
Abstract
In this paper, a computational approach to investigate the feasibility of using Smart Timoshenko beam (STB) for underwater locomotion is presented. The main objective of the current study is to understand different thrust producing mechanisms, namely flapping and undulatory modes of locomotion and to identify the critical parameters, such as body length, flexural stiffness and tail beat frequency affecting the locomotion. The thrust for different modes of locomotion with a variation in Young’s modulus and moment of inertia for the STB has been calculated. The results will help improve the understanding of thrust generation in both flapping and undulatory modes which are essential in the design and development of the bio-inspired robotic systems for underwater locomotion.











Similar content being viewed by others

References
Cheng J-Y, Pedley TJ, Altringham JD (1998) A continuous dynamic beam model for swimming fish. Philos Trans R Soc B Biol Sci 353(1371):981–997
Govindarajan G, Sharma R, Palaniswamy A (2018) Development of a numerical approach for the prediction of thrust generated by a biomimetic propulsion system. Ships Offshore Struct 14(8):804–817. https://doi.org/10.1080/17445302.2018.1564539
Lejun C, Alper E (2013) Bio-inspired aquatic robotics by untethered piezohydroelastic actuation. Bioinspir Biomim 8(1):1–13
Lindsey CC (1978) Form, function and locomotory habits in fish. In: Hoar WS, Randall DJ (eds) Fish physiology, vol 7. Locomotion. Academic, New York, pp 1–100
Ghani O, Andrejs C, Jean-Claude B, Jean- Marc DM, Py Charlotte (2012) Twisting and buckling: a new undulation mechanism for artificial swimmers. Eur Phys J E 35:121. https://doi.org/10.1140/epje/i2012-12121-y
Francois N, On Shun P, LaiLai Z, Luca B, Eric L (2014) Rotational propulsion enabled by inertia. Eur Phys J E 37:60. https://doi.org/10.1140/epje/i2014-14060-y
Moon KK, Dong-H Y (2015) Dynamic modelling and active vibration control of a submerged rectangular plate equipped with piezoelectric sensors and actuators. J Fluids Struct 54:848–867
Goushcha O, Huseyin DA, Niell E, Yiannis A (2015) Energy harvesting prospects in turbulent boundary layers by using piezoelectric transduction. J Fluid Struct 54:823–847
Zakharova AP, Alexander ML, Pismen LM (2016) Flexible helical yarn swimmers. Eur Phys J E 39:87. https://doi.org/10.1140/epje/i2016-16087-4
Coral W, Rossi C, Curet OM (2015) Free vibration analysis of a robotic fish based on a continuous and non-uniform flexible backbone with distributed masses. Eur Phys J Spec Top 224(17):3379–3392
Van Rensburg NFJ, van der Merwe AJ (2006) Natural frequencies and modes of a Timoshenko beam. Wave Motion 44(1):58–69
Nesterenko VV (1993) A theory for transverse vibrations of a Timoshenko beam. PMM J Appl Math Mech 57(4):669–677
Daga A, Ganesan N, Shankar K (2009) Transient dynamic response of cantilever magneto–electro-elastic beam using finite elements. Int J Comput Methods Eng Sci Mech 10(3):173–185
Alvarado P V y (2007) Design of biomimetic compliant devices for locomotion in liquid environments, Ph.D. Thesis, Department of Ocean Engineering, Massachusetts Institute of Technology, Boston, MA, USA
Erturk A, Bilgen O, Fontenille M, Inman D J (2008) Piezoelectric energy harvesting from macro-fiber composites with an application to morphing-wing aircrafts. In: 19th International Conference of Adaptive Structures and Technologies 19(11):1311–1325
Erturk A, Inman DJ (2008) On mechanical modeling of cantilevered piezoelectric vibration energy harvesters. J Intell Mater Syst Struct 19(11):1311–1325
Bilgen O, Erturk A, Inman DJ (2010) Analytical and experimental characterization of macro-fiber composite actuated thin clamped-free unimorph benders. J Vib Acoust 132(5):51005
Huang C, Lin YY, Tang TA (2004) Study on the tip-deflection of a piezoelectric bimorph cantilever in the static state. J Micromech Microeng 14(4):530–534
Lighthill MJ (1960) Note on the swimming of slender fish. J Fluid Mech 9(2):305–317
Lighthill MJ (1969) Hydromechanics of aquatic animal propulsion. Annu Rev Fluid Mech 1:413–446
Lighthill MJ (1970) Aquatic animal propulsion of high hydromechanical efficiency. J Fluid Mech 44:265–301
Gray J, Hancock GJ (1955) The propulsion of sea-urchin spermatozoa. J Exp Biol 32(4):802–814
Nicole A, Sachit B, Maurizio P, Davide S (2015) Dynamics of animal systems. Eur Phys J Spec Top 224(17–18):3109–3117
Lauder GV, Du Tangorra JL, Li R, Youcef Z, Toumi K, Valdivia PAY (2015) Fish locomotion: biology and robotics of body and fin-based movements, robot fish—bio-inspired fishlike underwater robots. Springer, Beijing, China
Happel J, Brenner H (1981) Low Reynolds number hydrodynamics: with special applications to particulate media, series on mechanics of fluids and transport processes, vol 1. Springer, Berlin, p 553
Shahab S, Erturk A (2015) Unified electrohydroelastic investigation of underwater energy harvesting and dynamic actuation by incorporating Morison’s equation. In: Proceeding of SPIE active and passive smart structures and integrated systems 201594310C SPIE
Erturk A (2012) Assumed-modes modeling of piezoelectric energy harvesters: euler-Bernoulli, Rayleigh, and Timoshenko models with axial deformations. Comput Struct 106–107:214–227
Zhang Y, Liu G (2009) Wireless swimming microrobot: design, analysis, and experiments. J Dyn Syst Meas Control 131(1):11004
Toshio F, Atsushi K, Fumihito A, Matsuura H (1994) Mechanism and swimming experiment of micro mobile robot in water. In: Proceedings of IEEE International Conference of robotics and automation 1:814–819
Hills ZP (2010) Using macro-fiber composite actuators for aquatic locomotion. Virginia Polytechnic Institute and State University, Washington
Chowdhury AR, Xue W, Behera MR, Panda SK (2016) Hydrodynamics study of a BCF mode bioinspiredrobotic-fish underwater vehicle using Lighthill’s slender body model. J Mar Sci Technol 21(1):102–114. https://doi.org/10.1007/s00773-015-0335-0
Acknowledgements
Primarily, this research was supported by the internal research grants of IIT Madras, Chennai, India under research scheme: OE12D004. Finally, I thank my colleagues for helping me in the critical circumstance, Mr. Arvind, Dr. Marimuthu kannimuthu, Dr. Harinadh Gidituri
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix 1
Appendix 1
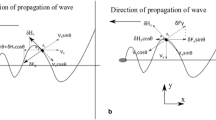
By using the convention and free body diagram from [2]. The Timoshenko beam model is the two-second order coupled partial differential equations of displacement and bending slope indicated. The dynamic equilibrium translation and rotation equations respectively
Where the internal moment force moment
The bending slope due to pure bending can be defined as
Where the translation equation of the equilibrium becames
where
\( \rho_{s} \) then of the substrate, \( t_{s} \) thickness of substrate, \( \rho_{p} \) density of piezeoelectric material, \( t_{p} \) thickness of piezeoelectric material.
About this article

Cite this article
Govindarajan, G. An investigation to identify the thrust in flapping and undulatory motion of smart Timoshenko beam. J Mar Sci Technol 25, 743–756 (2020). https://doi.org/10.1007/s00773-019-00677-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-019-00677-6