
Abstract
Antibiotic-resistant bacteria have posed a grave threat to public health by causing a number of nosocomial infections in hospitals. Mathematical models have been used to study transmission dynamics of antibiotic-resistant bacteria within a hospital and the measures to control antibiotic resistance in nosocomial pathogens. Studies presented in Lipstich et al. (Proc Natl Acad Sci 97(4):1938–1943, 2000) and Lipstich and Bergstrom (Infection control in the ICU environment. Kluwer, Boston, 2002) have provided valuable insights in understanding the transmission of antibiotic-resistant bacteria in a hospital. However, their results are limited to numerical simulations of a few different scenarios without analytical analyses of the models in broader parameter regions that are biologically feasible. Bifurcation analysis and identification of the global stability conditions can be very helpful for assessing interventions that are aimed at limiting nosocomial infections and stemming the spread of antibiotic-resistant bacteria. In this paper we study the global dynamics of the mathematical model of antibiotic resistance in hospitals considered in Lipstich et al. (2000) and Lipstich and Bergstrom (2002). The invasion reproduction number \({{\mathcal {R}}}_{ar}\) of antibiotic-resistant bacteria is derived, and the relationship between \({{\mathcal {R}}}_{ar}\) and two control reproduction numbers of sensitive bacteria and resistant bacteria (\({{\mathcal {R}}}_{sc}\) and \({{\mathcal {R}}}_{rc}\)) is established. More importantly, we prove that a backward bifurcation may occur at \({{\mathcal {R}}}_{ar}=1\) when the model includes superinfection, which is not mentioned in Lipstich and Bergstrom (2002). More specifically, there exists a new threshold \({{\mathcal {R}}}_{ar}^c\), such that if \({{\mathcal {R}}}_{ar}^c<{{\mathcal {R}}}_{ar}<1\), then the system can have two positive interior equilibria, which leads to an interesting bistable phenomenon. This may have critical implications for controlling the antibiotic-resistance in a hospital.








Similar content being viewed by others
References
Bergstrom CT, Lo M, Lipstich M (2004) Ecological theory suggests that antimicrobial cycling will not reduce antimicrobial resistance in hospitals. Proc Natl Acad Sci 101(4):13285–13290
Boldin B, Bonten MJM, Diekmann O (2007) Relative effects of barrier precautions and topical antibiotics on nosocomial bacterial transmission: results of multi-compartment models. Bull Math Biol 69(7):2227–2248
Chow K, Wang W, Crurtiss R, Castillo-Chavez C (2011) Evaluating the efficacy of antimicrobial cycling programmes and patient isolation on dual resistance in hospitals. J Biol Dyn 5(1):27–43
Lipstich M, Bergstrom CT (2002) Modeling of antibiotic resistance in the ICU-U.S. Slant, chapter 19. In: Weinstein RA, Bonten M (eds) Infection control in the ICU environment. Kluwer, Dordrecht
Lipstich M, Bergstrom CT, Levin BR (2000) The epidemiology of antibiotic resistance in hospital: paradoxes and prescriptions. Proc Natl Acad Sci 97(4):1938–1943
Liu M, Huo H, Li Y (2012) A competitive model in a chemostat with nutrient recycling and antibiotic treatment. Nonlinear Anal Real World Appl 13(6):2540–2555
Martinez JL, Olivares J (2012) Envrironmental pollution by antibiotic resistance genes. In: Keen PL, Montforts MH (eds) Antimicrobial resistance in the environment. Wiley-Blackwell, Hoboken, pp 151–171
Perko LM (1998) Differential equations and dynamical systems, text book in applied mathematics 7, 2nd edn
Webb G, D’Agata EMC, Magal P, Ruan S (2005) A model of antibiotic resistant bacterial epidemics in hopsitals. Proc Natl Acad Sci 102(37):13343–13348
Ye Y (1986) Theory of limit cycles, translations of mathematical monographs, vol 66. American Mathematical Society, Providence
Zhang Z, Ding T, Huang W, Dong Z (1992) Qualitative theory of differential translations of mathematical monographs, vol 101. American Mathematical Society, Providence
Author information
Authors and Affiliations
Corresponding author
Additional information
Supported by the NSF of China (No. 11171355, No. 11401111 and No. 11571379).
Appendix
Appendix
Proof of Proposition 2.1
Consider the directions of the orbits of system (1.2) on the boundary of \(\Omega \).
Firstly, along the R-axis, it follows from the first equation of (1.2) that \(S'(t)|_{S=0}=m\mu \ge 0\). Hence, either R-axis is an invariant line of system (1.2) (\(m=0\)), or the vector field of system (1.2) at each point on R-axis points to the interior of \(\Omega \) (\(m>0\)).
Secondly, consider the boundary \(S+R=1\). By system (1.2), we get that
Therefore, any orbit starting from a point on the boundary \(S+R=1\) enters the interior of \(\Omega \) as t increases.
Note that S-axis is an invariant line of system (1.2). By the discussions above, we conclude that \(\Omega \) is a positively invariant set. \(\square \)
Proof of Theorem 2.3
The Jacobian matrix at the resistance-free equilibrium \(E_{0}^*\) is:
Thus, \(E_0^*\) has a negative eigenvalue \(-\sqrt{(\beta -\tau _{1}-\tau _{2}-\gamma -\mu )^{2}+4\beta m\mu }\), and the other eigenvalue depends on \({\mathcal {R}}_{ar}\):
Obviously, if \({\mathcal {R}}_{ar}<1\), then \(E_0^*\) is a l.a.s. node, and if \({\mathcal {R}}_{ar}>1\), then \(E_0^*\) is an unstable saddle. When \({\mathcal {R}}_{ar}=1\), the eigenvalue dependent on \({\mathcal {R}}_{ar}\) equals to 0, and thus we need to apply center manifold theorem (Zhang et al. 1992) to judge the stability of \(E_0^*\). First, translate \(E_0^*\) to the origin, and do the affine transformation
Then, system (1.2) can be reduced to the norm form:
where
satisfy
It follows from the center manifold theorem that there exists a locally invariant manifold \(S=\mathcal H(R)\in \mathcal {C}^{2}\), such that all the solutions on this manifold have the property:
Here
Using
which comes from \({\mathcal {R}}_{ar}=1\), we get
where \(f({\mathcal {R}}_{rc})\) is defined in (2.8). Obviously, \(h_2\le 0({>}0)\) iff \(f({\mathcal {R}}_{rc})\le 0({>}0)\).
When \(h_2\ne 0\), i.e., \(f({\mathcal {R}}_{rc})\ne 0\), \(E_0^*\) is a saddle-node. However, we are only interested in the directions of the trajectories near \(E_0^*\) in the region \(\Omega \) (This is because that \(E_0^*\) is a boundary equilibrium). Therefore, we get that when \(f({\mathcal {R}}_{rc})>0\), \(E_0^*\) is unstable, when \(f({\mathcal {R}}_{rc})<0\), \(E_0^*\) is l.a.s., and when \(f({\mathcal {R}}_{rc})=0\), \(h_3\) is simplified as
and thus, \(E_0^*\) is a l.a.s. node.
Proof of Theorem 2.8
(a) When \({\mathcal {R}}_{ar}>1\), there are two cases.
If \(c\sigma (1-\sigma )=0\), then \(\mathrm {det}J(E^{*})=\beta (1-c)m\mu R^{*}/S^{*}>0\). With (2.22) and (2.23), we get that Jacobian matrix \(J(E^{*})\) has two negative eigenvalues, i.e., the unique interior equilibrium is a node and it is l.a.s..
If \(c\sigma (1-\sigma )>0\), then the unique zero of \(\Phi (S)\) in \((0,a^{*})\) is \(S^{*}=(-\phi _{1}-\sqrt{\Delta })/(2\phi _{2})\). Thus
The same conclusion can be obtained using (2.22) and (2.23).
(b) (i) In this case, \(\Phi (S)\) has two zeros \(S_{1}^{*}=(-\phi _{1}-\sqrt{\Delta })/(2\phi _{2})\) and \(S_{2}^{*}=(-\phi _{1}+\sqrt{\Delta })/(2\phi _{2})\). Denote the corresponding interior equilibria by \(E_1^*(S_1^*,R_1^*)\) and \(E_2^*(S_2^*,R_2^*)\), respectively. Thus,
and
We have \(E_{1}^{*}\) is a l.a.s. node, and \(E_{2}^{*}\) is an unstable saddle by (2.22) and (2.23).
(b) (ii) Here \(\Phi (S)\) has a zero \(S^{*}=-\phi _{1}/(2\phi _{2})\) in \((0,a^{*})\) with multiplicity 2. Further calculus shows that
Therefore, \(\mathrm {det}J(E^{*})\) has an eigenvalue equal to zero. We will determine the stability by using the center manifold theory to system (1.2). Translate \(E^{*}\) to the origin and take the affine transformation
Then system (1.2) is reduced to the norm form:
where F(S, R) and G(S, R) are homogenous quadratic polynomials and thus they satisfy
It follows from the center manifold theorem (Zhang et al. 1992) that there exists a locally invariant manifold \(S=h(R)\in \mathcal {C}^{2}\) such that all the solutions on this center manifold have the property
Since the coefficient of \(R^{2}\) in (4.1) is negative, we have \(E^{*}\) is a saddle-node and it is unstable.
(b) (iii) In this case \(\Delta =(\phi _1+2\phi _2a^*)^2>0\) and \(\Phi (S)\) has a unique zero \(S^{*}=(-\phi _{1}-\sqrt{\Delta })/(2\phi _{2})\) in \((0,a^{*})\). Hence
In the same way, the unique interior equilibrium is a l.a.s. node. \(\square \)
Global dynamics of system (1.2) for the case \(m=0\).
First, we give the existence theorem of equilibria.
Theorem 4.1
Let \({\mathcal {R}}_{sc}\) and \({\mathcal {R}}_{rc}\) be the control reproduction numbers defined in (2.2) and (2.3), respectively.
-
(a)
When \({\mathcal {R}}_{sc}\le 1\) and \({\mathcal {R}}_{rc}\le 1\), system (1.2) only has one boundary equilibrium O(0, 0), which is the unique disease-free equilibrium;
-
(b)
when \({\mathcal {R}}_{sc}>1\) and \({\mathcal {R}}_{rc}\le 1\), system (1.2) has a disease-free equilibrium O(0, 0) and a resistance-free equilibrium \(E_0(S_0,0)\);
-
(c)
when \({\mathcal {R}}_{sc}\le 1\) and \({\mathcal {R}}_{rc}>1\), system (1.2) has a disease-free equilibrium O(0, 0) and a resistant equilibrium \(U_0(0,R_0)\);
-
(d)
when \({\mathcal {R}}_{sc}>1\) and \({\mathcal {R}}_{rc}>1\), system (1.2) always has a disease-free equilibrium O(0, 0), a resistance-free equilibrium \(E_0(S_0,0)\), and a resistant equilibrium \(U_0(0,R_0)\), in addition,
-
(i)
if \(c\sigma (1-\sigma )>0\), \((1-c+c\sigma ){\mathcal {R}}_{rc}/(1-c+c\sigma {\mathcal {R}}_{rc})<{\mathcal {R}}_{sc}<{\mathcal {R}}_{rc}/(1-c\sigma +c\sigma {\mathcal {R}}_{rc})\), then system (1.2) has a unique interior equilibrium \(E_1(S_1,R_1)\),
-
(ii)
if \(c\sigma =0\) and \({\mathcal {R}}_{sc}={\mathcal {R}}_{rc}\), then system (1.2) has a singular line \(S_0-R-S=0\); and if \(\sigma =1\) and \({\mathcal {R}}_{sc}={\mathcal {R}}_{rc}/(1-c+c{\mathcal {R}}_{rc})\), then system (1.2) has a singular line \(S_0-(1-c)R-S=0\),
where
$$\begin{aligned} S_0= & {} 1-\dfrac{1}{{\mathcal {R}}_{sc}},\quad \,\,\, R_0=1-\dfrac{1}{{\mathcal {R}}_{rc}},\nonumber \\ S_1= & {} \dfrac{(1-c)(-S_0+(1-c\sigma )R_0)}{c^2\sigma (1-\sigma )},\nonumber \\ R_1= & {} \dfrac{(1-c+c\sigma )S_0-(1-c)R_0}{c^2\sigma (1-\sigma )}. \end{aligned}$$(4.2) -
(i)

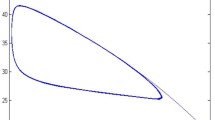
The phase portraits of system (1.2) when \(m=0\). a Case (a), b case (b), c case (c), d cases d(iv) and d(vi), e cases d(iii) and d(v), f case d(i), g case d(ii)
Next, we determine the stability of the equilibria described in Theorem 4.1.
Theorem 4.2
Consider the equilibria described in Theorem 4.1 , the following results hold.
-
(a)
When \({\mathcal {R}}_{sc}\le 1\) and \({\mathcal {R}}_{rc}\le 1\), the disease-free equilibrium O(0, 0) is locally asymptotically stable (l.a.s.);
-
(b)
when \({\mathcal {R}}_{sc}>1\) and \({\mathcal {R}}_{rc}\le 1\), the disease-free equilibrium O(0, 0) is unstable, and the resistance-free equilibrium \(E_0(S_0,0)\) is l.a.s.;
-
(c)
when \({\mathcal {R}}_{sc}\le 1\) and \({\mathcal {R}}_{rc}>1\), the disease-free equilibrium O(0, 0) is unstable, and the resistant equilibrium \(U_0(0,R_0)\) is l.a.s.;
-
(d)
when \({\mathcal {R}}_{sc}>1\) and \({\mathcal {R}}_{rc}>1\), the disease-free equilibrium O(0, 0) is unstable,
-
(i)
if \(c\sigma (1-\sigma )>0\) and \((1-c+c\sigma ){\mathcal {R}}_{rc}/(1-c+c\sigma {\mathcal {R}}_{rc})<{\mathcal {R}}_{sc}<{\mathcal {R}}_{rc}/(1-c\sigma +c\sigma {\mathcal {R}}_{rc})\), then both the resistance-free equilibrium \(E_0(S_0,0)\) and the resistant equilibrium \(U_0(0,R_0)\) are l.a.s., and the unique interior equilibrium \(E_1(S_1,R_1)\) is unstable,
-
(ii)
if \(c\sigma =0\) and \({\mathcal {R}}_{sc}={\mathcal {R}}_{rc}\), then all the solution orbits of system (1.2) converge to the singular line \(S_0-R-S=0\), and if \(\sigma =1\) and \({\mathcal {R}}_{sc}={\mathcal {R}}_{rc}/(1-c+c{\mathcal {R}}_{rc})\), then all the solution orbits of system (1.2) converge to the singular line \(S_0-(1-c)R-S=0\),
-
(iii)
if \({\mathcal {R}}_{sc}<(1-c+c\sigma ){\mathcal {R}}_{rc}/(1-c+c\sigma {\mathcal {R}}_{rc})\), then the resistance-free equilibrium \(E_0(S_0,0)\) is unstable, and the resistant equilibrium \(U_0(0,R_0)\) is l.a.s.,
-
(iv)
if \({\mathcal {R}}_{sc}>{\mathcal {R}}_{rc}/(1-c\sigma +c\sigma {\mathcal {R}}_{rc})\), then the resistance-free equilibrium \(E_0(S_0,0)\) is l.a.s., and the resistant equilibrium \(U_0(0,R_0)\) is unstable,
-
(v)
if \(c\sigma (1-\sigma )>0\) and \({\mathcal {R}}_{sc}=(1-c+c\sigma ){\mathcal {R}}_{rc}/(1-c+c\sigma {\mathcal {R}}_{rc})\), then the resistance-free equilibrium \(E_0(S_0,0)\) is unstable and the resistant equilibrium \(U_0(0,R_0)\) is l.a.s.,
-
(vi)
if \(c\sigma (1-\sigma )>0\) and \({\mathcal {R}}_{sc}={\mathcal {R}}_{rc}/(1-c\sigma +c\sigma {\mathcal {R}}_{rc})\), then the resistance-free equilibrium \(E(S_0,0)\) is l.a.s. and the resistant equilibrium \(U_0(0,R_0)\) is unstable,
where \(S_0,R_0,S_1\) and \(R_1\) are given by (4.2).
-
(i)
By Proposition 2.1, Theorems 4.1, 4.2 and Proposition 2.10, we obtain the global dynamics of system (1.2) for the case \(m=0\), see Fig. 9. The phase portraits correspond to the cases of Theorem 4.2.
Rights and permissions
About this article

Cite this article
Cen, X., Feng, Z., Zheng, Y. et al. Bifurcation analysis and global dynamics of a mathematical model of antibiotic resistance in hospitals. J. Math. Biol. 75, 1463–1485 (2017). https://doi.org/10.1007/s00285-017-1128-3
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00285-017-1128-3
Keywords
- Antibiotic resistance
- Invasion reproduction number
- Backward bifurcation
- Bistable phenomenon
- Global dynamics