
Abstract
Hydrodynamic coefficients strongly affect the dynamic performance of autonomous underwater vehicles (AUVs). Thus it is important to have the true values of the coefficients in order to simulate the AUV’s dynamic performance accurately. Although these coefficients can be predicted by many methods, most are only applicable for AUVs with streamlined shapes. Computational fluid dynamics (CFD) can be applied to estimate the hydrodynamic coefficients of AUVs with complex shapes. In this study, CFD was applied to estimate the hydrodynamic coefficients of the AUV TUNA-SAND (which stands for terrain-based underwater navigable AUV for seafloor and natural resources development), which has a complex block-like structure. First, the validity of the CFD simulation was verified by comparison with experimental results. Second, the relationships between hydrodynamic loads and motions for all six degrees of freedom were analyzed using the simulated results. Third, the importance of each hydrodynamic coefficient was investigated based on these relationships. There are 16 key damping coefficients that relate to viscosity and 12 key inertial coefficients that relate to the potential flow around TUNA-SAND. Finally, the values of all the key coefficients were obtained and verified by comparing the solutions of the simulated dynamics with the experimental results.











Similar content being viewed by others

Abbreviations
- O-xyz :
-
Body-fixed frame
- E-XYZ :
-
Earth-fixed frame
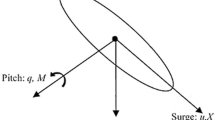
- X, Y, Z, L, M, N :
-
Surge, sway, and heave hydrodynamic forces, and roll, pitch, and yaw hydrodynamic moments
- X T, Y T, Z T, L T, M T, N T :
-
Surge, sway, and heave force, and roll, pitch and yaw moments provided by the thrusters
- u, v, w :
-
Surge, sway, and heave velocity
- p, q, r :
-
Roll, pitch and yaw angular velocity
- u′, v′, w′:
-
Surge, sway and heave acceleration
- p′, q′, r′:
-
Roll, pitch and yaw angular acceleration
- m :
-
Mass of the vehicle
- ρ:
-
Density of water
- ∇:
-
Drain volume of the vehicle
- z B :
-
Centre of buoyancy
- I x , I y and I z :
-
Moments of inertia
- Φ, Θ and Ψ:
-
Euler angles between Earth-fixed frame and the body-fixed frame
- X i , Y i , Z i , L i , M i , N i :
-
Hydrodynamic coefficients for surge, sway, heave, roll moment, pitch and yaw moment, e.g. \( X_{u|u|} = \partial X/\partial u|u| \)
- T :
-
Thrust
- n :
-
Rotational speed of thruster
- D :
-
Diameter of thruster
- V a :
-
Inlet flow velocity
- K T :
-
Thrust coefficient
- K 0 :
-
Thrust coefficient for J = 0, J = V a/nD
- Re :
-
Reynolds number
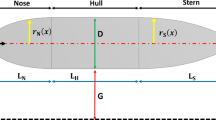
- L :
-
Length of body
- υ:
-
Kinematic viscosity of salt water at 15°C, ν = 1.19 × 10−6
- QRAS :
-
Quality and reliability assurance coefficient of grids, 0 ≤ Q RAS ≤ 1
- v :
-
Design speed
References
Ura T, Nakatani T, Nose Y (2006) Terrain-based localization method for wreck observation AUV. In: Proceedings of OCEANS, Boston, USA, 18–21 September 2006, pp 1–6
Suzuki H, Kato N, Katayama T, Fukui Y (2007) Motion simulation of an underwater vehicle with mechanical pectoral fins using a CFD-based motion simulator. In: Proceedings of the international symposium on underwater technology 2007, Tokyo, Japan, 17–20 April, pp 384–390
Perrault D, Bose N, O’Young S, Williams CD (2003) Sensitivity of AUV added mass coefficients to variations in hull and control plane geometry. Ocean Eng 30:654–671
Nakatani T, Ura T, Ito T et al (2008) AUV TUNA-SAND and its exploration of hydrothermal vents at Kagoshima Bay. In: Proceedings of OCEANS 2008, Kobe, Japan, 8–11 April, pp 1–5
Jiang X-S, Feng X-S, Wang D-T (2000) Hydrokinetics foundation of unmanned underwater vehicles. In: Unmanned underwater vehicles. Liao Ning Science and Technology, Liao Ning, China
Kim K (2003) Optimal guidance and tracking control of autonomous underwater vehicle under environmental disturbances. PhD Thesis, University of Tokyo, Tokyo
Strumpf A (1960) Equations of motion of a submerged body with varying mass. Stevens Institute of Technology Report SIT-DL-60-9-771. NY, USA
Sen D (2000) A study on sensitivity of manoeuvrability performance on the hydrodynamic coefficients for submerged bodies. J Ship Res 45(3):186–196
Aage C, Wagner L-S (1994) Hydrodynamic manoeuvrability data of a flatfish type AUV. In: Proceedings of OCEANS 1994, vol 3. Brest, 13–16 September, pp III/425–III/430
Yoon H-K, Son N-S, Lee C-M (2007) Estimation of the roll hydrodynamic moment model of a ship by using the system identification method and a free running model test. IEEE J Ocean Eng 32(4):798–806
Yoon H-K, Son N-S (2004) Estimation of roll-related coefficients of a ship by using the system identification method (in Korean). J Soc Naval Archit Korea 41(4):53–58
Jones DA, Clarke DB, Brayshaw IB et al (2002) The calculation of hydrodynamic coefficients for underwater vehicles. DSTO Platforms Sciences Laboratory, Fishermans Bend, Australia, Report. DSTO-TR-1329
Nahon M (1993) Determination of undersea vehicle hydrodynamic derivatives using the USAF DATCOM. In: Proceedings of OCEANS 1993, vol 2. Victoria, BC, pp 283–288
Humphreys D (1981) Dynamics and hydrodynamics of ocean vehicles, vol 13. In: Proceedings of OCEANS 1981, pp 88–91
Kim K, Kim J, Choi H-S et al (2002) Estimation of hydrodynamic coefficients of a test-bed AUV-SNUUV1 by motion test, vol 1. In: Proceedings of OCEANS 2002, 29–31 October 2002, pp 186–190
Kim J, Kim K, Choi H-S et al (2002) Estimation of hydrodynamic coefficients for an AUV using nonlinear observers. IEEE J Ocean Eng 27(4):830–840
Irwin R-P, Chauvet C (2007) Quantifying hydrodynamic coefficients of complex structures. In: Proceedings of OCEANS 2007, Aberdeen, UK, 18–21 June, pp 1–5
Lin F, Schohl GA (2004) CFD predication and validation of butterfly valve hydrodynamic forces. In: Proceedings of ASCE 2004, Utah, USA, 27 June–1 July, pp 1–8
Tyagi A, Sen D (2006) Calculation of transverse hydrodynamic coefficients using computational fluid dynamic approach. Ocean Eng 33(5–6):798–809
Acknowledgments
The authors acknowledge Dr. K. Kim for providing many useful suggestions for the boundary condition decision. We also thank all members of the URA Laboratory, the University of Tokyo, for their help with the experiments. This work is supported by National Natural Science Foundation of China (No. 40806019).
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Tang, S., Ura, T., Nakatani, T. et al. Estimation of the hydrodynamic coefficients of the complex-shaped autonomous underwater vehicle TUNA-SAND . J Mar Sci Technol 14, 373–386 (2009). https://doi.org/10.1007/s00773-009-0055-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-009-0055-4