
Abstract
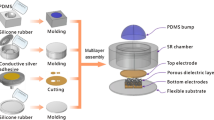
In this paper, a new flexible three-axial force sensor was designed and investigated, which was composed of four capacitors, and the mechanism was based on the capacitance change induced by an applying three-axial force. For the configuration of the electrodes, four sensing electrodes and a public electrode were in the same plane, which was based on fringe effect theory. Different from the traditional dielectric layer with single material, this multilayered dielectric consisted of both the air gap and polydimethylsiloxane. The structure of the multilayered dielectric changed under the external/applied force, leading to variation of dielectric constant ε, which caused the capacitance change. Measurement results showed that the full-scale range of detectable force was around 0–10 N for all three axes. The average sensitivities of the force sensor units were 0.0095, 0.0053, and 0.0060 N−1 for the normal, X-axis, and Y-axis shear forces, and more test proved its high potential for application in skin-like sensing field.








Similar content being viewed by others


References
Bütefisch S, Büttgenbach S, Kleine-Besten T, Brand U (2001) Micromechanical three-axial tactile force sensor for micromaterial characterisation. Microsyst Technol 7:171–174
Canavese G et al (2014) Piezoresistive flexible composite for robotic tactile applications. Sens Actuators A 208:1–9
Cheng M-Y, Lin C-L, Lai Y-T, Yang Y-J (2010) A polymer-based capacitive sensing array for normal and shear force measurement. Sensors 10:10211–10225
Cheng M-Y, Tsao C-M, Lai Y-Z, Yang Y-J (2011) The development of a highly twistable tactile sensing array with stretchable helical electrodes. Sens Actuators A 166:226–233
Chuang C-H, Liou Y-R, Shieh M-Y (2012) Flexible tactile sensor array for foot pressure mapping system in a biped robot. Smart Struct Syst 9:535–547
Duchaine V, Lauzier N, Baril M, Lacasse M-A, Gosselin CA (2009) Flexible robot skin for safe physical human robot interaction. In: Robotics and Automation, 2009. ICRA’09. IEEE International Conference, pp 3676–3681
Huang Y-M, Tsai N-C, Lai J-Y (2010) Development of tactile sensors for simultaneous, detection of normal and shear stresses. Sens Actuators A 159:189–195
Lee H-K, Chung J, Chang S-I, Yoon E (2008) Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J Microelectromech Syst 17(4):934–942
Lee H-K, Chung J, Chang S-I, Yoon E (2011) Real-time measurement of the three-axis contact force distribution using a flexible capacitive polymer tactile sensor. J Micromech Microeng 21:035010
Lei KF, Lee K-F, Lee M-Y (2012) Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron Eng 99:1–5
Li N, Zhu H, Wang W, Gong Y (2014) Parallel double-plate capacitive proximity sensor modelling based on effective theory. AIP Adv 4:027119
Lindeberg M, Hjort K (2004) A comprehensive study of ion track enabled high aspect ratio microstructures in flexible circuit boards. Microsyst Technol 10:608–621
Liu X, Zhu Y, Nomani MW, Wen X, Hsia T-Y, Koley G (2013) A highly sensitive pressure sensor using a Au-patterned polydimethylsiloxane membrane for biosensing applications. J Micromech Microeng 23:025022
Massaro A, Spano F, Missori M, Malvindi MA, Cazzato P, Cingolani R, Athanassiou A (2014) Flexible nanocomposites with all-optical tactile sensing capability RSC. Advances 4:2820–2825
Muhammad H et al (2011) Development of a bioinspired MEMS based capacitive tactile sensor for a robotic finger. Sens Actuators A 165:221–229
Ohka M, Mitsuya Y, Matsunaga Y, Takeuchi S (2004) Sensing characteristics of an optical three-axis tactile sensor under combined loading. Robotica 22:213–221
Rocha JGVd, Rocha PFAd, Lanceros-Mendez S (2009) Capacitive sensor for three-axis force measurements and its readout electronics. IEEE Trans Instrum Meas 58:2830–2836
Rothmaier M, Luong MP, Clemens F (2008) Textile pressure sensor made of flexible plastic optical fibers. Sensors 8:4318–4329
Takahashi H, Nakai A, Thanh-Vinh N, Matsumoto K, Shimoyama I (2013) A triaxial tactile sensor without crosstalk using pairs of piezoresistive beams with sidewall doping. Sens Actuators A Phys 199:43–48
Tanaka Y, Tanaka M, Chonan S (2007) Development of a sensor system for collecting tactile information. Microsyst Technol 13:1005–1013
Tjin S, Suresh R, Ngo N (2004) Fiber Bragg grating based shear-force sensor: modeling and testing. J Lightwave Technol 22:1728
Watanabe K, Sohgawa M, Kanashima T, Okuyama M, Norna H (2013) Identification of various kinds of papers using multi-axial tactile sensor with micro-cantilevers. In: World Haptics Conference (WHC). IEEE, pp 139–144
Acknowledgments
This work was financially supported by the Program of National Natural Science Foundation of China (Nos. 61401141, 61471155), Anhui Provincial Natural Science Foundation (No. 1508085QF115) and Research Development Funds of Hefei University of Technology (No. J2014HGXJ0087).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Huang, Y., Yuan, H., Kan, W. et al. A flexible three-axial capacitive tactile sensor with multilayered dielectric for artificial skin applications. Microsyst Technol 23, 1847–1852 (2017). https://doi.org/10.1007/s00542-016-2936-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-016-2936-x