
Abstract
Many theories and communication models developed from terrestrial studies focus on a simple dyadic exchange between a sender and receiver. During social interactions, the “frequency code” hypothesis suggests that frequency characteristics of vocal signals can simultaneously encode for static signaler attributes (size or sex) and dynamic information, such as motivation or emotional state. However, the additional presence of a bystander may result in a change of signaling behavior if the costs and benefits associated with the presence of this bystander are different from that of a simple dyad. In this study, two common humpback whale social calls (“wops” and “grumbles”) were tested for differences related to group social behavior and the presence of bystanders. “Wop” parameters were stable with group social behavior, but were emitted at lower (14 dB) levels in the presence of a nearby singing whale compared to when a singing whale was not in the area. “Grumbles” were emitted at lower (30–39 Hz) fundamental frequencies in affiliative compared to non-affiliative groups and, in the presence of a nearby singing whale, were also emitted at lower (14 dB) levels. Vocal rates did not significantly change. The results suggest that, in humpbacks, the frequency in certain sound types relates to the social behavior of the vocalizing group, implying a frequency code system. The presence of a nearby audible bystander (a singing whale) had no effect on this frequency code, but by reducing their acoustic level, the signal-to-noise ratio at the singer would have been below 0, making it difficult for the singer to audibly detect the group.
Significance statement
The frequency, duration, and amplitude parameters of humpback whale social vocalizations were tested between different social contexts: group social behavior (affiliating versus non-affiliating), the presence of a nearby singing whale, and the presence of a nearby non-singing group. “Grumbles” (commonly heard low-frequency unmodulated sounds) frequencies were lower in affiliating groups compared to non-affiliating groups, suggesting a change in group motivation (such as levels of aggression). “Wop” (another common sound type) structure (frequency and duration) was similar in affiliating and non-affiliating groups. In the presence of an audible bystander (a singing whale), both sound types were emitted at similar rates, but much lower amplitudes (14 dB), vastly reducing the detectability of these sounds by the singer. This suggests that these groups were acoustically avoiding the singing whale. They did not, however, acoustically respond to the presence of a nearby non-singing group.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Historically, theories and models developed from studies in animal communication were based on a dyad of one sender and one receiver (McGregor and Dabelsteen 1996). The underlying assumption in these studies was that communication was defined by the transmission of information by one individual (the sender) to another individual (the receiver) who uses the information to influence its decisions or behavior (Bradbury and Vehrencamp 1998). The “frequency code hypothesis” suggests that certain features of a vocal signal can encode static information on caller attributes such as size while simultaneously encoding dynamic information such as motivation (Ohala 1984; for extensive review, see Taylor and Reby 2010). Static signaler information, such as size or sex, should therefore be reflected in static signal components (Fitch 1997; Reby et al. 1999; Reide and Fitch 1999; Reby and McComb 2003; Harris et al. 2006; Lemasson et al. 2009). Dynamic motivational information, relating to the social context of the signaler, can also be encoded in certain flexible structural features of the sound (Poole et al. 1988; Fischer et al. 2002; Notman and Rendell 2005; Suigiura 2007; Soltis et al. 2011). This static–dynamic coding system has been shown to exist in various taxa. By-product “static” components, such as formants, can indicate the signaler’s body size, weight, or dominance rank (e.g., male fallow deer, Dama dama: Vannoni and McElligott 2008; Charlton and Reby 2011; baboons, Papio cynocephalus ursinus: Fischer et al. 2004; and domestic dogs, Canis familiaris: Taylor et al. 2011). Dynamic features of calls have been found to encode motivational cues in species such as the domestic piglet, Sus scrofa domestica (Linhart et al. 2015); the African elephant, Loxodonta Africana (McComb et al. 2003; Soltis et al. 2009); and spotted hyenas, Crocuta crocuta (Theis et al. 2007). Levels of arousal, for example, may be encoded in parameters such as call rate (e.g., red deer: Clutton-Brock and Albon 1979), amplitude (e.g., the domestic piglet, S. scrofa domestica: Linhart et al. 2015; the African elephant, L. Africana: Soltis et al. 2011), and frequency (e.g., the domestic horses, Equus caballus, Briefer et al. 2015; Geoffroy’s spider monkeys, Ateles geoffroyi: Ordonez-Gomez et al. 2015).
Many previous studies have shown that vocal communication is not a simple dyadic exchange between a sender and receiver, but is a communication network involving a potential “audience” (for an extensive review, see Fichtel and Manser 2010). This “audience” may or may not be the intended recipients of the signal. There are numerous examples of this in various taxa ranging from Siamese fighting fish (Betta spendens), who modify their dyadic display behavior depending on the sex of the audience (Doutrelant et al. 2001; Dzieweczynski et al. 2005; Dzieweczynski and Walsh 2011), to chimpanzees (Pan troglodytes; Townsend and Zuberbühler 2009; Fedurek et al. 2013), which are thought to understand third-party relationships, or “triadic awareness” (Slocombe and Zuberbühler 2007). “Private” signals are defined as being quiet signals that attenuate over distance (Dabelsteen 2005) and therefore usually used for close-range communication between conspecifics. Social calls that are used to mediate group affiliations (Cheney et al. 1995; Fedurek et al. 2013) and promote group cohesion (Palombit 1992; Holland et al. 1998; Dabelsteen 2005; Riesch et al. 2008) fall into this category of vocal signaling. Although vocal signals between a sender and receiver may be assumed to be “private,” within the signal range, information from the signal may be available to other individuals not directly involved in the group. The presence of these other receivers (or “bystanders”) may result in a change of signaling behavior if the costs and benefits associated with the presence of an audience are different from that within a simple dyad (Marler et al. 1986; McGregor and Peake 2000). These bystanders could be considered to be “eavesdroppers” if unintended information is passed on (McGregor et al. 1999; Dabelsteen 2005; Peake 2005). Studies in black-capped chickadees (Poecile atricapillus), for example, found that males tended to eavesdrop on vocal interactions outside their own territories (Fitzsimmons et al. 2008) and then used the information gained to modify their own behavior (Vignal et al. 2004).
Humpback whales are a particularly vocal large baleen whale species in that they “sing” (Payne and McVay 1971) as well as produce a large number of different non-song vocal sounds (Dunlop et al. 2007). Humpback whale song is a male-only signal (Darling et al. 1983; Glockner 1983; Baker 1994; Darling and Bérubé 2001), defined as being long, complex, repetitive, and highly stereotyped (Payne et al. 1983; Cato 1991) and produced at a high acoustic level, therefore audible over tens of kilometers (Au et al. 2006). Non-song “social vocalizations” in humpback whales are not clearly structured like song as they have no serial patterning and are heard as single sounds or in short bursts (Tyack 1983; Tyack and Whitehead 1983; Silber 1986; Dunlop et al. 2007; Rekdahl et al. 2015). Humpback whales utilize an extremely variable catalogue of social vocalizations, from almost infra-sonic “grumbles” to high-frequency “chirp”-like sounds (Dunlop et al. 2007), and these sounds are used by both sexes and in closer-range communication compared to song (Dunlop et al. 2008). Although earlier work assumed that these sounds were produced only in aggressive and/or competitive social encounters (Tyack 1983; Tyack and Whitehead 1983; Baker and Herman 1984; Silber 1986), later studies found that they are used in various other social and behavioral contexts, such as between a female and her calf or from single animals that were not part of a group (Dunlop et al. 2008).
During migration, humpback whale social interactions are characterized by frequent changes in group membership (affiliations). These social affiliations, to some extent, are mediated by “social sounds” (Tyack 1983; Tyack and Whitehead 1983; Baker and Herman 1984; Silber 1986; Dunlop et al. 2008). Common social groups during migration and on breeding grounds include lone singing males, “competitive” groups (where a number of males are thought to be competing for access to one female), female–calf pairs with or without a male “escort” (Tyack and Whitehead 1983; Baker and Herman 1984), and adult pairs, some of which are thought to be males “consorting” with non-lactating females (Herman and Antinoja 1977; Darling et al. 1983; Glockner 1983; Clapham et al. 1992; Clapham 1996). Singing whales are sometimes joined by other males (in which case they usually stop singing), or can stop singing and then join other groups (Darling and Bérubé 2001). During the southward migration of the East Australian humpback whale population, instances of singing males joining and continuing to sing when escorting female–calf pairs (“singing escorts”) are often seen (Noad 2002; Smith et al. 2008). This fluid social system provides the opportunity to look for a context-driven dynamic component in vocal coding within a large marine mammal species during social affiliations. Given the variety in humpback whale social group structure, it is likely that attributes of commonly heard non-song vocalizations (such as vocal rate, parameters of the fundamental frequency, and/or the level at which they are produced) change according to the social behavior of the vocalizing group. While these affiliations are taking place, other groups and singing whales are present in the area, forming a potential communication network. Male singing whales (those not involved in the affiliation), if close to the group, could be considered to be “bystanders” as they would be audible to the group, but not involved in the affiliation. Other non-singing groups in the area may or may not be audible to the group depending on how far away they are and whether or not they are emitting audible sounds.
Using observational data, the effect of social behavior on vocal rate, frequency, duration, and level was determined by comparing vocalizations from non-affiliating groups to affiliating groups, taking into account the group social structure. In addition, the presence of nearby singing whales (which would have been audible to the vocalizing group) and other nearby whales or groups of whales was considered to determine whether the presence of bystanders changed this group’s vocal behavior.
Methodology
Visual and acoustic data collection
The eastern Australian population of humpback whales migrates annually along the eastern Australian coastline between feeding areas in the Antarctic and breeding grounds inside the Great Barrier Reef off central Queensland. During their southward migration in particular, they pass close to shore in the vicinity of Peregian Beach, 130 km north of Brisbane on the east coast, where this study was conducted. Data were collected as part of the Humpback Whale Acoustic Research Collaboration (HARC) project during the September/October southward migrations in 2002, 2003, 2004, 2008, and 2009. Additional data were collected as part of the BRAHSS study (Behavioural Response of Australian Humpback Whales to Seismic Surveys) in 2010 and 2011 from the same location.
Land-based observations (including the position, composition, and behaviors) of all migrating groups passing through the study area were collected daily (7 am to 5 pm, weather permitting) from an elevated survey point (73-m elevation). A theodolite (Leica TM 1100) was used in conjunction with a notebook computer running Cyclopes software (E. Kniest, Univ. Newcastle, Australia) to track the groups in real time. Each theodolite fix was time-stamped and the behavior of the fixed whale (e.g., blow, breach, pectoral slap, tail slap, etc.), group composition, direction of travel, and any other notes of interest (e.g., splitting or joining of groups) were recorded with each fix. Observers, using binoculars, made additional notes. These observations were also recorded onto Cyclopes in real time. Weather was noted hourly and observations included sea state, wind speed and direction, cloud cover, glare strength and position, swell height and direction, and rainfall.
Acoustic recordings were made from three to five hydrophone buoys moored in 18–28 m of water and arranged in a line or T-shaped array. Each hydrophone buoy consisted of a surface buoy containing a custom-built pre-amplifier (+20-dB gain) and 41B sonobuoy VHF radio transmitter. A High Tech HTI-96-MIN hydrophone with built-in +40-dB pre-amplifier was suspended approximately 1 m above each buoy’s mooring and its cable ran up the anchor rope to the buoy where it was connected to the pre-amplifier and transmitter. Buoys 1–3 were approximately 750 m apart and were arranged in a line parallel to, and 1.5 km from, the beach. Buoys 4 and 5 were moored seaward from buoy 2 approximately 600 m apart, forming a line perpendicular to that of buoys 1–3. Signals were received onshore at a base station using a directional antenna and type 8101 four-channel sonobuoy receiver. This was connected to a PC; acoustic data were recorded to hard disk via a series E National Instruments Data Acquisition Card and recorded using Ishmael acoustic tracking software (D. Mellinger, Oregon State Univ.) usually at a sampling rate of 22 kHz.
Ishmael was also used to determine the location of sound sources detected. This was achieved by cross-correlation of the same sound arriving at the different hydrophones to determine differences in the arrival time of the sound at the buoys. These differences, together with an accurate knowledge of the positions of the hydrophones (surveyed accurately at the start of each season using cross bearings from two theodolites at known points on the beach), were then used to determine the most likely location of the source (e.g., singing or vocalizing whales). Small errors in determining the time of arrival differences can result in errors in the distance measurements to the source (although the bearing is usually robust). However, sound location accuracy was significantly improved by taking the mean position of several estimates over a brief period and by using more than three buoys (Noad et al. 2004).
Land-based and base station computers were linked in real time using a wireless network. Usually, no more than six groups were migrating through the study area at any one time and, unless interacting with each other (affiliating), were usually more than 1.5 km from each other. Therefore, theodolite tracking from the land-based station paired with acoustic tracking from the base station provided adequate accuracy of position fixing to ensure that there was no ambiguity as to which visually tracked group was vocalizing.
Measurement of social vocalizations
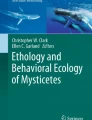
Non-song vocalizations were isolated from acoustic array recordings when they were tracked acoustically to specific groups. Vocalizations were initially subjectively classified into different types based on aural and spectrographic characteristics and then statistically classified using discriminant function analysis (Dunlop et al. 2007) and again using a classification tree (Rekdahl et al. 2013). “Grumbles” are low-frequency (fundamentally generally below 80 Hz) sounds with little or no frequency modulation lasting more than 0.5 s (Fig. 1). “Wops” are audibly distinct, short, low-frequency (fundamentally <60 Hz) upsweeps (Dunlop et al. 2007) and are the predominant call in groups containing a female and a calf (Dunlop et al. 2008; Fig. 1). These two sound types were the most commonly heard and therefore selected as the two representative sound types for the study.

Spectrograms (4096 point FFT yielding 5.4-Hz frequency resolution) of a “grumble” (a) and “wop” (b) vocal sound
Spectrograms of all selected vocalizations were produced using Spectrogram 14 (R. Horn, Visualization Software) with 4096 point fast Fourier transforms (FFT) yielding 5.4-Hz frequency resolution. A series of variables, listed in Table 1, were measured from the spectrographic samples of each vocalization. The variables measured included the vocalization duration, the frequency of the spectral peak (frequency which contained the most energy), and properties of the fundamental frequency. Measurements of the lowest frequency component of the vocalization (the fundamental in harmonic sounds) were: start and end frequencies, minimum and maximum frequencies, ratio of start to end frequency (frequency trend ratio), and ratio of the maximum to minimum frequency (frequency range ratio; see Dunlop et al. 2007 for further details). Ratios of frequencies were measured rather than the differences since ratios better match mammal perception of frequency differences (Richardson et al. 1995). All frequency measurements were initially made on a linear scale and then converted to a logarithmic scale for analysis as these match the perception of pitch in mammals (Richardson et al. 1995). The number of each sound type was counted for the duration the group was audible. Recordings were divided into 5-min time bins and the number of each call type counted within each time bin to give a total number of “wops” and “grumbles” per 5 min. The number of animals (non-singing adults, calfs, and singing adults) was also noted for each time bin.
Estimation of vocal level
The acoustic system was calibrated in situ by inserting white noise and tones of various known levels into the system at the output of the hydrophones and recording this on the hard disk. Hydrophones and the complete systems were also calibrated at the Woronora hydrophone calibration facility near Sydney. This allowed measured recorded data to be converted to received levels at the array in decibels re 1 μPa. The (noise-corrected) received sound pressure level (RL) of each humpback whale social vocalization was measured in one third octave frequency bands in the range of 40 Hz–2 kHz, within which almost all of the energy of the vocal sounds was confined. Broadband levels were calculated by summing the mean square voltages in the one third octave bands and then converting to decibels (by calculating 10 times log of the sum). The noise level (NL) in the study area (measured as a broadband level over 40 Hz–2 kHz) ranged from 89 to 105 dB re 1 μPa depending on the wind speed (5–20 kn). Passing recreational vessels temporarily (20–30 min) increased the background noise depending on how far offshore they were, though were rarely present when these recordings were made. The median noise levels for this study site was 95 dB re 1 μPa, where the wind speed was 12–15 kn and there were no audible passing vessels in the area. Source level (SL) is defined as the estimated radiated sound pressure level at a distance of 1 m from the source and expressed as decibels re 1 μPa at 1 m (Table 1). SLs were determined from the RLs by
where TL is the transmission loss as a function of distance (r) between the vocalizing group and the hydrophone in meters (calculated from each theodolite fix). The transmission loss was determined from a series of measurements of the loss using boats and a J11 underwater acoustic projector as sources (see Dunlop et al. 2013 for details of the transmission loss model). The transmission loss model also allowed the received level of vocal sounds to be predicted at any location in the study site depending on the distance from the source (vocalizing whale) to the location (e.g., singing whale). Received signal-to-noise ratios (SNRs) of the group’s vocal sounds were then calculated at the closest singer to the group by
The composition and behavior of vocalizing groups
A group of humpback whales displayed coordinated surfacing activity and maintained individual separations of no more than 100 m from each other. Humpback whale groups (subject groups) in which “grumble” and/or “wop” sounds were heard were selected for analysis. These were first categorized according to their social behavior based on the land-based observations (observers would have been “blind” to the selection of these subject groups; Table 2) as follows. Subject groups were first divided into “non-affiliating” and “affiliating.”
-
Non-affiliating—the subject group did not join with other groups or animals for at least 20 min before (as they came within sight of the visual observation team), during (10–30 min), and at least 20 min after vocal sounds were recorded (they were usually out of sight of the visual observation team after this time).
-
Affiliating—another animal or group of animals joined the subject group while vocalizations were recorded.
The social structure of non-affiliating subject groups comprised either “single-adult” (known males, adults of unknown sex, and adult females with a calf) or “multiple-adult” groups (where there were at least two adults in the group including “adult pairs” and adult females, with a calf being escorted by at least one other animal). Affiliating subject groups either involved a “singer-join” (mostly female–calf pairs being joined by a singing whale) or “non-singer-join” (mostly female–calf pairs being joined by a non-singing [probably] male escort or group of escorts; Table 2). The time of the join was noted as the time when the new animal or animals were sighted within 100 m of the original group. Vocalizations were included in the analysis up to 10 min preceding the sighted join and up to 10 min after the sighted join to incorporate sounds used during the interaction. As singers do not emit social vocalizations while singing, all measured sounds from “singer-join” groups came from the group being joined and not the singer. In “non-singer-join” groups, most of the sounds preceding the join were recorded from the group being joined (rather than the joining animal or animals). However, as these groups converged, it was not possible to separate sounds into those from the group being joined (which usually did not change course) and those from the animals joining the group (who usually changed course to approach the group).
The distances of the nearest singing whale (from the acoustic tracking) and the nearest non-singing whales or groups of whales (from land-based observations) were both measured at the time the vocal sounds were recorded from each subject group. Subject groups were then categorized according to the presence of the nearest singing animal (Table 2).
-
Joined—groups in which the singer eventually joined; there was no other singer in the area.
-
Within 2.5 km—the singer came within 2.5 km of the vocalizing group during the time vocal sounds were heard, but never joined. The closest singer was about 1 km from the group.
-
Within 5 km—the singer came within 5 km from the vocalizing group, but never closer than 2.5 km.
-
Beyond 5 km—the closest singer was beyond 5 km from the vocalizing group; usually there were no audible singers in the area.
Subject groups were also categorized according to the distance of the nearest non-singing whale or group of whales using the same distance criteria as above (within 2.5 km (the closest being about 1.5 km), 2.5–5 km, beyond 5 km; Table 2).
Statistical analysis
All analyses were conducted using the statistical software package “R” (R Development Core Team 2012). Measured vocalization parameters (of which frequency measures were logged) and vocal source levels were averaged for each analyzed group to give one independent measure per group. The average number of each call type per group per 5 min was used as a measure of vocal rate. However, as this was likely to be influenced by the number of animals in the group, the average number of each call type per non-singing adult per 5 min was used as a measure of individual vocal rate. It was assumed that calfs and singing whales did not contribute to the vocal rate of these sound types. Therefore, to obtain a measure of individual vocal rate, the number of each call type within each 5-min time bin was divided by the total number of non-singing adults in the group and then averaged over the duration of the recording.
Each group was assigned one social behavior category (single-adult, multiple-adult, singer-join, or non-singer-join), a nearest singer category (joined, within 2. 5 km, 2.5–5 km, and beyond 5 km), and a nearest neighbor category (within 2.5 km, 2.5–5 km, and beyond 5 km). First, to test for differences in vocal parameters (frequency, duration, and source level) with group social behavior, separate linear models (“normal” or “Poisson” based on the distribution of the response variable) were fit. The mean of each vocal parameter per group (response variable) was tested using social structure (single-adult, multiple-adult, singer-join, non-singer-join) as the fixed effect (after checking for normality, unequal variance, and highly influential points and assuming independence of the response variables). Secondly, to test for any “audience effect” on each vocal parameter, the nearest singer and nearest neighbor was separately included as the fixed effect, with each vocal parameter as the dependent. The results of each linear model are presented as F values with associated degrees of freedom and adjusted p values (using the “p.adjust” function in “R” which adjusts a given set of p values using a Bonferroni method). Significance was set at p < 0.05 after the correction was applied. Poisson models were compared to the null model to test for significant (p < 0.05) improvement using a likelihood ratio test. Test results are presented as χ 2 with associated degrees of freedom and adjusted p values. Effect sizes are presented as back-transformed values with 95 % confidence intervals.
Finally, to test whether frequency coding (in “grumbles”) still occurred in the presence of a singing whale, groups were then divided into those in which there was a singing whale within 5 km (16) and those in which there was no singing whale within 5 km (17). Groups being joined by a singing whale were eliminated from this analysis. These groups were also divided into those that were affiliating (groups being joined by non-singing whale(s), 14) and those that were not affiliating (19). Both the presence of a singer and group behavior were included as an interaction effect, with “grumble” maximum frequency and source level as the two dependent variables.
Results
The acoustic parameters for each sound type are summarized in Table 1. Each group produced between 2 and 12 “grumbles” (with a mean of 5 per group) and between 3 and 21 “wops” (with a mean of 6 per group).
The effect of group social behavior
As “grumbles” were low-frequency, unmodulated sounds (Fig. 1), frequency parameters such as minimum, maximum, start, end frequency, and peak of the fundamental were highly correlated with each other; therefore, only the maximum frequency and peak frequency were analyzed (minimum frequency was excluded as it sometimes corresponded to the noise level and was difficult to measure). The source level and general structure of “grumbles” (the frequency trend and range) were not found to be significantly dependent on group social behavior (Table 3). Neither were the fundamental frequency parameters, including level of “wops” (Table 3). However, groups that were joined by a singing whale (of which the majority were female–calf pairs) vocalized at significantly lower maximum and peak frequencies (Table 3 and Fig. 2a) compared to single-adult non-affiliating groups. “Grumble” maximum and peak frequencies were lower by an average of 39 Hz (95 % CI = 22–56 Hz) and 33 Hz (95 % CI = 13–54 Hz), respectively, in these “singer-join” groups. Groups being joined by a non-singing whale or group of whales also emitted “grumbles” at lower frequencies (by 30 Hz, 95 % CI = 14–46 Hz), as did groups containing multiple adults (by 22 Hz, 95 % CI = 6–39 Hz; Fig. 2a). Groups joined by non-singing whale(s) and multiple-adult groups also emitted significantly shorter “grumbles” (Table 3 and Fig. 2b) compared to single-adult groups. “Grumbles” produced by groups joined by a non-singing whale(s) were shorter by 2 s (95 % CI = 1–4 s); a similar difference was found in multiple-adult groups (of 2 s, 95 % CI = 0.5–3 s).

Box plots (displaying the median, lower and upper quartiles, minimum and maximum values, and outliers outside 1.5 times the interquartile range above the upper quartile and below the lower quartile) of the maximum frequency (unlogged) (a) and duration (b) of “grumbles” recorded from all single-adult non-interacting groups, multiple-adult non-interacting groups, groups involved in a join with a non-singing animal, and groups involved in a join with a singer (with significance set at *p < 0.05, **p < 0.01, and ***p < 0.001 compared to single-adult non-interacting groups)
Group “wop” rate (per 5 min) and individual “wop” rate (per 5 min) did not significantly change with group social behavior (Table 3). Group “grumble” rate, however, was significantly (Table 3) greater in multiple-adult groups and groups being joined by a non-singing whale. As individual “grumble” rate was not found to be significantly different (Table 3), the increase in group “grumble” rate was likely due to the increase in the number of vocalizing animals rather than an increase in individual “grumble” rate.
The effect of nearest singer and nearest non-singing group
The distance of the nearest singing whale and the distance of the nearest group had no significant effect on “grumble” (or “wop” frequency and duration parameters as well as group and individual vocal rates; Table 3). However, both “grumble” and “wop” source levels were significantly lower (by 14 dB, 95 % CI = 5–22 dB) in groups which had a singing whale within 2.5 km compared to when there was no singer within 5 km (Table 3 and Fig. 3a, b). Groups also emitted “grumbles” at lower levels (by 9 dB, 95 % CI = 2–17 dB) when there was a singing whale between 2.5 and 5 km compared to when there was no singer within 5 km (Fig. 3a). The distance of the nearest non-singing group, however, had no significant effect on “grumble” or “wop” source levels (Table 3).

Box plots (displaying the median, lower and upper quartiles, minimum and maximum values, and outliers outside 1.5 times the interquartile range above the upper quartile and below the lower quartile) of the source level of “grumbles” (a) and “wops” (b) recorded from groups in which the closest singer was within 2.5 km, between 2.5 and 5 km, and beyond 5 km and had joined the group (with significance set at *p < 0.05, **p < 0.01, and ***p < 0.001 compared to groups in which the closest singer was beyond 5 km)
Groups in which there was a singing whale beyond 5 km vocalized at about 163 dB re 1 μPa at 1 m compared to only 149 dB re 1 μPa at 1 m in groups where there was a singing whale close by. Using the transmission loss model, the received SNRs at various distances from the source were predicted assuming a group SL of 163 dB re 1 μPa at 1 m, and again assuming a group SL of 149 dB re 1 μPa at 1 m, with a median noise level of 95 dB re 1 μPa. At a distance of 2.5 km, the received SNR of “grumbles” was −10 dB in median noise (with a SL of 149 dB re 1 μPa at 1 m) compared to 5 dB with a SL of 163 dB re 1 μPa at 1 m. This reduction in SL is therefore likely to reduce the ability of a singing whale to audibly detect a vocalizing group at this distance (Fig. 4). The SLs of “wops” was 164 dB re 1 μPa at 1 m when the nearest singer was beyond 5 km, decreasing to 150 dB re 1 μPa at 1 m with a close-by singer. Therefore, received SNRs of “wops” would also have been close to −10 dB at this distance in the presence of a close-by singer.

Modeled received SNR of “grumbles” at various distances from the source (vocalizing whale) assuming a SL of 163 dB re 1 μPa at 1 m (solid line) and a SL of 149 dB re 1 μPa at 1 m (broken line), with a median noise level of 95 dB re 1 μPa
The effect of singer presence on “grumble” parameters in affiliating groups
Affiliating groups, whether or not a singer was present, vocalized at significantly (F 3,27 = 4.24, p = 0.014) lower maximum frequencies (by 25 Hz, 95 % CI = 2–47 Hz) compared to non-affiliating groups, suggesting that affiliating groups still emitted “grumbles” at a lower frequency even in the presence of a singing whale (Fig. 5a). Although “grumble” source levels were significantly lower (F 3,27 = 3.58, p = 0.026) in groups when a singer was within 5 km (Fig. 5b), source levels were not significantly different between affiliating and non-affiliating groups, even in the presence of a singing whale (p = 0.600).

Box plots (displaying the median, lower and upper quartiles, and minimum and maximum values, and outliers outside 1.5 times the interquartile range above the upper quartile and below the lower quartile) of the maximum frequency (unlogged) (a) and source level (b) of “grumbles” recorded in affiliating and non-affiliating groups where the closest singer was within and beyond 5 km
Discussion
The results show that context-specific differences in vocal parameters may exist in humpback whales and that these differences were related to the sound type, the group social behavior (whether or not they were involved in an affiliation), and the presence of a nearby singing whale. The frequency and duration parameters of “wops” were static in that they did not vary depending on group social behavior. In addition, the general structure of “grumbles” (denoted by the frequency range and frequency trend) was also found to be static. However, the frequency and duration of “grumbles” were found to be flexible and related to the social context of the vocalizing group, implying that these particular vocal sounds fit the frequency code hypothesis (as defined by Ohala 1984). Groups that were involved in an affiliation emitted “grumbles” at lower frequencies and, when comprising more than one adult, emitted “grumbles” of shorter duration. Although this difference in frequency was still evident in the presence of a nearby singing whale (an audible bystander), both sound types were emitted at much (14 dB) lower amplitudes (but at similar rates). This change in vocal amplitude likely resulted in the singing whale being unable, or less likely, to detect the group (since the received SNR of the group’s vocalizations would have been −10 dB at the singer) and could be a mechanism to reduce social eavesdropping by the singer. Nearby groups of whales that were not singing had no effect on group vocal level. Therefore, in humpback whale social communication, the presence of an audible bystander (Marler et al. 1986), rather than a non-singing group, has a significant effect on group vocal behavior in terms of the level at which the signal is produced.
This reduction in vocal amplitude suggests that these groups are acoustically “avoiding” a known (audible) male in the area, an example of vocal crypsis. Vocal rate did not change in the presence of a singer, implying that signals were still being emitted at the same rate, but at lower levels. Therefore, in this “triadic setting” (Zuberbühler 2008), it seems that the bystander (the singing whale) was an untargeted receiver (a bystander). In this study, all recorded groups in which there was a singer close by were comprised a lactating female that would have just given birth to a calf, plus one or more adults. The social structure of these groups would have been either a single male “escorting” the female or groups of males joining and competing for the position of primary escort to the one female (Tyack and Whitehead 1983; Baker and Herman 1984; Brown and Corkeron 1995; Clapham et al. 1992; Clapham 1996, 2000). Since female–calf groups are known to commonly use “wops” and (less commonly) “grumbles” (Dunlop et al. 2008), and both sound types have been recorded from acoustically tagged females (unpublished data from this study site), it is likely, in this study, that the female within the group produced at least some of the measured sounds. One reason for the observed vocal crypsis could be that females are avoiding unwanted attention from singing males, which could be for a number of reasons. Although postpartum estrous in female humpbacks is possible, it is not common (Chittleborough 1958), so these lactating females may not be in estrous and therefore would be unreceptive to males. In addition, recent studies have hypothesized that females with a calf incur energetic costs when being escorted by multiple males (Cartwright and Sullivan 2009; Craig et al. 2014). Further, during aggressive interactions (such as those that occur when females are escorted by a number of males), calves may be injured or separated from their mothers (Baker and Herman 1984; Smultea 1994), indicating another potential cost of joining males. On Hawaiian breeding grounds, female–calf pairs are more likely (compared to females without calves) to be “chased” or “harassed” by males and have been found to avoid playback of sounds from competitive groups (Jones 2010). There is therefore a growing body of evidence that lactating female humpback whales are attempting to avoid male harassment. Lowering the amplitude, but not the rate, of their vocal sounds in the presence of a known male may be one way to do so. There is little research on the call flexibility of females in the presence of bystander males (Townsend and Zuberbühler 2009), though female chimpanzees are known to strategically change their calls according to the social ranking of the female audience (Townsend et al. 2008). Further, in many communication network studies, the audience is also a targeted receiver (e.g., Slocombe and Zuberbühler 2007; Fedurek et al. 2013). The social setting highlighted in this study would provide opportunities to specifically test the effects of an unintended male audience on female vocal activity, such as calls between her and her calf (the intended receiver).
Within the vocalizing group, however, males may also have been producing these sounds (as the acoustic tracking in this study was not accurate enough to localize sounds to a specific group member). The calling rate of “grumbles” was greater in larger groups (which contained one female but greater numbers of non-singing adult males), implying that adult males also emitted these sound types. In terrestrial systems, providing cues to other males in the area can be costly as it encourages competition and can result in reduced mating success (Balsby and Dabelsteen 2005; Stoltz and Andrade 2010). In other words, males within the group may also be acoustically avoiding a known male in the area. Male–female signaling behavior has been found to change in the presence of an audience in various species of fish (e.g., Doutrelant et al. 2001; Makowicz et al. 2010; Dzieweczynsk et al. 2011; Auld et al. 2015), birds (e.g., Vignal et al. 2004), and primates (e.g., Overduin-De Vries et al. 2012; Roberts and Roberts 2015). Hence, in humpback whales, the reduction in vocal amplitude (be it from the female or males in the group) may be to discourage more males (singing whales) from joining, resulting in fewer aggressive interactions between competing males and less within-group competition between males. Interestingly, there was no such effect with the presence of a nearby non-singing whale or group of whales (which may not have been detectable to the group if not vocalizing). The reduction in vocal amplitude found in this study seems to only occur in the presence of bystanders that are audible to the group, i.e., singing bystanders. Whether or not the nearest non-singing groups were audible to the study groups (i.e., producing audible social sounds) was an unknown factor in the study. Further studies should therefore determine whether there is in fact a “cost” to group members of additional males joining and if this “cost” is reduced by acoustically avoiding known (singing) males in the area.
The dataset in this study also included vocalizing female–calf pairs that had already been joined by a singing male, suggesting that not all females were avoiding singing whales or that their avoidance strategy was not always successful. In these groups, the analyzed sounds would have come from the female or calf (singers do not emit social sounds while singing). Given that calves tend to make short-duration (<0.5 s) sounds that are either pulsed, amplitude-modulated, or, if frequency-modulated, tend to be above 500 Hz (Zoidis et al. 2008), it is likely that most of the sounds were from the female in the group. Interestingly, these escorted female–calf groups vocalized at similar levels to groups in which there was no singing whale in the area, illustrating that the observed lowering in vocal amplitude was in response to a close-by singer (that did not become part of the group) rather than to a singer which was already part of the group. Associations between males and females at this study site are common, probably due to males prospecting for mating opportunities (Mobley and Herman 1985; Clapham 1996), implying that at least some of the females would be receptive some of the time. Currently, it is not possible in humpback whales to determine if the physiological state of the female (i.e. whether or not she is in estrous) plays a role in the different vocal behaviors observed, but relating physiological state to vocal behavior may help to further understand the observed variation in vocal amplitude with social context.
In addition, this study has provided evidence that one of the most common vocal signals of humpback whales, “grumbles,” has a static–dynamic component and therefore is likely to contain flexible information such as motivation. “Wops” were not found to be structurally flexible, at least during group affiliations, indicating that these sounds may have evolved to encode specific static information related to their function. In terrestrial systems, low-frequency unmodulated sounds often code for signaler size (Fitch 1997; Vannoni and McElligott 2008; Taylor and Reby 2010) and harsh low-frequency sounds signify aggression (Morton 1977; Reichert and Gerhardt 2013; Ordoniez-Gomez et al. 2015). Low-frequency “rumbles” in elephants are used for contact calling, herd assembly, social interactions, and aggressive interactions (Nair et al. 2009), as well as advertising individual identity, reproductive state, emotional state (Soltis 2010), and social role within a group (Soltis et al. 2009). In humpback whales, “grumbles” are more commonly heard in the multiple-adult groups described above, many of which contain competitive males (Dunlop et al. 2008). “Wops,” on the other hand, are more common in female–calf pairs and female–calf pairs being escorted by a male (Dunlop et al. 2008) compared to other group compositions. In keeping with terrestrial communication systems, perhaps the lower-frequency “grumbles” signify levels of aggression or indicate differing social roles within the group, whereas “wops” reflect a static signaler trait such as sex and/or location. In the Hawaiian breeding grounds, female–calf pairs can be subjected to aggressive advances from males (defined as “herding,” “chasing,” and “blocking”; Jones 2010), suggesting that inter-sex conflicts, as well as intra-sex conflicts (between competitive males), are a common occurrence in humpback whale breeding behavior. At this stage, the function, or functions, of “grumbles” and “wops” in humpback whales remains speculative, as does the reason for the differences (or lack of differences) in frequency during social affiliations. What is clear from this study is that, in certain social situations in humpback whales, it may not just be the type of sound being used that provides the important information, but also the frequency and/or amplitude at which it is produced.
The results of this study highlight the complex communication networks in marine mammals (Janik 2005). Specifically, this study has shown that within the communication system of humpback whales, socially driven dynamic vocal frequency coding exists. This coding system is similar in some ways to a typical terrestrial system in that some features, such as frequency, change with social context, while other structural features do not. Few studies have determined the effects of an untargeted bystander on signaler behavior (Zuberbühler 2008). In humpback whales, it seems that changes in frequency between affiliating and non-affiliating groups still occurred in the presence of an audible bystander; in other words, the coding system remained. However, although the presence of this bystander had no effect on the rate of production of these vocal sounds, sounds were emitted at substantially lower acoustic levels. This reduced signal level implies that humpback whales are suppressing their vocalizations to acoustically “avoid” nearby males. The function of these sounds, as well as the reasons behind the observed differences in vocal parameter, remains, at this stage, speculative and the hypotheses laid out in this discussion are by no means exhaustive. However, the results provide a basis to carry out more targeted research on the function of these sounds in humpback whales and the potential costs to the signaler of eavesdropping by other conspecifics.
References
Au WL, Pack AA, Lammers MO, Herman LM, Deakos MH, Andrews K (2006) Acoustic properties of humpback whale songs. J Acoust Soc Am 120:1103–1110
Auld HL, Jeswiet SB, Godin J-GJ (2015) Do male Trinidadian guppies adjust their alternative mating tactics in the presence of a rival male audience? Behav Ecol Sociobiol 69:1191–1199
Baker CS (1994) Sex identification of humpback whales, Megaptera noveangliae, on the wintering grounds in the Mexican Pacific Ocean. Can J Zool 72:1171–1174
Baker CS, Herman LM (1984) Aggressive behavior between humpback whales (Megaptera novaeangliae) wintering in Hawaiian waters. Can J Zool 62:1922–1937
Balsby TJS, Dabelsteen T (2005) Simulated courtship interactions elicit neighbour intrusions in the whitethroat, Sylvia communis. Anim Behav 69:161–168
Bradbury JW, Vehrencamp SL (1998) Principles of animal communication. Sinauer Associates, Sunderland
Briefer EF, Maigrot A-L, Mandel R, Briefer Freymond S, Bachmann I, Hillmann E (2015) Segregation of information about emotional arousal and valence in horse whinnies. Sci Rep 4:9989
Brown MR, Corkeron PJ (1995) Pod characteristics of migrating humpback whales (Megaptera novaeangliae) off the east Australian coast. Behaviour 132:163–179
Cartwright R, Sullivan M (2009) Associations with multiple male groups increase the energy expenditure of humpback whale (Megaptera novaeangliae) female and calf pairs on the breeding grounds. Behaviour 146:1573–1600
Cato DH (1991) Songs of humpback whales: the Australian perspective. Mem Queensl Mus 30:277–290
Charlton BD, Reby D (2011) Context-related acoustic variation in male fallow deer (Dama dama) groans. PLoS One 6:e21066
Chittleborough RG (1958) The breeding cycle of the female humpback whale, Megaptera nodosa (Bonnaterre). Aust J Mar Fresh Res 9:1–18
Clapham PJ (1996) The social and reproductive biology of humpback whales: an ecological perspective. Mammal Rev 26:27–49
Clapham PJ (2000) The humpback whale. In: Mann J, O’Connor R, Tyack PL, Whitehead H (eds) Cetacean societies. Field studies of dolphins and whales. The University of Chicago Press, London, pp 173–196
Clapham PJ, Palsboll PJ, Mattila DK, Vasquez O (1992) Composition and dynamics of humpback whale competitive groups in the West-Indies. Behaviour 122:182–194
Cheney DL, Seyfarth RM, Silk JB (1995) The role of grunts in reconciling opponents and facilitating interactions among adult female baboons. Anim Behav 50:249–257
Clutton-Brock TH, Albon SD (1979) The roaring of red deer and the evolution of honest advertisement. Behaviour 69:145–170
Craig AS, Herman LM, Pack AA, Waterman JO (2014) Habitat segregation by female humpback whales in Hawaiian waters: avoidance of males? Behaviour 151:613–631
Dabelsteen T (2005) Public, private or anonymous? Facilitating and countering eavesdropping. In: McGregor PK (ed) Animal communication networks. Cambridge University Press, Cambridge, pp 38–62
Darling JD, Bérubé M (2001) Interactions of singing humpback whales and other males. Mar Mammal Sci 17:570–584
Darling JD, Gibson KM, Silber GK (1983) Observations on the abundance and behavior of humpback whales (Megaptera novaeangliae) off West Maui, Hawaii, 1977–79. In: Payne R (ed) Communication and behavior of whales. AAAS Selected Symposia Series. Westview Press, Boulder, pp 201–222
Doutrelant C, McGregor PK, Oliveira RF (2001) The effect of an audience on intrasexual communication in male Siamese fighting fish, Betta splendens. Behavioral Ecology 12:283–286
Dunlop RA, Cato DH, Noad MJ (2008) Non-song acoustic communication in migrating humpback whales (Megaptera novaeangliae). Mar Mammal Sci 24:613–629
Dunlop RA, Noad MJ, Cato DH (2007) The social vocalization repertoire of east Australian migrating humpback whales (Megaptera novaeangliae). J Acoust Soc Am 122:2893–2905
Dunlop RA, Noad MJ, Cato DH (2013) Source levels of social sounds in migrating humpback whales (Megaptera novaeangliae). J Acoust Soc Am 134:706–714
Dzieweczynski TL, Earley RL, Green TM, Rowland WJ (2005) Audience effect is context dependent in Siamese fighting fish, Betta splendens. Behav Ecol 16:1025–1030
Dzieweczynski TL, Walsh MM (2011) Audience type and receptivity affect male-female interactions in Siamese fighting fish. Ethology 117:10–18
Fedurek P, Machanda ZP, Schel AM, Slocombe KE (2013) Pant hoot chorusing and social bonds in male chimpanzees. Anim Behav 86:189–196
Fichtel C, Manser M (2010) Vocal communication in social groups. In: Kappeler PM (ed) Animal behaviour: evolution and mechanisms. Springer, Heidelberg, pp 29–54
Fischer J, Hammerschmidt K, Cheney DL, Seyfarth RM (2002) Acoustic features of male baboon loud calls: influences of context, age, and individuality. J Acoust Soc Am 111:1465–1474
Fischer J, Kitchen D, Seyfarth RM, Cheney DL (2004) Baboon loud calls advertise male quality: acoustic features and relation to rank, age, and exhaustion. Behav Ecol Sociobiol 56:140–148
Fitch WT (1997) Vocal tract length and formant frequency dispersion correlate with body size in rhesus macaques. J Acoust Soc Am 102:1213–1222
Fitzsimmons LP, Foote JR, Ratcliffe LM, Mennil DJ (2008) Eavesdropping and communication networks revealed through playback and an acoustic location system. Behav Ecol 19:824–829
Glockner DA (1983) Determining the sex of humpback whales (Megaptera novaeangliae) in their natural environment. In: Payne R (ed) Communication and behaviour of whales. AAAS Selected Symposia Series. Westview Press, Boulder, pp 447–464
Harris TR, Fitch WT, Goldstein LM, Fashing PJ (2006) Black and white Colobus monkey (Colobus guereza) roars as a source of both honest and exaggerated information about body mass. Ethology 112:911–920
Herman LM, Antinoja RC (1977) Humpback whales in the Hawaiian breeding waters: population and pod characteristics. Sci Rep Whales Res Inst 29:59–85
Holland J, Dabelsteen T, Pedersen SB, Larsen ON (1998) Degradation of wren Troglodytes troglodytes song: implications for information transfer and ranging. J Acoust Soc Am 103:2154–2166
Janik VM (2005) Underwater acoustic communication networks in marine mammals. In: McGregor PK (ed) Animal communication networks. Cambridge University Press, New York, pp 390–415
Jones M (2010) Female humpback whale (Megaptera novaeangliae) reproductive class and male-female interactions during the breeding season. PhD dissertation, Anitoch University New England, Keene, NH
Lemasson A, Boutin A, Boivin S, Blois-Heulin C, Hausberger M (2009) Horse (Equus caballus) whinnies: a source of social information. Anim Cogn 12:693–704
Linhart P, Ratcliffe VF, Reby D, Špinka M (2015) Expression of emotional arousal in two different piglet call types. PLoS One 10:e0135414
Makowicz AM, Plath M, Schlupp I (2010) Using video playback to study the effect of an audience on male mating behavior in the sailfin molly (Poecilia latipinna). Behav Process 85:36–41
Marler P, Dufty A, Pickert R (1986) Vocal communication in the domestic chicken. II. Is a sender sensitive to the presence and nature of a receiver? Anim Behav 34:194–198
McComb K, Reby D, Baker L, Moss C, Sayialel S (2003) Long-distance communication of acoustic cues to social identity in African elephants. Anim Behav 65:317–329
McGregor PK, Dabelsteen T (1996) Communication networks. In: Kroodsma DE, Miller EH (eds) Ecology and evolution of acoustic communication in birds. Cornell University Press, Ithaca, pp 409–425
McGregor PK, Otter K, Peake TM (1999) Communication networks: receiver and signaller perspectives. In: Espmark Y, Amundsen T, Rosenqvist G (eds) Animal signals: signalling and signal design in animal communication. Tapir Academic, Trondheim, pp 405–416
McGregor PK, Peake TM (2000) Communication networks: social environments for receiving and signaling behaviour. Acta Ethol 2:71–81
Mobley JR, Herman LM (1985) Transience of social affiliations among humpback whales (Megaptera novaeangliae) in the Hawaiian wintering grounds. Can J Zool 63:762–772
Morton ES (1977) On the occurrence and significance of motivation-structural rules in some bird and mammal sounds. Am Nat 111:855–869
Nair S, Balakrishnan R, Seelamantuala CS, Sukumar R (2009) Vocalizations of wild Asian elephants (Elephas maximum): structural classification and social context. J Acoust Soc Am 126:2768–2778
Noad MJ (2002) The use of song in humpback whales (Megaptera novaeangliae) during migration off the east coast of Australia. PhD thesis, University of Sydney, Faculty of Veterinary Science, Sydney, Australia
Noad MJ, Cato DH, Stokes MD (2004) Acoustic tracking of humpback whales: measuring interactions with the acoustic environment. Proceedings of Acoustics 2004, Meeting of the Australian Acoustical Society, Gold Coast, pp 353–358
Notman H, Rendall D (2005) Contextual variation in chimpanzee pant hoots and its implications for referential communication. Anim Behav 70:177–190
Ohala J (1984) An ethological perspective on common cross-language utilization of F0 of voice. Phonetica 41:1–16
Ordonez-Gomez JD, Dunn JC, Arroyo-Rodriguez V, Mendez-Cardenas MG, Marquez-Arias A, Santillan-Doherty AM (2015) Role of emitter and severity of aggression influence the agonistic vocalizations of Geoffroy’s spider monkeys (Ateles geoffroyi). Int J Primatol 36:429–440
Overduin-De Vries AM, Massen JJM, Spruijt BM, Sterck EHM (2012) Sneaky monkeys: an audience effect of male rhesus macaques (Macaca mulatta) on sexual behavior. Am J Primatol 74:217–228
Palombit RA (1992) A preliminary study of vocal communication in wild long-tailed macaques (Macaca fascicularis). II. Potential of calls to regulate intra-group spacing. Int J Primatol 13:183–207
Payne K, Tyack P, Payne R (1983) Progressive changes in the songs of humpback whales (Megaptera novaeangliae): a detailed analysis of two seasons in Hawaii. In: Payne R (ed) Communication and behavior of whales. AAAS Selected Symposia Series. Westview Press, Boulder, pp 9–57
Payne RS, McVay S (1971) Songs of humpback whales. Science 173:585–597
Peake TM (2005) Eavesdropping in communication networks. In: McGregor PK (ed) Animal communication networks. Cambridge University Press, Cambridge, pp 13–37
Poole J, Payne K, Langbauer W, Moss C (1988) The social contexts of some very low frequency calls of African elephants. Behav Ecol Sociobiol 22:385–392
R Development Core Team (2012) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, http://www.R-project.org/
Reby D, McComb K (2003) Anatomical constraints generate honesty: acoustic cues to age and weight in the roars of red deer stags. Anim Behav 65:519–530
Reby D, Cargnelutti B, Joachim J, Aulagnier S (1999) Spectral acoustic structure of barking in roe deer (Capreohs capeohs). Sex-, age- and individual-related variations. CR Acad Sci III – Vie 322:271–279
Reichert MS, Gerhardt HC (2013) Gray tree frogs, Hyla versicolor, give lower frequency aggressive calls in more escalated contests. Behav Ecol Sociobiol 67:795–804
Riesch R, Ford JKB, Thomsen F (2008) Whistle sequences in wild killer whales (Orcinus orca). J Acoust Soc Am 124:1822–1829
Rekdahl ML, Dunlop RA, Goldizen AW, Garland EC, Biassoni N, Miller P, Noad MJ (2015) Non-song social call bouts of migrating humpback whales. J Acoust Soc Am 137:3042–3053
Rekdahl ML, Dunlop RA, Noad MJ, Goldizen AW (2013) Temporal stability and change in the social call repertoire of migrating humpback whales. J Acoust Soc Am 133:1785–1795
Richardson WJ, Greene CR Jr, Malme CI, Thomson DH (1995) Marine mammals and noise. Academic, San Diego
Riede T, Fitch T (1999) Vocal tract length and acoustics of vocalisation in the domestic dog (Canis familiaris). J Exp Biol 202:2859–2867
Roberts AI, Roberts SGB (2015) Gestural communication and mating tactics in wild chimpanzees. PLoS One 10:e0139683
Silber GK (1986) The relationship of social vocalizations to surface behaviour and aggression in the Hawaiian humpback whale (Megaptera novaeangliae). Can J Zool 64:2075–2080
Slocombe KE, Zuberbuhler K (2007) Chimpanzees modify recruitment screams as a function of audience composition. Proc Natl Acad Sci U S A 104:17228–17233
Smith JN, Goldizen AW, Dunlop RA, Noad MJ (2008) Songs of male humpback whales (Megaptera novaeangliae) are involved in intersexual interactions. Anim Behav 76:467–477
Smultea MA (1994) Segregation by humpback whale (Megaptera novaeangliae) cows with calves in coastal habitat near the island of Hawaii. Can J Zool 72:805–811
Soltis J (2010) Vocal communication in African elephants (Loxodonta africana). Zoo Biol 29:192–209
Soltis J, Blowers TE, Savage A (2011) Measuring positive and negative affects in the voiced sounds of African elephants (Loxodonta africana). J Acoust Soc Am 129:1059–1066
Soltis J, Leighty KA, Wesolek CM, Savage A (2009) The expression of affect in African elephant (Loxodonta africana) rumble vocalizations. J Comp Psychol 123:222–225
Stoltz JA, Andrade MCB (2010) Female’s courtship threshold allows intruding males to mate with reduced effort. Proc R Soc Lond B 277:585–592
Sugiura H (2007) Effects of proximity and behavioral context on acoustic variation in the coo calls of Japanese macaques. Am J Primatol 69:1412–1424
Taylor AM, Reby D (2010) The contribution of source–filter theory to mammal vocal communication research. J Zool 280:221–236
Taylor AM, Reby D, McComb K (2011) Cross modal perception of body size in domestic dogs (Canis familiaris). PLoS One 6:e17069
Theis KR, Greene KM, Benson-Amram SR, Holekamp KF (2007) Sources of variation in the long-distance vocalizations of spotted hyenas. Behaviour 144:557–584
Townsend SW, Deschner T, Zuberbühler K (2008) Female chimpanzees use copulation calls flexibly to prevent social competition. PLoS One 3:e2431
Townsend S, Zuberbuhler K (2009) Audience effects in chimpanzee copulation calls. Commun Integr Biol 2:282–284
Tyack PL (1983) Differential response of humpback whales, Megaptera novaeangliae, to playback of song or social sounds. Behav Ecol Sociobiol 13:49–55
Tyack PL, Whitehead H (1983) Male competition in large groups of humpback whales. Behaviour 83:132–154
Vannoni E, McElligott AG (2008) Low frequency groans indicate larger and more dominant fallow deer (Dama dama) males. PLoS One 3:e3113
Vignal C, Mathevon N, Mottin S (2004) Audience drives male songbird response to partner’s voice. Nature 430:448–451
Zoidis AM, Smultea MA, Frankel AS, Hopkins JL, Day A, McFarland AS, Whitt AD, Fertl D (2008) Vocalizations produced by humpback whale (Megaptera novaeangliae) calves recorded in Hawaii. J Acoust Soc Am 123:1737–1746
Zuberbühler K (2008) Audience effects. Curr Biol 18:R189–R190
Acknowledgments
The author would like to thank everyone involved in the Humpback Acoustic Research Collaboration (HARC) and BRAHSS (the Behavioural Response of Australian Humpback whales to Seismic Surveys), in particular the numerous volunteers who donated their time and energy to this project. I also thank David Paton for his invaluable field expertise and Eric Kniest for his continued support in the development of Cyclopes and later VADAR. The author would particularly like to acknowledge Associate Professor Michael Noad for leading the HARC work (without which, this study would not have been possible), Dr. Douglas Cato for developing the transmission loss model, and Dr. Melinda Rekdahl for providing some of the measurements. Finally, the author would like to acknowledge the reviewers for taking the time to provide valuable comments.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethical approval
All work was carried out under permits from the Australian government Department of Environment and Water Resources and the Queensland Environmental Protection Agency and with animal ethics approval from the University of Queensland.
Conflicts of interest
There were no actual or perceived conflicts of interest.
Informed consent
Informed consent was not required.
Funding
This work was funded by The US Office of Naval Research (2002–2004), the Australian Defence Science and Technology Organisation (2002–2008), the Australian Marine Mammal Centre (2008), and (together) the Joint Industry Programme on E&P Sound and Marine Life and the United States Bureau of Ocean Energy Management (BOEM, 2010 and 2011).
Additional information
Communicated by L. Rendell
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Dunlop, R.A. Changes in vocal parameters with social context in humpback whales: considering the effect of bystanders. Behav Ecol Sociobiol 70, 857–870 (2016). https://doi.org/10.1007/s00265-016-2108-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00265-016-2108-0