages and standard deviations of calibration coefficients \(C_f\) obtained for RCS-U at ord.=8.5 (\(-2.8\,^\circ \hbox {C}\le \varDelta T\le +4.9\,^\circ \hbox {C}\), \(N=13\))

Calibration coefficients \(C_f\) for the strain-type pressure sensor and the FBG pressure sensors, ver. 6 and ver. 7, obtained for RBC-U at ord.=9.0 (\(N=10\))

Averages and standard deviations of calibration coefficients \(C_f\) obtained for RBC-U at ord.=9.0 (\(-3.9\,^\circ \hbox {C}\le \varDelta T\le +4.2\,^\circ \hbox {C}\), \(N=10\))
The results of the calibration coefficient \(C_f\) obtained with RCS-U in September 2020 with the strain-type pressure sensor and the ver. 6 and ver. 7 FBG pressure sensors are shown in Figs. 7 and 8. In Fig. 7, the horizontal axis is the temperature difference \(\varDelta T\) (\(=T_a-T_w\), where \(T_a\) is the air temperature measured at 10 cm above the water surface and \(T_w\) the water temperature measured at 10 cm below the water surface), and the vertical axis is the calibration coefficient \(C_f\). The results are shown for each sensor position \(\theta\). Figure 8 takes the sensor position \(\theta\) as the horizontal axis and the values of average and standard deviation of \(C_f\) in \(-2.8\,^\circ \hbox {C}\le \varDelta T\le +4.9\,^\circ \hbox {C}\) as the vertical axis. The sample size N of the measured data is \(N=13\). In both Figs. 7 and 8, the upper graph is the result of the strain-type pressure sensor, the middle graph is that of ver. 6, and the lower graph is that of ver. 7.
Figure 7 shows that all strain-type pressure sensors are almost independent of the temperature difference and \(C_f\simeq 1.0\). It can be confirmed that the influence of temperature interference and individual differences are small. On the other hand, \(C_f\) in ver. 6 indicates scattered values depending on the temperature difference \(\varDelta T\). Especially when \(\varDelta T\) is large, the effect of temperature interference is substantial, and the individual differences of \(C_f\) are also large. However, it can also be confirmed that the influence of temperature is relatively small in the temperature difference band \(|\varDelta T|\le 1.0\,^\circ \hbox {C}\) where the authors have been taking measurements using ver. 6 to date. On the other hand, the \(C_f\) in ver. 7 is almost constant around 1.0 regardless of \(\varDelta T\), although the individual differences are a little larger than those of the strain-type pressure sensors. In Fig. 8, although the standard deviations of ver. 7 are slightly larger than those of the strain-type pressure sensor, it is confirmed that the stability is comparable to that of the strain-type pressure sensor. Thus, from Figs. 7 and 8, it is clear that ver. 7 experiences fewer effects of temperature interference, that individual differences are smaller than those for ver. 6, and that the performance is greatly improved.
The results of the RMSE are shown in Fig. 11. Also, some original output examples from the calibration test, from which RMSE and \(C_f\) were calculated, are shown in Fig. 12. The RMSE of the strain-type pressure sensor is approximately 5 \({\mathrm{N/m^2}}\). This means that the variation of the measured value corresponds to about 0.5 mm water head. The output result in Fig. 12a shows that the linearity in measured values is high, and the slope of the least-squares straight line coincides with the theoretical value, as has already been confirmed by the correction coefficient \(C_f\fallingdotseq 1.0\) in Fig.7. On the other hand, the RMSE for ver. 6 gets larger as \(\varDelta T\) increases. The outputs in Fig. 12b and c also show hysteresis and zero-drift phenomena, but are much smaller than the theoretical values. The latter corresponds to the fact that \(C_f\) is larger than 1.0 in Fig. 7. In the case of \(C_f\ge 1.0\), the RMSE value is also multiplied by \(C_f\). This is undesirable because it results in a larger variation of the measured pressure data in the towing test. Although the RMSE in ver. 7 tends to increase when \(\varDelta T\) is large, hysteresis and zero-drift phenomena are smaller than those for ver. 6, as can be seen in Fig. 12e and f. In addition, the estimated slope of the straight line is not much different from the theoretical slope, as shown in Fig. 12d–f. Namely, ver. 7 shows \(C_f\fallingdotseq 1.0\) similar to the strain-type pressure sensor. Looking at the ver 6 results for RCS-U shown in Figs. 7 and 11, it can be seen that \(C_f\) and RMSE are more affected by temperature difference when \(\varDelta T\) is positive than when \(\varDelta T\) is negative and this tendency does not appear in RBC-U. The cause is not clear at present.
Figures 9 and 10 show results for \(C_f\) obtained using RBC-U in December 2021, which are expressed in the same manner as those in Figs. 7 and 8 for RCS-U. These results were derived using measurement data (\(N=10\)) obtained in the temperature difference band \(-3.9\,^\circ \hbox {C}\le \varDelta T\le +4.2\,^\circ \hbox {C}\). For these results, tendencies similar to those of RCS-U described above were found.
The results of the RMSE for RBC-U are shown in Fig. 13, and some original output examples from the calibration test are illustrated in Fig. 14. As can be seen in (g) and (h) in the figure, the zero drift phenomenon is clear when \(|\varDelta T|\) is large, even in the strain-type pressure sensor, which implies that the strain-type pressure sensor is not free from the influence of temperature interference. However, there is no decrease in output with \(C_f\fallingdotseq 1.0\). For ver. 6, there is no significant effect of temperature interference on the RMSE compared with the case of RCS-U, but as shown in Fig. 14i, the output drops and \(C_f\ge 1.0\). The RMSE of ver. 7, except for the sensor at \(\theta =15\) deg, is around 5 \({\mathrm{N/m^2}}\), but the RMSE at \(\theta =15\) deg is larger than 10 \({\mathrm{N/m^2}}\) regardless of \(\varDelta T\). The values of the output results show a variation as seen in Fig. 14j and k. Although there is no output reduction for this sensor and \(C_f\) is around 1.0, it is anticipated that there will be variations when it is used for pressure measurement in the towing test. For this reason, this pressure sensor must be regarded as malfunctioning.
When the acceptable value of variation in the measured values during the towing test is about \(p_c\) \({\mathrm{N/m^2}}\) (\(\fallingdotseq 0.1p_c\) mm water head), it is considered that there is no problem in the use of the sensor if the sensor satisfies \(\hbox {RMSE}\times C_f\le p_c\) \({\mathrm{N/m^2}}\) in the calibration test. From Figs. 7, 9, 11 and 13, it can be read as \(\hbox {RMSE}\le 5.0\) and \(C_f\fallingdotseq 1.0\) for the case of the strain-type pressure sensor. Therefore, the acceptable value is \(p_c\fallingdotseq 5.0\) (\(\fallingdotseq 0.5\) mm water head). As for ver. 6, the calibration coefficient is \(C_f\le 2.0\) in \(|\varDelta T|\le 1.0\) \(^\circ\)C, and the RMSE is around 5.0 \({\mathrm{N/m^2}}\). From these values, the acceptable value \(p_c\) is about 10.0 \({\mathrm{N/m^2}}\) (\(\fallingdotseq 1\) mm water head). This level is considered to be an acceptable range for practical use, but if \(|\varDelta T|\) is large, the value of \(C_f\) becomes large and the \(p_c\) value becomes unacceptable. The temperature difference band of ver. 7, which has the same \(p_c\) value as \(|\varDelta T|\le 1.0\) \(^\circ\)C of ver. 6, is about \(|\varDelta T|\le 3.0\) \(^\circ\)C (\(\hbox {RMSE}\le 8.0\), \(C_f\le 1.2\), \(p_c=9.6\fallingdotseq 10.0\)), and it can be seen that the acceptable temperature difference band widens considerably. Thus, with the values of \(C_f\) and RMSE calculated using outputs from the calibration test, it can be concluded that ver. 7 has significantly improved in terms of temperature interference for both RCS-U and RBC-U.

RMSE for the strain-type pressure sensor and the FBG pressure sensors, ver. 6 and ver. 7, obtained for RCS-U (\(N=13\))

Some examples of calibration results a–f that are illustrated in Fig.11

RMSE for the strain-type pressure sensor and the FBG pressure sensors, ver. 6 and ver. 7, obtained for RBC-U (\(N=10\))

Some examples of calibration results g–k that are illustrated in Fig.13

Sectional steady and unsteady pressures measured by the strain-type pressure sensor and the FBG pressure sensors, ver. 6 and ver. 7 (RCS-U: at ord.=8.5 for \(F_n=0.25\), \(\lambda /L=0.9\), and RBC-U: at ord.=9.0 for \(F_n=0.18\), \(\lambda /L=1.25\))
4.2 Results and discussion for steady and unsteady pressures
To investigate the performance of ver. 7 in the towing tank test, the measured steady and unsteady pressures on the hull surface in a transverse section are discussed here.
The pressures measured by the strain-type pressure sensor, ver. 6 and ver. 7, in the towing tank test are first transformed to the gauge pressures by adding the hydrostatic pressure if the sensors are placed below the still water line when the zero-state is set. The gauge pressures obtained are subsequently expanded into a Fourier series and separated into the steady pressure \(P_s\) and the time-variant unsteady pressure \(P_u\), and the latter, unsteady pressure \(P_u\), is expressed by decomposing its first-order term into the amplitude and phase (see reference [24] for details). The steady pressure \(P_s\) is indicated in the corrected pressure \(P_s'\) defined by
where \(\rho\) is the water density and g is the gravitational acceleration. The coordinate system moving forward at constant velocity with the ship is defined as \(o-xyz\), in which the bow direction is positive on the x axis. The body-fixed coordinate system in which the bow direction is defined as \(\bar{x}\) is given as \(\bar{o}-\bar{x}\bar{y}\bar{z}\). The coordinates z and \(\bar{z}\) are positive vertically upwards and the origins are taken at the center of the draft plane of the midship. Further, \(X_{s3}\) and \(X_{s5}\) denote the sinkage and trim, respectively, which are measured in the towing test in waves. The corrected steady pressure \(P_s'\) and unsteady pressure \(P_u\) are given as dimensionless values by dividing with \(\rho U^2/2\) (U: ship speed) and \(\rho g A\) (A: incident wave amplitude), respectively.
The steady and unsteady pressures are shown in Fig. 15, which were measured by the strain-type pressure sensors, the ver. 6 sensor, and the ver. 7 sensor, in each experiment conducted with RCS-U in September 2020 and RBC-U in December 2021. In Fig. 15(a-1) and (a-2) show the results for RCS-U, and (b-1) and (b-2) the results for RBC-U. Figures (a-1) and (b-1) were obtained for \(|\varDelta T|\le 5\) \(^\circ\)C , and figures (a-2) and (b-2) for \(|\varDelta T|\le 2\) \(^\circ\)C. Figure 15 shows the average values and standard deviations calculated from the measured data for sample sizes \(N=15,\,5,\,10,\,3\) from the left. The upper row of graphs shows the steady pressure, the middle row shows the amplitude of the unsteady pressure, and the lower row shows the phase difference of the unsteady pressure based on the time when the crest of the incident wave comes to the midship.
The resonance in the heave motion of RCS-U exists around \(\lambda /L=1.2\), and that of the pitch motion around \(\lambda /L=1.6\). The wavelength \(\lambda /L=0.9\) shown in Fig. 15(a-1) and (a-2) is shorter than the resonance wavelength, and the motion amplitude is not as large (the heave motion amplitude is 0.3 times the incident wave amplitude, and the pitch motion amplitude is about 0.35 times the maximum wave slope of the incident wave). As a result, the amplitude of the unsteady pressure is also small. On the other hand, the resonance wavelength in the heave motion of RBC-U is near \(\lambda /L=1.25\), and that of the pitch motion is around \(\lambda /L=1.6\). Therefore, the wavelength \(\lambda /L=1.25\) shown in Fig. 15(b-1) and (b-2) matches the resonance of heave. As a result, the heave motion amplitude is large (the heave motion amplitude is 1.25 times the incident wave amplitude, the pitch motion amplitude is about 0.95 times the maximum wave slope of the incident wave), and the unsteady pressure amplitude is also large. Consequently, the unsteady pressure amplitude for RBC-U is larger than that for RCS-U.
The results shown in Fig. 15(a-1) in \(|\varDelta T|\le 5\) \(^{\circ }\)C illustrate that the strain-type pressure sensors show much smaller standard deviations in both steady and unsteady pressures. The individual differences are also acceptably small. The temperature interference effect on the strain-type pressure sensors is almost negligible. Ver. 7 is slightly inferior to the strain-type pressure sensor in both steady pressures and unsteady pressures, but the variation in measured values is much smaller than those for ver. 6. The variations of measured values using ver. 6 are very large, and many sensors have average values that also deviate from the value of the strain-type pressure sensor. In addition, in the results for \(|\varDelta T|\le 2\) \(^\circ\)C shown in (a-2), the overall variation in the measured values using ver. 7 is even smaller than that in (a-1). Although the standard deviations of measured values from ver. 6 are smaller than those in Fig. 15(a-1), the average values are still slightly different from the strain-type pressure sensor. In this experiment, using RCS-U, the pressure and shipside wave are measured at the same time, and a capacitance shield wire is attached along the cross section to measure the shipside wave. Since the attaching position was located just in front of the FBG pressure sensor, there is a possibility that its influence is mixed in apart from temperature interference.
For the RBC-U, similar features can be discussed from Fig. 15(b-1) and (b-2). Note that the amplitude of unsteady pressure is larger than that in RCS-U, as the measured \(\lambda /L\) is close to the resonance of the heave motion. The standard deviation of ver. 7 at \(\theta =15\) deg in (b-1) and (b-2) is particularly large compared with the other sensors of ver. 7. This is because the sensor has a large RMSE and poor linearity, as was confirmed in Fig. 13.
In the results shown in Fig. 15, the average values of the steady pressure measured with ver. 6 and ver. 7 are slightly different from those from the strain-type pressure sensor. This is thought to be caused by the thickness of the FBG pressure sensor itself. Regarding the phase component of the unsteady pressure, no significant difference is seen between the results of the strain-type pressure sensor and the ver. 6 and ver. 7 sensors, and hence, it can be said that there is almost no influence of temperature interference on the phase.

Calibration coefficients \(C_f\) for the strain-type and FBG pressure sensors, ver. 6 and ver. 7, obtained for RBC-CW (\(N=12\))

Averages and standard deviations for the calibration coefficients \(C_f\) obtained for RBC-CW (\(+0.5\,^\circ \hbox {C}\le \varDelta T\le +6.0\,^\circ \hbox {C}\), \(N=12\))

RMSE for the strain-type and FBG pressure sensors, ver. 6 and ver. 7, obtained for RBC-CW (\(N=12\))

Some examples of calibration results (l) to (n) that are illustrated in Fig.18
From investigating the performance of ver. 7 from the viewpoint of pressure distribution in regular head waves using two types of hulls (i.e., RCS-U and RBC-U), it was confirmed that ver. 7 experienced a smaller effect of temperature interference than did ver. 6 and is therefore an improved pressure sensor. Provided that \(|\varDelta T|\le 2\) \(^\circ\)C, the average values of the amplitudes of the unsteady pressures measured with ver. 7 are almost the same as those of the strain-type pressure sensor, and the standard deviations are acceptably small. Practically, ver. 7 appears to be usable even in the temperature difference band of \(|\varDelta T|\le 5\) \(^\circ\)C. On the other hand, for ver. 6, even the temperature difference band of \(|\varDelta T|\le 2\) \(^\circ\)C is not practical, depending on the sensor measurement accuracy. This is the reason why the use of ver. 6 has been recommended only in the temperature difference band of \(|\varDelta T|\le 1\) \(^\circ\)C [23, 24]. Therefore, when conducting experiments in the summer using the towing tank of RIAM, Kyushu University, which is affected significantly by the outside air temperature because of the low roof, it was necessary to measure the pressure from midnight to early morning. It is expected that ver. 7 will eliminate this inconvenience and improve the measurement efficiency hereafter.
5 Performance evaluation of ver. 7 on a chemical wood model (RBC-CW)
Because the FBG pressure sensor is used by attaching the pressure-sensitive part to the ship model with double-sided tape, the pressure-sensitive part is in contact with the surface of the ship model via the double-sided tape. On the other hand, the temperature-sensitive part is slightly separated from the surface of the ship model by the thickness of the double-sided tape. For this different thermal environment, when the pressure-sensitive part receives heat transfer from the inside of the ship model, there is a possibility that the pressure cannot be measured correctly because of thermal deformation, which cannot be corrected by the temperature compensation of the temperature-sensitive part. Accordingly, we manufactured a ship model with chemical wood whose thermal conductivity is about 10 times larger than that of rigid polyurethane foam. Using this model, we investigated how the difference in model material (thermal conductivity) affects the pressure measurements of the FBG pressure sensor. Here, the thermal conductivity of rigid polyurethane foam is about 0.02–0.03W/(mK).
5.1 Calibration results and discussion
The results of \(C_f\) obtained from the strain-type pressure sensor, ver. 6, and ver. 7 in September 2021 with the chemical wood model (RBC-CW) are shown in Figs. 16 and 17 in the same manner as Figs. 9 and 10, respectively. The results were obtained using measured data (\(N=12\)) in the temperature difference band \(+0.5\,^\circ \hbox {C}\le \varDelta T\le +6.0\,^\circ \hbox {C}\). Because an abnormality was found in the output of ver. 7 at \(\theta =45\) deg, that measurement was excluded from the results.
In Fig. 16, the strain-type pressure sensors show \(C_f\fallingdotseq 1.0\) regardless of the temperature difference. The same results apply to Figs. 9 and 10. Figure 17 also shows that the standard deviations and individual differences of strain-type pressure sensors are generally the smallest among the three types of sensors. As described in Sect. 3, since the main body of the strain-type pressure sensors is screwed through a socket embedded in the model, the sensor part does not touch the model directly. It is therefore considered to be less affected by the model material.
As for ver. 6, there are individual differences depending on the sensor, as shown in Fig. 9, and most of \(C_f\) shows 1.0–2.0. If \(C_f\) is greater than 1.0, it means that the output is lower than at the time of the in-lab calibration test before product delivery. One possible cause for this is that the rigidity of the sensor is insufficient to counter the force from the double-sided tape used to attach the sensor.
On the other hand, looking at Fig. 17 for ver. 7, the standard deviations are not as small as the strain-type pressure sensor, but are smaller than the overall tendency for ver. 6. However, the standard deviations for ver. 6 and ver. 7 are larger than the corresponding results for RBC-U in Fig. 10. From the viewpoint of \(C_f\) obtained in the calibration test, the rigid polyurethane foam model with high heat insulation experiences smaller effects from temperature interference.
Figure 18 shows the RMSE results, and Fig. 19 illustrates a few examples of output results from the calibration test, which are indicated in Fig. 18. For ver. 6, in \(\varDelta T>1.0\) \(^\circ\)C, the hysteresis and zero drift appear together as in (l) to (n), and the value of \(C_f\) is also larger than 1.0 owing to output reduction. Also, the value of RMSE is overall larger than in Fig. 13, which is the result for RBC-U. For ver. 7, the RMSE is smaller than that for ver. 6, but tends to be larger than in Fig. 13. The differences between the results of RBC-U and RBC-CW will be discussed in the last subsection.
Summarizing these results, we can state that ver. 7 is not superior to the strain-type pressure sensor in terms of robustness to temperature differences, but its stability is much improved compared with that of ver. 6, even for RBC-CW.
5.2 Results and discussion related to steady and unsteady pressures
Figure 20 shows the steady and unsteady pressures measured by the strain-type pressure sensor, ver. 6, and ver. 7, in the experiment using RBC-CW in September 2021. The pressure is illustrated with the average values and standard deviations. Figure 20 (a) is the result for \(|\varDelta T|\le 6\) \(^\circ\)C, and (b) is for \(|\varDelta T|\le 2\) \(^\circ\)C. The sample sizes are \(N=16,\,6\) respectively.

Sectional steady and unsteady pressures measured with the strain-type and FBG pressure sensors, ver. 6 and ver. 7 (RBC-CW: at ord.=9.0 for \(F_n=0.18\), \(\lambda /L=1.25\))
Similar to the results of RBC-U in Fig. 15 (b-1) and (b-2), the results of the strain-type pressure sensor are acceptable with little influence from temperature interference. Considering (a) and (b) for ver. 7, the standard deviations are generally smaller than those for ver. 6, even though ver. 7 is inferior to the strain-type pressure sensor. The average values are close to the values of the strain-type pressure sensor. Comparing the results of RBC-U in Fig. 15 (b-2) with those of RBC-CW in Fig.20b, which have the same temperature difference band, the average values are not significantly different but the standard deviations are slightly smaller in the former. This point will be explained in detail in the next subsection.
Regarding the steady pressure, there is a discrepancy with the strain-type pressure sensor. This is considered to be due to the thickness of the FBG pressure sensor, similar to the results of RBC-U in Fig. 15(b-1) and (b-2). To obtain the steady pressure with the same accuracy as that from the strain-type pressure sensor using the FBG pressure sensor, it is necessary to use a larger ship model than the \(L_{pp}=2.4\) m model used in these experiments.
5.3 Evaluation of different materials used for ship models
In this section, the effects of different materials used for the ship model on the pressure measurement accuracy using the FBG pressure sensor are confirmed using the measurement results of the rigid polyurethane foam model RBC-U and the chemical wood model RBC-CW. Only the measurement data for the temperature difference bands of \(+1.5\,^\circ \hbox {C}\le \varDelta T\le +4.8\,^\circ \hbox {C}\) for RBC-CW and \(+1.5\,^\circ \hbox {C}\le \varDelta T\le +4 .6\,^\circ \hbox {C}\) for RBC-U were extracted and analyzed, so the temperature difference bands are almost the same for both results. In these bands, the sample sizes are \(N=13\) and 6, respectively.
Using the data from these temperature difference bands, the average values of the standard deviations of the steady and unsteady pressures of ver. 6 and ver. 7 were calculated. First, using the above temperature difference band data, the average values and standard deviations of the steady and unsteady pressures for each sensor were calculated in the same way as those for Figs. 15 (b-1) &(b-2) and 20, and finally, the average value of the standard deviations for each sensor was calculated. For RBC-U, the sensor, mentioned in Sect. 4.1, at the \(\theta =15\) deg position of ver. 7 is regarded as a defective sensor and was not used in the calculations.
Table 3 shows the results of the average values of the standard deviations for the steady and unsteady pressure amplitudes obtained from the analysis. These values are dimensionless, and the table also shows the results of the strain-type pressure sensor for reference. It can be seen from the table that the FBG pressure sensors ver. 6 and ver. 7, combined with RBC-U, show smaller standard deviations in steady and unsteady pressures compared with those with RBC-CW.
As noted at the beginning of Sect. 5, the pressure-sensitive part touches the model surface via the double-sided tape when the FBG pressure sensor is attached to the ship model. On the other hand, the temperature sensitive part has a small gap corresponding to the thickness of the double-sided tape, from the surface of the ship model. In other words, the temperature-sensitive part is only in contact with water. Therefore, the pressure-sensitive part can be affected by both water temperature and air temperature owing to heat transfer from the inside of the ship model in contact with the air, while the temperature-sensitive part is only affected by the water temperature. Since the rigid polyurethane foam has higher heat-insulating properties than does the chemical wood, it is considered that the pressure-sensitive part is not greatly affected by the heat transfer of the air temperature from the inside of the model, and that the temperature compensation for the temperature-sensitive part is performed correctly.

Sectional steady and unsteady pressures measured with the strain-type and FBG pressure sensors, ver. 6 and ver. 7. The radius of symbols indicates the average of the standard deviations (RBC-U/CW: at ord.=9.0 for \(F_n=0.18\), \(\lambda /L=1.25\))
In Fig. 21, the steady pressures and the amplitudes of the unsteady pressures obtained from the strain-type pressure sensors, ver. 6, and ver. 7 are plotted with circles. The center point of the circle indicates the average value of each sensor, and the radius indicates the average value of the standard deviations; that is, the degree of variation in the measured value. From the figure, it can be visually confirmed that the rigid polyurethane foam model leads to smaller variations than does the chemical wood model for both ver. 6 and ver. 7. Thus, the temperature interference effects from \(\varDelta T\) are smaller when a rigid polyurethane foam model is used. In particular, when ver. 7 is used in a model made of rigid polyurethane foam, it is possible to acquire measurement data that are not much different in variation from those of a strain-type pressure sensor.
Comparing (a) and (b) of Fig. 21, differences in the steady and unsteady pressures measured by the strain-type pressure sensor are observed. As mentioned above, the sensor part of the strain-type pressure sensor is not directly in contact with the ship model. Thus, it is conjectured that this is due to the following two factors, rather than the temperature interference. The first factor is a slight difference in the degree of embedding depth of the pressure-sensitive part of the sensor from the model surface (the diaphragm diameter is about 5 mm, and the sensor holder diameter is 8 mm). The second factor involves variations related to the repeatability of the entire experiment.
Through the investigation in this section, it was shown that ver. 7 is superior to ver. 6 with respect to temperature interference effects, even with RBC-CW. It was also shown that the performance of the FBG pressure sensors was improved using RBC-U with higher adiabaticity.
6 Improvements in ver. 7
In this section, the contribution to the reduction of temperature interference by each of the three improvements implemented in ver. 7 is discussed to identify which is essential for the improved performance of ver. 7. For this purpose, three ver. 6 sensors were prepared with one of the three improvements each and named E01, E02, and E03. The details of the three improvements are described in Sect. 2.2. In this investigation, results for ver. 7 and E01/ E02/ E03 obtained from the calibration and towing tank tests were compared.
6.1 Comparison of standard deviations between ver. 7 and E01/ E02/ E03 in the calibration test
Table 4 shows the results of the standard deviations of \(C_f\) for ver. 7, E01, E02, and E03 obtained from the calibration test conducted using RBC-CW in September 2021. The temperature difference band used for obtaining the results was \(+0.5\,^\circ \hbox {C}\le \varDelta T\le +6.0\,^\circ \hbox {C}\) (i.e. the same conditions used in Fig. 17), and the sample size was \(N=12\). Although ver. 7 was also attached at the same position as E01, E02, and E03 (i.e. \(\theta =45,\,60,\,75\) deg), only the results at \(\theta =60, 75\) deg are shown because of an output abnormality found in the sensor of ver. 7 attached to \(\theta =45\) deg, as described in Sect. 5.1. Thus, for ver. 7, the standard deviations shown by the error bar in \(\theta =60,\,75\) deg in the bottom figure of Fig. 17 are shown in the table as a numerical value. ‘Ave.’ in the table indicates the average of standard deviations at \(\theta =60\) and 75 deg.

Sectional steady and unsteady pressures measured with the FBG pressure sensors ver. 7, E01, E02, and E03 (RBC-CW: at ord.=9.0 for \(F_n=0.18\), \(\lambda /L\)=1.25, \(+0.5\,^\circ \hbox {C}\le \varDelta T\le +5.7\,^\circ \hbox {C}\), \(N=16\))

Sectional steady and unsteady pressures measured with the FBG pressure sensors ver. 7, E01, E02, and E03 (RBC-CW: at ord.=9.0 for \(F_n=0.18\), \(\lambda /L\)=1.25, \(+0.5\,^\circ \hbox {C}\le \varDelta T\le +1.9\,^\circ \hbox {C}\), \(N=6\))
As the rightmost column of the table shows, the ratios of each ‘Ave.’ for E01 and E02 to the ‘Ave.’ for ver. 7 are close to 1.0. This means that E01 and E02 have temperature interference characteristics similar to those of ver. 7. On the other hand, E03 shows ‘Ave.’ values three times larger than those for ver. 7, implying that it has not contributed to the temperature interference improvement. In the table, the standard deviation of \(C_f\) for ver. 7 is 0.15 at \(\theta =60\) deg. As can be seen from the figure of ver. 7 in Fig. 17, this value is larger than that of other ver. 7 sensors. This value increases the ‘Ave.’ value for ver. 7, as shown by the value of 0.1 in the table, and as a result, the ‘Ave.’ value for ver.7 is larger than those for E01 and E02. This is understood to mean that the ver. 7 sensor for \(\theta =60\) deg had a large standard deviation of \(C_f\).
6.2 Comparison of steady and unsteady pressures between ver. 7 and E01/ E02/ E03
The average values and standard deviations of the steady and unsteady pressures obtained by ver. 7, E01, E02, and E03 with RBC-CW in September 2021 are shown in Fig. 22. The temperature difference band used in the analysis was \(+0.5\,^\circ \hbox {C}\le \varDelta T\le +5.7\,^\circ \hbox {C}\), and the sample size was \(N=16\). In addition, Fig. 23 shows the results of the same analysis by extracting only the measurement data with a narrower temperature difference band \(+0.5\,^\circ \hbox {C}\le \varDelta T\le +1.9\,^\circ \hbox {C}\). The sample size in this case was \(N=6\).
Comparing the measurement results of each sensor in Figs. 22 and 23, it can be seen that E01 and E02 show values close to the average values of ver. 7 for both the steady and unsteady pressure amplitudes, and the standard deviations are about the same or slightly larger. On the other hand, the average values of the steady and unsteady pressure amplitudes of E03 do not match those of ver.7, and the standard deviations are also large. From this, as well as from the results of the calibration tests in the previous subsection, it can be concluded that the improvements applied to E01 and E02 are effective for temperature interference reduction.
In E01, the rigidity of the ring frame is increased by approximately 40 percent compared with ver. 6. This modification resulted in the sensor being less influenced by forces acting from the double-sided tape, while the nonuniform expansion deformation due to temperature changes in the pressure-sensitive part could be reduced. In E02, a thin stainless steel sheet is installed on the inner surface of the diaphragm. Before the improvement, the materials that the FBG touched were polyimide and metal, but after the improvement, it was only metal. It is considered that this change brought the heat transfer characteristics of the pressure- and temperature-sensitive parts closer to each other, and the temperature compensation could be performed accurately. As a synergistic effect of the above two improvements, it is considered that ver. 7 is more stable than is ver. 6 in respect to temperature interference. The knowledge obtained here could be expected to serve as a guide for further improvements of the FBG pressure sensor in the future.
7 Conclusions
In this study, we investigated the temperature interference effects of the latest FBG pressure sensor, version 7 (ps1000-v7, CMIWS Co., Ltd.). The performance of version 7 was evaluated through calibration and towing tank tests by comparing the test results with those of the conventional FBG pressure sensor, version 6 (ps1000-v6, CMIWS Co., Ltd.), and a strain-type pressure sensor (SHVR-50k for 50kPa, NTL). In these tests, two ship models, the RCS-U (Research Initiative of Oceangoing Ships, container ship made of rigid polyurethane foam) and the RBC-U (RIOS bulk carrier made of rigid polyurethane foam) were used. In addition, the effects of the ship model materials on temperature interference on the FBG pressure sensor were investigated through comparisons of the pressure behaviors obtained for RBC-U and RBC-CW (RIOS bulk carrier made of chemical wood). Finally, to identify which of the three improvements implemented in version 7 contributed to the reduction of temperature interference, a comparison was made between version 7 and the sensors, E01, E02, and E03, each with one of the three improvements. The conclusions obtained from these studies are summarized as follows:
-
(1)
It was confirmed by all the tests using RCS-U, RBC-U, and RBC-CW that the version 7 FBG pressure sensor was significantly improved in respect to temperature interference effects compared with the version 6 sensor. When using version 6, the pressure measurement must be done under the condition that the temperature difference between water and air, \(\varDelta T\), is \(|\varDelta T|\le 1.0\) \(^\circ\)C. However, using version 7, it is possible to measure pressure under the condition of \(|\varDelta T|\le 5.0\) \(^\circ\)C. As a result, it is expected that efficiency in the pressure measurement can be improved hereafter. Under this condition, the unsteady pressure can be measured with almost the same accuracy as that with a strain-type pressure sensor.
-
(2)
Even with the FBG pressure sensor version 7, the measurement accuracy of steady pressures is not as good as that of the strain-type pressure sensor. The main cause of this problem is the thickness of the sensor. It is necessary to use a ship model that is relatively large compared with the sensor dimensions.
-
(3)
The effects of temperature interference on the FBG pressure sensors depend on the material of the ship model. It is recommended that a material with low thermal conductivity is used to reduce the temperature interference effects because the performance of the FBG pressure sensors showed better results on RBC-U, which has a higher adiabaticity compared with RBC-CW.
-
(4)
The reduction of temperature interference confirmed for the FBG pressure sensor version 7 resulted from increasing the rigidity of the sensor ring frame and installing a stainless steel sheet to the sensor diaphragm. On the other hand, the adoption of glass soldering at the pressure-sensitive part did not significantly contribute to the improvement of temperature interference effects.
Data availability
The data used for illustrating the results of this study are openly available in Osaka University Knowledge Archive at https://doi.org/10.18910/90000.
References
Tasai F, Takaki M (1969) Theory and calculations of ship response in regular waves. Japan Society of Naval Architecture, Symposium on seaworthiness of ships (in Japanese)
Salvesen N, Tuck EO, Faltinsen OM (1970) Ship motions and sea loads. Trans Soc Naval Archit Mar Eng 78:250–287
Kim KH, Kim Y (2011) Numerical study on added resistance of ships by using a time-domain Rankine panel method. Ocean Eng 38(13):1357–1367
Yasuda E, Iwashita H, Kashiwagi M (2016) Improvement of Rankine panel method for seakeeping prediction of a ship in low frequency region, Proc of 35th International Conference on Ocean. Offshore and Arctic Engineering, OMAE-2016, Paper Number: OMAE2016-54163
Chen XB, Liang H, Li RP, Feng XY (2018) Ship seakeeping hydrodynamics by multi-domain method. Proc of 32nd Symposium on Naval hydrodynamics
Kashiwagi M (2020) Enhanced unified theory with forward-speed effect taken into account in the inner free-surface condition. J Ship Res 66:1–14
Kim M, Hizir O, Turan O, Incecik A (2017) Numerical studies on added resistance and motions of KVLCC2 in head seas for various ship speeds. Ocean Eng 140:466–476
Gong J, Yan S, Ma Q, Li Y (2020) Added resistance and seakeeping performance of trimarans in oblique waves. Ocean Eng 216:107721
Shivachev E, Khorasanchi M, Day S, Turan O (2020) Impact of trim on added resistance of KRISO Container Ship (KCS) in head waves - an experimental and numerical study. Ocean Eng 211:107594
Jialong J, Songxing H, Carlos GS (2021) Numerical investigation of ship motions in cross waves using CFD. Ocean Eng 223:108711
Iwashita H, Ito A, Okada T, Ohkusu M, Takaki M, Mizokuchi S (1993) Wave forces acting on a blunt ship with forward speed. J Soc Naval Archit Jpn 173:195–208 ((in Japanese))
Kashiwagi M, Mizokami S, Yasukawa H, Fukushima Y (2000) Prediction of wave pressure and loads on actual ships by the enhanced unified theory. Proc of the 23rd Symposium on Naval Hydrodynamics, p 368–384
Gregory JW, Asai K, Kameda M, Liu T, Sullivan JP (2008) A review of pressure-sensitive paint for high-speed and unsteady aerodynamics. Proc Inst Mech Eng, Part G: J AerospEng 222(2):249–290
Wakahara M, Nakajima M, Fukasawa T (2008) Development of an affix-type multi-point pressure sensor of FBG - 1st report (Pressure measurement system and performance). J Jpn Soc Naval Archit Ocean Eng 7:1–7 ((in Japanese))
Wakahara M, Tanigami A, Shingo S, Nakajima M, Fukasawa T, Kanai K (2008) Development of an affix-type multipoint pressure sensor by use of FBG - 2nd report (Multipoint pressure measurements on the surface of model ship on resistance test). J Jpn Soc Naval Archit Ocean Eng 7:9–14 ((in Japanese))
Iwashita H, Kashiwagi M (2018) An innovative EFD for studying ship seakeeping. Proc of 33rd IWWWFB, p 85–88
Fukushima H, Wakahara M, Kanai T (2019) Hull surface pressure measurement of the affix-type multipoint pressure sensor using Fiber Bragg Gratings. Proc of Practical Design of Ships and Other Floating Structures, p 368–383
Kashiwagi M, Iwashita H, Seki Y, Yoshida J, Ito Y, Katano A, Ohnishi H, Wakahara M (2017) Measurement of wave-induced unsteady pressure distribution on ship-hull surface using FBG sensors. Conference Proc of the Japan Society of Naval Architects and Ocean Engineers 24:613–616 (in Japanese)
Miura S, Kashiwagi M (2018) Unsteady pressure distribution on ship-hull surface measured by FBG pressure sensors and computed by Rankine panel method. Proc of 8th PAAMES and AMEC 2018:441–447
Suzuki K, Kashiwagi M, Iwashita H (2021) Effects of homogeneous solution in enhanced unified theory on pressure computation around ship bow. Proc of 31st International Offshore and Polar Engineering Conference, p 2807-2814
Yang KK, Kim BS, Kim Y, Kashiwagi M, Iwashita H (2021) Numerical study on unsteady pressure distribution on bulk carrier in head waves with forward speed. Processes 9(1):171
Kashiwagi M, Iwashita H, Miura S, Hinatsu M (2019) Study on added resistance with measured unsteady pressure distribution on ship-hull surface. Proc of 34th IWWWFB, p 81–84
Iwashita H (2020) Innovative measurement of unsteady pressure distribution on ship-hull surface and its use for hydrodynamic study on seakeeping. Invited-Speaker Lecture No. 4, The 33rd Symposium on Naval Hydrodynamics
Kurniawan TW, Kashiwagi M, Iwashita H, Hinatsu M (2020) Prediction of nonlinear vertical bending moment using measured pressure distribution on ship hull. Appl Ocean Res 101:102261
Research Initiative of Oceangoing Ships (2022) http://www.rios.eng.osaka-u.ac.jp/. Accessed 30 Apr 2022
Iwashita H, Kashiwagi M, Ito Y, Seki Y (2016) Calculations of ship seakeeping in low-speed/low-frequency range by frequency-domain Rankine panel methods. J Jpn Soc Naval Archit Ocean Eng 24:129–146 ((in Japanese))
Acknowledgements
This experimental work was supported in part by the Collaborative Research Program of the Research Institute for Applied Mechanics (RIAM), Kyushu University (Research subject No.: 2021ME-3). The authors are indebted to this support and assistance provided by Prof. Changhong Hu of RIAM. The present work was also partially supported by JSPS Grant-in-Aid for Scientific Research (B), Grant No. 21H01547. Additionally, the experimental data were obtained with the support of Mr. Joushiro Noda (technician of RIAM), Mr. Tatsuya Kanbara, Mr. Kesuke Yagi, Mr. Ryusei Fukumitsu, Mr. Yusuke Ando, and Mr. Hiroki Yamasaki (Hiroshima University students), and Mr. Koki Morita, Mr. Yohei Konishi, and Mr. Kazuki Miura (Osaka University students). The authors would like to express our gratitude to these individuals for their cooperation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Suzuki, K., Iwashita, H., Kashiwagi, M. et al. Temperature interference in improved FBG pressure sensor for towing tank test. J Mar Sci Technol 28, 351–369 (2023). https://doi.org/10.1007/s00773-023-00925-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-023-00925-w