
Abstract
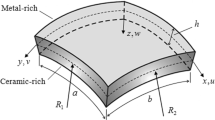
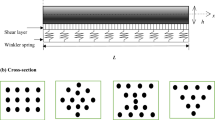
This article analyzes the nonlinear vibrations of porous truncated conical polyvinylidene fluoride (PVDF) reinforced with Terfenol-D particles. The effective properties of the magneto-electro-elastic composite have been obtained using the Eshelby–Mori–Tanaka model. Also, the porosity in the composite is considered uniform. The governing equation of the system is derived based on the von Karman theory of nonlinear strains and the theory of first-order shear deformation by applying the principle of minimum energy potential and Hamilton's principle. These equations are solved using the generalized differential quadrature method. The effect of porosity, vertex angle, shell length, boundary conditions, and volume fraction of Terfenol-D will be discussed. Also, for validation, the obtained results were compared with those found in the literature, which was a good answer, along with the accuracy. Results show that the nonlinear to linear natural frequency ratio has a decreasing trend at the lower vertex angle. The present findings can serve as a reference point for subsequent assessments.












Similar content being viewed by others
References
Sofiyev, A.: The non-linear vibration of FGM truncated conical shells. Compos. Struct. 94(7), 2237–2245 (2012)
Xu, C., Xia, Z., Chia, C.: Non-linear theory and vibration analysis of laminated truncated, thick, conical shells. Int. J. Non-Linear Mech. 31(2), 139–154 (1996)
Ebrahimi, F., Rastgoo, A.: Nonlinear vibration analysis of piezo-thermo-electrically actuated functionally graded circular plates. Arch. Appl. Mech. 81, 361–383 (2011)
Ghorbanpour Arani, A., et al.: Electro-thermo nonlocal nonlinear vibration in an embedded polymeric piezoelectric micro plate reinforced by DWBNNTs using DQM. J. Mech. Sci. Technol. 26, 3047–3057 (2012)
Hao, Y., et al.: Nonlinear vibrations of FGM circular conical panel under in-plane and transverse excitation. J. Vib. Eng. Technol. 6, 453–469 (2018)
Sofiyev, A., Kuruoglu, N.: Determination of the excitation frequencies of laminated orthotropic non-homogeneous conical shells. Compos. B Eng. 132, 151–160 (2018)
Ansari, R., Hasrati, E., Torabi, J.: Nonlinear vibration response of higher-order shear deformable FG-CNTRC conical shells. Compos. Struct. 222, 110906 (2019)
Yang, S., et al.: Nonlinear vibrations of FGM truncated conical shell under aerodynamics and in-plane force along meridian near internal resonances. Thin-Walled Struct. 142, 369–391 (2019)
Karimiasl, M., Ebrahimi, F., Vinyas, M.: Nonlinear vibration analysis of multiscale doubly curved piezoelectric composite shell in hygrothermal environment. J. Intell. Mater. Syst. Struct. 30(10), 1594–1609 (2019)
Bakhtiari, M., Lakis, A.A., Kerboua, Y.: Nonlinear vibration of truncated conical shells: Donnell, Sanders and Nemeth theories. Int. J. Nonlinear Sci. Numer. Simul. 21(1), 83–97 (2020)
Amabili, M., Balasubramanian, P.: Nonlinear vibrations of truncated conical shells considering multiple internal resonances. Nonlinear Dyn. 100(1), 77–93 (2020)
Moghaddam, S.M.F., Ahmadi, H.: Active vibration control of truncated conical shell under harmonic excitation using piezoelectric actuator. Thin-Walled Struct. 151, 106642 (2020)
Aris, H., Ahmadi, H.: Nonlinear vibration analysis of FGM truncated conical shells subjected to harmonic excitation in thermal environment. Mech. Res. Commun. 104, 103499 (2020)
Ebrahimi, F., Mahesh, V.: On nonlinear vibration of sandwiched polymer-CNT/GPL-fiber nanocomposite nanoshells. Thin-Walled Struct. 146, 106431 (2020)
Vuong, P.M., Duc, N.D.: Nonlinear vibration of FGM moderately thick toroidal shell segment within the framework of Reddy’s third order-shear deformation shell theory. Int. J. Mech. Mater. Des. 16, 245–264 (2020)
Ali, A.Y., Hasan, H.M.: Non-linear large amplitude vibration of orthotropic FGM convex and concave toroidal shell segments including the damping effect using the shear deformation theory. Thin-Walled Struct. 173, 109035 (2022)
Yang, S., et al.: Nonlinear vibration of functionally graded graphene platelet-reinforced composite truncated conical shell using first-order shear deformation theory. Appl. Math. Mech. 42(7), 981–998 (2021)
Mohammadrezazadeh, S., Jafari, A.A.: Nonlinear vibration analysis of laminated composite angle-ply cylindrical and conical shells. Compos. Struct. 255, 112867 (2021)
Aris, H. and H. Ahmadi, Nonlinear forced vibration and resonance analysis of rotating stiffened FGM truncated conical shells in a thermal environment. Mechanics Based Design of Structures and Machines, 2021: p. 1–25.
Parhi, A., Singh, B., Panda, S.K.: Nonlinear free vibration analysis of composite conical shell panel with cluster of delamination in hygrothermal environment. Eng. Comput. 37, 1565–1577 (2021)
Mirjavadi, S.S., et al.: Investigating nonlinear vibrations of multi-scale truncated conical shell segments with carbon nanotube/fiberglass reinforcement using a higher order conical shell theory. J. Strain Anal. Eng. Des. 56(3), 181–192 (2021)
Zhang, Y., Liu, W.: Nonlinear vibration response of a functionally graded carbon nanotube-reinforced composite conical shell using a stress function method. Acta Mech. 233(8), 3157–3174 (2022)
Vahidi, H., et al.: Nonlinear vibration, stability, and bifurcation of rotating axially moving conical shells. Acta Mech. 233(8), 3175–3196 (2022)
Kai, G., et al.: Transient and steady-state nonlinear vibrations of FGM truncated conical shell subjected to blast loads and transverse periodic load using post-difference method. Mech. Adv. Mater. Struct. pp. 1–19 (2022)
Mirjavadi, S.S., et al.: Analysis of nonlinear vibrations of CNT-/fiberglass-reinforced multi-scale truncated conical shell segments. Mech. Based Des. Struct. Mach. 50(6), 2067–2083 (2022)
Sheykhi, A., et al.: Free nonlinear vibration analysis of nano-truncated conical shells based on modified strain gradient theory. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 236(1), 110–146 (2022)
Zhang, Y.-W., et al.: Wave propagation of CNTRC beams resting on elastic foundation based on various higher-order beam theories. Geomech. Eng. 33(4), 381 (2023)
Mangalasseri, A.S., et al.: Vibration based energy harvesting performance of magnetoelectro-elastic beams reinforced with carbon nanotubes. Adv. Nano Res. 14(1), 27–43 (2023)
Huang, Y., et al.: Static stability analysis of carbon nanotube reinforced polymeric composite doubly curved micro-shell panels. Arch. Civil Mech. Eng. 21(4), 1–15 (2021)
Arshid, E., et al.: Porosity-dependent vibration analysis of FG microplates embedded by polymeric nanocomposite patches considering hygrothermal effect via an innovative plate theory. Eng. Comput. pp. 1–22 (2021)
Heidari, F., et al.: On the mechanics of nanocomposites reinforced by wavy/defected/aggregated nanotubes. Steel Composite Struct. Int. J. 38(5), 533–545 (2021)
Alimirzaei, S., Mohammadimehr, M., Tounsi, A.: Nonlinear analysis of viscoelastic micro-composite beam with geometrical imperfection using FEM: MSGT electro-magneto-elastic bending, buckling and vibration solutions. Struct. Eng. Mech. 71(5), 485–502 (2019)
Garg, A., et al.: Machine learning models for predicting the compressive strength of concrete containing nano silica. Comput. Concr. 30(1), 33 (2022)
Xia, L., et al.: The finite element method for dynamics of FG porous truncated conical panels reinforced with graphene platelets based on the 3-D elasticity. Adv. Nano Res. 14(4), 375–389 (2023)
Onuralp, Y., et al., Experimental tensile test and micro mechanic investigation on carbon nanotube reinforced carbon fiber composite beams. Adv. Nano Res, 2023. 14.
Quan, T.Q., Kim, S.-E., Duc, N.D.: Nonlinear dynamic response and vibration of shear deformable piezoelectric functionally graded truncated conical panel in thermal environments. Eur. J. Mech. A. Solids 77, 103795 (2019)
Van Thanh, N., Khoa, N.D., Duc, N.D.: Nonlinear dynamic analysis of piezoelectric functionally graded porous truncated conical panel in thermal environments. Thin-Walled Struct. 154, 106837 (2020)
Van Vinh, P., Van Chinh, N., Tounsi, A.: Static bending and buckling analysis of bi-directional functionally graded porous plates using an improved first-order shear deformation theory and FEM. Eur. J. Mech. A. Solids 96, 104743 (2022)
Kumar, Y., Gupta, A., Tounsi, A.: Size-dependent vibration response of porous graded nanostructure with FEM and nonlocal continuum model. Adv. Nano Res. 11(1), 001 (2021)
Cuong-Le, T., et al.: Nonlinear bending analysis of porous sigmoid FGM nanoplate via IGA and nonlocal strain gradient theory. Adv. Nano Res. 12(5), 441 (2022)
Katiyar, V., Gupta, A., Tounsi, A.: Microstructural/geometric imperfection sensitivity on the vibration response of geometrically discontinuous bi-directional functionally graded plates (2D FGPs) with partial supports by using FEM. Steel Composite Struct. Int. J. 45(5), 621–640 (2022)
Bellifa, H., et al.: Influence of porosity on thermal buckling behavior of functionally graded beams. Smart Struct. Syst. 27(4), 719–728 (2021)
Al-Osta, M.A., et al.: Influence of porosity on the hygro-thermo-mechanical bending response of an AFG ceramic-metal plates using an integral plate model. Smart Struct. Syst. Int. J. 28(4), 499–513 (2021)
Mesbah, A., et al.: Formulation and evaluation a finite element model for free vibration and buckling behaviours of functionally graded porous (FGP) beams. Struct. Eng. Mech. 86(3), 291 (2023)
Liu, G., et al.: Dynamics of imperfect inhomogeneous nanoplate with exponentially-varying properties resting on viscoelastic foundation. Eur. J. Mech. A/Solids 95, 104649 (2022)
Hadji, M., et al.: Combined influence of porosity and elastic foundation parameters on the bending behavior of advanced sandwich structures. Steel Compos. Struct. 46(1), 1 (2023)
Kolahchi, R., Ghorbanpour, A.A.: Nonlinear vibration and instability analysis of a PVDF cylindrical shell reinforced with BNNTS conveying viscose fluid using HDQ method. 2012.
Abediokhchi, J., Kouchakzadeh, M., Shakouri, M.: Buckling analysis of cross-ply laminated conical panels using GDQ method. Compos. B Eng. 55, 440–446 (2013)
Rabani Bidgoli, M., Saeed Karimi, M., Ghorbanpour Arani, A.: Nonlinear vibration and instability analysis of functionally graded CNT-reinforced cylindrical shells conveying viscous fluid resting on orthotropic Pasternak medium. Mech. Adv. Mater. Struct. 23(7), 819–831 (2016)
Nguyen Dinh, D., Nguyen, P.D.: The dynamic response and vibration of functionally graded carbon nanotube-reinforced composite (FG-CNTRC) truncated conical shells resting on elastic foundations. Materials 10(10), 1194 (2017)
Arani, A.G., Karimi, M.S., Bidgoli, M.R.: Nonlinear vibration and instability of rotating piezoelectric nanocomposite sandwich cylindrical shells containing axially flowing and rotating fluid–particle mixture. Polym. Compos. 38, E577–E596 (2017)
Sofiyev, A.: The stability analysis of shear deformable FGM sandwich conical shells under the axial load. Compos. Struct. 176, 803–811 (2017)
Ebrahimi, F., Heidari, E.: Surface effects on nonlinear vibration and buckling analysis of embedded FG nanoplates via refined HOSDPT in hygrothermal environment considering physical neutral surface position. Adv. Aircraft Spacecraft Sci. 5(6), 691 (2018)
Ahari, M.F., Ghadiri, M.: Resonator vibration of a magneto-electro-elastic nano-plate integrated with FGM layer subjected to the nano mass-Spring-damper system and a moving load. Waves Random Complex Media, 1–39 (2022).
Ebrahimi, F., Ahari, M.F.: Magnetostriction-assisted active control of the multi-layered nanoplates: effect of the porous functionally graded facesheets on the system’s behavior. Eng. Comput. 1–15 (2021).
Huang, J.H., Yu, J.: Electroelastic Eshelby tensors for an ellipsoidal piezoelectric inclusion. Compos. Eng. 4(11), 1169–1182 (1994)
Ebrahimi, F., Habibi, S.: Nonlinear eccentric low-velocity impact response of a polymer-carbon nanotube-fiber multiscale nanocomposite plate resting on elastic foundations in hygrothermal environments. Mech. Adv. Mater. Struct. 25(5), 425–438 (2018)
Wang, Y.Q., Zhao, H.L.: Free vibration analysis of metal foam core sandwich beams on elastic foundation using Chebyshev collocation method. Arch. Appl. Mech. 89, 2335–2349 (2019)
Wang, Q., Shao, D., Qin, B.: A simple first-order shear deformation shell theory for vibration analysis of composite laminated open cylindrical shells with general boundary conditions. Compos. Struct. 184, 211–232 (2018)
Ebrahimi, F., Ahari, M.F.: Mechanics of magnetostrictive materials and structures.
Ebrahimi, F., Farajzadeh Ahari, M.: Dynamic analysis of sandwich magnetostrictive nanoplates with a mass-spring-damper stimulator. Int. J. Struct. Stabil. Dyn. (2023)
Reddy, J.N.: Energy principles and variational methods in applied mechanics. Wiley, 2017.
Ebrahimi, F., Shafiee, M.-S., Ahari, M.F.: Buckling analysis of single and double-layer annular graphene sheets in thermal environment. Eng. Comput. 1–15 (2022)
Ebrahimi, F., Shafiei, M.-S., Ahari, M.F.: Vibration analysis of single and multi-walled circular graphene sheets in thermal environment using GDQM. Waves in Random and Complex Media 1–40 (2022).
Ebrahimi, F., Mollazeinal, A., Farajzadeh Ahari, M.: Active vibration control of truncated conical porous smart composite shells. Int. J. Struct. Stabil. Dyn. (2023)
Akbari, M., et al.: Free vibration of FGM Lévy conical panels. Compos. Struct. 116, 732–746 (2014)
Jalili, N.: Piezoelectric-based vibration control: from macro to micro/nano scale systems. Springer Science & Business Media (2009)
Asrari, R., et al.: Buckling analysis of heterogeneous magneto-electro-thermo-elastic cylindrical nanoshells based on nonlocal strain gradient elasticity theory. Mech. Based Des. Struct. Mach. 50(3), 1–24 (2020)
Rahimi, Y., et al.: Temperature-dependent vibrational behavior of bilayer doubly curved micro-nano liposome shell: Simulation of drug delivery mechanism. J. Thermal Stress. 1–28 (2023).
Mizuji, Z.K., et al.: Numerical modeling of a body vessel for dynamic study of a nano cylindrical shell carrying fluid and a moving nanoparticle. Eng. Anal. Boundary Elem. 152, 362–382 (2023)
Zhao, X., Liew, K.M.: Free vibration analysis of functionally graded conical shell panels by a meshless method. Compos. Struct. 93(2), 649–664 (2011)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest in preparing this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Relations related to the calculation of the Eshelby tensor:
Appendix B
The coefficients \(A_{ij}\), \(B_{ij}\), and \(D_{ij}\) are stretching, bending-stretching (coupling), and bending stiffness, respectively. Moreover, it can be expressed from the following relationships:
Also, the coefficients used in Eq. (46a–n) can be expressed as follows:
Appendix C
The following boundary conditions are also obtained:
-
Clamped boundary conditions:
-
Simply supported boundary condition:
$$ A_{11} \frac{\partial u}{{\partial x}} + B_{11} \frac{{\partial \varphi_{x} }}{\partial x} + A_{12} \frac{sin\alpha }{{a_{0} }}u + B_{12} \frac{sin\alpha }{{a_{0} }}\varphi_{x} = 0{ }\quad x = 0,\;x = L $$$$ B_{11} \frac{\partial u}{{\partial x}} + D_{11} \frac{{\partial \varphi_{x} }}{\partial x} + B_{12} \frac{sin\alpha }{{a_{0} }}u + D_{12} \frac{sin\alpha }{{a_{0} }}\varphi_{x} = 0 $$(50a)$$ A_{22} \frac{1}{r\left( x \right)}\frac{\partial v}{{\partial \theta }} + B_{22} \frac{1}{r\left( x \right)}\frac{{\partial \varphi_{\theta } }}{\partial \theta } = 0\quad {\uptheta } = 0,\theta = \theta_{0} $$$$ B_{22} \frac{1}{r\left( x \right)}\frac{\partial v}{{\partial \theta }} + D_{22} \frac{1}{r\left( x \right)}\frac{{\partial \varphi_{\theta } }}{\partial \theta } = 0 $$(51b)
Appendix D
The superscripts (1) and (2) in the weight coefficients of the above equations indicate the estimation of the first and second derivatives of the functions. In the following, it is used to convert the above equations into a matrix form by using the concept of double multiplication of Kronecker and Hadamard. By using these two types of multiplication, the nonlinear coupled equations are expressed as follows:
In the above equations, the superscript \(\left(\overleftrightarrow{}\right)\) represents the two-dimensional tensor, and the superscript \(\left(\overrightarrow{}\right)\) represents the one-dimensional tensor. Further, Eqs. (53a–f) can be expressed in the matrix form of the following nonlinear eigenvalue problem:
where \({\overleftrightarrow{K}}_{L}\) is the two-dimensional linear stiffness tensor, and \({\overleftrightarrow{K}}_{NL}\) is the two-dimensional nonlinear stiffness tensor which is a function of \(W\), and \(\overleftrightarrow{M}\) is the two-dimensional mass tensor that can be expressed as follows:
In order to apply the boundary conditions at the boundary points of the problem, the boundary conditions are expressed as follows:
where \(\overleftrightarrow{T}\) is expressed as follows:
-
Boundary conditions of the clamped at the edge x = 0:
$$ \mathop{T}\limits^{\leftrightarrow} _{11} = \left({\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\mathop{T}\limits^{\leftrightarrow} _{12} = \mathop{T}\limits^{\leftrightarrow} _{13} = \mathop{T}\limits^{\leftrightarrow} _{14} = \mathop{T}\limits^{\leftrightarrow} _{15} = \mathop{T}\limits^{\leftrightarrow} _{16} = \mathop{T}\limits^{\leftrightarrow} _{17} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{22} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{21} = \mathop{T}\limits^{\leftrightarrow} _{23} = \mathop{T}\limits^{\leftrightarrow} _{34} = \mathop{T}\limits^{\leftrightarrow} _{25} = \mathop{T}\limits^{\leftrightarrow} _{26} = \mathop{T}\limits^{\leftrightarrow} _{27} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{33} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{31} = \mathop{T}\limits^{\leftrightarrow} _{32} = \mathop{T}\limits^{\leftrightarrow} _{34} = \mathop{T}\limits^{\leftrightarrow} _{35} = \mathop{T}\limits^{\leftrightarrow} _{36} = \mathop{T}\limits^{\leftrightarrow} _{37} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{44} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{41} = \mathop{T}\limits^{\leftrightarrow} _{42} = \mathop{T}\limits^{\leftrightarrow} _{43} = \mathop{T}\limits^{\leftrightarrow} _{45} = \mathop{T}\limits^{\leftrightarrow} _{46} = \mathop{T}\limits^{\leftrightarrow} _{47} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{55} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{51} = \mathop{T}\limits^{\leftrightarrow} _{52} = \mathop{T}\limits^{\leftrightarrow} _{53} = \mathop{T}\limits^{\leftrightarrow} _{54} = \mathop{T}\limits^{\leftrightarrow} _{56} = \mathop{T}\limits^{\leftrightarrow} _{57} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{66} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{61} = \mathop{T}\limits^{\leftrightarrow} _{62} = \mathop{T}\limits^{\leftrightarrow} _{63} = \mathop{T}\limits^{\leftrightarrow} _{64} = \mathop{T}\limits^{\leftrightarrow} _{65} = \mathop{T}\limits^{\leftrightarrow} _{67} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{77} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{\theta }} \otimes \vec{I}_{1}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{71} = \mathop{T}\limits^{\leftrightarrow} _{72} = \mathop{T}\limits^{\leftrightarrow} _{73} = \mathop{T}\limits^{\leftrightarrow} _{74} = \mathop{T}\limits^{\leftrightarrow} _{75} = \mathop{T}\limits^{\leftrightarrow} _{76} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$(58)
-
Boundary conditions of the clamped at the edge θ = 0
$$ \mathop{T}\limits^{\leftrightarrow} _{81} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x} }}} \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{82} = \mathop{T}\limits^{\leftrightarrow} _{83} = \mathop{T}\limits^{\leftrightarrow} _{84} = \mathop{T}\limits^{\leftrightarrow} _{85} = \mathop{T}\limits^{\leftrightarrow} _{86} = \mathop{T}\limits^{\leftrightarrow} _{87} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x} }}} \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{92} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{91} = \mathop{T}\limits^{\leftrightarrow} _{93} = \mathop{T}\limits^{\leftrightarrow} _{94} = \mathop{T}\limits^{\leftrightarrow} _{95} = \mathop{T}\limits^{\leftrightarrow} _{96} = \mathop{T}\limits^{\leftrightarrow} _{97} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{x}}} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{103} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x} }}} \right),\quad { }\mathop{T}\limits^{\leftrightarrow} _{101} = \mathop{T}\limits^{\leftrightarrow} _{102} = \mathop{T}\limits^{\leftrightarrow} _{104} = \mathop{T}\limits^{\leftrightarrow} _{105} = \mathop{T}\limits^{\leftrightarrow} _{106} = \mathop{T}\limits^{\leftrightarrow} _{107} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{x}}} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{114} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{111} = \mathop{T}\limits^{\leftrightarrow} _{112} = \mathop{T}\limits^{\leftrightarrow} _{113} = \mathop{T}\limits^{\leftrightarrow} _{115} = \mathop{T}\limits^{\leftrightarrow} _{116} = \mathop{T}\limits^{\leftrightarrow} _{117} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{x}}} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{125} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),{ }\quad { }\mathop{T}\limits^{\leftrightarrow} _{121} = \mathop{T}\limits^{\leftrightarrow} _{122} = \mathop{T}\limits^{\leftrightarrow} _{123} = \mathop{T}\limits^{\leftrightarrow} _{124} = \mathop{T}\limits^{\leftrightarrow} _{126} = \mathop{T}\limits^{\leftrightarrow} _{127} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x} }}} \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{136} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{131} = \mathop{T}\limits^{\leftrightarrow} _{132} = \mathop{T}\limits^{\leftrightarrow} _{133} = \mathop{T}\limits^{\leftrightarrow} _{134} = \mathop{T}\limits^{\leftrightarrow} _{135} = \mathop{T}\limits^{\leftrightarrow} _{137} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x} }}} \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{147} = \left( {\vec{I}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x} }}} \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{141} = \mathop{T}\limits^{\leftrightarrow} _{142} = \mathop{T}\limits^{\leftrightarrow} _{143} = \mathop{T}\limits^{\leftrightarrow} _{144} = \mathop{T}\limits^{\leftrightarrow} _{145} = \mathop{T}\limits^{\leftrightarrow} _{146} = \left( {\vec{Z}_{1}^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{x} }}} \right) $$(59)
-
Boundary conditions of the clamped at the edge x = L:
$$ \mathop{T}\limits^{\leftrightarrow} _{151} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad { }\mathop{T}\limits^{\leftrightarrow} _{152} = \mathop{T}\limits^{\leftrightarrow} _{153} = \mathop{T}\limits^{\leftrightarrow} _{154} = \mathop{T}\limits^{\leftrightarrow} _{155} = \mathop{T}\limits^{\leftrightarrow} _{156} = \mathop{T}\limits^{\leftrightarrow} _{157} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{\theta }} \otimes \vec{Z}_{Nx}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{162} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{161} = \mathop{T}\limits^{\leftrightarrow} _{163} = \mathop{T}\limits^{\leftrightarrow} _{164} = \mathop{T}\limits^{\leftrightarrow} _{165} = \mathop{T}\limits^{\leftrightarrow} _{166} = \mathop{T}\limits^{\leftrightarrow} _{167} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta} } \otimes \vec{Z}_{Nx}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{173} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{171} = \mathop{T}\limits^{\leftrightarrow} _{172} = \mathop{T}\limits^{\leftrightarrow} _{174} = \mathop{T}\limits^{\leftrightarrow} _{175} = \mathop{T}\limits^{\leftrightarrow} _{176} = \mathop{T}\limits^{\leftrightarrow} _{177} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{Nx}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{184} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{181} = \mathop{T}\limits^{\leftrightarrow} _{182} = \mathop{T}\limits^{\leftrightarrow} _{183} = \mathop{T}\limits^{\leftrightarrow} _{185} = \mathop{T}\limits^{\leftrightarrow} _{186} = \mathop{T}\limits^{\leftrightarrow} _{187} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{\theta }} \otimes \vec{Z}_{Nx}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{195} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad { }\mathop{T}\limits^{\leftrightarrow} _{191} = \mathop{T}\limits^{\leftrightarrow} _{192} = \mathop{T}\limits^{\leftrightarrow} _{193} = \mathop{T}\limits^{\leftrightarrow} _{194} = \mathop{T}\limits^{\leftrightarrow} _{196} = \mathop{T}\limits^{\leftrightarrow} _{197} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{Nx}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{206} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{201} = \mathop{T}\limits^{\leftrightarrow} _{202} = \mathop{T}\limits^{\leftrightarrow} _{203} = \mathop{T}\limits^{\leftrightarrow} _{204} = \mathop{T}\limits^{\leftrightarrow} _{205} = \mathop{T}\limits^{\leftrightarrow} _{207} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{\theta }} \otimes \vec{Z}_{Nx}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{217} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{Nx}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{211} = \mathop{T}\limits^{\leftrightarrow} _{212} = \mathop{T}\limits^{\leftrightarrow} _{213} = \mathop{T}\limits^{\leftrightarrow} _{214} = \mathop{T}\limits^{\leftrightarrow} _{215} = \mathop{T}\limits^{\leftrightarrow} _{216} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{Nx}^{x} } \right) $$(60)
-
Boundary conditions of the clamped at the edge \(\theta \)=\({\theta }_{0}\):
$$ \mathop{T}\limits^{\leftrightarrow} _{221} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{222} = \mathop{T}\limits^{\leftrightarrow} _{223} = \mathop{T}\limits^{\leftrightarrow} _{224} = \mathop{T}\limits^{\leftrightarrow} _{225} = \mathop{T}\limits^{\leftrightarrow} _{226} = \mathop{T}\limits^{\leftrightarrow} _{227} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x}}} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{232} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{231} = \mathop{T}\limits^{\leftrightarrow} _{233} = \mathop{T}\limits^{\leftrightarrow} _{234} = \mathop{T}\limits^{\leftrightarrow} _{235} = \mathop{T}\limits^{\leftrightarrow} _{236} = \mathop{T}\limits^{\leftrightarrow} _{237} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x}}} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{243} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{241} = \mathop{T}\limits^{\leftrightarrow} _{242} = \mathop{T}\limits^{\leftrightarrow} _{244} = \mathop{T}\limits^{\leftrightarrow} _{245} = \mathop{T}\limits^{\leftrightarrow} _{246} = \mathop{T}\limits^{\leftrightarrow} _{247} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x}}} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{254} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{251} = \mathop{T}\limits^{\leftrightarrow} _{252} = \mathop{T}\limits^{\leftrightarrow} _{253} = \mathop{T}\limits^{\leftrightarrow} _{255} = \mathop{T}\limits^{\leftrightarrow} _{256} = \mathop{T}\limits^{\leftrightarrow} _{257} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x} }}} \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{265} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{261} = \mathop{T}\limits^{\leftrightarrow} _{262} = \mathop{T}\limits^{\leftrightarrow} _{263} = \mathop{T}\limits^{\leftrightarrow} _{264} = \mathop{T}\limits^{\leftrightarrow} _{266} = \mathop{T}\limits^{\leftrightarrow} _{267} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{x} }}} \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{276} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{271} = \mathop{T}\limits^{\leftrightarrow} _{272} = \mathop{T}\limits^{\leftrightarrow} _{273} = \mathop{T}\limits^{\leftrightarrow} _{274} = \mathop{T}\limits^{\leftrightarrow} _{275} = \mathop{T}\limits^{\leftrightarrow} _{277} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{x} }}} \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{287} = \left( {\vec{I}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{x}}} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{281} = \mathop{T}\limits^{\leftrightarrow} _{282} = \mathop{T}\limits^{\leftrightarrow} _{283} = \mathop{T}\limits^{\leftrightarrow} _{284} = \mathop{T}\limits^{\leftrightarrow} _{285} = \mathop{T}\limits^{\leftrightarrow} _{286} = \left( {\vec{Z}_{N\theta }^{\theta } \otimes {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{x} }}} \right) $$(61)
-
Simply boundary conditions at the edge x = 0:
$$ \mathop{T}\limits^{\leftrightarrow} _{11} = A_{11} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{A}_{1}^{x} } \right) + A_{12} \frac{sin\alpha }{{a_{0} }}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\mathop{T}\limits^{\leftrightarrow} _{12} = \mathop{T}\limits^{\leftrightarrow} _{13} = \mathop{T}\limits^{\leftrightarrow} _{15} = \mathop{T}\limits^{\leftrightarrow} _{16} = \mathop{T}\limits^{\leftrightarrow} _{17} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right),{ }\mathop{T}\limits^{\leftrightarrow} _{14} = B_{11} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{A}_{1}^{x} } \right) + B_{12} \frac{sin\alpha }{{a_{0} }}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{22} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\mathop{T}\limits^{\leftrightarrow} _{21} = \mathop{T}\limits^{\leftrightarrow} _{23} = \mathop{T}\limits^{\leftrightarrow} _{24} = \mathop{T}\limits^{\leftrightarrow} _{25} = \mathop{T}\limits^{\leftrightarrow} _{26} = \mathop{T}\limits^{\leftrightarrow} _{27} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{33} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),\quad { }\mathop{T}\limits^{\leftrightarrow} _{31} = \mathop{T}\limits^{\leftrightarrow} _{32} = \mathop{T}\limits^{\leftrightarrow} _{34} = \mathop{T}\limits^{\leftrightarrow} _{35} = \mathop{T}\limits^{\leftrightarrow} _{36} = \mathop{T}\limits^{\leftrightarrow} _{37} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{41} = B_{11} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{A}_{1}^{x} } \right) + B_{12} \frac{sin\alpha }{{a_{0} }}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\quad \mathop{T}\limits^{\leftrightarrow} _{42} = \mathop{T}\limits^{\leftrightarrow} _{43} = \mathop{T}\limits^{\leftrightarrow} _{45} = \mathop{T}\limits^{\leftrightarrow} _{46} = \mathop{T}\limits^{\leftrightarrow} _{47} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{44} = D_{11} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{A}_{1}^{x} } \right) + D_{12} \frac{sin\alpha }{{a_{0} }}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{55} = \left( {I^{\theta } \otimes I_{1}^{x} } \right),\quad \mathop{T}\limits^{\leftrightarrow} _{51} = \mathop{T}\limits^{\leftrightarrow} _{52} = \mathop{T}\limits^{\leftrightarrow} _{53} = \mathop{T}\limits^{\leftrightarrow} _{54} = \mathop{T}\limits^{\leftrightarrow} _{56} = \mathop{T}\limits^{\leftrightarrow} _{57} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{66} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\mathop{T}\limits^{\leftrightarrow} _{61} = \mathop{T}\limits^{\leftrightarrow} _{62} = \mathop{T}\limits^{\leftrightarrow} _{63} = \mathop{T}\limits^{\leftrightarrow} _{64} = \mathop{T}\limits^{\leftrightarrow} _{65} = \mathop{T}\limits^{\leftrightarrow} _{67} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$$$ \mathop{T}\limits^{\leftrightarrow} _{77} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{I}\limits ^{\theta }} \otimes \vec{I}_{1}^{x} } \right),{ }\mathop{T}\limits^{\leftrightarrow} _{71} = \mathop{T}\limits^{\leftrightarrow} _{72} = \mathop{T}\limits^{\leftrightarrow} _{73} = \mathop{T}\limits^{\leftrightarrow} _{74} = \mathop{T}\limits^{\leftrightarrow} _{75} = \mathop{T}\limits^{\leftrightarrow} _{76} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}}{\mathop{Z}\limits ^{\theta }} \otimes \vec{Z}_{1}^{x} } \right) $$(62)
-
Simply boundary conditions at the edge θ = 0:
$$ \begin{aligned} \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{81}} & = \left( {\vec{I}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right),\quad \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{82}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{83}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{84}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{85}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{86}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{87}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{92}} & = A_{{22}} \left( {\vec{A}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right),\quad \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{91}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{93}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{94}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{96}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{97}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right),\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{95}} = B_{{22}} \left( {\vec{A}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right), \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{103}} & = \left( {\vec{I}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right),\quad {\text{~}}\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{101}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{102}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{104}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{105}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{106}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{107}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right), \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{114}} & = \left( {\vec{I}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right),\quad {\text{~}}\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{112}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{113}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{114}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{115}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{116}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{117}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right), \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{122}} & = B_{{22}} \left( {\vec{A}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right),\quad \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{121}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{123}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{124}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{126}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{127}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right),{\text{~}}\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{125}} = D_{{22}} \left( {\vec{A}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right), \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{136}} & = \left( {\vec{I}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right),\quad \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{131}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{132}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{133}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{134}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{135}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{137}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right), \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{147}} & = \left( {\vec{I}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right),\quad \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{141}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{142}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{143}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{144}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{145}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{146}} = \left( {\vec{Z}_{1}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \end{aligned} $$(63)
-
Simply boundary conditions at the edge x = L:
$$ \begin{aligned} \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{151}} & = A_{{11}} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{A}_{{Nx}}^{x} } \right) + A_{{12}} \frac{{sin\alpha }}{b}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{152}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{153}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{155}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{156}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{157}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right),~~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{154}} = B_{{11}} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{A}_{{Nx}}^{x} } \right) + B_{{12}} \frac{{sin\alpha }}{b}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{162}} & = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{161}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{163}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{164}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{165}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{166}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{167}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{173}} & = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{171}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{172}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{174}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{175}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{176}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{177}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{181}} & = B_{{11}} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{A}_{{Nx}}^{x} } \right) + B_{{12}} \frac{{sin\alpha }}{b}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{182}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{183}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{185}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{186}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{187}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right),~~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{184}} = D_{{11}} \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{A}_{{Nx}}^{x} } \right) + D_{{12}} \frac{{sin\alpha }}{b}\left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{195}} & = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{191}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{192}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{193}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{194}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{196}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{197}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{206}} & = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{201}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{202}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{203}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{204}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{205}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{207}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{217}} & = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{\theta } \otimes \vec{I}_{{Nx}}^{x} } \right),~~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{211}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{212}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{213}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{214}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{215}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{216}} = \left( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{\theta } \otimes \vec{Z}_{{Nx}}^{x} } \right) \\ \end{aligned} $$(64)
-
Simply boundary conditions at the edge \(\theta \)=\({\theta }_{0}\):
$$\begin{aligned} \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{221}} & = \left( {\vec{I}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right) \\ ~\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{222}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{223}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{224}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{225}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{226}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{227}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{232}} & = A_{{22}} \left( {\vec{A}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{231}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{233}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{234}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{236}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{237}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{235}} & = B_{{22}} \left( {\vec{A}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{243}} & = \left( {\vec{I}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{241}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{242}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{244}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{245}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{246}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{247}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{254}} & = \left( {\vec{I}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{252}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{253}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{254}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{255}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{256}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{257}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{262}} & = B_{{22}} \left( {\vec{A}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{261}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{263}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{264}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{266}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{267}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{262}} & = B_{{22}} \left( {\vec{A}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {a} _{1} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{261}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{263}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{264}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{266}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{267}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{276}} & = \left( {\vec{I}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{271}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{272}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{273}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{274}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{275}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{277}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{287}} & = \left( {\vec{I}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {I} ^{x} } \right) \\ \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{281}} & = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{282}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{283}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{284}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{285}} = \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {T} _{{286}} = \left( {\vec{Z}_{{N\theta }}^{\theta } \otimes \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\leftrightarrow}$}} {Z} ^{x} } \right) \\ \end{aligned} $$(65)
By removing the governing equation at the boundary points, Eq. (54) can be expressed as follows:
By separating the columns corresponding to the border and middle points in Eqs. (54) and (58), these relationships can be expressed as follows:
Using Eq. (67b), the following relation can be expressed between the displacement at the boundary and intermediate points:
in which
By inserting Eq. (68) into Eq. (67a), the following relation can be expressed:
in which
The above equation is an eigenvalue problem and its solution process is as follows:
-
First, the nonlinear term in (71) is omitted, and as a result, the linear eigenvalue and its corresponding eigenvector are obtained.
-
Using the linear eigenvalue, the nonlinear term can be evaluated. By inserting the nonlinear expression in the eigenvalue problem, the nonlinear eigenvalue and the corresponding eigenvector will be obtained.
-
The above process continues until the eigenvalues for two consecutive values satisfy the following convergence relation.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ebrahimi, F., Mollazeinal, A. & Ahari, M.F. Nonlinear vibration analysis of smart truncated conical porous composite shells reinforced with Terfenol-D particles. Acta Mech 235, 691–734 (2024). https://doi.org/10.1007/s00707-023-03746-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-023-03746-5