
Abstract
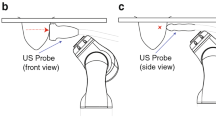
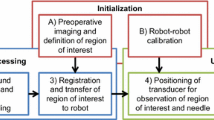
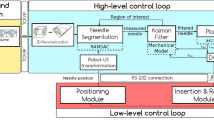
The purpose of this study was to develop a robotic system for ultrasound (US)-guided biopsy and to validate the feasibility, accuracy and efficacy using phantom tests. Twenty peas (mean diameter 9.3±0.1 mm) embedded within a gel-phantom were selected for biopsy. Once the best access was defined, the position of the US transducer was recorded by an optical tracking system. Positional data of the transducer and the corresponding US image were transferred to the roboter planning system (LINUX-based industrial PC equipped with video capture card). Once the appropriate position, angulation and pitch were calculated, the robotic arm moved automatically with seven degrees-of-freedom to the planned insertion path, aiming the needle-positioning unit at the center of the target. Then, the biopsy was performed manually using a coaxial technique. The length of all harvested specimens was measured, and the deviation of the actual needle tract from the center of the target was evaluated sonographically. In all targets, the biopsy specimen (mean length 5±1.2 mm) was harvested with only one needle pass required The mean deviation of the needle tip from the center of the target was 1.1±0.8 mm. Robotic assisted biopsies in-vitro using US-guidance were feasible and provided high accuracy.






Similar content being viewed by others
References
Fichtinger G, DeWeese TL, Patriciu A et al (2002) System for robotically assisted prostate biopsy and therapy with intraoperative CT guidance. Acad Radiol 9:60–74
Yanof J, Haaga J, Klahr P et al (2001) CT-integrated robot for interventional procedures: preliminary experiment and computer-human interfaces. Comput Aided Surg 6:352–359
Masamune K, Fichtinger G, Patriciu A et al (2001) System for robotically assisted percutaneous procedures with computed tomography guidance. Comput Aided Surg 6:370–383
Ng WS, Davies BL, Timoney AG, Hibberd RD (1993) The use of ultrasound in automated prostatectomy. Med Biol Eng Comput 31:349–354
Vilchis A, Masuda K, Troccaz J, Cinquin P (2003) Robot-based tele-echography: the TER system. Stud Health Technol Inform 95:212–217
Horn BKP (1987) Closed-form solutions of absolute orientation using unit quaternions. J Opt Soc A 4:629–642
Fitzpatrick JM, West JB, Maurer CR Jr (1998) Predicting error in rigid-body point-based registration. IEEE Trans Med Imaging 17:694–702
Detmer PR, Bashein G, Hodges T et al (1994) 3D ultrasonic image feature localization based on magnetic scanhead tracking: in vitro calibration and validation. Ultrasound Med Biol 20:923–936
Hummel J, Figl M, Kollmann C, Bergmann H, Birkfellner W (2002) Evaluation of a miniature electromagnetic position tracker. Med Phys 29:2205–2212
Silver B, Metzger TS, Matalon TA (1990) A simple phantom for learning needle placement for sonographically guided biopsy. Am J Roentgenol 154:847–848
Howe RD, Matsuoka Y (1999) Robotics for surgery. Annu Rev Biomed Eng 1:211–240
Cleary K, Nguyen C (2001) State of the art in surgical robotics: clinical applications and technology challenges. Comput Aided Surg 6:312–328
Benabid AL, Hoffmann D, Le Bas JF, Lavallee S (1995) Value of image guided neurosurgery in neuro-oncology. Bull Cancer 82:573s–580s
Birke A, Reichel H, Hein W et al (2000) ROBODOC—a path into the future of hip endoprosthetics or an investment error? Z Orthop Ihre Grenzgeb 138:395–401
Rothbaum DL, Roy J, Stoianovici D et al (2002) Robot-assisted stapedotomy: micropick fenestration of the stapes footplate. Otolaryngol Head Neck Surg 127:417–426
Bodner J, Wykypiel H, Wetscher G, Schmid T (2004) First experiences with the da Vinci operating robot in thoracic surgery. Eur J Cardiothorac Surg 25:844–851
Tseng CS, Chung CW, Chen HH, Wang SS, Tseng HM (1999) Development of a robotic navigation system for neurosurgery. Stud Health Technol Inform 62:358–359
Kaiser WA, Fischer H, Vagner J, Selig M (2000) Robotic system for biopsy and therapy of breast lesions in a high-field whole-body magnetic resonance tomography unit. Invest Radiol 35:513–519
Pfleiderer SO, Reichenbach JR, Wurdinger S et al (2003) Interventional MR-mammography: manipulator-assisted large core biopsy and interstitial laser therapy of tumors of the female breast. Z Med Phys 13:198–202
Bale RJ, Lottersberger C, Vogele M et al (2002) A novel vacuum device for extremity immobilisation during digital angiography: preliminary clinical experiences. Eur Radiol 12:2890–2894
Clifford MA, Banovac F, Levy E, Cleary K (2002) Assessment of hepatic motion secondary to respiration for computer assisted interventions. Comput Aided Surg 7:291–299
Nilsson A, Krause J (2003) Targeted tumour biopsy under contrast-enhanced ultrasound guidance. Eur Radiol 13(Suppl 4):L239–L240
Helbich TH, Matzek W, Fuchsjager MH (2004) Stereotactic and ultrasound-guided breast biopsy. Eur Radiol 14:383–393
Acknowledgments
The development of the robotic system was co-funded by the Austrian Federal Ministry of Transport, Innovation and Technology (BMVIT). The authors wish to acknowledge the significant contributions of Ludwig Kleiser, Kurt Renauer and Gerald Nittmann (ARC Seibersdorf Research) and Johann Hummel (Department of Biomedical Engineering and Physics, Medical University of Vienna). This study was supported in part by the Ludwig-Boltzmann Institute (director: C. Herold) for clinical and experimental radiology. We are grateful to Mary McAllister, Johns Hopkins University Hospital, Baltimore, MD, for manuscript assistance.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kettenbach, J., Kronreif, G., Figl, M. et al. Robot-assisted biopsy using ultrasound guidance: initial results from in vitro tests. Eur Radiol 15, 765–771 (2005). https://doi.org/10.1007/s00330-004-2487-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00330-004-2487-x