
Abstract
We develop the theory of torsional rigidity—a quantity routinely considered for Dirichlet Laplacians on bounded planar domains—for Laplacians on metric graphs with at least one Dirichlet vertex. Using a variational characterization that goes back to Pólya, we develop surgical principles that, in turn, allow us to prove isoperimetric-type inequalities: we can hence compare the torsional rigidity of general metric graphs with that of intervals of the same total length. In the spirit of the Kohler-Jobin inequality, we also derive sharp bounds on the ground-state energy of a quantum graph in terms of its torsional rigidity: this is particularly attractive since computing the torsional rigidity reduces to inverting a matrix whose size is the number of the graph’s vertices and is, thus, much easier than computing eigenvalues.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Our aim in this article is to develop the theory of torsional rigidity for Laplacians on metric graphs: Following the terminology introduced by Pólya in [52], we will call torsion function (with respect to the Dirichlet set \({{\textsf{V}_{\textrm{D}}}}\)) of a metric graph \(\mathcal {G}\) with vertex set \(\textsf{V}\supset {{\textsf{V}_{\textrm{D}}}}\ne \emptyset \) the unique solution v of the elliptic problem
and torsional rigidity its \(L^1\)-norm \(T(\mathcal {G}):=T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}}):=\Vert v\Vert _{L^1}\).
General self-adjoint differential operators supported on metric graphs are a popular toy model in both spectral theory and analysis of evolution equations [11, 38, 45]: they usually go under the name of quantum graphs. In particular, much attention has been lately devoted to the study of the interplay of graphs’ connectivity and metric properties on the one hand, and Laplacian eigenvalues on the other; while torsional properties of metric graphs have been, to the best of our knowledge, only discussed in [21].
The theory of torsional rigidity of three-dimensional bodies with constant section \(\Omega {\subset \mathbb {R}^{2}}\) goes back to Saint-Venant [56], but the first rigorous mathematical contributions can be found in [52, 54]. In his early meaning, torsional rigidity is a quantity in rational mechanics: defined as the \(L^1\)-norm of the solution v of
it is proportional (by \(\theta \mu \), where \(\mu \) is the body’s shear modulus) to the couple resisting a given twist \(\theta \). Pólya observes that the torsional rigidity is “a purely geometric constant, depending on size and shape of the domain” [52]: indeed, a classical result by Pólya—clearly reminiscent of the Faber–Krahn inequality for the ground-state energy of the Dirichlet Laplacian and already conjectured by Saint-Venant based on physical considerations—states that of all open bounded domains \(\Omega \subset \mathbb {R}^2\) of given area \(|\Omega |\), the circular one has the greatest torsional rigidity, i.e.,

The crucial idea in Pólya’s approach was the observation ([52, page 272], see also [54, § 9B]) that \(T(\Omega )\) can be conveniently considered as a critical point of the Euler–Lagrange equation associated with (1.2) and that, accordingly, \(T(\Omega )\) admits a variational characterization as
see, e.g., [13, Proposition 2.2]. Indeed, these suprema are attained and the unique maximizer of (1.3) is precisely the solution of (1.2): it is called torsion function in the literature (or sometimes warping function, [4, Section II.2.3]). In the last decade it has attracted further interest after its role in wave localization phenomena for general Schrödinger operators has been greatly popularized by Filoche and Mayboroda [26]. Ever since Pólya’s pioneering study, investigations by Makai, Payne, Kohler-Jobin, and further authors have convincingly shown the rich theory of torsional rigidity in the context of shape optimization, often using symmetrization and rearrangement techniques.
This is the starting point of our article: Indeed, Pólya’s basic definitions and properties of torsion on domains can be easily seen to carry over to metric graphs, up to replacing Lebesgue and Sobolev spaces on planar domains by their counterparts on metric graphs, thus leading to (1.1). We are going to consider the Laplacian \(\Delta _{\mathcal {G}}\) on \(\mathcal {G}\) with Dirichlet conditions on the vertices in \({{\textsf{V}_{\textrm{D}}}}\) and study two classes of problems: on one hand, we will prove sharp estimates on the torsional rigidity \(T(\mathcal {G}):={T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})}\) in its own right, like
[see Eqs. (4.4) and (4.7)], where \(|\mathcal {G}|\) is the total length of the metric graph \(\mathcal {G}\) and \(|\textsf{E}|\) is the number of its edges; in particular, the torsional rigidity scales as \(|\mathcal {G}|^3\). (In the case of domains, estimates like these are not available unless Dirichlet conditions are imposed on the whole boundary. Because \(\Delta _\mathcal {G}\) is not invertible in \(L^2(\mathcal {G})\) if \({{\textsf{V}_{\textrm{D}}}}=\emptyset \), formally \(T(\mathcal {G};\emptyset )=\infty \): it is hence remarkable that the uniform estimate in (1.4) holds as soon as \({{\textsf{V}_{\textrm{D}}}}\ne \emptyset \).)
On the other hand, by using techniques that are classical in the theory of of torsional rigidity, we will provide estimates on the ground-state energy
(i.e., the lowest eigenvalue of \(-\Delta _\mathcal {G}\)) by other objects, like
[see Eqs. (5.1) and (5.9)], where \(p_{\mathcal {G}{;{{\textsf{V}_{\textrm{D}}}}}}\in L^1(\mathbb {R}_+\times \mathcal {G}\times \mathcal {G})\) is the heat kernel, i.e., the integral kernel of the heat semigroup generated by \(\Delta _\mathcal {G}\) with Dirichlet conditions on the vertices in \({{\textsf{V}_{\textrm{D}}}}\).
Not only will we replicate some of the most important results on torsion function and torsional rigidity of planar domains in the context of metric graph; we are also going to refine the direct counterparts of the classical results for special classes of metric graphs, like trees (i.e., simply connected metric graphs) or doubly connected graphs. Indeed, in the one-dimensional setting of metric graphs techniques can be applied that seem to not be available in higher dimensional settings. On one hand, the Eq. (1.1) can be solved in a semi-explicit way by solving an algebraic system of \(|\textsf{V}|-|{{\textsf{V}_{\textrm{D}}}}|\) equations in \(|\textsf{V}|-|{{\textsf{V}_{\textrm{D}}}}|\) unknowns, where \(|\textsf{V}|\) is the number of vertices of \(\mathcal {G}\) and \(|{{\textsf{V}_{\textrm{D}}}}|\) is the number of Dirichlet vertices: this paves the road to a geometric description of the torsion function that is much easier than for eigenfunctions. At the same time, the last decade has witnessed strong advances in the refinement of surgical principles for critical points of functionals defined on metric graphs: the recent article [10] is a comprehensive collection of techniques that go far beyond elementary test-function arguments. We are thus going to borrow some ideas proposed by several authors for the study of spectral geometry of metric graphs, including [3, 17, 20, 28, 33], and combine them with techniques more typical of higher dimensional torsional theory [13, 35, 52]. In this way, not only can we reproduce in the metric graph context some well-known geometric bounds on the torsional rigidity and its product with (a power of) the ground-state energy; we can also sharpen some of them in the case of graphs of higher connectivity—a behavior that in the context of Laplacian eigenvalues of metric graphs has been discovered in [3, 17], but seems to have no counterpart in torsional theory of higher dimensional domains.
A further remarkable feature of torsional rigidity is its interplay with the heat equation, already hinted at in (1.5). Indeed, for the Laplacian \(\Delta _\mathcal {G}\) on a metric graph \(\mathcal {G}\) with Dirichlet conditions on a non-empty set \({{\textsf{V}_{\textrm{D}}}}\) of vertices (and natural—i.e., continuity and Kirchhoff—conditions at all other vertices \(\textsf{V}{\setminus } {{\textsf{V}_{\textrm{D}}}}\)), the quantity
is called the heat content of \(\mathcal {G}\) at time t: intuitively, the profile of \(t\mapsto {\mathcal {Q}}_{\mathcal {G}}(t)\) describes how fast a metric graph is dissipating heat. Because \((\textrm{e}^{t\Delta _{\mathcal {G}}})_{t\ge 0}\) is known to satisfy Gaussian estimates [44, Thm. 4.7], \( t\mapsto {{\mathcal {Q}}}_{\mathcal {G}}(t) \) is of class \(L^1(0,\infty )\): we will call the \(L^1\)-norm of \(Q_{\mathcal {G}}\), i.e.,
the integrated heat content of \(\mathcal {G}\) (with respect to the Dirichlet vertex \({{\textsf{V}_{\textrm{D}}}}\)). While it is known at latest since [6] that the heat content—at least in the case of domains in \(\mathbb {R}^d\)—carries interesting geometric information, estimates on \({{\mathcal {Q}}}_{\mathcal {G}}(t)\) are not easy to derive and will be discussed in a companion paper [46]. However, the integrated heat content is a much more treatable quantity: our main results in this paper can be interpreted as geometric estimates (from above and below) of such integrated heat content, as in (1.5). Indeed, the integrated heat content agrees with the torsional rigidity of \(\mathcal {G}\), in view of elementary results from semigroup theory.
Let us present the plan of this article.
After recalling some basic definitions in the theory of metric graphs, we introduce the torsional rigidity of a quantum graph in Sect. 2. We also compute the torsional rigidity in a few simple examples.
In Sect. 3 we present a first simple, yet effective tool for our analysis: we show (Proposition 3.1) that a quantum graph’s torsion function can be computed explicitly—unlike for eigenfunctions, this is true even in the non-equilateral case!—upon passing to a discretized problem: this boils down to solve an algebraic system of linear equations.
In Sect. 4 we introduce (Proposition 4.1) a new toolbox, mostly inspired by the spectral surgical methods developed in [10, 17, 33]. We use them to prove two main bounds on the torsional rigidity: a lower and an upper bound based on the inradius of \(\mathcal {G}\) and on its total length, respectively (Proposition 4.4 and Theorem 4.6): both bounds can be improved if \(\mathcal {G}\) is known to be simply connected (i.e., \(\mathcal {G}\) is a tree graph) or doubly connected, respectively.
We then turn to our most significant topic: the derivation of estimates on the ground-state energy of a quantum graph by means of its torsional rigidity. In Sect. 5 we present an upper bound (Proposition 5.1) whose domain counterpart goes back to Pólya (and which can be slightly modified to prove that the torsional rigidity also yields an upper estimate on the Cheeger constant of a metric graph); and a lower bound (Theorem 5.8), whose much more involved proof is based on a rearrangement technique introduced by Kohler-Jobin and recently extended in [13].
Finally, in Sect. 6 we study a different but related topic: we discuss the possible use of the torsion function as a landscape function, elaborating on known results from [2, 5, 26, 29, 58] and extending them to the general setting of operators satisfying suitable forms of maximum principles on Banach lattices. Our observations about landscape functions are applied to metric graphs, but we offer an outlook to even more general settings.
2 Preliminaries and notation
Throughout this article let \(\mathcal {G}\) be a metric graph with edge set \(\textsf{E}=\textsf{E}_\mathcal {G}\) and vertex set \(\textsf{V}=\textsf{V}_\mathcal {G}\). We refer to [43] for a precise introduction of the canonical structure of metric measure space induced on \(\mathcal {G}\) by the Euclidean distance and the Lebesgue measure.
We impose the following assumption.
Assumption 2.1
The metric graph \(\mathcal {G}\) is connected, i.e., there is a continuous path connecting any two points on the graph. It is compact and finite, i.e., it consists of finitely many edges of finite length.
For an edge \(\textsf{e}\in \textsf{E}\), let \(\ell _\textsf{e}\) denote its length, and, for a vertex \(\textsf{v}\in \textsf{V}\), let \(\deg _\mathcal {G}(\textsf{v})\) denote its degree, i.e. the number of edges incident in \(\textsf{v}\). Let \({{\,\textrm{dist}\,}}_\mathcal {G}:\mathcal {G}\times \mathcal {G}\rightarrow [0,\infty )\) denote the path metric on \(\mathcal {G}\). We suppose that \(\mathcal {G}\) has at least one vertex of degree \(1\). Let \({{\textsf{V}_{\textrm{D}}}}=\textsf{V}_{{\textrm{D}},\mathcal {G}}\) be a fixed subset of
and let \({\textsf{V}_{\textrm{N}}}:=\textsf{V}_{{\textrm{N}},\mathcal {G}}=\textsf{V}{\setminus } {{\textsf{V}_{\textrm{D}}}}\) be its complement in \(\textsf{V}\).
Let \(\Delta _\mathcal {G}\) be the Laplacian on \(\mathcal {G}\) Dirichlet vertex condition in \({{\textsf{V}_{\textrm{D}}}}\) and natural (i.e., the Kirchhoff-type condition
along with continuity across the vertices) vertex conditions on \({\textsf{V}_{\textrm{N}}}\), i.e. its associated quadratic form \(a=a_{\mathcal {G}}\) is given by
on the domain
(Throughout this article, \(u_\textsf{e}\) denotes the restriction of u to the edge \(\textsf{e}\).) We refer to \({{\textsf{V}_{\textrm{D}}}}\) as the set of Dirichlet vertices of \(\mathcal {G}\) and to \({\textsf{V}_{\textrm{N}}}\) as the set of natural vertices of \(\mathcal {G}\).
Definition 2.2
Let \(\mathcal {G}\) be a metric graph satisfying Assumptions 2.1 and let \({{\textsf{V}_{\textrm{D}}}}\) be a non-empty subset of \(\textsf{V}\). Then the torsion function v of \(\mathcal {G}\) is the unique solution of
Additionally, we introduce the torsional rigidity
Remark 2.3
By definition, \({{\textsf{V}_{\textrm{D}}}}\) is a set whose elements are all vertices of degree 1. At the same time, as far as the quadratic form \(a_\mathcal {G}\) and hence the Laplacian spectrum are concerned, nothing changes if two or more Dirichlet vertices are glued, even though this certainly affects the topology of the underlying graph. To avoid confusion, we thus introduce the quantity
which is invariant under gluing of Dirichlet vertices.
At the danger or being redundant, we stress that the torsional rigidity \(T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) does depend on the set \({{\textsf{V}_{\textrm{D}}}}\) of vertices on which Dirichlet conditions are imposed; and that the associated torsion function v belongs to \(D(\Delta _{\mathcal {G}})\subset C(\mathcal {G})\cap \bigoplus _{\textsf{e}\in \textsf{E}}C^1([0,\ell _\textsf{e}])\) and satisfies the Dirichlet condition at the vertices in \({{\textsf{V}_{\textrm{D}}}}\), hence in particular it belongs to \(H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\). If \({{\textsf{V}_{\textrm{D}}}}\) is clear from the context, we will in the following write \(H^1_0(\mathcal {G})\) and \(T(\mathcal {G})\) instead of \(H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) and \(T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\).
Pólya’s proof of (1.3) carries over verbatim to the case of compact metric graphs, leading to
in the following, we will refer to the term on the right hand side as Pólya quotient.
The maxima of this Pólya quotient in (2.3) form a one-dimensional space spanned by the torsion function v.
Since \(\mathcal {G}\) is compact, and because \(H^1_0(\mathcal {G})\) is an ideal of \(H^1(\mathcal {G})\) in the sense of Banach lattices, see [49, Definition 2.19 and also Proposition 2.23] (in particular, \(u\in H^1_0(\mathcal {G})\) implies \(|u|\in H^1_0(\mathcal {G})\)) and switching from u to |u| can only raise the quotient on the right hand side of (2.3), we find that
Example 2.4
In the 1-dimensional case the torsion function can be easily determined: if we let \(a>0\) and consider the Poisson equation
with Robin boundary conditions, then the solution is given by
(1) Let us now consider both relevant cases of a bounded interval of length a with either mixed Dirichlet/Neumann conditions, or else with Dirichlet boundary conditions at both endpoints, byspecializing (2.5) to the cases of \(\beta _0=\infty \) and, additionally, either \(\beta _1=0\) (mixed Dirichlet/Neumann conditions) or \(\beta _1=\infty \) (both Dirichlet conditions): We will denote these configurations by \(J_0\) and \(J_1\), respectively, throughout this article (Fig. 1).

The graph \(J_0\) (left) and the graph \(J_1\) (right); Dirichlet conditions are imposed at the white vertices
We immediately see that the torsion function on \(J_0\) is
and
whereas the torsion function on \(J_1\) is given by
and
We observe that the maximum of the torsion function on \(J_0\) (resp., on \(J_1\)) is \(\frac{a^2}{2}\) \(\left( \mathrm {resp.,} \frac{a^2}{8}\right) \!;\) however, the product of the lowest Laplacian eigenvalue \(\lambda _1\) with the maximum of the torsion function is scale invariant and satisfies
Also, let us observe that the quotient of the ground state \(\varphi =\sin (\frac{\pi }{a}\cdot )\) and the torsion function v satisfies on \(J_1\) the estimate
(2) If \(\Omega \subset \mathbb {R}\) is a bounded but disconnected set, then its torsional rigidity is the sum of its connected components’ torsional rigidity: the torsional rigidity of such a disconnected domain is thus strictly lower than that of the interval with same total length. The same is clearly true of disconnected graphs.
(3) Let \({\mathcal {S}}_k\) be an equilateral metric star with Dirichlet conditions imposed on all vertices but the central one (or, equivalently, a pumpkin graph with Dirichlet conditions on one vertex and natural conditions on the other one) (Fig. 2).

A star graph with 5 edges: Dirichlet conditions are imposed at the white vertices
Let \(\textsf{e}_1,\ldots ,\textsf{e}_k\) denote the edges of \({\mathcal {S}}_k\). Each edge \(\textsf{e}_j\) will be identified with the interval \([0,\frac{|{\mathcal {S}}_k|}{k}]\) where \(0\) corresponds to the degree \(1\) vertex and \(\frac{|{\mathcal {S}}_k|}{k}\) corresponds to the center vertex respectively. It is then immediate to check that the torsion function \(v\) on \({\mathcal {S}}_k\) is given by
for all \(x_{\textsf{e}_j}\in [0,\frac{|{\mathcal {S}}_k|}{k}]\simeq \textsf{e}_j\) and \(j=1,\ldots ,k\). Thus, the torsional rigidity of \({\mathcal {S}}_k\) is
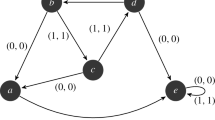
(4) Let \(\mathcal {G}\) be a lasso graph consisting of a pendant edge \(\textsf{e}_1\) of length \(\ell _1\) and a loop \(\textsf{e}_2\) of length \(\ell _2\), see Fig. 3, with Dirichlet conditions imposed on the vertex of degree 1.

The lasso graph
The torsion function v is necessarily given by
imposing the boundary conditions allows us to determine the coefficients \(a_1,a_2,b_1,b_2\), thus concluding that the torsion function is
unsurprisingly, the maximum
is attained at the midpoint of \(\textsf{e}_2\), i.e., at the point of maximal distance from the Dirichlet vertex. A direct computation shows that the torsional rigidity is
This procedure will be generalized in the next Section.
3 Reduction to a discrete problem
Let us now show how the computation of a metric graph’s torsion can be reduced to the computation of the solution of an algebraic system of \(|\textsf{V}|-|{{\textsf{V}_{\textrm{D}}}}|\) equations, as sketched already in [21, Section 4]. In fact, we will see that the metric torsion and torsional rigidity can be rewritten via discrete counterparts assigned to a corresponding weighted combinatorial graph, see Definition 3.3 below.
Proposition 3.1
Let \(v\) be the torsion function of \(\mathcal {G}\). Then the restriction \(g:=v_{|\textsf{V}}:\textsf{V}\rightarrow {\mathbb {R}}\) is the unique solution of the system
where \(d_\textsf{v}^\ell :=\sum _{\textsf{e}\in \textsf{E}_\textsf{v}}\ell _\textsf{e}\) denotes the metric degree of the vertex \(\textsf{v}\).
In view of (3.2) below, Proposition 3.1 shows that solving (3.1) immediately delivers a closed-form expression for the torsion function. Albeit elementary, this observation seems to be novel: for example, the authors of [32] regret that
[...] except in rare cases of high symmetry, the torsion function [...] [is] only computationally known.
See Example 3.10 for a class of (rather asymmetrical) graphs whose (discrete and, hence, also continuous) torsion functions can be easily computed.
Proof
Since the torsion function \(v\) solves the equation \(-v_\textsf{e}''=1\) edgewise, it satisfies
Then
holds. Therefore, the natural vertex conditions imposed on the elements \(\textsf{v}\in \textsf{V}{\setminus } {{\textsf{V}_{\textrm{D}}}}\) yield for the restriction of v to \({\textsf{V}_{\textrm{N}}}\)
This concludes the proof. \(\square \)
We can interpret the left-hand-side of the system considered in Proposition 3.1 as a self-adjoint operator in a weighted \(\ell ^2\)-space. First, let \({\textsf{E}_{\textrm{N}}}\) denote the set of edges in \(\textsf{E}\) whose incident vertices \(\textsf{v},\textsf{w}\) are both elements of \({\textsf{V}_{\textrm{N}}}\), and let \({\textsf{E}_{\textrm{D}}}\) denote the set of edges where at least one incident vertex is a Dirichlet vertex, i.e., \({\textsf{E}_{\textrm{D}}}:=\textsf{E}{\setminus } {\textsf{E}_{\textrm{N}}}\). We consider vertex and edge weights \(m, \mu \) defined as follows:
These weights have extensively discussed in [25, 37, 51], in the context of spectral theory of quantum graphs. We refer to \(\textsf{G}=\textsf{G}_{m,\mu }\) constructed above as the weighted combinatorial graph underlying the metric graph \(\mathcal {G}\).
Furthermore, we consider the non-negative discrete potential \(c:{\textsf{V}_{\textrm{N}}}\rightarrow [0,\infty )\) defined by
On the weighted Hilbert space \(\ell ^2_m({\textsf{V}_{\textrm{N}}})\) of square summable functions \(f:{\textsf{V}_{\textrm{N}}}\rightarrow {\mathbb {C}}\) whose inner product is given by
we consider the quadratic form \(q=q_{m,\mu ,c}\) given by
The positive definite (in particular, invertible), self-adjoint operator \({\mathcal {L}}\) on \(\ell _m^2({\textsf{V}_{\textrm{N}}})\) associated with \(q\) is given by
The following result is an immediate consequence of Proposition 3.1.
Corollary 3.2
If \(v\) is the torsion function of \(\mathcal {G}\), then \(v_{|{\textsf{V}_{\textrm{N}}}}=\frac{1}{2}{\mathcal {L}}^{-1}\textbf{1}_{{\textsf{V}_{\textrm{N}}}}\) holds.
Definition 3.3
Given a metric graph \(\mathcal {G}\), we will refer to \(g:={\mathcal {L}}^{-1}\textbf{1}_{{\textsf{V}_{\textrm{N}}}}\) as the discrete torsion function of the underlying weighted combinatorial graph \(\textsf{G}\). Its \(\ell _m^1\)-norm will be called the discrete torsional rigidity
As in the continuous case, it is straightforward to derive the variational characterization
where the discrete torsion function is—up to rescaling—the unique maximizer of the functional appearing on the right-hand-side.
Lemma 3.4
The discrete torsion function \(g={\mathcal {L}}^{-1}\textbf{1}_{{\textsf{V}_{\textrm{N}}}}\) is strictly positive on \({\textsf{V}_{\textrm{N}}}\).
Proof
Let \(\textsf{v}_{\min }\) be a vertex in \({\textsf{V}_{\textrm{N}}}\) with \(g(\textsf{v}_{\min })\le g(\textsf{v})\) for all \(\textsf{v}\in {\textsf{V}_{\textrm{N}}}\). Then, by definition of \(g\), we have
Since \(c\) is non-negative on \({\textsf{V}_{\textrm{N}}}\), we obtain \(g(\textsf{v}_{\min })>0\) and thus \(g\) is strictly positive on \({\textsf{V}_{\textrm{N}}}\). \(\square \)
As an immediate consequence of (3.2) and Lemma 3.4 we obtain:
Corollary 3.5
The torsion function \(v\) on \({\mathcal {G}}\) is strictly positive on \({\mathcal {G}}{\setminus }{{\textsf{V}_{\textrm{D}}}}\).
Let us now collect a few properties of the torsion function, for the sake of future reference.
Lemma 3.6
The torsion function is a Lipschitz continuous over the metric space \(\mathcal {G}\). It is edgewise strictly concave and has no local minima outside \({{\textsf{V}_{\textrm{D}}}}\).
Proof
Because the torsion function satisfies edgewise \(-v_\textsf{e}''=\textbf{1}\), and because it is twice (in fact, infinitely often) differentiable in the interior of each edge, we conclude from (3.2) that it is edgewise a strictly concave function; any critical point of v in the interior of an edge would then necessarily be a strict local maximum, rather than a minimum.
Would a local minimum of v occur instead at a vertex \(\textsf{v}\in \textsf{V}\), then v would be strictly monotonically increasing, in a neighborhood of \(\textsf{v}\), along all outgoing edges: hence the normal derivatives at \(\textsf{v}\) would all be strictly positive: a contradiction to the fact that v lies in the domain of \(\Delta _{\mathcal {G}}\) and, thus, satisfies the Kirchhoff-type condition.
Finally, it follows from Lemma 3.7 below that v is Lipschitz continuous. \(\square \)
In order to complete the proof of Lemma 3.6, we need the following fact: it is probably already known, but we could not find it in the literature.
Lemma 3.7
Under the Assumptions 2.1, the space
is continuously embedded in the space \(\textrm{Lip}(\mathcal {G})\) of Lipschitz continuous functions over the metric space \(\mathcal {G}\).
Proof
Let \(u\in W^{1,\infty }(\mathcal {G})=C(\mathcal {G})\cap \bigoplus _{\textsf{e}\in \textsf{E}} W^{1,\infty }(0,\ell _\textsf{e})\). Let \(x,y\in \mathcal {G}\) and let \(\gamma \) be a path in \(\mathcal {G}\) connecting \(x\) and \(y\). We then have
where \(L(\gamma )\) denotes the length of \(\gamma \). Since \(\gamma \) is arbitrary, we obtain
Therefore, \(W^{1,\infty }(\mathcal {G})\) is continuously embedded in \(\textrm{Lip}(\mathcal {G})\). This however already yields the assertion, because the embedding \(H^2\hookrightarrow W^{1,\infty }\) is continuous edgewise. \(\square \)
Remark 3.8
-
(1)
Trivially, Lemma 3.7 also implies that all eigenfunctions of self-adjoint realizations of metric graph Laplacians (or, in fact, Schrödinger operators) with continuity and/or Dirichlet conditions at all vertices are Lipschitz continuous functions. Remarkably, this is also true of the heat kernel of \((\textrm{e}^{t\Delta _{\mathcal {G}}})_{t\ge 0}\) with respect to each of its two spacial variables. (Observe that joint Hölder continuity (with exponent \(\frac{1}{2}\)) of the heat kernel has been recently proved in [36, Theorem 5.2].)
-
(2)
Observe that Lemma 3.7 also extends to infinite metric graphs, as the proof merely uses that \(\mathcal {G}\) is a length space.
The following result bridges the distance between the torsional rigidity of metric and underlying weighted combinatorial graphs.
Theorem 3.9
The discrete and metric torsional rigidity are related via the formula
Proof
Let \(v\) be the torsion function of \(\mathcal {G}\) and let \(g\) be the discrete torsion function of \(\textsf{G}\). By Corollary 3.2 we have \(v_{|{\textsf{V}_{\textrm{N}}}}=\frac{1}{2}g\). Then, using (3.2) we obtain
with
cf. (2.7), and
This completes the proof. \(\square \)
Example 3.10
Let \(\mathcal {G}\) be a stower graph, i.e. the edge set \(\textsf{E}\) consists of a finite number of loops (the petals) and leaves, all of them connected to a single center vertex \(\textsf{v}_c\)—see Fig. 4.

A stower graph with \(|\textsf{E}_p|=3\) petals and \(|\textsf{E}_l|=5\) leaves: Dirichlet conditions are imposed at the white vertices
Let \(\textsf{E}_p\) denote the set of petals and \(\textsf{E}_l\) denote the set of leaves. We impose Dirichlet conditions at all of the leaf vertices; in particular \({\textsf{V}_{\textrm{N}}}=\{\textsf{v}_c\}\) and, in our notation, \(\textsf{E}_l={\textsf{E}_{\textrm{D}}}\) and \(\textsf{E}_p={\textsf{E}_{\textrm{N}}}\). The vertex weight \(m\) and discrete potential \(c\) associated with \(\mathcal {G}\) are given by
and thus the discrete torsion function \(g\) and the discrete torsional rigidity are given by
and
Therefore, by Theorem 3.9, the torsional rigidity of the stower graph is
in particular, in the equilateral case we find
(Observe that we recover Example 2.4.(3) in the case of \(\textsf{E}_p=\emptyset \).)
Because \(g(\textsf{v}_c)\) is explicitly known, the torsion function v can be written down explicitly, much like in the case of the lasso graph in Example 2.4.(4).
3.1 A Hadamard-type formula
As an application of the above results on the discrete torsion function, let us conclude this section by studying the behavior of the torsion function and torsional rigidity under perturbation of the graph’s edge lengths. We fix one edge \(\textsf{e}_0\in \textsf{E}\). For \(s>0\), we consider the perturbed graph \(\mathcal {G}_s\) with the same topology as \(\mathcal {G}\) and whose edge lengths \((\ell _{s,\textsf{e}})_{\textsf{e}\in \textsf{E}}\) are given by
i.e., the lengths of the edges \(\textsf{e}\ne \textsf{e}_0\) are fixed, while the lengths of the edge \(\textsf{e}_0\) is variable, and for \(s=\ell _{\textsf{e}_0}\) we obtain our original graph \(\mathcal {G}\). For \(s>0\), the torsion on \(\mathcal {G}_s\) will be denoted by \(v_s=(v_{s,\textsf{e}})_{\textsf{e}\in \textsf{E}}\).
Analogously to known Hadamard-type formulas for eigenvalues for Laplacians on metric graphs (see [28, Proof of the Lemma], [20, Appendix A], and [3, Lemma 5.2]), we can derive a Hadamard-type formula for the torsional rigidity of metric graphs:
Proposition 3.11
The map \((0,\infty )\ni s\mapsto T(\mathcal {G}_s)\) is continuously differentiable and its derivative in \(s=\ell _{\textsf{e}_0}\) is given by
where \(v\) is the torsion on \(\mathcal {G}\) and \(x\) is an arbitrary element of \(\textsf{e}_0\). (In particular, the right-hand-side in (3.10) does not depend on the particular choice of \(x\in \textsf{e}_0\).)
Proof
We first observe that the right-hand-side in (3.10) is independent of \(x\in \textsf{e}_0\simeq [0,\textsf{e}_0]\), since
where we used that the torsion satisfies the equation \(-v''={{\textbf{1}}}\) edgewise.
Next, we establish that \((0,\infty )\ni s\mapsto T(\mathcal {G}_s)\) is indeed continuously differentiable. For that purpose, let \({\mathcal {L}}_s\) be the discrete operator defined via (3.4) associated with the metric graph \(\mathcal {G}_s\) and let \(g_s={\mathcal {L}}_s^{-1}{\textbf{1}}_{{\textsf{V}_{\textrm{N}}}}\) be the associated discrete torsion. Since the entries of \({\mathcal {L}}_s\) with respect to the canonical basis of \({\mathbb {R}}^{{\textsf{V}_{\textrm{N}}}}\) are continuously differentiable functions of \(s\) it follows from Cramer’s rule that the \(g_s(\textsf{v})\) is a continuously differentiable function of \(s\). Therefore (3.5) yields that \((0,\infty )\ni s\mapsto T(\mathcal {G}_s)\) is continuously differentiable. We obtain even more: by Corollary 3.2 we have \(v_{s|{\textsf{V}_{\textrm{N}}}}=g_s\). It thus follows from (3.2) and (3.3) that for each edge \(\textsf{e}\in \textsf{E}\) and each \(x_\textsf{e}\in \textsf{e}\simeq [0,\ell _{s,\textsf{e}}]\) both \(v_{s,\textsf{e}}(x_\textsf{e})\) and \(v_{s,\textsf{e}}'(x_\textsf{e})\) are continuously differentiable functions of \(s\).
Our next aim is to derive (3.10). Note that it suffices to derive it for one point on \(\textsf{e}_0\). We first recall that the torsion \(v_s\) satisfies
Using the Leibniz rule we find
and
where we used \(-\Delta _{\mathcal {G}_s}v_{s}={\textbf{1}}_{\mathcal {G}_s}\) in the last step. Now, for \(\textsf{e}\in \textsf{E}\), we have
Using the boundary conditions imposed at the vertices of \({\mathcal {G}}_s\) we obtain
We infer that
Using (3.11), (3.12) and (3.13), we finally obtain
which proves the asserted equation. \(\square \)
4 Torsional surgery and inverse problems
The variational characterization of \(T(\mathcal {G})\) in (2.4) paves the way to the application of surgery methods, similar to what has been systematically done for the ground-state energy since [48]; for instance we can easily derive the following useful surgery principles.
Proposition 4.1
Suppose \(\mathcal {G}\) is a metric graph satisfying Assumption 2.1. Then the following assertions hold.
-
(1)
[Gluing vertices] If \(\widetilde{\mathcal {G}}\) is obtained from \(\mathcal {G}\) by gluing two different vertices \(\textsf{v}\ne \textsf{w}\) in \({\textsf{V}_{\textrm{N}}}\), then \(T(\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\le T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) with equality if and only if the torsion \(v\) on \(\mathcal {G}\) satisfies \(v(\textsf{v})=v(\textsf{w})\).
-
(2)
[Imposing Dirichlet conditions on additional vertices] If \(\textsf{v}\not \in {{\textsf{V}_{\textrm{D}}}}\), then \(T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}}\cup \{\textsf{v}\})< T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\).
-
(3)
[Attaching pendant graphs with no Dirichlet vertices] If \(\widetilde{\mathcal {G}}\) is formed by attaching a pendant graph \(\widetilde{\mathcal {G}}{\setminus } \mathcal {G}\) at only one vertex \(\textsf{v}\in {\textsf{V}_{\textrm{N}}}\) of \(\mathcal {G}\), and if no Dirichlet conditions are imposed on \(\widetilde{\mathcal {G}}{\setminus } \mathcal {G}\), then \(T(\mathcal {G}) \le T(\widetilde{\mathcal {G}})\).
-
(4)
[Adding edges between points where the torsion function attains the same value] If \(\widetilde{\mathcal {G}}\) is obtained from \(\mathcal {G}\) by adding an edge \(\textsf{e}=\textsf{v}'\textsf{v}''\) between two vertices \(\textsf{v}',\textsf{v}''\) of \(\mathcal {G}\), then \(T(\mathcal {G})\le T(\widetilde{\mathcal {G}})\) provided the torsion function of \(\mathcal {G}\) attains the same value on both \(\textsf{v}',\textsf{v}''\).
-
(5)
[Lengthening edges] If \(\widetilde{\mathcal {G}}\) is obtained from \(\mathcal {G}\) by lengthening one edge, then \(T(\mathcal {G}) < T(\widetilde{\mathcal {G}})\).
-
(6)
[Scaling the whole graph] If \( \widetilde{\mathcal {G}}\) is obtained from \( \mathcal {G}\) by scaling each edge with the factor \(c>0 \), then \(T (\mathcal {G}) = c^{-3} T (\widetilde{\mathcal {G}})\).
-
(7)
[Unfolding parallel edges] Let \(\textsf{e}_1,\textsf{e}_2\) be two parallel edges with common endpoints \(\textsf{v}_1,\textsf{v}_2\in \textsf{V}\). If \(\widetilde{\mathcal {G}}\) is obtained from \(\mathcal {G}\) by replacing \(\textsf{e}_1,\textsf{e}_2\) with a single edge \(\textsf{e}_0\) of length \(\ell _{\textsf{e}_0} = \ell _{\textsf{e}_1}+\ell _{\textsf{e}_2}\), then \(T(\widetilde{\mathcal {G}})> T(\mathcal {G})\).
These surgery principles are taken over from [33, Lemma 2.3] and [10, Theorem 3.18.(2)], where they were developed to prove similar relations for the eigenvalues of modified metric graphs. The proof of the items in Proposition 4.1 is very similar to that of their eigenvalue counterparts, up to replacing the role of the respective eigenfunctions by the torsion, but we prefer to formulate it for the sake of self-containedness.
Proof
-
(1)
For the inequality, we only need to observe that \(H^1_0(\widetilde{\mathcal {G}})\) may be identified with the subspace (of codimension 1) that consists of functions in \(H^1_0(\mathcal {G})\) that coincide in \(\textsf{v}\) and \(\textsf{w}\). For the characterization of equality observe first that \(v(\textsf{v})=v(\textsf{w})\) yields that \(v\) is an admissible test function in the variational characterization of \(T(\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\) which yields \(T(\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\ge T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\). If, on the other hand, \(T(\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\ge T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) holds, then the torsion \({\tilde{v}}\) on \(\widetilde{\mathcal {G}}\) considered as an element of \(H^1_0(\mathcal {G})\) maximizes the Polyá quotient on \(\mathcal {G}\). Therefore, \({\tilde{v}}\) has to be a scalar multiple of \(v\) which implies \(v(\textsf{v})=v(\textsf{w})\).
-
(2)
Likewise, here we observe that \(H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}}\cup \{\textsf{v}\})\) is a subspace of \(H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\). Moreover, the inequality has to be strict, since the torsion on \(\mathcal {G}\) with respect to the smaller Dirichlet vertex set \({{\textsf{V}_{\textrm{D}}}}\) has to be strictly positive in \(\textsf{v}\) by Corollary 3.5 and equality would yield that the torsion \({\tilde{v}}\) with respect to the larger Dirichlet vertex set \({{\textsf{V}_{\textrm{D}}}}\cup \{\textsf{v}\}\) has to be a scalar multiple of \(v\) in contradiction to \({\tilde{v}}(\textsf{v})=0\).
-
(3)
Let v be the torsion function of \(\mathcal {G}\) and hence the maximizer of the Pólya quotient, and suppose that we obtain \( \widetilde{\mathcal {G}}\) by attaching a pendant graph to a vertex \( \textsf{v}\in \mathcal {G}\). We extend v to a function \({\tilde{v}}\in H_0^1(\widetilde{\mathcal {G}})\) by setting \({\tilde{v}}\equiv v(\textsf{v})\) on \(\widetilde{\mathcal {G}}{\setminus } \mathcal {G}\). Then v is a valid test function for \(T(\widetilde{\mathcal {G}})\), whose Pólya quotient is not smaller than \(T(\mathcal {G})\).
-
(4)
Like in the proof of (3), extending on the new edge \(\textsf{e}\equiv \textsf{v}'\textsf{v}''\) the torsion function v of \( \mathcal {G}\) by a constant equal to the common value \( v(\textsf{v}') = v (\textsf{v}'') \) yields a test function for \( \widetilde{\mathcal {G}}\) whose Pólya quotient is not smaller than \(T(\mathcal {G})\).
-
(5)
This is a direct consequence of Proposition 3.11.
-
(6)
The proof follows essentially (5). One needs to take into account that all edges are scaled with the same factor.
-
(7)
Let v be the torsion function of \(\mathcal {G}\). Suppose without loss of generality that \(v_{|\textsf{e}_1\cup \textsf{e}_2}\) reaches its maximum \(M>0\) at some point in \(\textsf{e}_1\), say \(x_0 \in [0,\ell _{\textsf{e}_1}]\). We define a test function \(\tilde{v}\) on \(\widetilde{\mathcal {G}}\) by \(\tilde{v} = v\) on \(\widetilde{\mathcal {G}}{\setminus } \textsf{e}_0\), and, identifying \(\textsf{e}_0\) with the interval \([0,\ell _{\textsf{e}_0}]\),
$$\begin{aligned} \tilde{v} (x):= {\left\{ \begin{array}{ll} v|_{\textsf{e}_1} (x), &{}\quad x \in [0,x_0],\\ M, &{}\quad x \in (x_0,x_0+\ell _{\textsf{e}_2}),\\ v|_{\textsf{e}_1}(x+\ell _{\textsf{e}_2}), &{}\quad x \in [x_0+\ell _{\textsf{e}_2},\ell _{\textsf{e}_1}]. \end{array}\right. } \end{aligned}$$One sees that \(\tilde{v} \in H^1_0 (\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\), hence it is a valid test function for the Pólya quotient. Additionally, we see that
$$\begin{aligned} \begin{aligned} \int _{\widetilde{\mathcal {G}}} |\tilde{v}'|^2\,\textrm{d}x&\le \int _{{\mathcal {G}}} |v'|^2\,\textrm{d}x\quad \hbox {and}\quad \int _{\widetilde{\mathcal {G}}} |\tilde{v}|\,\textrm{d}x&\ge \int _{{\mathcal {G}}} |v|\,\textrm{d}x, \end{aligned} \end{aligned}$$from which \(T(\tilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})>T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) follows. The strictness of the inequality follows by noting that in each case we have constructed a test function \(\tilde{v}\) that cannot be a scalar multiple of the torsion, since \(\tilde{v}\) is equal to a nonzero constant on a subgraph of positive measure. Since the torsion function is the only admissible test function in \(H^1_0(\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\) whose Pólya quotient amounts to \(T(\widetilde{\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\), this proves the assertion. \(\square \)
Remark 4.2
Proposition 4.1.(1) can arguably solve a quantum version of Braess paradox. In its original form in [12], the latter states that the efficiency of a traffic network may counterintuitively decrease upon opening a new road; over the decades, it has been theoretically demonstrated and observed in action in many different fields. In the context of diffusion on quantum graphs, it can be reasonably formulated as follows:
The heat kernel may be strictly increasing upon increasing the connectivity of a metric graph \(\mathcal {G}\) by gluing two points.
This is due to the fact that the heat kernel on \(\widetilde{\mathcal {G}}\) (the metric graph arising by gluing two points of \(\mathcal {G}\)) is not dominated by the heat kernel on \(\mathcal {G}\); indeed, the former is not even eventually dominated by the latter, as observed in [30]. So, at any time t there are two points \(x_t,y_t\) in the metric graph that observe a decrease in diffusion features: in probabilistic terms, the odds of reaching \(x_t\) from \(y_t\) within t decrease in the new graph configuration. This is perhaps unexpected, given that by [10, Thm. 3.4] the k-th eigenvalue of \(\widetilde{\mathcal {G}}\) is not larger than the k-th eigenvalue of \(\mathcal {G}\), for \(k=2\) (so convergence to equilibrium is not slower in the new configuration) and in fact for any further k, too. What Proposition 4.1.(1) shows is that, when integrated in time and space as in (1.6), these pathological effects are indeed negligible.
As a consequence of Proposition 4.1 we mention the following lemma, which can be proved like [33, Lemma 5.4]. It will be used to derive an estimate for the torsional rigidity in terms of the inradius \({{\,\textrm{Inr}\,}}(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) of \(\mathcal {G}\) with respect to \(|{{\textsf{V}_{\textrm{D}}}}|\), i.e.,
where
and \(d_{{\mathcal {G}}}\) denotes the path metric on \({\mathcal {G}}\).
Lemma 4.3
Given any compact, connected, non-empty metric graph \(\mathcal {G}\), there exists a pumpkin chain \(\widetilde{\mathcal {G}}\) such that the following holds:
-
(1)
Exactly one of the outside vertices of \(\widetilde{\mathcal {G}}\) is a Dirichlet vertex. The degree of said Dirichlet vertex is equal to \(\#{{\,\textrm{Dir}\,}}(\mathcal {G})\).
-
(2)
\({{\,\textrm{Inr}\,}}(\widetilde{\mathcal {G}}) = {{\,\textrm{Inr}\,}}(\mathcal {G})\), \(|\widetilde{\mathcal {G}}| \le |\mathcal {G}|\) and \(|{\textsf{V}_{\textrm{N}}}(\widetilde{\mathcal {G}})| \le |{\textsf{V}_{\textrm{N}}}(\mathcal {G})|+1\);
-
(3)
\(T(\widetilde{\mathcal {G}}) \le T(\mathcal {G})\).
Proof
After gluing all vertices in \({{\textsf{V}_{\textrm{D}}}}({\mathcal {G}})\) we may assume that there is exactly one Dirichlet vertex \(\textsf{v}_0\) in \({\mathcal {G}}\) whose degree is \(\#{{\,\textrm{Dir}\,}}(\mathcal {G})\). Since \({\mathcal {G}}\) is compact there exists some \(x\in {\mathcal {G}}\) so that \({{\,\textrm{Inr}\,}}(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})=d_{\mathcal {G}}(\textsf{v}_0,x)\). Then, following the algorithm used in the proof of [33, Lemma 5.4] and using Proposition 4.1, one can construct a pumpkin chain as stated. \(\square \)
We refer to [33, Definition 5.3] for a formal introduction of pumpkin chains, which can be visualized as a concatenation of pumpkin graphs, see Fig. 5.

A pumpkin chain
We are finally in the position to prove our main lower estimate on \(T(\mathcal {G})\) in terms of the inradius of \(\mathcal {G}\).
Proposition 4.4
Suppose \(\mathcal {G}\) is a metric graph satisfying Assumption 2.1. Then the torsional rigidity with respect to an arbitrary Dirichlet vertex set \(\emptyset \ne {{\textsf{V}_{\textrm{D}}}}\subset \textsf{V}\) admits the lower bound
Proof
For the sake of notational simplicity, let us denote by \(|{\textsf{V}_{\textrm{N}}}|\) the number of non-Dirichlet vertices. By Lemma 4.3 it is sufficient to prove the estimate
for any pumpkin chain \({\mathcal {G}}\) where Dirichlet conditions are imposed on exactly one extremal vertex \(\textsf{v}_0\). For such a pumpkin chain, beginning from the Dirichlet vertex, let \(\textsf{v}_0,\textsf{v}_1,\ldots ,\textsf{v}_m\) denote the vertices of \({\mathcal {G}}\) where \(m=|{\textsf{V}_{\textrm{N}}}|\) and let \(\ell _j\) denote the length of the edges connecting \(\textsf{v}_{j-1}\) and \(\textsf{v}_j\). Then
holds and thus, by the pigeonhole principle, there exists some \(k\) with \(\ell _k\ge \frac{{{\,\textrm{Inr}\,}}(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})}{m}\). We now consider the following test function \(u\) on \({\mathcal {G}}\): on an edge \(\textsf{e}\simeq [0,\ell _j]\) connecting \(\textsf{v}_{j-1}\) and \(\textsf{v}_j\) we set \(u(x)=0\) if \(1\le j <k\), \(u(x)=\frac{1}{2}x(2\ell _j-x)\) if \(j=k\), and \(u(x)=\frac{\ell _k^2}{2} \) if \(k< j\le m\). Then, it is immediate to check that the Pólya quotient of \(u\) is bounded from below by \(\frac{{{\,\textrm{Inr}\,}}({\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})^3}{3|{\textsf{V}_{\textrm{N}}}|^3}\). Therefore, using (2.3) yields the asserted estimate. \(\square \)
If \(\mathcal {G}\) is a tree, then the previous estimate can be sharpened.
Proposition 4.5
Let \(\mathcal {G}\) be a metric graph satisfying Assumption 2.1. Let, additionally, \(\mathcal {G}\) be a tree.
If \(\textsf{G}\) has precisely one Dirichlet vertex, then
If \(\textsf{G}\) has precisely two Dirichlet vertices \(\textsf{v},\textsf{w}\), then
Proof
Since \(\textsf{G}\) is a tree, we can by Proposition 4.1 recursively prune it—only lowering its torsion function, ending up with a path graph whose length is \({{\,\textrm{Inr}\,}}({\mathcal {G}};{{\textsf{V}_{\textrm{D}}}})\) or \({{\,\textrm{dist}\,}}(\textsf{v},\textsf{w})\), respectively. Now the claim follows by Example 2.4. \(\square \)
We have seen in Example 2.4 that the torsional rigidity of open subsets of \(\mathbb {R}\) can be explicitly computed. An interval is, of course, just a very elementary metric graph. Owing to Proposition 4.1 we can extend (2.7) and (2.6) to an estimate valid for all metric graphs: the following is the metric graph counterpart of the celebrated Saint-Venant inequality for domains.
Theorem 4.6
For any metric graph \(\mathcal {G}\) one has
the inequality is actually an equality if and only if \(\mathcal {G}\) is an interval with mixed Dirichlet/Neumann conditions.
If, additionally, \(\mathcal {G}\) is doubly connected upon gluing all vertices in \({{\textsf{V}_{\textrm{D}}}}\), then we have the improved estimate
in this case, the inequality is actually an equality if and only if \(\mathcal {G}\) is a caterpillar graph.
We recall that a caterpillar graph is a 2-regular pumpkin chain where one of the two endpoints (of degree two) is equipped with Dirichlet conditions, see Fig. 6. Note that the torsional rigidity of a caterpillar graph of length \(|\mathcal {G}|\) is indeed \(\frac{|\mathcal {G}|^3}{12}\). This follows from Proposition 4.1(1), (2.7), and the fact that the torsion on an interval with Dirichlet conditions imposed at both end points is symmetric with respect to the center point of the interval.

A caterpillar graph: we recall that, as far as spectral or torsional properties are concerned, gluing Dirichlet vertices makes no difference
In the case of planar domains, this result was proved in [52, Section 5] using a method based on Steiner symmetrization. We, too, will use a rearrangement method, but in this case we will rather follow an approach first proposed in [28] and closer in spirit to Schwarz symmetrization.
Proof
First of all, take the torsion function v and observe that each value t between its minimum 0 and its maximum \(\Vert v\Vert _\infty \) is attained n(t) times along \(\mathcal {G}\), where
-
\(n(t)\ge 1\), since v is continuous on the metric space \(\mathcal {G}\);
-
\(n(t)\ge 2\) for all \(t\in [0,\Vert v\Vert _\infty ]{\setminus } v(\textsf{V})\) if \(\mathcal {G}\) is doubly connected, as one sees adapting (with very minor modifications) the proof of [17, Lemma 3.7].
Now, define the symmetrized version \(v^*\) of the torsion function v as in the proof of [28, Lemma 3]: letting \(m_v(t)\) be the measure of the superlevel set \(\{x\in \mathcal {G}:v(x)>t\}\) we can uniquely define a new function \(v^*\in H^1(0,|\mathcal {G}|)\) in such a way that \(v^*(0)=v(0)\), \(v^*\) is monotonically increasing, and \(m_v(t)=m_{v^*}(t)\) for a.e. \(t\in [0,\Vert v\Vert _\infty ]\). Then one checks as in the proof of [3, Theorem 2.1] that
see [3, equation (3.13)]. On the other hand, by Cavalieri’s principle
for all \(p\ge 1\). It follows in particular that
because \(v^*\) is an admissible test function for the Pólya quotient of the interval \((0,|\mathcal {G}|)\) with mixed Dirichlet/Neumann conditions, this yields the asserted estimates (4.4) and (4.5). Now as in the proof of [17, Lemma 4.3] equality in (4.4) yields \(n(t)=1\) for all \(t\in [0,\Vert v\Vert _\infty ]\) while equality in (4.5) yields \(n(t)=2\) for all \(t\in [0,\Vert v\Vert _\infty ]{\setminus }\psi (\textsf{V})\) from which we infer the claimed characterizations on equality in (4.4) and (4.5) respectively. \(\square \)
Remark 4.7
(1) Theorem 4.6 is the metric graph counterpart of a celebrated isoperimetric inequality, which for domains was conjectured by Saint-Venant and eventually proved in [52]. Let us remark that Makai provided in [42] a different proof, which in turn yields an estimate in terms of volume and inradius: in our case, a hypothetical Makai-type inequality would read \( T(\mathcal {G})<4|\mathcal {G}|{{\,\textrm{Inr}\,}}(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})^2\), but we have not been able to prove it.
(2) The upper estimate in Theorem 4.6 does not have a lower counterpart. To see this, let \(\mathcal {G}_n\) be the graph consisting of n disjoint intervals of length \(n^{-1}\), each with Dirichlet conditions at both endpoints. Then
(3) Let us stress that (4.4) can be regarded as a Faber–Krahn-type inequality: it states that
where \(J_0\) is the path graph with mixed Dirichlet/Neumann conditions; equality holds if and only if \(\mathcal {G}=J_0\) (up to isomorphism). Likewise, if \(\mathcal {G}\) is doubly connected after gluing all vertices in \({{\textsf{V}_{\textrm{D}}}}\), then by (4.5)
where if \(J_1\) is the path graph with both Dirichlet conditions; equality if and only if \(\mathcal {G}=J_1\) (up to isomorphism).
The variational formulation (2.4) makes it possible to derive lower estimates on \(T(\mathcal {G})\): for instance, the distance function
is an admissible test function for the Pólya quotient. In fact, an even simpler test function is given by
where \(\textbf{1}_\textsf{e}\) is the characteristic function of the edge \(\textsf{e}\) and \(v_\textsf{e}\) is the torsion function of the individual edge \(\textsf{e}\equiv (0,\ell _\textsf{e})\) (with Dirichlet conditions imposed at all endpoints), i.e.,
the torsional rigidity of \(\mathcal {G}\) is not smaller than the Pólya quotient evaluated at \(\psi \), i.e.,
we know from Theorem 3.9 that the accuracy of this estimate is measured by the discrete torsion function \(T(\textsf{G})\).
By Jensen’s inequality, we deduce from (4.6) that
this estimate becomes an equality if and only if \(\mathcal {G}\) is an equilateral flower with Dirichlet conditions imposed in the (only) vertex (equivalently, if \(\mathcal {G}\) is a disconnected metric graph consisting of equilateral path graphs with Dirichlet conditions imposed at all endpoints): this is arguably the metric graph counterpart of Makai’s inequality
for convex planar domains \(\Omega \), see [40, 53].
The estimate (4.6) can indeed be improved. In Example 3.10 we have computed the torsional rigidity of stowers: this class of graphs will prove useful when proving the following lower bound.
Proposition 4.8
There holds
where \({\textsf{E}_{\textrm{D}}}\) is the set of edges incident to vertices in \({{\textsf{V}_{\textrm{D}}}}\); the inequality becomes an equality if \(\mathcal {G}\) is a stower graph.
Proof
The proof is similar to that of [33, Theorem 4.2]. First of all, we glue all vertices in \({\textsf{V}_{\textrm{N}}}\): by Proposition 4.1, this can only reduce the torsional rigidity. In this way we obtain a stower whose set of loop edges is \(\textsf{E}{\setminus } {\textsf{E}_{\textrm{D}}}\) and whose set of leaf edges is \({\textsf{E}_{\textrm{D}}}\). The estimate now immediately follows from (3.8). \(\square \)
5 Spectral estimates
In this section we are going to slightly change our viewpoint and study upper and lower bounds on products of (suitable powers of) the torsional rigidity and the ground-state energy in terms of metric quantities. Of course, this ansatz can still be understood as a kind of shape optimization assignment, but it additionally paves the road to the use of torsional rigidity as a spectral quantity in its own right, much like the Cheeger constant.
5.1 Upper estimates: Pólya–Szegö inequality
We being by observing that the product \(\lambda _1({\mathcal {G}})\) admits an upper bound only depending on the total length of \(\mathcal {G}\) and its torsional rigidity \(T({\mathcal {G}})\).
Proposition 5.1
For any subset \(\emptyset \ne {{\textsf{V}_{\textrm{D}}}}\subset {\textsf{V}}\), there holds
The corresponding estimate is well-known in the case of open domains \(\Omega \subset \mathbb {R}^d\): indeed, the proof in [54, Section 5.4] carries over verbatim to the case of metric graphs, yielding (5.1). We write it down for the sake of self-containedness.
Proof
Let v be the torsion function on \({\mathcal {G}}\). Because v is also a valid test function for the Rayleigh quotient, the stated inequality follows using the Cauchy–Schwarz inequality and the variational characterization of \(\lambda _1({\mathcal {G}})\) from
Indeed, the first inequality is strict, since equality in the Cauchy–Schwarz inequality
holds precisely if \(v'\) is a multiple of \(\textbf{1}\): this is not possible, since otherwise \(v''=0\), against the definition of torsion. \(\square \)
Remark 5.2
(1) Combining Proposition 5.1 and [50, Theorem 4.4.3] we get the upper bound
This is partially reminiscent of the inequality
in terms of the inradius \( {{\,\textrm{Inr}\,}}(\Omega )\) and volume \(|\Omega |\), proved by Makai for simply connected (\(\kappa =4\), with strict inequality) or convex (\(\kappa =\frac{4}{3}\)) domains \(\Omega \subset \mathbb {R}^2\) [41, 42]; see also [15, Section 6] for generalizations and historical remarks.
(2) Also, combining Propositions 4.4 and 5.1 we obtain the upper estimate
A lower estimate on \(\lambda _1({\mathcal {G}};\textsf{V}_{\textrm{D}})\) in terms of inradius for a special class of simply connected metric graphs (viz, metric trees with a center point) has been recently observed in [24].
Let us elaborate on this simple method: in analogy with the case of manifolds with non-empty boundary [19, 59], and following [55, Section 6], in the case of quantum graphs with non-empty Dirichlet vertex set \({{\textsf{V}_{\textrm{D}}}}\) the Cheeger constant we define the Cheeger constant \(h(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) of \(\mathcal {G}\) as
where the infimum is taken over all non-empty subgraphs \(\tilde{\mathcal {G}}\) with \({\tilde{\mathcal {G}}}\cap {{\textsf{V}_{\textrm{D}}}}=\emptyset \), and \(|\partial \tilde{\mathcal {G}}|\) is the number of points in the boundary of \(\tilde{\mathcal {G}}\). (A different definition for graphs without Dirichlet vertices appears in [48], but is not appropriate for our purposes.) A similar but more general result for domains is already known, see [16, Theorem 2].
Proposition 5.3
There holds
Proof
Again, let v be the torsion function on \({\mathcal {G}}\) and observe that, in particular, v is a function of bounded variation vanishing in the Dirichlet vertices of the quantum graph. Again, the stated inequality follows using the Cauchy–Schwarz inequality and the variational characterization of the Cheeger constant in [23, Theorem 6.1] from
Again, the first inequality is strict, since equality in the Cauchy–Schwarz inequality
holds precisely if \(v'\) is a multiple of 1: this is not possible, since the torsion function vanishes on \({{\textsf{V}_{\textrm{D}}}}\). \(\square \)
Different but comparable upper bounds for d-dimensional domains or manifolds can be found in [29, Corollary 2.5] and [18, Theorem 1.10].
Example 5.4
(1) It is unclear how sharp the estimate (5.1) is. For stars on k edges with natural conditions in the center and Dirichlet conditions in the leaves (and in particular for intervals with mixed Dirichlet/Neumann conditions, \(k=1\); or with both Dirichlet endpoints, \(k=2\)) we indeed have in view of Example 2.4.(3)
In the case of domains \(\Omega \subset \mathbb {R}^d\), \(d\ge 2\), the improved estimate
was proved in [9, Theorem 1.1], where \(\omega _d\) is the measure of the ball of unit radius in \(\mathbb {R}^d\). (However, again for \(d\ge 2\), by [9, Thm. 1.2] the quantity \(\frac{T(\Omega )\lambda _1(\Omega )}{|\Omega |}\) is known not to have a maximizer.)
For \(d=1\), the formal metric graph counterpart
in general, as one sees already considering the case of path graphs with either mixed or purely Dirichlet boundary conditions.
(2) Also the estimate (5.3) seems to be far from sharp. Again for the class of metric graphs considered in (1) (i.e., equilateral stars on k edges with natural conditions in the center and Dirichlet conditions in the leaves), we can reason as in [23, Example 6.3] and immediately see that \(h(\mathcal {G})=\frac{k}{|\mathcal {G}|}\): in view of Example 2.4.(3) we conclude that
(3) If, again, \(\mathcal {G}\) is equilateral, then combining Propositions 4.8 and 5.3 we deduce
this can be compared with the bound \(h(\mathcal {G})\le \frac{2|\textsf{E}|}{|\mathcal {G}|}\) observed in [34] for possibly non-equilateral quantum graphs without any Dirichlet vertices.
5.2 Lower estimates: Kohler-Jobin inequality
Like in [26] it can be proved that for any eigenfunction \(\varphi \) with associated eigenvalue \(\lambda \) of \(\Delta _{\mathcal {G}}\) the bound
holds. In Sect. 6, we provide a general framework to obtain this estimate and, in particular, a slightly sharper version, see Proposition 6.11.
A simple lower estimate on the ground-state energy \(\lambda _1(\mathcal {G})\) based on the torsion function can be easily deduced from (5.6), taking the supremum of both sides, see also Corollary 6.2 below.
Corollary 5.5
There holds
We have seen in Example 2.4.(1) that in the case of path graphs with one or two Dirichlet endpoints, the torsion function v and the lowest Laplacian eigenvalue \(\lambda _1\) satisfy \( \lambda _1 \Vert v\Vert _\infty =\frac{\pi ^2}{8}\simeq 1.2337 \). For domains, it was conjectured in [5] that \(\frac{\pi ^2}{8}\) is the optimal lower bound for the product \(\lambda _1\Vert v\Vert _\infty \).
Example 5.6
If \(\mathcal {G}\) is an equilateral star on k edges, then the estimate (5.7) yields, in view of Example 2.4.(3),
this can be compared with
cf. [17, Lemma 4.2] and [50, Theorem 4.4.3], which are worse for all \(k\ge 3\).
Remark 5.7
In the case where \((\lambda ,\varphi )\) is an eigenpair of a Schrödinger operator with a random potential, the inequality (5.6) is the starting point in Filoche’s and Mayboroda’s theory of landscape functions: it was interpreted in [26] as a means to control the localization of the eigenfunctions \(\varphi \) by means of the “landscape” of the torsion function v: i.e., \(\varphi \) may be large only in regions where so is v, and in fact it was numerically observed that the regions of localizations for eigenfunctions correspond very well, at low energies, with the regions enclosed by the “valleys” of v. The role of \(v\) as a landscape function in a more abstract setting will be further discussed in Sect. 6.
If one tries to carry over these ideas to our quantum graph setting, the valleys of the torsion function v are simply given by the discrete set of local minima of v. Unfortunately, by Lemma 3.6 there exist no local minima of the torsion function outside \({{\textsf{V}_{\textrm{D}}}}\): this seems to underpin the belief that the scope of the usage of torsion function as a landscape function for metric graphs is rather limited, as long as natural conditions are imposed outside \({{\textsf{V}_{\textrm{D}}}}\); in the last few years, the role of the “effective potential” \(\frac{1}{v}\) has been emphasized, instead, see [1, 32].
This section is devoted to prove a lower estimate of different flavor.
A breakthrough in the torsional theory of higher dimensional bodies came in the 1970s, when Kohler-Jobin could finally prove a sharp bound on the product of the torsional rigidity with the square of the ground-state energy: this bound, first conjectured by Pólya and Szegő in [54], fully established the torsional rigidity as a relevant quantity in spectral geometry and shape optimization. This section is devoted to derive a Kohler-Jobin-type estimate in the context of metric graphs.
While \(\frac{{\lambda _1(\mathcal {G})}T(\mathcal {G})}{|\mathcal {G}|}=\frac{\pi ^2}{12}\) for path graphs with either mixed or purely Dirichlet boundary conditions, [8, Remark 2.4] suggests that the positive quantity \(\frac{{\lambda _1(\mathcal {G})}T(\mathcal {G})}{|\mathcal {G}|}\) can be arbitrarily small, as a sequence \((\mathcal {G}_n)_{n\in \mathbb {N}}\) of metric graphs (with each \(\mathcal {G}_n{\setminus }{{\textsf{V}_{\textrm{D}}}}\) disconnected) displaying this behavior can be written down explicitly.
It turns out that the trouble with the product \({\lambda _1(\mathcal {G})}T(\mathcal {G})\) is simply a wrong scaling: as suggested by Proposition 4.1.(6), we rather have to study
While Remark 4.7.(2) shows that a lower bound on this quantity cannot simply be obtained as a straightforward corollary of the classical isoperimetric inequality for the ground-state energy of quantum graphs in [48, Théorème 3.1], in the case of domains the celebrated Kohler-Jobin inequality does state that “balls minimize the ground-state energy among sets with given torsional rigidity”. Conjectured in [54], it was proved in [35] and extended in [7, 13] to rougher domains and nonlinear operators.
The following Kohler-Jobin-type inequality for connected, compact, finite quantum graphs is the main result of this section. Unlike in the case of domains, there are two isoperimetric inequalities for the ground-state energy of \(\Delta _{\mathcal {G}}\) with \({{\textsf{V}_{\textrm{D}}}}=\emptyset \): one for the general (connected) case ([48, Théorème 3.1]) and one for the doubly connected case ([17, Lemma 4.3]). We have seen in Theorem 4.6 that the same is true of the torsional rigidity: in either case, the optimizers are intervals (connected case) and caterpillar graphs (doubly connected case). The same phenomenon appears in the following, too.
Theorem 5.8
We have
with equality if and only if \(\mathcal {G}\) is a path graph with mixed Dirichlet/Neumann boundary conditions.
If, additionally, \(\mathcal {G}\) is doubly connected after gluing all Dirichlet vertices, then
with equality if and only if \(\mathcal {G}\) is a caterpillar graph, see Fig. 6.
The proof is rather technical and will be subdivided in several Lemmata. We will follow Kohler-Jobin’s construction [35, Section 1.3.1] in the modified and generalized version proposed by Brasco in [13], thus eluding technical problem like the failure of analyticity of eigenfunctions on metric graphs.
Throughout this section, let \(\psi \) be a positive eigenfunction for the lowest eigenvalue of \(-\Delta _\mathcal {G}\) on the metric graph \(\mathcal {G}\) with Dirichlet conditions at \({{\textsf{V}_{\textrm{D}}}}\). Moreover, given a function \(u\in H_0^1(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) with \(u\ge 0\) on \(\mathcal {G}\), we define for \(t\in [0,\Vert u\Vert _\infty ]\) the level and superlevel sets
as well as
As in [13], we use the following notion of reference functions.
Definition 5.9
A function \(u\in H_0^1(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) with \(u\ge 0\) on \(\mathcal {G}\) is called a reference function if the set \(\{u=t\}\) is finite for a.e. \(t\in (0,\Vert u\Vert _\infty )\), and additionally
To begin with, we are going to prove that \(\psi \in H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) is indeed a reference function. Following [13, Lemma 3.2, Remark 3.3], let us observe the following.
Lemma 5.10
Let \(\psi \in H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) be a positive eigenfunction for the lowest eigenvalue \(\lambda _1(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) of \(-\Delta _\mathcal {G}\). Then
Proof
For all \(s\in [0,\Vert \psi \Vert _\infty ]\) the coarea formula yields immediately
Also, we see that
in particular, for a.e. \(t\in [0,\Vert \psi \Vert _\infty ]\) and small h we have
Dividing by h and passing to the limit \(h\rightarrow 0\) we find
as we wanted to prove. \(\square \)
Corollary 5.11
The first eigenfunction \(\psi \in H^1_0(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) for the lowest eigenvalue \(\lambda _1(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) of \(-\Delta _\mathcal {G}\) is a reference function.
Proof
To begin with, observe that
whence by Lemma 5.10
In particular, this shows that
If however \(t<\frac{1}{2}\Vert \psi \Vert _\infty \), then
and, again by Lemma 5.10,
This concludes the proof. \(\square \)
We follow Kohler-JobinFootnote 1 and introduce the following.
Definition 5.12
Let u be a reference function. Then the modified torsional rigidity with respect to u is
where
We will mostly take u to be \(\psi \), a positive eigenfunction associated with the lowest positive eigenvalue \(\lambda _1\); in this case, we will simply write
Observe that
holds for any reference function \(u\) as \(({\mathcal {C}}\circ u)\subset H^1_0(\mathcal {G})\). The crucial observation by Kohler-Jobin, which carries over to the Brasco’s generalized modified torsional rigidity, is that the supremum in \(T_{\textrm{mod}}(\mathcal {G},u)\) is actually attained, see Lemma 5.15. Before proving it, we observe that the quantity in (5.10) does not change upon taking the supremum on the even smaller class
i.e., \(\tilde{{\mathcal {C}}}\) is the convex cone of non-decreasing functions \(g\in W^{1,\infty }(0,\Vert u\Vert _\infty )\) with \(g(0)=0\).
Lemma 5.13
For any reference function \(u\), there holds
Proof
Clearly, it suffices to prove that
Indeed, for all \(g\in {\mathcal {C}}\) we can consider the function \({\tilde{g}}\) given by
because \(\tilde{g}'=|g'|\), \(\tilde{g}\in \tilde{{\mathcal {C}}}\). Now,
as \(g\le \tilde{g}\). \(\square \)
Remark 5.14
Suppose \(g\in {\mathcal {C}}{\setminus } \tilde{{\mathcal {C}}}\), i.e., there is a measurable subset \(A\subset (0,\Vert \psi \Vert _\infty )\) with positive measure, so that \(g'<0\) holds almost everywhere on \(A\). Thus, there exists some \(t_0\in (0,\Vert \psi \Vert _\infty )\) with \(\tilde{g}(t)>g(t)\) for all \(t>t_0\) where \(\tilde{g}\) is the function defined in (5.13). It follows that the inequality in (5.14) is strict if \(g\in {\mathcal {C}}{\setminus } \tilde{{\mathcal {C}}}\), and therefore a maximizer of (5.10) has to be an element of \(\tilde{{\mathcal {C}}}\). The following lemma proves the existence and uniqueness of such a maximizer and characterizes said maximizer.
Lemma 5.15
For any reference function \(u\), let \(g_0\) be the function defined by
Then \(g_0\in {{\mathcal {C}}}\) and
indeed, \(g_0\) is the unique maximizer of (5.10).
Proof
We follow [13, Proposition 3.5]. For all \(g\in \tilde{{\mathcal {C}}}\) we find
by Cavalieri’s principle (left addend) and the coarea formula (right addend). Now, one immediately checks that the following the pointwise estimate
holds for almost every \(t\in (0,\Vert u\Vert _\infty )\) with equality if and only if \(g'(t)=\frac{\alpha _u(t)}{\gamma _u(t)}\). We obtain
with equality if and only if \(g=g_0\), hence \(g_0\) necessarily defines the unique maximizer of (5.10) and
and it is immediate to check that \(\Vert g_0\Vert _{L^1}=T_{\textrm{mod}}(\mathcal {G},u)\). This concludes the proof. \(\square \)
We can now derive, as in [13, Proposition 3.8], a fundamental isoperimetric inequality.
Lemma 5.16
Let \(u\in H^1(\mathcal {G},{{\textsf{V}_{\textrm{D}}}})\) be any reference function. If \(J_0\) is a path graph with mixed Dirichlet/Neumann conditions with
then \(|J_0|\le |\mathcal {G}|\), with equality if and only if \(\mathcal {G}=J_0\).
If, additionally, \(\mathcal {G}\) is doubly connected after gluing all Dirichlet vertices, and if \(J_1\) is an interval with Dirichlet conditions at both endpoints with
then \(|J_1|\le |\mathcal {G}|\), with equality if and only if \(\mathcal {G}\) is a caterpillar graph.
Proof
By the Faber–Krahn-type inequality for torsional rigidity in Remark 4.7.(3) we know that
and likewise
in the doubly connected case, upon gluing all vertices in \({{\textsf{V}_{\textrm{D}}}}\).
If moreover \(|J_0|=|\mathcal {G}|\) in the general case (resp., \(|J_1|=|\mathcal {G}|\) in the doubly connected case), then \(T(J_0)=T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\) (resp., \(T(J_1)=T(\mathcal {G};{{\textsf{V}_{\textrm{D}}}})\)) and we know from Theorem 4.6 that this implies that \(J_0=\mathcal {G}\) (resp., \(\mathcal {G}\) is caterpillar graph). \(\square \)
Let us now complete the last step before attacking the proof of the Kohler-Jobin Inequality: to this aim, we will need to construct the symmetrization \(\psi ^*\) of the the eigenfunction \(\psi \). We see next how to perform this construction, which differs from the classical Schwarz symmetrization.
Lemma 5.17
There exists a monotonically decreasing function \({\psi ^*}\in H^1\left( 0,\root 3 \of {3T_{\textrm{mod}}(\mathcal {G})}\right) \) with \({\psi ^*}(\root 3 \of {3T_{\textrm{mod}}(\mathcal {G})})=0\), where \(T_{\textrm{mod}}(\mathcal {G})\) is defined as in (5.11), such that
The second inequality in (5.16) is actually an equality if and only if \(\mathcal {G}\) is a path graph of length \(\root 3 \of {3T_{\textrm{mod}}(\mathcal {G})}\).
Let, additionally, \(\mathcal {G}\) be doubly connected after gluing all Dirichlet vertices.
Then there exists a function \({\psi ^*}\in H^1_0\left( -\frac{1}{2}\root 3 \of {12T_{\textrm{mod}}(\mathcal {G})},\frac{1}{2}\root 3 \of {12T_{\textrm{mod}}(\mathcal {G})}\right) \) that is
-
monotonically decreasing on \([0,\frac{1}{2}\root 3 \of {12T_{\textrm{mod}}(\mathcal {G})}]\),
-
symmetric about 0, and
-
such that
$$\begin{aligned} \int _0^{\root 3 \of {12T_{\textrm{mod}}(\mathcal {G})}} |{{\psi ^*}}'(x)|^2\,\textrm{d}x{=}\int _{\mathcal {G}} |\psi '(x)|^2\,\textrm{d}x\hbox { and}\int _0^{\root 3 \of {12T_{\textrm{mod}}(\mathcal {G})}} |\psi ^*(x)|^2\,\textrm{d}x{\ge } \int _{\mathcal {G}} |\psi (x)|^2 \,\textrm{d}x.\nonumber \\ \end{aligned}$$(5.17)
The second inequality in (5.17) is an equality if and only if \(\mathcal {G}\) is a caterpillar graph of length \(\root 3 \of {12T_{\textrm{mod}}(\mathcal {G})}\).
Proof
We now follow [13, Proposition 4.1]. The main idea of the proof is to consider the modified torsional rigidity of the set \(\{\psi >t\}\), however with respect to the modified function \((\psi -t)_+\) restricted to the subgraph \(\mathcal {G}_t=\{\psi >t\}\) with Dirichlet conditions imposed in the boundary \(\partial \mathcal {G}_t\). The modified torsional rigidity \(T_{\textrm{mod}}(\mathcal {G}_t,(\psi -t)_+)\) can be computed using the fact that
for \(s\in [0,\Vert \psi \Vert _\infty -t]\). Corollary 5.11 and (5.18) yield that \((\psi -t)_+\) is a reference function on \(\mathcal {G}_t\). Using Lemma 5.15, we obtain
in particular \(T\in W^{1,\infty }(0,\Vert \psi \Vert _\infty )\) and
It follows that T is invertible as a function between \([0,\Vert \psi \Vert _\infty ]\) and its range \([0,{T_{\textrm{mod}}(\mathcal {G})}]\); we thus consider \(\phi :=T^{-1}\in W^{1,\infty }\) and find, by the coarea formula and a change of variables,
and
We conclude that
Kohler-Jobin’s original idea was to rearrange the values of \(\psi \) using the torsional rigidity of its superlevel sets \(\{\psi >t\}\). In our context, the first step is to introduce the function R that maps each \(\tau \in [0,{T_{\textrm{mod}}(\mathcal {G})}]\) to the unique \(R(\tau )\in {\mathbb {R}}\) such that
in the doubly connected case where we impose Dirichlet conditions at \(\pm R(t)\), or else
in the general case where we impose Dirichlet conditions at \(R(t)\) and Neumann conditions at \(0\); i.e., the range of \(R(\tau )\) is \([0,\frac{1}{2}\root 3 \of {12{T_{\textrm{mod}}(\mathcal {G})}}]\) in the doubly connected case and \([0,\root 3 \of {3{T_{\textrm{mod}}(\mathcal {G})}}]\) in the general case.
We are finally in the position to introduce the Kohler-Jobin symmetrization of \(\psi \): this is the function \(\psi ^*\) with domain whose domain is \([-\frac{1}{2}\root 3 \of {12{T_{\textrm{mod}}(\mathcal {G})}},\frac{1}{2}\root 3 \of {12{T_{\textrm{mod}}(\mathcal {G})}}]\) in the doubly connected case and \([0,\root 3 \of {3{T_{\textrm{mod}}(\mathcal {G})}}]\) in the general case and that is given by
where the function \(\kappa \) will be chosen as the solution of
in the doubly connected case, and
in the general case, respectively. Then, by choice of \(\psi ^*\) we have \(\alpha _{\psi ^*}(\kappa (\tau ))=2R(\tau )\) in the doubly connected case, and \(\alpha _{\psi ^*}(\kappa (\tau ))=R(\tau )\) in the general case, and we obtain
Now, to abbreviate the notation, we set \(J:=[-\frac{1}{2}\root 3 \of {12{T_{\textrm{mod}}(\mathcal {G})}},\frac{1}{2}\root 3 \of {12{T_{\textrm{mod}}(\mathcal {G})}}]\) in the doubly connected case, and \(J:=[0,\root 3 \of {3{T_{\textrm{mod}}(\mathcal {G})}}]\) in the general case. Then, using (5.20) and (5.21) it can be shown that
and
holds for all \(x\in J\) with \(|x|=R(\tau )\) in the doubly connected and general case, respectively. Then, using the coarea formula along with (5.24) and (5.19) we obtain
Now, note that for \(\tau \in [0,{T_{\textrm{mod}}(\mathcal {G})}]\) we have
Therefore, Lemma 5.16 yields \(\alpha _{\psi }(\phi (\tau ))\ge \alpha _{\psi ^*}(\kappa (\tau ))\). (In the doubly connected case, we use that \(\mathcal {G}_t\) is doubly connected after gluing all points in \(\partial \mathcal {G}_t\).) Using (5.24), we infer \(-\phi '(\tau )\le -\kappa '(\tau )\) which in turn yields—after integrating from \(\tau \) to \({T_{\textrm{mod}}(\mathcal {G})}\)—that \(\phi (\tau )\le \kappa (\tau )\). Thus, Cavalieri’s principle gives
To conclude the proof, we observe that equality in the previous inequality yields \(\alpha _\psi (\phi (t))=\alpha _{\psi ^*}(\kappa (\tau ))\) for all \(\tau \). By Lemma 5.16 this is only possible if \(\mathcal {G}_t\) is a caterpillar graph in the doubly connected case or a path graph in the general case. \(\square \)
We are now finally in the position to complete the proof of Theorem 5.8.
Proof of Theorem 5.8
We now adapt the proof of [13, Theorem 1.1], see [13, Section 5].
To begin with, we consider the interval
by Lemma 5.17 we can consider the decreasing function \({\psi ^*}\in H^1(J_0)\) with \({\psi ^*}(\root 3 \of {3T_{\textrm{mod}}(\mathcal {G})})=0\) that satisfies (5.16). Therefore,
where we used the min–max principle and Lemma 5.16 for the first inequality, Lemma 5.17 for the second inequality, and the min–max principle and (5.12) for the third inequality.
Likewise, in the doubly connected case we consider the interval
impose Dirichlet conditions on both endpoints, and consider the radially symmetric function \({\psi ^*}\in H^1_0\left( J_1\right) \) that satisfies (5.17). Accordingly, using the same arguments as in (5.25), we obtain
Equality in both chains of inequalities implies that
thus the statement about equality follows from the corresponding statement in Lemma 5.17. \(\square \)
6 Appendix: Torsion as landscape function
Let us formulate an abstract version of a comparison principle between eigenfunctions and torsion function. The following generalizes known bounds for Laplace or Schrödinger operators with Dirichlet boundary conditions on open domains of \(\mathbb {R}^d\) in [2, Theorem 1, Equation (0.5)], [29, Lemma 1.1], [5, Theorem 5, Equations (23) and (25)], [26], and [58, Theorem 2].
Proposition 6.1
Let A be a closed linear operator on \(C_b(X)\), where X is a locally compact metric space; or else on \(L^p(X)\), for some \(p\in [1,\infty ]\) and some \(\sigma \)-finite measure space X. Let \((\lambda ,\varphi )\) be an eigenpair of A.
Finally, let \(\rho \) be a positive function in C(X), resp. in \(L^p(X)\), such that \(\frac{\varphi }{\rho }\) is bounded, resp. essentially bounded. Then the following assertions hold.
-
(1)
If \(A\) has positive inverse (in the sense of Banach lattices), then
 (6.1)
(6.1) -
(2)
If \(-A\) generates a positive semigroup, then
 (6.2)
(6.2) -
(3)
If \(A\) has a positive inverse and \(-A\) generates a positive semigroup, then
 (6.3)
(6.3)



Proof
-
(1)
We find for all/a.e. \(x\in X\)
$$\begin{aligned} |\varphi (x)|=|\lambda A^{-1}\varphi (x)|\le |\lambda | A^{-1}\left( \left\| \frac{\varphi }{\rho }\right\| _\infty \rho \right) (x)=|\lambda |\left\| \frac{\varphi }{\rho }\right\| _\infty A^{-1}{\mathbf \rho }(x). \end{aligned}$$(6.4) -
(2)
In order to prove (6.2), observe that by the Spectral Mapping Theorem \((\textrm{e}^{-\lambda t},\varphi )\) is an eigenpair of \(\textrm{e}^{-tA}\) and, hence, due to positivity of \((\textrm{e}^{{{\,\textrm{Re}\,}}\lambda t}\textrm{e}^{-tA})_{t\ge 0}\),
 (6.5)
(6.5)Taking the infimum over \(t\ge 0\) concludes the proof of (6.2). Finally, (3) is obtained by combining the arguments in (1) and (2). \(\square \)

Recall that, if A is invertible, then \(A^{-1}\) is certainly positive whenever \(-A\) generates a positive contraction semigroup.
The following corollary is obtained by choosing \(\rho ={\textbf{1}}\) and \(\rho =A^{-1}{\textbf{1}}\) in Proposition 6.1. The assumptions on X in the following can clearly be weakened: we omit the details for the sake of simplicity.
Corollary 6.2
Let A be a closed linear operator on C(X), where X is a compact metric space; or else on \(L^p(X)\), for some \(p\in [1,\infty ]\) and some finite measure space X. Let A have positive inverse, and denote by v the abstract torsion function, i.e., the (positive) solution of \(Av={{\textbf{1}}}\).
Then the following assertions hold for any eigenpair \((\lambda ,\varphi )\).
-
(1)
If \(\varphi \) is bounded, then
 (6.6)
(6.6) -
(2)
If \(-A\) generates a positive semigroup and \(\frac{\varphi }{v}\) is bounded, then
 (6.7)
(6.7) -
(3)
If \(-A\) generates a positive semigroup and \(\varphi \) is bounded, then
 (6.8)
(6.8)



In particular, we deduce from (6.6) and (6.7) that
if additionally \(v\) is bounded, where \(|\lambda |_{\min }:=\min \{|\lambda |\ |\ \lambda \in \sigma _p(A)\}\): we have already encountered the first of these estimates in (5.7).
Observe that if A admits compactly supported eigenfunctions—this is, e.g., often the case for Laplacians on metric graphs—then the proof of Proposition 6.1 even yields the sharper estimates

Indeed, the assumptions of Proposition 6.1 are satisfied if we take \(X=\mathcal {G}\) and \(A=-\Delta _{\mathcal {G}}\): in fact, all eigenfunctions of \(-\Delta _{\mathcal {G}}\) are bounded, since they belong to \(H^1(\mathcal {G})\hookrightarrow L^\infty (\mathcal {G})\); furthermore, the quotient \(\frac{\varphi }{v}\) is bounded for any eigenfunction \(\varphi \), in view of the properties of the torsion function discussed in Sect. 3 and the well-known fact that eigenfunctions of \(-\Delta _{\mathcal {G}}\) behave like o(x) as \(x\rightarrow \textsf{v}\in \textsf{V}_{\textrm{D}}\), see Example 2.4.(1).
Bearing in mind that \(\textrm{e}^{t\Delta _\mathcal {G}}v\) is for all \(t\ge 0\) a continuous function, we hence obtain the following, a close analog of [32, Theorem 4.1 and Remark 4.1].
Proposition 6.3
Let \(-\Delta _\mathcal {G}\varphi =\lambda \varphi \), and let as usual v denote the torsion function on a metric graph \(\mathcal {G}\) that satisfies the Assumption 2.1. Then
Furthermore,
as well as
Observe that Corollary 6.2 can be also applied to Laplacians on combinatorial graphs (with Dirichlet conditions) or even more general Z-matrices; see also [27] for recent, more sophisticated localization results for such matrices.
Remark 6.4
-
(1)
The proofs of estimates (6.6) and (6.9) already available in the literature rely upon the additional assumption that A is self-adjoint and/or that it has compact resolvent. The estimate (6.8) was first obtained in [58, Theorem 2], whose proof is based on a Feynman–Kac-type formula that is assumed to hold with respect to the Brownian motion generated by the relevant Schrödinger operator.
-
(2)
Also, (6.6) yields
$$\begin{aligned} \frac{\Vert \varphi \Vert _1}{\Vert \varphi \Vert _\infty } \le |\lambda | T(X) \end{aligned}$$(6.14)for the abstract torsional rigidity \(T(X):=\Vert v\Vert _1\) and any eigenpair \((\lambda ,\varphi )\) of A. The efficiency \(E(X):=\frac{\Vert \varphi _1\Vert _1}{|X|\Vert \varphi _1\Vert _\infty }\) is commonly studied for the ground state \(\varphi _1\) of domains, see [14] and references therein.
-
(3)
Following a suggestion in [32, Section 4], Proposition 6.1.(1) can be generalized by observing that the inequality (6.4) is satisfied not only by the torsion function \(v=A^{-1}{{\textbf{1}}}\), but by any—possibly better behaved—“super-torsion function”, i.e., by any \(v\ge A^{-1}{{\textbf{1}}}\) (in fact, by any \(v\ge A^{-1}{{\textbf{1}}}_{{{\,\textrm{supp}\,}}\varphi }\)). However, it is not clear if this brings any advantages in our setting, given that a reasonably explicit formula for the torsion function is available on metric graphs.
-
(4)
Localization for operators that do not satisfy a maximum principle is a popular topic, see [39] and references therein. Let us explicitly observe that if A is merely invertible but its inverse is not positive, (6.1)–(6.6)–(6.2)–(6.7) can still be replaced by corresponding estimates involving the terms \(|A^{-1}|{\textbf{1}}(x)\), \( |A^{-1}|{\textbf{1}}(x)\), \(|\textrm{e}^{-tA}| \rho (x)\), \(|\textrm{e}^{-tA}| v(x)\), respectively, provided \(A^{-1}\) and \(\textrm{e}^{-tA}\) have a modulus in the sense of [57, Section IV.1], see also [47, Section C-II]: for instance, on C(X) or \(L^p(X)\) as in Proposition 6.1, this is especially the case if \(A^{-1}\), resp. \(\textrm{e}^{-tA}\), is a kernel operator, and in particular for general square matrices with complex coefficients. These generalizations are straightforward and in line with what was already observed in [26]. Furthermore, let us mention that Proposition 6.1.(2)–(3) and its corollaries can be extended in a natural way to operators that generate semigroups which are merely individually eventually positive: this is especially the case for distinguished realizations of higher order elliptic operators on bounded domains, see [22], and metric graphs, see [31].
Data Availability
All data generated or analysed during this study are included in this published article.
Change history
26 January 2023
Missing Open Access funding information has been added in the Funding Note.
Notes
Strictly speaking, Kohler-Jobin restricts in [35] to a class \({\mathcal {C}}\) that is actually smaller, as it consists of continuously differentiable functions only. In our context this raises a few technical issues, due to the fact that neither the torsion function nor the eigenfunctions of \(\mathcal {G}\) are continuously differentiable on the metric space \(\mathcal {G}\), as long as \(\mathcal {G}\) contains vertices of degree larger than 2. Brasco observed that defining \({\mathcal {C}}\) by means of Lipschitz continuity is sufficient to make sense of the integrals in \(T_{\textrm{mod}}\). This relaxation will be crucial for our study.
References
Arnold, D.N., David, G., Filoche, M., Jerison, D., Mayboroda, S.: Localization of eigenfunctions via an effective potential. Commun. Partial Differ. Equ. 44, 1186–1216 (2019)
Bañuelos, R., Carroll, T.: Brownian motion and the fundamental frequency of a drum. Duke Math. J. 75, 575–602 (2001)
Band, R., Lévy, G.: Quantum graphs which optimize the spectral gap. Ann. Henri Poincaré 18, 3269–3323 (2017)
Bandle, C.: Isoperimetric Inequalities and Applications. Monographs Studies Mathematics, vol. 7. Pitman, London (1980)
van den Berg, M.: Estimates for the torsion function and Sobolev constants. Potential Anal. 36, 607–616 (2012)
van den Berg, M., Davies, E.B.: Heat flow out of regions in \({\mathbb{R} }^m\). Math. Z. 202, 463–482 (1989)
van den Berg, M., Iversen, M.: On the minimization of Dirichlet eigenvalues of the Laplace operator. J. Geom. Anal. 23, 660–676 (2013)
van den Berg, M., Buttazzo, G., Velichkov, B.: Optimization problems involving the first Dirichlet eigenvalue and the torsional rigidity. In: Pratelli, A., Leugering, G. (eds.) New Trends in Shape Optimization. International Series of Numerical Mathematics, vol. 166, pp. 18–42. Springer, Cham (2015)
van den Berg, M., Ferone, V., Nitsch, C., Trombetti, C.: On Pólya’s inequality for torsional rigidity and first Dirichlet eigenvalue. Int. Equ. Oper. Theory 86, 579–600 (2016)
Berkolaiko, G., Kennedy, J.B., Kurasov, P., Mugnolo, D.: Surgery principles for the spectral analysis of quantum graphs. Trans. Am. Math. Soc. 372, 5153–5197 (2019)
Berkolaiko, G., Kuchment, P.: Introduction to Quantum Graphs. Mathematical Surveys and Monographs, vol. 186. American Mathematical Society, Providence (2013)
Braess, D.: Über ein Paradoxon aus der Verkehrsplanung. Unternehmensforschung 12, 258–268 (1968)
Brasco, L.: On torsional rigidity and principal frequencies: an invitation to the Kohler-Jobin rearrangement technique. ESAIM COCV 20, 315–338 (2014)
van den Berg, M., Della Pietra, F., Di Blasio, G., Gavitone, N.: Efficiency and localisation for the first Dirichlet eigenfunction. J. Spectr. Theory 11, 981–1003 (2021)
Brasco, L.: Convex duality for principal frequencies. Math. Eng. 4, 1–28 (2022)
Bueno, H., Ercole, G.: Solutions of the Cheeger problem via torsion functions. J. Math. Anal. Appl. 381, 263–279 (2011)
Berkolaiko, G., Kennedy, J.B., Kurasov, P., Mugnolo, D.: Edge connectivity and the spectral gap of combinatorial and quantum graphs. J. Phys. A 50, 365201 (2017)
Cadeddu, L., Gallot, S., Loi, A.: Maximizing mean exit-time of the Brownian motion on Riemannian manifolds. Monatsh. Math. 176, 551–570 (2015)
Cheeger, J.: A lower bound for the smallest eigenvalue of the Laplacian. In: Gunning, R.C. (ed.) Problems in Analysis, pp. 195–199. Princeton University Press, Princeton (1970)
Colin de Verdière, Y.: Semi-classical measures on quantum graphs and the Gauß map of the determinant manifold. Ann. Henri Poincaré 16, 347–364 (2015)
Colladay, D., Kaganovskiy, L., McDonald, P.: Torsional rigidity, isospectrality and quantum graphs. J. Phys. A 50, 035201 (2016)
Daners, D., Glück, J., Kennedy, J.B.: Eventually and asymptotically positive semigroups on Banach lattices. J. Differ. Equ. 261, 2607–2649 (2016)
Del Pezzo, L.M., Rossi, J.D.: The first eigenvalue of the \(p\)-Laplacian on quantum graphs. Anal. Math. Phys. 6, 365–391 (2016)
Düfel, M., Kennedy, J.B., Mugnolo, D., Plümer, M., Täufer, M.: Boundary conditions matter: on the spectrum of infinite quantum graphs (in preparation)
Exner, P., Kostenko, A., Malamud, M., Neidhardt, H.: Spectral theory of infinite quantum graphs. Ann. Henri Poincaré 19, 3457–3510 (2018)
Filoche, M., Mayboroda, S.: Universal mechanism for Anderson and weak localization. Proc. Natl. Acad. Sci. U.S.A. 109, 14761–14766 (2012)
Filoche, M., Mayboroda, S., Tao, T.: The effective potential of an \(M\)-matrix. J. Math. Phys. 62, 041902 (2021)
Friedlander, L.: Extremal properties of eigenvalues for a metric graph. Ann. Inst. Fourier 55, 199–212 (2005)
Giorgi, T., Smits, R.G.: Principal eigenvalue estimates via the supremum of torsion. Indiana Univ. Math. J. 59, 987–1011 (2010)
Glück, J., Mugnolo, D.: Eventual domination for linear evolution equations. Math. Z. 299, 1421–1433 (2021)
Gregorio, F., Mugnolo, D.: Bi-Laplacians on graphs and networks. J. Evol. Equ. 20, 191–232 (2020)
Harrell, E.M., Maltsev, A.V.: Localization and landscape functions on quantum graphs. Trans. Am. Math. Soc. 373, 1701–1729 (2020)
Kennedy, J.B., Kurasov, P., Malenová, G., Mugnolo, D.: On the spectral gap of a quantum graph. Ann. Henri Poincaré 17, 2439–2473 (2016)
Kennedy, J.B., Mugnolo, D.: The Cheeger constant of a quantum graph. PAMM Proc. Appl. Math. Mech. 16, 875–876 (2016)
Kohler-Jobin, M.-T.: Une méthode de comparaison isopérimétrique de fonctionnelles de domaines de la physique mathématique I. Première partie: une démonstration de la conjecture isopérimétrique \(p\lambda ^2\ge \pi j_0^4/2\) de Pólya et Szegő. Z. Angew. Math. Phys. 29, 757–766 (1978)
Kostenko, A., Mugnolo, D., Nicolussi, N.: Self-adjoint and Markovian extensions of infinite quantum graphs. J. Lond. Math. Soc. 105, 1262–1313 (2022)
Kostenko, A.S., Malamud, M.M., Neidhardt, H., Exner, P.: Infinite quantum graphs. Dokl. Math. 95, 31–36 (2017)
Kurasov, P.: Spectral Geometry of Graphs (in preparation)
Lefebvre, G., Gondel, A., Dubois, M., Atlan, M., Feppon, F., Labbé, A., Gillot, C., Garelli, A., Ernoult, M., Mayboroda, S., Filoche, M., Sebbah, P.: One single static measurement predicts wave localization in complex structures. Phys. Rev. Lett. 117, 074301 (2016)
Makai, E.: On the principal frequency of a convex membrane and related problems. Czech Math. J. 9, 66–70 (1959)
Makai, E.: On the principal frequency of a membrane and the torsional rigidity of a beam. In: Szegő, G., Loewner, C., Bergman, S., Schiffer, M.M., Neyman, J., Gilbarg, D., Solomon, H. (eds.) Studies in Mathematical Analysis and Related Topics: Essays in Honor of George Pólya, pp. 227–231. Stanford University Press, Stanford (1962)
Makai, E.: A proof of Saint-Venant’s theorem on torsional rigidity. Acta Math. Acad. Sci. Hung. 17, 419–422 (1966)
Mugnolo, D.: What is actually a metric graph? arXiv:1912.07549
Mugnolo, D.: Gaussian estimates for a heat equation on a network. Netw. Het. Media 2, 55–79 (2007)
Mugnolo, D.: Semigroup Methods for Evolution Equations on Networks. Understanding Complex Systems, Springer, Berlin (2014)
Mugnolo, D., Plümer, M.: Heat kernel and heat content of compact quantum graphs (in preparation)
Nagel, R. (ed.): One-Parameter Semigroups of Positive Operators. Lecture Notes in Mathematics, vol. 1184. Springer, Berlin (1986)
Nicaise, S.: Spectre des réseaux topologiques finis. Bull. Sci. Math. II Sér. 111, 401–413 (1987)
Ouhabaz, E.M.: Analysis of Heat Equations on Domains. London Mathematical Society Monographs, vol. 30. Princeton University Press, Princeton (2005)
Plümer, M.: Contributions to the Spectral Theory of Quantum Graphs. PhD thesis, FernUniversität in Hagen (2021)
Plümer, M.: Upper eigenvalues bounds for the Kirchhoff Laplacian on embedded metric graphs. J. Spectr. Theory 11, 1857–1894 (2021)
Pólya, G.: Torsional rigidity, principal frequency, electrostatic capacity and symmetrization. Q. Appl. Math. 6, 267–277 (1948)
Pólya, G.: Two more inequalities between physical and geometrical quantities. J. Indian Math. Soc. 24, 413–419 (1961)
Pólya, G., Szegő, G.: Isoperimetric Inequalities in Mathematical Physics. Annals of Mathematics Studies, vol. 27. Princeton University Press, Princeton (1951)
Post, O.: Spectral analysis of metric graphs and related spaces. In: Arzhantseva, G., Valette, A. (eds.) Limits of Graphs in Group Theory and Computer Science, pp. 109–140. EPFL - CRC, Boca Raton (2009)
Saint-Venant, B.: Mémoire sur la torsion des prismes. Mém. Savants étrangers 14, 233–560 (1855)
Schaefer, H.H.: Banach Lattices and Positive Operators. Grundlehren der Mathematischen Wissenschaften, vol. 215. Springer, Berlin (1974)
Steinerberger, S.: Localization of quantum states and landscape functions. Proc. Am. Math. Soc. 145, 2895–2907 (2017)
Yau, S.-T.: Isoperimetric constants and the first eigenvalue of a compact Riemannian manifold. Ann. Sci. École Norm. Sup. 8, 487–507 (1975)
Acknowledgements
We are grateful to Michiel van den Berg and Lorenzo Brasco for stimulating discussions, useful comments and for pointing us at interesting references.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by A. Mondino.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The authors were partially supported by the Deutsche Forschungsgemeinschaft (Grant 397230547).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mugnolo, D., Plümer, M. On torsional rigidity and ground-state energy of compact quantum graphs. Calc. Var. 62, 27 (2023). https://doi.org/10.1007/s00526-022-02363-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00526-022-02363-9