
Abstract
Optimizing water management has become one of the biggest challenges for grapevine growers in California, especially during drought conditions. Monitoring grapevine water status and stress level across the whole vineyard is an essential step for precision irrigation management of vineyards to conserve water. We developed a unified machine learning model to map leaf water potential (\({\psi }_{\mathrm{leaf}}\)), by combining high-resolution multispectral remote sensing imagery and weather data. We conducted six unmanned aerial vehicle (UAV) flights with a five-band multispectral camera from 2018 to 2020 over three commercial vineyards, concurrently with ground measurements of sampled vines. Using vegetation indices from the orthomosaiced UAV imagery and weather data as predictors, the random forest (RF) full model captured 77% of \({\psi }_{\mathrm{leaf}}\) variance, with a root mean square error (RMSE) of 0.123 MPa, and a mean absolute error (MAE) of 0.100 MPa, based on the validation datasets. Air temperature, vapor pressure deficit, and red edge indices such as the normalized difference red edge index (NDRE) were found as the most important variables in estimating \({\psi }_{\mathrm{leaf}}\) across space and time. The reduced RF models excluding weather and red edge indices explained 52–48% of \({\psi }_{\mathrm{leaf}}\) variance, respectively. Maps of the estimated \({\psi }_{\mathrm{leaf}}\) from the RF full model captured well the patterns of both within- and cross-field spatial variability and the temporal change of vine water status, consistent with irrigation management and patterns observed from the ground sampling. Our results demonstrated the utility of UAV-based aerial multispectral imaging for supplementing and scaling up the traditional point-based ground sampling of \({\psi }_{\mathrm{leaf}}\). The pre-trained machine learning model, driven by UAV imagery and weather data, provides a cost-effective and scalable tool to facilitate data-driven precision irrigation management at individual vine levels in vineyards.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Wine grapes are one of the top five most valuable specialty crops in California, generating an annual retail value over $43.6 billion (CDFA 2020; Wine Institute 2020). With a total acreage of over 250,000 ha (620,000 acres), the industry produces above 3.5 million tons of wine grapes per year and over 80% of wine in the US. The central valley, coastal regions and southern California are the major wine grape producing regions in California. Dominated by Mediterranean climate with a warm and dry growing season, most of vineyards in California are drip irrigated. Optimizing water management has become increasingly important for wine producers, due to the increasing water demand associated with the expansion of specialty crops in Central Valley (Mall and Herman 2019). Decrease in water availability is further exacerbated by warming and drying climate. The severe drought in recent years has led to excessive ground water pumping by growers, leading to rapid rates of groundwater depletion (Famiglietti 2014). As a result, more restricted groundwater usage is now being regulated in California via the Sustainable Groundwater Management Act (SGMA) (Leahy 2015). This requires growers to increase water use efficiency. Deficit irrigation treatments have been widely applied in vineyard management in the late growing season, to conserve water, improve the quality of wines, and facilitate harvest (Kustas et al. 2018).
Timely mapping of water status for whole blocks is critical for adaptive and precision irrigation management at zonal or individual vine levels to increase water use efficiency, especially with regard to initiating irrigation (Intrigliolo and Castel 2007). Typically, vine physiological water status is most commonly assessed with stem and/or leaf water potentials (\({\psi }_{\mathrm{stem}}\) and \({\psi }_{\mathrm{leaf}}\)) using pressure chambers (Choné et al. 2001; Williams and Araujo 2002). However, these field measurements are labor-intensive and are usually conducted on a very limited number of vines, limiting their utility for mapping within-field variability and tracking temporal dynamics of vineyard blocks.
Remote sensing techniques, including unmanned aerial vehicles (UAVs) and satellite based imaging, on the other hand, provide valuable opportunities for mapping water stress level of grapevines in a cost effective way. A few small-scale UAV studies with multispectral imagery have found that various vegetation indices (VI) are significantly correlated with grapevine water stress level (Baluja et al. 2012; Espinoza et al. 2017). These included normalized difference vegetation index (NDVI) and green normalized difference vegetation index (GNDVI) in a Cabernet Sauvignon orchard in Washington State (r = 0.56 and 0.65 respectively) (Espinoza et al. 2017), and the ratio of transformed chlorophyll absorption in the reflectance index (TCARI) over optimized soil-adjusted vegetation index (OSAVI) (R2 = 0.84) over a commercial rain-fed Tempranillo vineyard in Spain (Baluja et al. 2012). The performance of several narrowband reflectance indices from spectroradiometers has also been evaluated for grapevine water status detection over a commercial Pinot noir vineyard in California (Rodríguez-Pérez et al. 2007), and red/green index (RGI) and structure intensive pigment index (SIPI) performed best for canopy-level water status estimation (R2 = 0.62 and 0.54). High resolution UAV thermal imagery has also been used to derive crop water stress index (CWSI) for mapping grapevine \({\psi }_{\mathrm{leaf}}\) over a Pinot noir vineyard in Spain with a R2 of 0.83 (Bellvert et al. 2014).
At a coarser spatial resolution, several studies have attempted to use multispectral and/or thermal satellite imagery for detecting grapevine water stress. Bellvert et al. (2020), for example, evaluated the feasibility of using Sentinel-2 optical and Sentinel-3 thermal imagery in the two-source energy balance model for determining spatially distributed vine water status via a CWSI–\({\psi }_{\mathrm{leaf}}\) relationship. They found that CWSI at the satellite resolution, even after sharpening the thermal imagery, was not as reliable as those from finer resolution airborne thermal imagery. At the individual vineyard level, linear models were developed to estimate grapevine \({\psi }_{\mathrm{stem}}\) with time-series of vegetation indices (VIs) from 3 m PlanetScope satellite imageries (Helman et al. 2018), based on data from 82 vineyards in Israel. Kandylakis and Karantzalos (2016) found red-edge bands from WorldView-2 satellite imageries provided additional information in estimating vine biophysical and biochemical properties.
Recently more sophisticated approaches such as artificial neural network (ANN) machine learning model have been developed to predict the temporal dynamics of vine water stress level over a vineyard in China (Romero et al. 2018) and in Chile (Poblete et al. 2017), by combining multiple VIs and spectral reflectance. The machine learning model had better performance for estimating \({\psi }_{\mathrm{leaf}}\) with a R2 of 0.83 over three dates (Romero et al. 2018). In contrast, models based on single VI could only capture less than 23% of variance in measured \({\psi }_{\mathrm{leaf}}\). This is mostly because various VIs and reflectance in individual bands carry complementary information about the structure, vigor, and physiology (Xue and Su 2017).
Most of these studies were conducted within one single vineyard. It is not clear how robust those water stress mapping approaches are when being applied across vineyards with different cultivars, management practices, environmental and climate conditions (Helman et al. 2018). Physiological studies have shown that weather conditions, including air temperature, relative humidity, and vapor pressure deficit (VPD), regulate plant stomatal closure and water exchange with atmosphere, and thus directly affect plant water status significantly (Garnier and Berger 1985; Ortuño et al. 2006). However, previous studies haven’t incorporated weather data for plant water stress monitoring along with remotely sensed imagery.
This study aims to develop a generalized remote sensing approach to monitor the spatial variability and temporal dynamics of \({\psi }_{\mathrm{leaf}}\) in California’s vineyards, using high resolution multispectral UAV imagery and weather data. We leveraged the extensive field campaigns from the Grape Remote Sensing Atmospheric Profile and Evapotranspiration eXperiment (GRAPEX), a multi-year collaboration between E. & J. Gallo Winery, U.S. Department of Agricultural Research Service (USDA-ARS), and several universities (Kustas et al. 2018). Our specific objectives include (1) evaluating the capability and robustness of UAV-based multispectral \({\psi }_{\mathrm{leaf}}\) models for monitoring grapevine water status across vineyards; (2) developing machine learning models to combine UAV imagery and weather data for improved monitoring; and (3) examining the added values of weather and red edge spectral band for mapping wine grape water status through time.
Materials and methods
Site description
This study focused on three commercial mature drip-irrigated vineyards. Two of them were planted to Vitis vinifera cv. Petite Sirah (BAR007) and Vitis vinifera cv. Cabernet Sauvignon (BAR012) in 2013 and 2010 respectively, and located near Cloverdale, in Sonoma County. The third one is located more inland, near Fresno in the southern part of the Central Valley (RIP 720); the 16-ha vineyard was planted in 2013 to Vitis vinifera cv. Merlot (Fig. 1). The study region has a typical Mediterranean climate, characterized by mild winters and hot dry summers. The bud break typically occurs in mid-March to early April, followed by flowering and fruit set late spring to early summer. Veraison starts in mid to late July, after which deficit irrigation is usually applied to cut water use and improve grape quality. Grapes in these blocks are typically harvested in late September to early October.

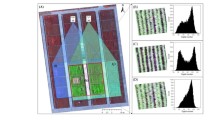
Study area (inset) and experiment design of three mature commercial vineyards in California: a two vineyards (BAR007 and BAR012) near Cloverdale CA and b four blocks (T1, T2, T3, T4) in the RIP720 vineyard near Fresno CA. Block boundaries were shown as black polygons on top of the false color UAV imageries acquired over (a) BAR007 and BAR012 on July 29, 2019, and over (b) RIP720 on July 26, 2020. Locations of sampled vines with ground measurements are shown as blue dots. Also shown are NDVI imageries of RIP720 before and after applying the non-vegetation mask in (c), (d), respectively
The BAR012 and BAR007 vineyards have hilly topography and gravelly loam soil. In both fields, vines are trellised and trained in a split canopy with 1.8 m vine spacing and 3.35 m row spacing. The vine rows are oriented differently in these two fields, along northwest to southeast in BAR007 vs. northeast-southwest direction in BAR012. The RIP720 vineyard is flat, dominated by sandy loam soil, and has much warmer climate than the BAR blocks (Kustas et al. 2018). The Merlot vines were planted with east–west row orientation and 3.35 m row spacing and 1.52 m vine spacing. This vineyard was split into 4 blocks, allowing for different irrigation treatments to each block (T1, T2, T3, T4) (Fig. 1). In 2018, T1 and T2 blocks were under deficit irrigation (with applied water equivalent to only 75% of evapotranspiration), while T3 and T4 blocks had no water stress treatments. In 2020, T1 was well watered, while the irrigation in T2, T3 and T4 was reduced in late July to induce different water stress levels, and those three blocks were then intensively irrigated from late July to early August to achieve full recovery from water stress.
Seven Intensive Observation Periods (IOPs) were conducted in 2018–2020, typically between early June and early August, and scheduled around 1 to 2 Landsat overpasses. Vine canopies were fully developed, and the phenological stages ranged from pea sized grape to various degrees of ripening depending on the IOP. During all the IOPs, the cover crop had been mowed or was already senesced (stubble). Various ground measurements and aerial imagery were collected during the IOP around Landsat and Sentinel satellite overpassing dates.
UAV flights and image processing
We acquired multispectral aerial imagery using the MicaSense RedEdge camera integrated to a DJI Matrice 100 quadcopter during 2018–2020 growing seasons. The MicaSense RedEdge camera have five spectral bands to record reflected radiation at blue (centered at 475 nm), green (560 nm), red (668 nm), red-edge (717 nm), and near infrared (840 nm) (MicaSense Inc. Washington, USAFootnote 1). A sun irradiance sensor was installed on the top of the quadcopter to measure the incoming solar irradiance for each spectral band.
A total of eight flights were conducted over the study vineyards (Table 1). The same flight plan was designed and executed with 80% front overlap and 80% side overlap. The UAV system was flown at 120 m above ground level, resulting in aerial images at 8 cm resolution. All flights were conducted around solar noon to reduce the impacts of shadows. The photos of the calibrated reflectance panel were taken immediately before and after each flight for radiometric calibration. In each vineyard, we placed five ground control points (GCPs) for georeference, four at the corners and one at the center. The GPS coordinates were recorded using Trimble Geo 7x (Trimble, CA, USA).
The raw multispectral images were stitched and processed with the Pix4DMapper Pro photogrammetry software (Pix4D LLC, Swiss). The software generated the automatic tie points initially. The coordinates of the GCPs were then imported to ensure the geolocation accuracy, resulting a georeference error lower than 30 cm. At the second step, the point cloud and 3D textured mesh were constructed based on the automatic tie points, and the digital surface model was further created. Radiometric calibration was performed using the measurements of the calibration panel, to generate orthomosaics of reflectance maps at 8 cm for each spectral band. Image co-registration was further performed to ensure the spatial alignment among imagery acquired from multiple dates.
We calculated multiple widely-used VIs with the reflectance from different bands from the orthomosaics as described above (see Table 2). NDVI is the most widely used vegetation index for monitoring plant growth, vigor, and structure (Rouse et al. 1974). Several studies have also found NDVI is significantly related to overall plant stress level, as a result of cumulative water deficit on plant growth (Acevedo-Opazo et al. 2008; Baluja et al. 2012; Poblete et al. 2017). However, there is latency in the response of NDVI and other spectral indices to the onset of vegetation stress, which thermal-infrared based approaches can readily detect as long as an image is available (Knipper et al. 2019). Various indexes were developed to reduce the noise from background soil, such as soil adjusted vegetation index (SAVI) and optimized soil adjusted vegetation index (OSAVI) (Huete 1988; Rondeaux et al. 1996), and to reduce the atmospheric effect, e.g., atmospherically resistant vegetation index (ARVI) (Kaufman and Tanre 1992). Enhanced vegetation index (EVI) was developed to improve sensitivity in high biomass conditions while minimizing soil and atmosphere influences (Huete et al. 2002). Another group of VIs take advantage of the green band, i.e., GNDVI, simple ratio green (SRgreen), green red vegetation index (GRVI), to enhance chlorophyll pigment concentration signal (Gitelson and Merzlyak 1998; Chen 1996; Motohka et al. 2010). By using reflectance from the red edge band, NDRE, plant senescence reflectance index (PSRI) and red edge green index (REGI) were also found to be good indicators of canopy chlorophyll content (Barnese et al. 2000; Tilling et al. 2007; Merzlyak et al. 1999).
To separate vine canopy and soil pixels, we applied the Otsu thresholding method (Otsu 1979) to the NDVI imagery from each flight. The NDVI histogram over all pixels showed a bimodal distribution, one representing plant canopy and the other representing soil background. The Otsu thresholding method determined the optimal thresholding value to maximize the between-class variance and minimize the within-class variance (Meyer and Neto 2008). The soil background pixels were then masked out, and only the remaining vegetated pixels were used for further analysis (Fig. 1). Considering the typical vine canopy size is about 200 cm in our study vineyards, we further applied a 60 cm buffer from the center of the canopy to further exclude potentially remaining mixed pixels at the canopy edge; the average reflectance and VIs within the buffer were then extracted to match the canopy of the sampled grapevines in the field as shown in the following section.
Field measurements
Biophysical measurements were collected over 4 vines for each of the four blocks in the RIP720 vineyard, and over 10 vines in both BAR007 and BAR012 (Fig. 1). Within each block, vines were selected at the upwind locations from each flux tower in the predominant wind direction, and we sampled as many vines as possible within an hour to ensure that measurements within a day were collected under similar weather and sunlight conditions. We collected the high precision GPS coordinates of all sampled vines with Trimble Geo 7x. Leaf water potentials \({(\psi }_{\mathrm{leaf}}\)) were measured concurrently with the UAV flights, using pressure chambers (PMS Inc., Oregon, USAFootnote 2) during a 1-h time window centered at local solar noon. For each sampled vine, three mature and sun exposed leaves were selected for measurements. The number of measured sample vines concurrent with UAV flights, for each IOP is listed in Table 1, along with weather conditions.
We downloaded the hourly weather data including air temperature and relative humidity from CIMIS station website (https://cimis.water.ca.gov/). The closest stations, the Fresno State (#80) and Sanel Valley (#106) CIMIS stations, were selected for the RIP720 and BAR007/012 vineyards, respectively. These stations were 12 and 20 km away from the nearby vineyards. A comparison with data from the weather stations in the field showed a pretty good agreement. We calculated hourly VPD and averaged air temperature and VPD around solar noon (12:00–14:00) to represent the corresponding weather condition for each flight.
Statistical approaches for leaf water potential estimation
We first examined the univariable relationships between the field measured \({\psi }_{\mathrm{leaf}}\) and the VIs, using Pearson correlation coefficients (r). This provided a baseline evaluation about the capability of \({\psi }_{\mathrm{leaf}}\) mapping with a simple remotely sensed VI. Correlation was done first for each vineyard and each flight date, respectively; data from all days for each vineyard (n = 40 for RIP720 and n = 6 for BAR007, n = 11 for BAR012) were then pooled together to quantify the correlation across dates and sampled vines within each vineyard. Finally, all data points (n = 57) were used for general correlation across all days and vineyards.
To develop a robust model for \({\psi }_{\mathrm{leaf}}\) estimation, we explored various statistical approaches to combine remote sensing metrics and weather data. In addition to stepwise linear regression (LR), we explored three machine learning algorithms to capture potential non-linear complex relationships, i.e., support vector regression (SVR) (Pasolli et al. 2011), random forest (RF) (Zhou et al. 2016), and extreme gradient boosting (XGB) (Ghatkar et al. 2019). The predictors include the reflectance of 5 individual spectral bands, 11 vegetation indices, and 2 weather variables (air temperature and VPD). The SVR algorithm has been used in remote sensing applications for biophysical parameter estimation (Tuia et al. 2011), soil moisture estimation (Pasolli et al. 2011), land surface temperature estimation (Moser and Serpico 2009), etc. This algorithm aims to find the best fit hyperplane that has the maximum number of points without exceeding the margin. The major advantages of SVR include that it is less prone to overfitting problems and it has good generalization capability when training samples are very limited (Calderón et al. 2015). The RF algorithm has been the most widely used machine learning approach in remote sensing applications, such as biomass estimation (Zhou et al. 2016) and surface temperature retrieval (Yang et al. 2017). The RF algorithm is based on multiple decision trees and bootstrapping. Individual regression trees are fitted to each bootstrap sample. By combining the prediction of individual decision tree, the final RF model can yield optimal results (Sagi and Rokach 2018). The RF algorithm is proved to be robust when some predictors are highly correlated (Clark 2017). Similar with RF, the XGB algorithm is also an ensemble learner. It is an optimized implementation of the gradient boost algorithm, featuring speed, scalability, and high efficiency. Different from RF, the decision trees in XGB were not independent from each other. The new tree was built based on previous tree by minimizing the prediction residuals. The XGB algorithm was found to outperform RF and SVR in some remote sensing applications, with higher prediction accuracy and less overfitting problems (Ghatkar et al. 2019; Pham et al. 2020).
We built the above machine learning models using the “Caret” package in R (Kuhn 2008). To improve the model performance and reduce the number of potentially correlated predictors, the recursive feature elimination method was applied for feature selection. This method iteratively follows these steps: fit the data with all features given the specific model, rank the importance of all features, remove the feature that is least important, and refit the model. These steps are performed iteratively until the model with the least RMSE is found (Kuhn, 2008). The recursive feature elimination was done independently for each machine learning algorithms, and only the selected variables were used for model building. A repeated k-fold cross-validation method (k = 5, repeat = 10) was applied for both model building and testing. For each of the five folds, 80% of the observations (n = 45) were randomly selected as the training set, and the rest 20% (n = 12) were used as the independent testing set. We evaluated the model performance using three statistical measures: the coefficient of determination (R2), the root mean squared error (RMSE), and the mean absolute error (MAE) for each fold. The process was repeated 10 times and the mean and standard deviations of the statistical measures were summarized from five folds results.
To further evaluate the value of incorporating weather variables in the models, we also built and tested the reduced models with a subset of input variables, i.e., excluding the weather variables (NoWeather). Considering that many low cost sensors do not have the red edge band, another set of reduced models were tested by further excluding the red edge reflectance and all red-edge VIs from the list of the predictors (e.g., NoRedEdgeNoWeather).
Variable importance and response functions
We quantified the importance of each predictor in estimating leaf water potential, using a metric called mean increase in node purity (the randomForest package in R), which is the average residual sum of squares decreases from splitting on the variables over all trees (Strobl et al. 2008) and thus represents each variable’s contribution to the improvement of the final prediction. To further understand the effects of each key predictor on \({\psi }_{\mathrm{leaf}}\), we derived the individual conditional expectation (ICE) plots (Goldstein et al. 2015). Unlike the partial dependence plots (PDP), the ICE plots not only quantify the marginal effect of a feature on the predicted outcome of a fitted model over all samples (Lemmens and Croux 2006), but also depict the dependence of the prediction on a feature for each sample separately (Goldstein et al. 2015). The ICE plots can thus show how the specific variable affects the final prediction and at which values the influence of the variable is stronger (Arribas-Bel et al. 2017). The heterogeneous relationships, that are typically obscured in the PDP plots, are thus revealed.
Field mapping and analysis of predicted \({{\varvec{\psi}}}_{\mathbf{l}\mathbf{e}\mathbf{a}\mathbf{f}}\)
The model with the best performance was then used to map the \({\psi }_{\mathrm{leaf}}\) over the entire orchard for each flight, using the corresponding weather and VIs as predicting variables. To examine whether the spatial and temporal pattern of the predicted \({\psi }_{\mathrm{leaf}}\) matched the treatments in the RIP720 vineyard, we extracted the values of the predicted \({\psi }_{\mathrm{leaf}}\) map for each block, and generated the boxplots of the predicted \({\psi }_{\mathrm{leaf}}\) for each block across different dates. In addition, to compare with the measured \({\psi }_{\mathrm{leaf}}\), the distribution of the predicted \({\psi }_{\mathrm{leaf}}\) for each date was plotted as histogram.
Results
Relationship between leaf water potential and VIs and weather variables
Within each vineyard, \({\psi }_{\mathrm{leaf}}\) was found significantly correlated with the majority of vegetation indices over all sampled vines across multiple days (Table 3). All VIs had a correlation coefficient higher than 0.8 (p < 0.01), based on the data acquired during the two available flights in 2019 over the two BAR vineyards (n = 17). VIs based on the reflectance contrasts in the NIR and red bands, such as NDVI, ARVI, EVI, SAVI and OSAVI, had higher correlation with \({\psi }_{\mathrm{leaf}}\) (r > 0.88) than other indices. VIs based on green band, i.e., GNDVI, GRVI and SRgreen, were also highly correlated with \({\psi }_{\mathrm{leaf}}\), with r higher than 0.83. Among chlorophyll indices, NDRE was strongly correlated (r = 0.84) while REGI was the least correlated (r = 0.68). In the RIP720 vineyard, the correlation between VIs and \({\psi }_{\mathrm{leaf}}\) when combining all four flights in 2018 and 2020, were lower than those from the two BAR blocks, although significant. Among them, NDRE had the highest correlation with r = 0.56 (p < 0.001). However, when combining all data from three vineyards (BAR007, BAR012 and RIP720), the correlations between most VIs and \({\psi }_{\mathrm{leaf}}\) were much lower and statistically less significant. NDRE and GRVI were the only VIs that were significantly correlated with \({\psi }_{leaf}\), with a correlation coefficient of −0.27 (p < 0.01) and 0.25 (p < 0.01) (n = 57), respectively (Fig. 2).

Relationship between Normalized Difference RedEdge Index (NDRE) and measured leaf water potential (\({\psi }_{\mathrm{leaf}}\)) of the sampled vines over RIP720 (solid circles) and BAR007 (open squares) and BAR012 (open triangles). The linear regression lines are also shown for RIP720, BAR007 and BAR012 vineyard blocks, respectively
When evaluating the correlation between spatial variability of VIs with the measured \({\psi }_{\mathrm{leaf}}\) within each vineyard, the performance of any single VI varied among different days, especially over RIP720. Over BAR007 and BAR012, slightly higher correlations were found in late June than late July; chlorophyll indices performed better on 27 June 2019, as PSRI and REGI had correlation with \({\psi }_{\mathrm{leaf}}\) higher than 0.9. The structural indices had better performance on the second date (29 July 2019), e.g., structural indices had a correlation higher than 0.82. For RIP720, correlations were generally higher for data acquired on 2 Aug 2020, while no significant correlation between VIs and \({\psi }_{\mathrm{leaf}}\) was found on 26 July 2020. Similarly, for the 2018 RIP720 flights, data acquired in later growing season showed higher correlation than the earlier days. The structural indices were only highly correlated with \({\psi }_{\mathrm{leaf}}\) on the second day (5 Aug 2018), with most correlations higher than 0.6, while greenness index, e.g. GNDVI, and chlorophyll index, e.g. NDRE, had stable performance in two days, with r > 0.64. This shows that canopy structure indices were less sensitive to the vine water stress status than chlorophyll indices.
We also found that the weather variables including air temperature and VPD had a significant linear relationship with \({\psi }_{\mathrm{leaf}}\) across multiple vineyards and days (Fig. 3). The R2 between them versus \({\psi }_{\mathrm{leaf}}\) were highest for air temperature (R2 = 0.59). For this particular scenario, higher air temperature was found to enhance water stress by 0.055 in \({\psi }_{\mathrm{leaf}}\) (MPa) per °C increase in temperature based on the univariate regression. VPD also explained more than 50% of variations across days and vineyards. Higher VPD lead to higher water stress in grapevines. 1 kPa increase of VPD would increase \({\psi }_{\mathrm{leaf}}\) by 0.214 MPa.

Relationships between the measured leaf water potential (\({\psi }_{\mathrm{leaf}}\)) and a air temperature and b vapor pressure deficit averaged at noon (12:00–14:00) from the nearby weather stations. The linear regression lines from all site-dates were shown as solid lines
Estimating \({{\varvec{\psi}}}_{\mathbf{l}\mathbf{e}\mathbf{a}\mathbf{f}}\) based on machine learning models
When pooling the data across all days and over the three vineyard blocks, the recursive feature elimination process resulted in a total of 10 variables to be included for the final \({\psi }_{\mathrm{leaf}}\) models. Selected weather variables include air temperature and VPD, and VIs included NDRE, PSRI, EVI, GRVI, SAVI and SR. Two machine learning models, RF and XGB, outperformed other models (Table 4). The predicted \({\psi }_{\mathrm{leaf}}\) by the RF full model agreed well with the measurements (Fig. 4), explaining more than 78% of variance in the independent testing data, with a RMSE of 0.123 (±0.03) MPa and a MAE of 0.100 (±0.026) MPa (Fig. 4; Table 4). Other regression models had R2 lower than 0.67. The RF model performed slightly better than the XGB model and therefore was used for the following analysis.

The comparison between the measured values of leaf water potential (\({\psi }_{\mathrm{leaf}}\)) and the estimation from the random forest full model for the training dataset and testing dataset, respectively. Ground measurements from multiple dates and three vineyards were randomly split into training (80%, n = 45, open circles, dashed line) and testing (20%, n = 12, solid squares, solid line)
We found that removing weather variables from the input variables, i.e., models with only remote sensing inputs, significantly reduced the prediction accuracy across all models (Table 4). For example, the RF model without weather variables only explained 52% of spatial and temporal variation in the observed \({\psi }_{\mathrm{leaf}}\) and resulted in higher uncertainty as shown by higher RMSE of 0.189 MPa and MAE of 0.146 MPa. The robustness of the model also decreased, as shown by the increase of the standard deviation of the statistics from the repeated fivefold validation (Table 4). When further excluding the remote sensing metrics related to the red edge bands, the reduced RF models could only explain 48% of spatial and temporal variation in \({\psi }_{\mathrm{leaf}}\) (Table 4). We also found that the decrease in the prediction capability of the reduced models was most significant for SVM and stepwise linear regression approaches.
Variable importance and determinants of \({{\varvec{\psi}}}_{\mathbf{l}\mathbf{e}\mathbf{a}\mathbf{f}}\)
Based on the RF full model, we found that the weather variables, including mean air temperature and VPD at noon, were the most important predictors, followed by the chlorophyll indices NDRE and PSRI (Fig. 5). The average RMSE across all decision trees would increase by 0.75 and 0.70 MPa when excluding air temperature or VPD from the full RF model, respectively. When NDRE (or PSRI) was not included in the RF model, the mean RMSE of the predicted leaf water potential would increase by 0.32 MPa (or 0.24 MPa).

The variable importance plots for a the full model and two reduced models by b excluding weather variables and by c further excluding RedEdge metrics, as shown in Table 4. X-axis represents the variable importance measured by the mean increase in node purity
In the reduced model without weather variables, the greenness index GRVI and the chlorophyll index NDRE became most important. Excluding GRVI or NDRE from the NoWeather model would result in an increase of RMSE of 0.95 and 0.72 MPa, respectively. Their importance was much higher than NIR, EVI and PSRI, with mean RMSE increase ranging from 0.32 to 0.55.
In the reduced model without weather and red edge variables, the greenness index GRVI, and the canopy structure-related band and index NIR and EVI became dominant for estimating \({\psi }_{\mathrm{leaf}}\). The mean RMSE across all trees would increase by 0.91, 0.78 and 0.50 MPa when GRVI, NIR and EVI were not included.
The ICE plot based on the RF full model further illustrated the marginalized impact of key variables on the \({\psi }_{\mathrm{leaf}}\) (Fig. 6). Warmer temperature was shown to increase water stress only slightly when the air temperature at noon was below 27.5 °C, but enhanced water stress dramatically beyond 27.5 °C (Fig. 6a). Similarly, higher VPD enhanced water stress as well, with the highest impacts between 2.5 and 3.0 kPa (Fig. 6b). The rapid increase of water stress beyond 27.5 °C and 2.5 kPa were constant over all samples. Among the VIs, we found that higher NDRE and higher EVI were associated with lower \({\psi }_{\mathrm{leaf}}\). The water stress decreased rapidly when NDRE reached 0.43 and 0.53 (Fig. 6c). The water stress generally decreased with the increase of EVI, especially when EVI was above 0.78. Decreased water stress was also observed when EVI reached 0.6 and 0.65 over part of samples, while there were some exceptions that don’t have similar patterns.

The individual conditional expectation plot of the leaf water potential (\({\psi }_{\mathrm{leaf}}\)) on a air temperature, b vapor pressure deficit (VPD), c Normalized Difference RedEdge Index (NDRE), and d Enhanced Vegetation Index (EVI). The grey lines represent the dependence of the predicted \({\psi }_{\mathrm{leaf}}\) on a variable for each sample separately. Red lines representing the average dependence of the \({\psi }_{\mathrm{leaf}}\) on a variable of all samples
\({{\varvec{\psi}}}_{\mathbf{l}\mathbf{e}\mathbf{a}\mathbf{f}}\) mapping and analysis of the predicted \({{\varvec{\psi}}}_{\mathbf{l}\mathbf{e}\mathbf{a}\mathbf{f}}\)
The \({\psi }_{\mathrm{leaf}}\) map predicted by the RF full model using the UAV imagery and weather data showed a large spatial heterogeneity over the RIP720 vineyard (Fig. 7). The estimated median \({\psi }_{\mathrm{leaf}}\) of block T1 and T2 were around −1.54 and −1.58 MPa on July 12th, 2018, significantly lower than the median \({\psi }_{\mathrm{leaf}}\) of −1.48 and −1.52 MPa over blocks T3 and T4 (Fig. 7a). Similarly, on August 5th, 2018, blocks T1 and T2 were more stressed than T3 and T4, with a median \({\psi }_{\mathrm{leaf}}\) of −1.60 vs. −1.53 MPa (Fig. 7b). This was consistent with the irrigation treatments that less water was applied to block T1 and T2 in 2018. In 2020, the majority of T1 showed less water stress level than the other three blocks on both days (Fig. 7c, d). This also agreed well with the different irrigation treatment in 2020 applied to block T1.

Maps of the predicted leaf water potential (\({\psi }_{\mathrm{leaf}}\)) based on the random forest full model for the RIP720 vineyard during two IOP dates in 2018, a July 12th and b August 15th and two IOP dates in 2020, c July 26th and d August 2nd. Also shown are the locations of ground sampled vines
The predicted \({\psi }_{\mathrm{leaf}}\) maps also captured the overall temporal dynamics of \({\psi }_{\mathrm{leaf}}\) (Figs. 7 and 8), consistent with the patterns observed by the ground measurements over the sampled vines. The block T1 and T2 were more stressed in August than July in 2018 (Figs. 7a, b and 8), due to deficit irrigation strategy typically implemented later in the season. In contrast, all four blocks recovered from water stress between July 26th to August 2nd after the intensive irrigation in 2020. Although in the predicted maps, we found T2 were more stressed than T3 and T4 in 2020, which was different from the irrigation plan. This is likely because the sampled vines did not well represent the within block distribution of estimated \({\psi }_{\mathrm{leaf}}\) (Figs. 7d, 9), especially due to the limited samples within each block over each sample day, with sample sizes ranging from 6 to 12. For example, the ground measurements of \({\psi }_{\mathrm{leaf}}\) on July 12, 2018 (Fig. 9a) and on July 26, 2020 (Fig. 9c) ranged from −1.67 to −1.48 MPa, and −1.65 to −1.55 MPa, respectively, while the predicted \({\psi }_{\mathrm{leaf}}\) showed that there were some less stressed vines, which had \({\psi }_{\mathrm{leaf}}\) higher than −1.48 and −1.55 MPa.

The statistics of leaf water potential (\({\psi }_{\mathrm{leaf}}\)) over each block in the RIP720 vineyard during four IOPs, based on random forest model estimation over all vines, using UAV imagery and weather data. Each boxplot shows the minimum, 1st quantile, medium, 3rd quantile, and maximum values of the \({\psi }_{\mathrm{leaf}}\)

Comparison of the field-level distribution of the predicted leaf water potential (\({\psi }_{\mathrm{leaf}}\)) based on the random forest full model with the ground measurement values over individual sampled vines (red arrows). Results were shown for four IOPs in the RIP720 vineyard: a 2018-07-12; b 2018-08-05; c 2020-07-26; d 2020-08-02
Discussion
Capability of machine learning models driven by UAV imagery
Our study demonstrated that the multispectral imageries and weather information can be integrated into a machine learning model to capture the spatial and temporal variability of \({\psi }_{\mathrm{leaf}}\) across different vineyards. The unified random forest full model based on UAV multispectral imageries and weather variables were shown to perform well over three vineyards with different varieties, soils, and spacing, and blocks of varying irrigation treatments. The assessment with independent validation data showed better or similar accuracy (R2 of 78%, RMSE of 0.122 MPa and MAE of 0.099 MPa), than those reported by other vineyard studies with multi-spectral UAV imagery. In the current literature, Romero et al. (2018) sampled 16 vines in one single vineyard in China for each one of the 5 days, and built an ANN machine learning model to estimate \({\psi }_{\mathrm{stem}}\) from UAV multispectral images with an RMSE = 0.32 MPa and MAE = 0.35 MPa for the validation set (20% of the total data points). Another ANN study (Poblete et al. 2017) with a larger sample size (90 vines over three days, and 20% were used for validation) over a Carmenere vineyard in Chile had a similar uncertainty for the validation set (RMSE = 0.12 MPa and MSE = 0.1 MPa).
Impacts of weather and red edge metrics on water stress level estimation
Our RF modeling analysis highlighted the importance of incorporating weather variables, including noontime mean air temperature and VPD to capture water stress level through time and across multiple vineyards. This finding is supported by the concept of the soil–plant-atmosphere continuum (Elfving et al. 1972), governing the plant water stress level as quantified by the \({\psi }_{\mathrm{leaf}}\). Suter et al. (2019) suggested that to allow for temporal comparisons of plant water potential, a standardization of plant water potential with both soil water availability and weather conditions is required. Similarly, studies have been conducted to build a baseline \({\psi }_{\mathrm{leaf}}\) or \({\psi }_{\mathrm{stem}}\) as a function of VPD to interpret the measurements and manage irrigation for prune (McCutchan and Shackel 1992), almond (Shackel et al. 1997) and grapevine (Williams and Baeza 2007; Olivo et al. 2009). The calculation of CWSI also includes the weather conditions. The lower baseline of CWSI was determined by the relationship between VPD and the difference of canopy and air temperature of well-watered plants (Jackson et al. 1981).
We also found that the remote sensing metrics involving the red edge spectral band further increased the capability of estimating vine water stress. The red edge band and indices have been reported to be associated with chlorophyll content and physiological status (Barnes et al. 2000; Clevers et al. 2010; Clevers and Gitelson 2013). As low chlorophyll content usually reflects that the plants are under stress, the red edge based indices have been applied to detect various plant stressors. For example, NDRE effectively captured the variability of nitrogen status in wheat (Tilling et al. 2007) and detected charcoal rot disease in soybean (Brodbeck et al. 2017) and water deficiency in maize (Becker et al. 2020).
Uncertainties and future work
Although promising as a proof of concept, our results are limited by the available ground measurements due to the challenging in collecting \({\psi }_{\mathrm{leaf}}\) with pressure chambers in the field and constrained by the number and diversity of the sampled vineyards. To further test and improve the robustness of the model, more field survey data and concurrent UAV flights are needed to represent a broader range of vineyards, environmental conditions, and water stress levels. For example, more samples over different cultivars and trailing systems will allow us to examine how other factors may affect the model performance. Given a sufficient number of ground truth data covering various water status, machine learning based classification approach can also be developed to detect the categorical stress levels, e.g., from low, moderate, to severe stress to guide irrigation management.
Our study only used optical metrics derived from five spectral bands available from the MicaSense camera. Unlike thermal data, the VIs generated from UAV multispectral data can only detect water stress levels indirectly and thus have certain limitations. For example, the VIs have been reported to perform differently when predicting the grapevine water stress levels for different cultivars and different growth stages. For example, widely-used canopy structure index NDVI was found to have high correlation with \({\psi }_{\mathrm{stem}}\) (Baluja et al. 2012) of rain-fed Tempranillo vines, with R2 = 0.68, but had relatively low correlation with stomatal conductance (R2 = 0.32) of subsurface-irrigated Cabernet Sauvignon vines (Espinoza et al. 2017) and \({\psi }_{\mathrm{stem}}\) (R2 = 0.35) of drip-irrigated Carmenere vines (Poblete et al. 2017). Chlorophyll index TCARI/OSAVI was reported to have high correlation with \({\psi }_{\mathrm{stem}}\) (R2 = 0.68) of rain-fed Tempranillo vines, but not significant correlation with \({\psi }_{\mathrm{stem}}\) (R2 = 0.09, p > 0.05) for drip-irrigated Carmenere vines (Poblete et al. 2017).
We also found different performances of VI-based approaches across vineyards. In BAR007 and BAR012, the different water stress levels among different vines were probably caused more by different topography, soil conditions, cultivars, and long-term irrigation strategies. These long-term factors contributed to distinct plant physiological variables among different vines, which can be well captured by VIs. For example, topography likely affects the spatial heterogeneity of vine growth and size. The steeper slopes may result in more runoff and less soil water retention (Brillante et al. 2018), while aspects affect the amount of solar radiation received by the vines (Biss 2020). In the RIP720 vineyard, the different water stress levels were caused by relatively short-term irrigation treatments, thus the relationships between VIs and \({\psi }_{\mathrm{leaf}}\) were less significant and these shorter stress events as noted earlier can only be determined if thermal data are available (Knipper et al. 2019). Several studies have used multispectral and hyperspectral cameras that can measure photochemical reflectance index (PRI), solar-induced fluorescence (SIF), water index (WI) to detect plant water stress (Peñuelas et al. 1997; Zarco-Tejada et al. 2012, 2013). Adding spectral reflectance and VIs from additional spectral and thermal bands will further improve the capability of remote monitoring water stress.
We recognize that the UAV imaging is constrained by the limited payload and processing a large data volume of super high resolution aerial imagery can be time consuming or costly, despite the availability of commercial drone imagery processing software such as Pix4D. Therefore, the UAV based approach can be rather challenging to scale it up for operational water stress mapping at a larger scale. To address this scalability issue, an important next step is to combine less frequent but high spatial resolution imagery from UAV systems or satellites such as PlanetScope with more frequent moderate resolution imagery from Landsat and Sentinel 2 satellite series (Houborg and McCabe 2018). The data fusion from multiple sensors will allow for mapping vine water stress more frequently throughout the growing season. One important consideration is the spectral configuration of different sensors. Radiometric consistency across cameras should always be evaluated to correct for potential biases between reflectance observed from different remote sensing systems; or the machine learning models need to be re-trained using the imagery from different systems.
Potential applications for irrigation management
By combing UAV based multispectral data and weather information, the unified machine learning model, once trained and validated, can estimate the grapevine water stress level at 8 cm scale across the whole field of any vineyards in the region. This approach can potentially supplement the traditional ground measurements of \({\psi }_{\mathrm{leaf}}\) over sampled vines with pressure chambers, and scale up to capture the within-field spatial heterogeneity in a timely and efficient way. With the water stress level map produced with the model and remote sensing imagery, the growers can design the informed irrigation zones and manage their irrigation schedule more precisely. One of the key remaining issues is how quickly one can generate these leaf water potential maps and make it available to the growers.
Conclusion
We developed and tested the capability of UAV systems for monitoring water status in three commercial vineyards in California, USA. We found that the models based on remote sensing only metrics cannot be generalized across the vineyards. The RF model was built to estimate \({\psi }_{\mathrm{leaf}}\) at 8 cm, using ground measurements from all fields and all dates, the corresponding remote sensing metrics from high resolution imagery from the Micasense Rededge multispectral camera, and weather data. Our validation with independent testing data showed that the RF full model can predict \({\psi }_{\mathrm{leaf}}\) well with a R2 of 0.778, RMSE of 0.123 MPa, and MAE of 0.100 MPa. The weather variables including air temperature and VPD were critical for capturing the large scale variability, i.e., across vineyards and across dates. The red edge band, however, provided important information for the within field variability of \({\psi }_{\mathrm{leaf}}\). The \({\psi }_{\mathrm{leaf}}\) map produced with the RF model was able to capture both temporal and spatial variability of water stress level of the vineyard, consistent with irrigation management and patterns observed from the ground sampling. Our results demonstrated the potential of the multi-spectral UAV system for providing data-driven information to guide precision irrigation management.
Availability of data
The data that support the findings of this study are available from the corresponding author, upon reasonable request.
Code availability
The code that was used for data analysis in the current study is available on request from the corresponding author.
Notes
Mention of trade names or commercial products in this publication is solely for the purpose of providing specific information and does not imply recommendation or endorsement by the U.S. Department of Agriculture.
Mention of trade names or commercial products in this publication is solely for the purpose of providing specific information and does not imply recommendation or endorsement by the U.S. Department of Agriculture.
References
Acevedo-Opazo C, Tisseyre B, Guillaume S, Ojeda H (2008) The potential of high spatial resolution information to define within-vineyard zones related to vine water status. Precision Agric 9(5):285–302
Arribas-Bel D, Patino JE, Duque JC (2017) Remote sensing-based measurement of living environment deprivation: improving classical approaches with machine learning. PLoS One 12(5):e0176684
Baluja J, Diago MP, Balda P, Zorer R, Meggio F, Morales F, Tardaguila J (2012) Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV). Irrig Sci 30(6):511–522
Barnes EM, Clarke TR, Richards SE, Colaizzi PD, Haberland J, Kostrzewski M, et al. (2000, July) Coincident detection of crop water stress, nitrogen status and canopy density using ground based multispectral data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA (Vol. 1619)
Becker T, Nelsen TS, Leinfelder-Miles M, Lundy ME (2020) Differentiating between nitrogen and water deficiency in irrigated maize using a UAV-based multi-spectral camera. Agronomy 10(11):1671
Bellvert J, Zarco-Tejada PJ, Girona J, Fereres E (2014) Mapping crop water stress index in a ‘Pinot-noir’ vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precision Agric 15(4):361–376
Bellvert J, Jofre-Ĉekalović C, Pelechá A, Mata M, Nieto H (2020) Feasibility of using the two-source energy balance model (TSEB) with Sentinel-2 and Sentinel-3 images to analyze the spatio-temporal variability of vine water status in a vineyard. Remote Sensing 12(14):2299
Biss AJ (2020) Impact of vineyard topography on the quality of Chablis wine. Aust J Grape Wine Res 26(3):247–258
Brillante L, Mathieu O, Lévêque J, van Leeuwen C, Bois B (2018) Water status and must composition in grapevine cv. Chardonnay with different soils and topography and a mini meta-analysis of the δ13C/water potentials correlation. J Sci Food Agric 98(2):691–697
Brodbeck C, Sikora E, Delaney D, Pate G, Johnson J (2017) Using unmanned aircraft systems for early detection of soybean diseases. Adv Anim Biosci 8(2):802–806
Calderón R, Navas-Cortés JA, Zarco-Tejada PJ (2015) Early detection and quantification of verticillium wilt in olive using hyperspectral and thermal imagery over large areas. Remote Sens 7(5):5584–5610
CDFA (2020) California Agricultural Statistics Review. California Department of Food and Agriculture. https://www.cdfa.ca.gov/Statistics/PDFs/2020_Ag_Stats_Review.pdf. Accessed 27 Oct 2021
Chen JM (1996) Evaluation of vegetation indices and a modified simple ratio for boreal applications. Can J Remote Sens 22(3):229–242
Choné X, Van Leeuwen C, Dubourdieu D, Gaudillère JP (2001) Stem water potential is a sensitive indicator of grapevine water status. Ann Bot 87(4):477–483
Clark ML (2017) Comparison of simulated hyperspectral HyspIRI and multispectral Landsat 8 and Sentinel-2 imagery for multi-seasonal, regional land-cover mapping. Remote Sens Environ 200:311–325
Clevers JG, Gitelson AA (2013) Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and-3. Int J Appl Earth Obs Geoinf 23:344–351
Clevers JG, Kooistra L, Schaepman ME (2010) Estimating canopy water content using hyperspectral remote sensing data. Int J Appl Earth Obs Geoinf 12(2):119–125
Elfving DC, Kaufmann MR, Hall AE (1972) Interpreting leaf water potential measurements with a model of the soil-plant-atmosphere continuum. Physiol Plant 27(2):161–168
Espinoza CZ, Khot LR, Sankaran S, Jacoby PW (2017) High resolution multispectral and thermal remote sensing-based water stress assessment in subsurface irrigated grapevines. Remote Sensing 9(9):961
Famiglietti JS (2014) The global groundwater crisis. Nat Clim Change 4(11):945–948
Garnier E, Berger A (1985) Testing water potential in peach trees as an indicator of water stress. J Hortic Sci 60(1):47–56
Ghatkar JG, Singh RK, Shanmugam P (2019) Classification of algal bloom species from remote sensing data using an extreme gradient boosted decision tree model. Int J Remote Sens 40(24):9412–9438
Gitelson AA, Merzlyak MN (1998) Remote sensing of chlorophyll concentration in higher plant leaves. Adv Space Res 22(5):689–692
Goldstein A, Kapelner A, Bleich J, Pitkin E (2015) Peeking inside the black box: Visualizing statistical learning with plots of individual conditional expectation. J Comput Graph Stat 24(1):44–65
Helman D, Bahat I, Netzer Y, Ben-Gal A, Alchanatis V, Peeters A, Cohen Y (2018) Using time series of high-resolution planet satellite images to monitor grapevine stem water potential in commercial vineyards. Remote Sens 10(10):1–22
Houborg R, McCabe MF (2018) A cubesat enabled spatio-temporal enhancement method (cestem) utilizing planet, landsat and modis data. Remote Sens Environ 209:211–226
Huete AR (1988) A soil-adjusted vegetation index (SAVI). Remote Sens Environ 25(3):295–309
Huete A, Didan K, Miura T, Rodriguez EP, Gao X, Ferreira LG (2002) Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens Environ 83(1–2):195–213
Wine Institute (2020) California & US Wine Sales. https://wineinstitute.org/our-industry/statistics/california-us-wine-sales. Accessed 27 Oct 2021
Intrigliolo DS, Castel JR (2007) Evaluation of grapevine water status from trunk diameter variations. Irrig Sci 26(1):49–59
Jackson RD, Idso SB, Reginato RJ, Pinter PJ Jr (1981) Canopy temperature as a crop water stress indicator. Water Resour Res 17(4):1133–1138
Kandylakis Z, Karantzalos K (2016) Precision viticulture from multitemporal, multispectral very high resolution satellite data. Int Arch Photogramm Remote Sens Spatial Inf Sci ISPRS Arch 41:919–925
Kaufman YJ, Tanre D (1992) Atmospherically resistant vegetation index (ARVI) for EOS-MODIS. IEEE Trans Geosci Remote Sens 30(2):261–270
Knipper KR, Kustas WP, Anderson MC, Alsina MM, Hain CR, Alfieri JG et al (2019) Using high-spatiotemporal thermal satellite ET retrievals for operational water use and stress monitoring in a California vineyard. Remote Sens 11(18):2124
Kuhn M (2008) Building predictive models in R using the caret package. J Stat Softw 28(5):1–26
Kustas WP, Anderson MC, Alfieri JG, Knipppper K, Torres-Rua A, Parry CK, Nieto H, Agam N, White WA, Gao F, McKee L, Prueger JH, Hipppps LE, Los S, Alsina MM, Sanchez L, Sams B, Dokoozlian N, McKee M et al (2018) The grape remote sensing atmospheric profile and evapotranspiration experiment. Bull Am Meteor Soc 99(9):1791–1812
Leahy TC (2015) Desperate times call for sensible measures: The making of the California Sustainable Groundwater Management Act. Golden Gate Univ Environ Law J 9:5
Lemmens A, Croux C (2006) Bagging and boosting classification trees to predict churn. J Mark Res 43(2):276–286
Mall NK, Herman JD (2019) Water shortage risks from perennial crop expansion in California’s Central Valley. Environ Res Lett 14(10):104014
McCutchan H, Shackel KA (1992) Stem-water potential as a sensitive indicator of water stress in prune trees (Prunus domestica L. cv. French). J Am Soc Hortic Sci 117(4):607–611
Merzlyak MN, Gitelson AA, Chivkunova OB, Rakitin VY (1999) Non-destructive optical detection of pigment changes during leaf senescence and fruit ripening. Physiol Plant 106(1):135–141
Meyer GE, Neto JC (2008) Verification of color vegetation indices for automated crop imaging applications. Comput Electron Agric 63(2):282–293
Moser G, Serpico SB (2009) Automatic parameter optimization for support vector regression for land and sea surface temperature estimation from remote sensing data. IEEE Trans Geosci Remote Sens 47(3):909–921
Motohka T, Nasahara KN, Oguma H, Tsuchida S (2010) Applicability of green-red vegetation index for remote sensing of vegetation phenology. Remote Sens 2(10):2369–2387
Olivo N, Girona J, Marsal J (2009) Seasonal sensitivity of stem water potential to vapour pressure deficit in grapevine. Irrig Sci 27(2):175–182
Ortuño MF, García-Orellana Y, Conejero W, Ruiz-Sánchez MC, Alarcón JJ, Torrecillas A (2006) Stem and leaf water potentials, gas exchange, sap flow, and trunk diameter fluctuations for detecting water stress in lemon trees. Trees Struct Funct 20(1):1–8
Otsu N (1979) A tlreshold selection method from gray-level histograms. IEEE Trans Syst Man Cybern 20(1):62–66
Pasolli L, Notarnicola C, Bruzzone L (2011) Estimating soil moisture with the support vector regression technique. IEEE Geosci Remote Sens Lett 8(6):1080–1084
Peñuelas J, Pinol J, Ogaya R, Filella I (1997) Estimation of plant water concentration by the reflectance water index WI (R900/R970). Int J Remote Sens 18(13):2869–2875
Pham TD, Le NN, Ha NT, Nguyen LV, Xia J, Yokoya N, To TT, Trinh HX, Kieu LQ, Takeuchi W (2020) Estimating mangrove above-ground biomass using extreme gradient boosting decision trees algorithm with fused sentinel-2 and ALOS-2 PALSAR-2 data in can Gio biosphere reserve, Vietnam. Remote Sens 12(5):777
Poblete T, Ortega-Farías S, Moreno M, Bardeen M (2017) Artificial neural network to predict vine water status spatial variability using multispectral information obtained from an unmanned aerial vehicle (UAV). Sensors 17(11):2488
Rodríguez-Pérez JR, Riaño D, Carlisle E, Ustin S, Smart DR (2007) Evaluation of hyperspectral reflectance indexes to detect grapevine water status in vineyards. Am J Enol Vitic 58(3):302–317
Romero M, Luo Y, Su B, Fuentes S (2018) Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput Electron Agric 147:109–117
Rouse JW, Haas RH, Schell JA, Deering DW (1974) Monitoring vegetation systems in the Great Plains with ERTS. NASA Special Publ 351(1974):309
Sagi O, Rokach L (2018) Ensemble learning: a survey. Wiley Interdiscip Rev Data Min Knowl Discov 8(4):e1249
Shackel KA, Ahmadi H, Biasi W, Buchner R, Goldhamer D, Gurusinghe S et al (1997) Plant water status as an index of irrigation need in deciduous fruit trees. HortTechnology 7(1):23–29
Strobl C, Boulesteix AL, Kneib T, Augustin T, Zeileis A (2008) Conditional variable importance for random forests. BMC Bioinf 9(1):1–11
Suter B, Triolo R, Pernet D, Dai Z, Van Leeuwen C (2019) Modeling stem water potential by separating the effects of soil water availability and climatic conditions on water status in grapevine (Vitis vinifera L.). Front Plant Sci 10:1485
Tilling AK, O’Leary GJ, Ferwerda JG, Jones SD, Fitzgerald GJ, Rodriguez D, Belford R (2007) Remote sensing of nitrogen and water stress in wheat. Field Crop Res 104(1–3):77–85
Tuia D, Verrelst J, Alonso L, Pérez-Cruz F, Camps-Valls G (2011) Multioutput support vector regression for remote sensing biophysical parameter estimation. IEEE Geosci Remote Sens Lett 8(4):804–808
Williams LE, Araujo FJ (2002) Correlations among predawn leaf, midday leaf, and midday stem water potential and their correlations with other measures of soil and plant water status in Vitis vinifera. J Am Soc Hortic Sci 127(3):448–454
Williams LE, Baeza P (2007) Relationships among ambient temperature and vapor pressure deficit and leaf and stem water potentials of fully irrigated, field-grown grapevines. Am J Enol Vitic 58(2):173–181
Xue J, Su B (2017) Significant remote sensing vegetation indices: a review of developments and applications. J Sens. https://doi.org/10.1155/2017/1353691
Yang Y, Cao C, Pan X, Li X, Zhu X (2017) Downscaling land surface temperature in an arid area by using multiple remote sensingindices with random forest regression. Rem Sens 9(8):789
Zarco-Tejada PJ, González-Dugo V, Berni JA (2012) Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens Environ 117:322–337
Zarco-Tejada PJ, Guillén-Climent ML, Hernández-Clemente R, Catalina A, González MR, Martín P (2013) Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric For Meteorol 171:281–294
Zhou X, Zhu X, Dong Z, Guo W (2016) Estimation of biomass in wheat using random forest regression algorithm and remote sensing data. Crop J 4(3):212–219
Acknowledgements
The authors would like to thank the many researchers within the USDA and other governmental agencies, university collaborators, and industry partners who have contributed to the GRAPEX project. Specifically, the authors would like to thank E.&J. Gallo Winery for financial and logistical support and the staff of Viticulture, Chemistry, and Enology Division of E.&J. Gallo Winery for their assistance with data collection. The authors would like to acknowledge financial support for GRAPEX from NASA [NNH16ZDA001N-WATER] and USDA. In addition, we wish to extend our special thanks to Brady Wainio and Huizhi Yang for the field assistance. USDA is an equal opportunity provider and employer.
Funding
This work is supported by AFRI Competitive Grant no. 2020-67021-32855/project accession no. 1024262 from the USDA National Institute of Food and Agriculture. This grant is being administered through AIFS: the AI Institute for Next Generation Food Systems https://aifs.ucdavis.edu. Z. Tang was also partially supported by the AmericaView.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Tang, Z., Jin, Y., Alsina, M.M. et al. Vine water status mapping with multispectral UAV imagery and machine learning. Irrig Sci 40, 715–730 (2022). https://doi.org/10.1007/s00271-022-00788-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00271-022-00788-w