
Abstract
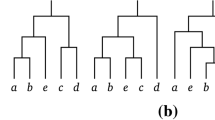
A box-tree is a bounding-volume hierarchy that uses axis-aligned boxes as bounding volumes. The query complexity of a box-tree with respect to a given type of query is the maximum number of nodes visited when answering such a query. We describe several new algorithms for constructing box-trees with small worst-case query complexity with respect to queries with axis-parallel boxes and with points. We also prove lower bounds on the worst-case query complexity for box-trees, which show that our results are optimal or close to optimal. Finally, we present algorithms to convert box-trees to R-trees, resulting in R-trees with (almost) optimal query complexity.
Article PDF
Similar content being viewed by others

Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Agarwal, de Berg, Gudmundsson et al. Box-Trees and R-Trees with Near-Optimal Query Time. Discrete Comput Geom 28, 291–312 (2002). https://doi.org/10.1007/s00454-002-2817-1
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00454-002-2817-1