
Abstract
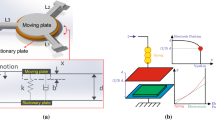
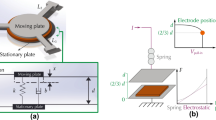
Parallel-plates based micro-tunable capacitors are known to have low travel ranges, which deteriorate as going even lower in terms of their initials gap sizes. Such conditions have put strict requirements on the operation of such designs and hence hindering their use in numerous practical applications requiring high tunability. This work is proposed to examine the possibility to implement a closed-loop control strategy to increase the maximum capacitance and therefore tunability of micro tunable capacitors. The suggested control strategy is implemented on an electrostatically actuated parallel-plates (one stationary and one movable) based micro-capacitor and had an objective to stabilize the movable electrode when it is close to the fixed one for the sake of maximizing its maximum capacitance and possibly improving its overall tunability. Robustness of the micro-capacitor to the so-called pull-in phenomenon (short-circuit instability) when using the closed loop control scheme is studied. Indeed, an adaptive sliding mode controller is designed to compensate the effects of uncertainty, disturbance and eliminate any possibility for chattering phenomenon. The controller proficiencies in terms of stabilizing the micro-capacitor and its robustness to uncertainty as well as disturbance have been thoroughly examined. Furthermore, the effects of the control parameters on the behavior of micro-capacitor, such as overshoot, settling time, steady state error, robustness to uncertainty, external disturbances and to the chattering phenomenon, have been completely inspected. The obtained results indicated satisfactory proficiency and trustworthiness of the proposed control strategy to achieve high level of tunability and maximum capacitance.












Similar content being viewed by others
References
Afrang S, Nematkhah NJ (2019) A new MEMS based variable capacitor using electrostatic vertical comb drive actuator and auxiliary cantilever beams. Microsyst Technol 25:1–11
Afrang S et al (2015) A new MEMS based variable capacitor with wide tunability, high linearity and low actuation voltage. Microelectron J 46(2):191–197
Aghababa MP (2017) Sliding-mode control composite with disturbance observer for tracking control of mismatched uncertain nDOF nonlinear systems. IEEE/ASME Trans Mechatron 23(1):482–490
Aghababa MP (2018) Stabilization of canonical systems via adaptive chattering free sliding modes with no singularity problems. IEEE/ASME Trans Mechatron 50:1696–1703
Aghababa MP, Akbari ME (2012) A chattering-free robust adaptive sliding mode controller for synchronization of two different chaotic systems with unknown uncertainties and external disturbances. Appl Math Comput 218(9):5757–5768
Akhtar A, et al (2018) Design and simulation of MEMS based varactor with high tunability for digital communication systems. In: 2018 IEEE 9th annual information technology, electronics and mobile communication conference (IEMCON), IEEE
Alsaleem FM, Younis MI, Ouakad HM (2009) On the nonlinear resonances and dynamic pull-in of electrostatically actuated resonators. J Micromech Microeng 19(4):045013
Barzegar S, Mirzajani H, Ghavifekr HB (2015) A new linearly tunable RF MEMS varactor with latching mechanism for low voltage and low power reconfigurable networks. Wireless Pers Commun 83(3):2249–2265
Choi S, et al (2004) A tunable capacitor using an immiscible bifluidic dielectric. In: 2004 IEEE MTT-S international microwave symposium digest (IEEE Cat. No. 04CH37535), IEEE
Dai H-Y, Li L (2018) Wideband tunable high common-mode suppression filter based on varactor-loaded slotted ground. Prog Electromagn Res 77:73–80
Galisultanov A et al (2018) Contactless four-terminal MEMS variable capacitor for capacitive adiabatic logic. Smart Mater Struct 27(8):084001
Gong Z et al (2018) Optimization of a MEMS variable capacitor with high linearity and large tuning ratio. Microsyst Technol 24(7):3169–3178
Hailu Z (2017) High quality factor RF MEMS tunable capacitor. Microsyst Technol 23(8):3719–3730
Hashtarkhani B, Aghababa M (2013) Introducing a new sliding manifold applied for control of uncertain nonlinear brushless DC and permanent magnet synchronous motors. Sci Iran 20(6):2073
Jamil A, Kalkur TS, Cramer N (2007) Tunable ferroelectric capacitor-based voltage-controlled oscillator. IEEE Trans Ultrason Ferroelectr Freq Control 54(2):222–226
Jin J et al (2014) A wideband voltage-controlled oscillator with gain linearized varactor bank. IEEE Trans Compon Packag Manuf Technol 4(5):905–910
Khalili AA, Mohamed Z, Basri MAM (2019) Enhanced backstepping sliding mode controller for motion tracking of a nonlinear 2-DOF piezo-actuated micromanipulation system. Microsyst Technol 25:1–13
Khan F, Lu J, Zhu Y (2019) Experimental investigation of actuation in a micromachined electrically floating tunable capacitor. Microelectron Eng 213:31–34
Kim J, Cho H, Park J (2017) A high performance and ultra wide tuned capacitor using netted membrane structure for reconfigurable RF systems. In: 2017 IEEE 30th international conference on micro electro mechanical systems (MEMS), IEEE
Li L, et al (2013) Symmetric toggle structured MEMS linear variable capacitor with large tunning ratio. In: The 8th annual IEEE international conference on nano/micro engineered and molecular systems, IEEE
Luo S, Lewis FL, Song Y, Ouakad HM (2020) Accelerated adaptive fuzzy optimal control of three coupled fractional-order chaotic electromechanical transducers. IEEE Trans Fuzzy Syst. https://doi.org/10.1109/TFUZZ.2020.2984998
Martowicz A, Stanciu I, Uhl T (2016) Uncertainty analysis for dynamic properties of MEMS resonator supported by fuzzy arithmetics. Int J Multiphys 3(3):201–219
Mazumder J, Song L, Wang C (2019) In-situ identification and control of microstructures produced by phase transformation of a material. Google Patents
Mobki H et al (2011) On the tunability of a MEMS based variable capacitor with a novel structure. Microsyst Technol 17(9):1447
Mobki H et al (2014) Design, simulation and bifurcation analysis of a novel micromachined tunable capacitor with extended tunability. Trans Can Soc Mech Eng 38(1):15–29
Mobki H, Sadeghi M, Rezazadeh GJ (2015) Application of Thau observer for fault detection of micro parallel plate capacitor subjected to nonlinear electrostatic force. Int J Eng 28(2):270–276
Mobki H et al (2019) Multi input versus single input sliding mode for closed-loop control of capacitive micro structures. SN Appl Sci 1(7):676
Nabovati H et al (2006) Design and simulation of an oblique suspender MEMS variable capacitor. Scientia Iranica 13(1):60–66
Ouakad HM (2013) An electrostatically actuated MEMS arch band-pass filter. Shock Vib 20(4):809–819
Ouakad HM, AlQasimi JE (2018) Comprehensive analytical approximations of the pull-in characteristics of an electrostatically actuated nanobeam under the influences of intermolecular forces. In: Actuators 2018, Multidisciplinary Digital Publishing Institute, vol 7, No 1, p 3
Ouakad HM, Younis MI (2014) On using the dynamic snap-through motion of MEMS initially curved microbeams for filtering applications. J Sound Vib 333(2):555–568
Ouakad HM, Nayfeh AH, Choura S, Abdel-Rahman EM, Najar F, Hammad B (2008) Nonlinear feedback control and dynamics of an electrostatically actuated microbeam filter. In: ASME 2008 International Mechanical Engineering Congress and Exposition, American Society of Mechanical Engineers Digital Collection, pp 535–542
Ouakad HM, Nayfeh AH, Choura S, Najar F (2015) Nonlinear feedback controller of a microbeam resonator. J Vib Control 21(9):1680–1697
Ouakad HM, Hasan MH, Jaber NR, Al Hafiz MA, Alsaleem F, Younis M (2020) On the double resonance activation of electrostatically actuated microbeam based resonators. Int J Non-linear Mech 121:103437
Oz A (2003) CMOS/BiCMOS self-assembling and electrothermal microactuators for tunable capacitors. Carnegie-Mellon Univ Pittsburgh Pa Dept of Electrical and Computer Engineering
Pagazani J et al (2011) A new design for rotational, tunable wideband RF MEMS capacitors. Microsyst Technol 17(4):513–522
Rahmani M, Rahman MH (2019) A novel compound fast fractional integral sliding mode control and adaptive PI control of a MEMS gyroscope. Microsyst Technol 25:1–7
Rahmani M et al (2018) Optimal novel super-twisting PID sliding mode control of a MEMS gyroscope based on multi-objective bat algorithm. Microsyst Technol 24(6):2835–2846
Rajaei A et al (2019) Integral sliding mode control for nonlinear damped model of arch microbeams. Microsyst Technol 25(1):57–68
Ramli NA et al (2018) Design, simulation and analysis of a digital RF MEMS varactor using thick SU-8 polymer. Wireless Pers Commun 24(1):473–482
Shavezipur M et al (2010) Development of a triangular-plate MEMS tunable capacitor with linear capacitance–voltage response. Microelectron Eng 87(9):1721–1727
Shavezipur M et al (2012) Linearization and tunability improvement of MEMS capacitors using flexible electrodes and nonlinear structural stiffness. J Micromech Microeng 22(2):025022
Slotine J-JE, Li W (1991) Applied nonlinear control, vol 199. Prentice hall Englewood Cliffs, NJ
Teymoori MM, Ahangarkolaei JM (2016) A tunable capacitor based on MEMS technology for RF applications. Eng Technol Appl Sci Res 6(3):982–986
Vitale WA et al (2016) Electrothermal actuation of vanadium dioxide for tunable capacitors and microwave filters with integrated microheaters. Sens Actuators A 241:245–253
Wang Y et al (2014) Identification of contact bouncing vibrations using TFC active slider and adaptive fuzzy control for advanced active slider design. Microsyst Technol 20(8–9):1705–1713
Xu B, Zhang P (2017) Minimal-learning-parameter technique based adaptive neural sliding mode control of MEMS gyroscope. Complexity 2017:1–8
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Appendix A: Proof of the controller stability
If we consider a Lyapunov function described by the below expression:
Its time derivative can therefore be written as follows:
If we consider a sliding surface governed by the following state equation: \( s = \dot{e}_{1} + k_{s} e_{1} = e_{2} + k_{s} e_{1} \), therefore for \( \dot{s} \) the following relationship cab be also valid:
Substituting Eq. (12) into Eq. (11), we can write:
Next, substituting the control law of Eq. (3) and the related relationship of \( \dot{\hat{\alpha }} \), \( \dot{\hat{\beta }} \), \( \dot{\mu } \), and \( \dot{\theta } \) into Eq. (13), the time derivative of the Lyapunov function \( \dot{v} \) can be re-written as:
According to the assumed conditions: \( \left| {\Delta F\left( {x,t} \right)} \right| \le \alpha \) and \( \left| {d\left( t \right)} \right| \le \beta \), consequently the following conditions can also be verified: \( s\Delta F\left( {x,t} \right) \le \left| s \right|\alpha \) and \( sd\left( t \right) \le \left| s \right|\beta \).
Assuming the abovementioned relationships, the following inequality can be obtained for \( \dot{v} \):
Knowing that: \( s\tanh \left( {\theta s} \right) = \left| s \right|\left| {\tanh \left( {\theta s} \right)} \right| \) (Aghababa and Akbari 2012), \( \dot{v} \) can be finally re-written as follows:
The term inside of brackets “{}” represents a positive number, and subsequently the condition \( \dot{v} \le - \left| s \right|\left\{ \eta \right\} \) for the presented controller is therefore guaranteed, for which \( \eta \) represents a positive number.
Rights and permissions
About this article

Cite this article
Mobki, H., Sabegh, A.M., Azizi, A. et al. On the implementation of adaptive sliding mode robust controller in the stabilization of electrically actuated micro-tunable capacitor. Microsyst Technol 26, 3903–3916 (2020). https://doi.org/10.1007/s00542-020-04882-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-04882-x