
Abstract
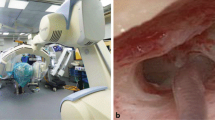
The aim of the study was to demonstrate a collision-free trajectory of an instrument through the facial recess to the site of planned cochleostomy guided by a surgery robot. The indication for cochlear implantation is still expanding toward more substantial residual hearing. A cochleostomy as atraumatic as possible will influence the preservation of inner ear function. The employment of a highly precise instrument guidance using a robot could represent a feasible solution for a constant reproducible surgical procedure. Screw markers for a point-based registration were fixed on a human temporal bone specimen prepared with a mastoidectomy and posterior tympanotomy. A DICOM dataset has been generated thereof in a 64-multislice computer tomography (CT). A virtual trajectory in a 3D model has been planned representing the path of instrumentation toward the desired spot of cochleostomy. A 1.9-mm endoscope has been mounted onto the robot system RobaCKa (Staeubli RX90CR) to visualize this trajectory. The target registration error added up to 0.25 mm, which met the desirable tolerance of <0.5 mm. A collision-free propagation of the endoscope into the tympanic cavity via the facial recess has been performed by the robot and the spot of cochleostomy could be visualized through the endoscope. Using a DICOM dataset of a high-resolution CT and a robot as a positioning platform for surgical instruments could be a feasible approach to perform a highly precise and constant reproducible cochleostomy. Furthermore, it could be a crucial step to preserve substantial residual hearing in terms of expanding the indications for cochlear implantation.






Similar content being viewed by others


References
Fraysse B, Macias AR, Sterkers O et al (2006) Residual hearing conservation and electroacoustic stimulation with the nucleus 24 contour advance cochlear implant. Otol Neurotol 27:624–633
Klenzner T, Richter B, Nagursky H, Schipper J, Laszig R, Aschendorff A (2004) Evaluation of the insertion-trauma of the Nucleus Contour Advance electrode-array in a human temporal bone model. Laryngorhinootologie 83:840–844 (in German)
Richter B, Aschendorff A, Nagursky H, Schipper J, Laszig R, Klenzner T (2005) Methods for evaluation of perimodiolar CI electrode arrays in human temporal bones. Laryngorhinootologie 84:42–50 (in German)
Aschendorff A, Kubalek R, Turowski B et al (2005) Quality control after cochlear implant surgery by means of rotational tomography. Otol Neurotol 26:34–37
Briggs RJ, Tykocinski M, Stidham K, Roberson JB (2005) Cochleostomy site: implications for electrode placement and hearing preservation. Acta Otolaryngol 125:870–876
Shepherd RK, Hatsushika S, Clark GM (1993) Electrical stimulation of the auditory nerve: the effect of electrode position on neural excitation. Hear Res 66:108–120
Nadol JB Jr, Eddington DK (2006) Histopathology of the inner ear relevant to cochlear implantation. Adv Otorhinolaryngol 64:31–49
Stover T, Kawamoto K, Kanzaki S, Raphael Y (2001) Feasibility of inner ear gene transfer after middle ear administration of an adenovirus vector. Laryngorhinootologie 80:431–435 (in German)
Paasche G, Gibson P, Averbeck T, Becker H, Lenarz T, Stover T (2003) Technical report: modification of a cochlear implant electrode for drug delivery to the inner ear. Otol Neurotol 24:222–227
Aschendorff A, Kromeier J, Klenzner T, Laszig R (2008) Quality control after insertion of the Nucleus Contour™ and Contour Advance™ electrode in adults. Ear Hear 28(2 Suppl):75S–79S
Plinkert PK, Plinkert B, Hiller A, Stallkamp J (2001) Applications for a robot in the lateral skull base. Evaluation of robot-assisted mastoidectomy in an anatomic specimen. HNO 49:514–522 (in German)
Schipper J, Aschendorff A, Arapakis I et al (2004) Navigation as a quality management tool in cochlear implant surgery. J Laryngol Otol 118:764–770
Engel D (2003) Sensor-based robot control for the application in surgery. Dissertation, University of Karlsruhe, Herdecke: GCA-Verlag (in German)
Korb W, Engel D, Boesecke R et al (2003) Development and first patient trial of a surgical robot for complex trajectory milling. Comput Aided Surg 8:247–256
Ngan CC, Klenzner T, Raczkowsky J, et al (2005) A robotic approach to atraumatic cochlear implantation. In: 39th annual conference of the German Society for Biomedical Engineering (Nuremberg, Germany, 14–17 September 2005), BMT, vol 50, supplementary vol 1, pp 21–22
Laszig R, Aschendorff A (1999) Cochlear implants and electrical brainstem stimulation in sensorineural hearing loss. Curr Opin Neurol 12:41–44
Fraysse B, Dillier N, Klenzner T et al (1998) Cochlear implants for adults obtaining marginal benefit from acoustic amplification: a European study. Am J Otol 19:591–597
NIH (1995) NIH consensus conference. Cochlear implants in adults and children. JAMA 274:1955–1961
von Ilberg C, Kiefer J, Tillein J et al (1999) Electric-acoustic stimulation of the auditory system. New technology for severe hearing loss. ORL J Otorhinolaryngol Relat Spec 61:334–340
Gantz BJ, Turner C, Gfeller KE, Lowder MW (2005) Preservation of hearing in cochlear implant surgery: advantages of combined electrical and acoustical speech processing. Laryngoscope 115:796–802
Parkinson AJ, Arcaroli J, Staller SJ, Arndt PL, Cosgriff A, Ebinger K (2002) The nucleus 24 contour cochlear implant system: adult clinical trial results. Ear Hear 23:41S–48S
Skarzynski H, Lorens A, D′Haese P et al (2002) Preservation of residual hearing in children and post-lingually deafened adults after cochlear implantation: an initial study. ORL J Otorhinolaryngol Relat Spec 64:247–253
Kiefer J, Gstoettner W, Baumgartner W et al (2004) Conservation of low-frequency hearing in cochlear implantation. Acta Otolaryngol 124:348–352
Boggess WJ, Baker JE, Balkany TJ (1989) Loss of residual hearing after cochlear implantation. Laryngoscope 99:1002–1005
Lehnhardt E (1993) Intracochlear placement of cochlear implant electrodes in soft surgery technique [in German]. HNO 41:356–359
Rodt T, Bartling S, Schmidt AM, Weber BP, Lenarz T, Becker H (2002) Virtual endoscopy of the middle ear: experimental and clinical results of a standardised approach using multi-slice helical computed tomography. Eur Radiol 12:1684–1692
Klenzner T, Ngan CC, Knapp F, Kromeier J, Körner K, Aschendorff A, Raczkowsky J, Wörn H, Schipper J (2006) New strategies for high precision cochleostomy using a hexapod robot system. Wien Med Wochenschr 156(Suppl 119):27 (abstract)
Bartling SH, Leinung M, Graute J, Rodt T, Dullin C, Becker H, Lenarz T, Stoever T, Majdani O (2007) A true minimally invasive approach for cochlear implantation: high accuracy in cranial base navigation through flat-panel-based volume computed tomography. Otol Neurotol 28:129–134
Majdani O, Bartling SH, Leinung M, Stoever T, Lenarz M, Dullin C, Lenarz T (2008) A true minimally invasive approach for cochlear implantation: high accuracy in cranial base navigation through flat-panel-based volume computed tomography. Otol Neurotol 29:120–123
Kahrs LA, Mehrwald M, Knapp FB, Werner M, Raczkowsky J, Hering P, Schipper J, Klenzner T, Woern H (2007) Image processing system for the detection of interfaces during a cochleostomy. Presented at the 3rd annual meeting of the German society of computer and robot assisted surgery, conference transcript, Karlsruhe, 11–13 October 2007. ProBusiness, Berlin, pp 69–71, ISBN 978-3-86805-008-0
Urban V, Wapler M, Weisener T, Schonmayr R (1999) A tactile feedback hexapod operating robot for endoscopic procedures. Neurol Res 21:28–30
Acknowledgments
This study has been supported by the Federal Ministry of Education and Research of Germany (No. 01 EZ 0405) and by the companies Cochlear GmbH and Richard Wolf GmbH, Germany.
Conflict of interest statement
The authors declare no conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Klenzner, T., Ngan, C.C., Knapp, F.B. et al. New strategies for high precision surgery of the temporal bone using a robotic approach for cochlear implantation. Eur Arch Otorhinolaryngol 266, 955–960 (2009). https://doi.org/10.1007/s00405-008-0825-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00405-008-0825-3