
Abstract
This study deals with the evolution of (scalar) attributes (resources or income in evolutionary demography or economics, position in traffic management, etc.) of a population of “mobiles” (economic agents, vehicles, etc.). The set of mobiles sharing the same attributes is regarded as an instantaneous cohort described by the number of its elements. The union of instantaneous cohorts during a mobile window between two attributes is a cohort. Given a measure defining the number of instantaneous cohorts, the accumulation of the mobile attributes on a evolving mobile window is the measure of the cohort on this temporal mobile window. Imposing accumulation constraints and departure conditions, this study is devoted to the regulation of the evolutions of the attributes which are
-
1.
viable in the sense that the accumulations constraints are satisfied at each instant;
-
2.
and, among them, optimal, in the sense that both the duration of the temporal mobile window is maximum and that the accumulation on this temporal mobile window is the largest viable one. This value is the “accumulation valuation” function.
Viable and optimal evolutions under accumulation constraints are regulated by an “implicit Volterra integro-differential inclusion” built from the accumulation valuation function, solution to an Hamilton–Jacobi–Bellman partial differential equation under constraints which is constructed for this purpose.
Similar content being viewed by others

Notes
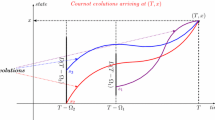
Here, \(T\) denotes a “present time” assumed to be frozen and not an “horizon”. Instead of the “prospective approach” predicting the evolution on a fixed future temporal window \([0, H]\) of horizon \(H\), we suggest to follow a “restrospective approach” studying the evolutions on past temporal windows \([T-\Omega , T]\) with variable duration \(\Omega \ge 0\). Durations have an origin \(0\), the choice of an origin of time is not consensual. In sciences of life motivating this study, we may be able to study the history on variable temporal window instead of forecasting future evolutions on temporal window \([0, H]\) with fixed horizon \(H\), finite or infinite (see [17, Aubin et al.] and La valeur n’existe pas. à moins que..., [11, Aubin].). Even in traffic studies, the mobiles are driven under uncertainty by human beings on variable temporal windows, whereas robots are constructed by the same human beings for behaving deterministically on predetermined temporal windows.
In Caesar’s Gallic War, a cohort was a unit of soldiers made of six centuries (of 100 men), with 10 cohorts to a legion. The number six of centuries was a curious relic of the duodecimal system in the decimal system favored by the Romans.
An abstract common concept such as attribute we suggest should indeed be useful for avoiding confusion by choosing a word such as “event” which may induce in other fields a meaning which is not adequate. This allows us to place under the same abstract umbrella those many examples of events, criteria, positions, income, characteristics of agents, monades, etc., in many examples motivated by various fields. We did not suggest to borrow the word “characteristics” which is used to define “characteristic” systems in conservation laws, Hamilton–Jacobi partial differential equations, viability theory (see for instance [4, 11], Aubin] (in French, but without mathematics), [9, Aubin], [13, Aubin et al.] and [16, Aubin et al.]) and in this study.
See Le Capital au XXI \(^{e}\) siècle, [39, Piketty], by Thomas Piketty.
See for instance p. 142, chapter 6, of the book Le chômage, fatalité ou nécessité ?, [23, Cahuc and Zylberberg], of Pierre Cahuc and André Zylberberg.
In mechanics, if the function \(n(\alpha ) := W'(\alpha )\) is derived from a potential function \(\alpha \mapsto W(\alpha )\), the number \(n(x)\) has the dimension of a force (here, a density), so that its product \(a'(t)=W'(x(t))x'(t)\) by the velocity (here, the celerity) has the dimension of power, and \(t \mapsto a'(t)\) is a flux or a flow. In this case, the accumulation \(a(t)=W(x(t))-W(x(T-\Omega ))\) is the potential difference. There is no need to posit the existence of a potential function on the attribute, this case being derived from the general case studied here.
See Chapter 7, p. 375, (and specifically, p. 423) of [39, Piketty]. We do not investigate the nature of this regulator, from central banks to the “Market” deity of our time. See La mort du devin, l’émergence du démiurge., [4, Aubin], Time and Money, [9, Aubin], and La valeur n’existe pas. à moins que..., [11, Aubin].
In traffic management, the lower celerities \(\mathbf {c}^{\flat }(t, x, a) =0\) since the mobiles either are at rest or moving forward. This is not the necessarily the case for examples derived from demography, ecology and economics.
See for instance in Viability Theory. New Directions, [13, Aubin et al.].
See [40, Quincampoix] proving the barrier property when the right-hand side of the differential inclusion is both Marchaud and Lipschitz.
See [36, Lebacque et al.] for the analogy with supply and demand fundamental diagrams.
See Appendix 1, p. 17, [17, Aubin et al.], Set-valued analysis, [18, Aubin and Frankowska], Variational Analysis, [41, Rockafellar and Wets], etc. Actually, the Frankowska’s proof of the Viability Theorem allows us to replace the tangent cone \(T_{\mathcal {V}}(t, x, a)\) by its closed convex hull \(T^{\star \star }_{\mathcal {V}}(t, x, a)\) in all the results of this section. We do not use this important property for simplifying the exposition (see Theorem 11.2.7, p. 447, of [13, Aubin et al.]).
See Definition 7.3.1, p. 275, of Set-valued analysis, [18, Aubin and Frankowska]: the hypograph of the upper hypolimit is the Painlevé-Kuratowski limit of the epigraph, equal to
$$\begin{aligned} \lim _{\downarrow }^{\sharp }\mathbf {V}_{\mathbf {k}_{j}}(t, x) = \limsup _{(t_{j}, x_{j}) \mapsto (t, x)}\mathbf {V}_{\mathbf {k}_{j}}(t_{j}, x_{j}) \end{aligned}$$(86)See Theorem 10.7.6, p. 419, of Viability Theory. New Directions, [13, Aubin et al.].
Since the initial accumulation vanishes by definition, the evolutions cannot have a constant accumulation. They can only been bounded above, and, in particular, by a constant accumulation.
See for instance [2, Aubin].
See Theorem 2.9, p.26.
References
Aubin, J.-P.: Mutational and Morphological Analysis: Tools for Shape Regulation and Morphogenesis. Birkhäuser, Boston (2000)
Aubin, J.-P.: Boundary-value problems for systems of Hamilton–Jacobi–Bellman inclusions with constraints. SIAM J. Control 41, 425–456 (2002)
Aubin, J.-P.: Macroscopic traffic models: shifting from densities to “celerities”. Appl. Math. Comput. 217, 963–971 (2010). http://dx.doi.org/10.1016/j.amc.2010.02.032
Aubin, J.-P.: La mort du devin, l’émergence du démiurge. Essai sur la contingence, la viabilité et l’inertie des systémes. Éditions Beauchesne (2010)
Aubin, J.-P.: Regulation of births for viability of populations governed by age-structured problems. J. Evol. Equ. (2011). doi:10.1007/s00028-011-0125-z
Aubin, J.-P.: Viability solutions to structured Hamilton–Jacobi equations under constraints. SIAM J. Control Optim. 49, 1881–1915 (2011). http://dx.doi.org/10.1137/10079567X
Aubin, J.-P.: Lax-Hopf formula and max-plus properties of solutions to Hamilton–Jacobi equations. NoDEA (2012). doi:10.1007/s00030-012-0188-8
Aubin, J.-P.: Chaperoning state evolutions by variable durations. SIAM J. Control Optim. (2013). doi:10.1137/120879853
Aubin, J.-P.: Time and Money. How long and how much money is needed to regulate a viable economy. Springer, Berlin (2013)
Aubin, J.-P.: Traffic Networks as Information Systems: Traffic Regulators (2014) http://hal.upmc.fr/hal-00915425
Aubin, J.-P.: La valeur n’existe pas. À moins que. (in preparation)
Aubin, J.-P.:Traffic Networks as Information Systems: A viability Approach. Springer, New York (in preparation)
Aubin, J.-P., Bayen, A., Saint-Pierre, P.: Viability Theory: New Directions. Springer, Heidelberg (2011)
Aubin, J.-P., Chen, L., Désilles A.: Cournot Maps for Intercepting Evader Evolutions by a Pursuer (in preparation)
Aubin, J.-P., Chen, L., Dordan O.: Generalized Lax-Hopf formulas for cournot maps and Hamilton–Jacobi–McKendrik equations (in preparation)
Aubin, J.-P., Chen, L., Dordan O.: Tychastic Measure of Viability Risk. A viabilist portfolio performance and insurance approach. Springer, Berlin (2014)
Aubin, J.-P., Chen, L., Dordan O.: Retro-prospective differential inclusions and their control by the differential connection tensors of their evolutions: the trendometer. Complex Syst. 23(2), 117–148 (2014)
Aubin, J.-P., Frankowska, H.: Set-Valued Analysis. Birkhäuser, Boston (1990)
Aubin, J.-P., Martin, S.: Travel Time Tubes Regulating Transportation Traffic. Contemp. Math. 1–25 (2009)
Barron, E.N., Jensen, R.: Semicontinuous viscosity solutions for Hamilton–Jacobi equations with convex Hamiltonians. Comm. Partial Differ. Equ. 15, 1713–1742 (1990)
Bayen, A., Claudel, C. Saint-Pierre, P.: Viability-based computations of solutions to the Hamilton-Jacobi-Bellman equation. In Hybrid Systems: Computation and Control, Lecture Notes in Computer Science vol. 4416, pp. 645–649. Springer, Berlin (2007)
Bayen, A., Claudel, C., Saint-Pierre, P.: Computations of solutions to the Moskowitz Hamilton-Jacobi-Bellman equation under viability constraints. In: Proceedings of the 46th IEEE Conference on Decision and Control (CDC), New Orleans, LA (2007). http://www.ce.berkeley.edu/~bayen/conferences/cdc07a
Cahuc, P., Zylberberg, A.: Le chômage, fatalité ou nécessité?. Flammarion (2004)
Cardaliaguet, P., Quincampoix, M., Saint-Pierre, P.: Temps optimaux pour des problèmes avec contraintes et sans contrôlabilité locale. Comptes-Rendus de l’Académie des Sciences Série 1 Paris 318, 607–612 (1994)
Chen, L., Computation of the “Enrichment” of a Value Functions of an Optimization Problem on Cumulated Transaction-Costs through a Generalized Lax-Hopf Formula, HAL-UPMC 00925272 (submitted). http://hal.upmc.fr/docs/00/92/52/72/PDF/LuxiLiquidity-Hal
Claudel, C., Bayen, A.: Solutions to switched Hamilton–Jacobi equations and conservation laws using hybrid components. In: Egerstedt, M., Mishra, B., (eds.) Hybrid Systems: Computation and Control, Lecture Notes in Computer Science, vol. 4981, pp. 101–115. Springer, Berlin (2008)
Claudel, C., Bayen, A.: Computations of solutions to the Moskowitz Hamilton–Jacobi–Bellman equation under trajectory constraints. In: Proceedings of the 46th IEEE Conference on Decision and Control (CDC), Cancun, Mexico (2008)
Costesèque, G.: Contribution à l’étude du trafic routier sur réseaux à l’aide des équations d’Hamilton–Jacobi. Doctoral Thesis, Université Paris-Est (2014)
Costeseque, G., Lebacque, J.-P., Monneau, R.: A convergent scheme for Hamilton-Jacobi equations on a junction: application to traffic (2013). arXiv:1306.0329
Costeseque, G., Lebacque, J.-P. et al.: A variational formulation for higher order macroscopic traffic flow models: numerical investigation (2013)
Désilles, A.: Viability approach to Hamilton–Jacobi–Moskowitz problem involving variable regulation parameters. Appl. Math. J. Netw. Heterogeneous Media 8(3), 707–726 (2013)
Evans, L.C.: Partial Differential Equations. American Mathematical Society, Providence, RI (1998)
Frankowska, H.: Lower semicontinuous solutions to Hamilton–Jacobi–Bellman equations. In: Proceedings of the 30th IEEE Conference on Decision and Control, Brighton (1991)
Frankowska, H.: Lower semicontinuous solutions of Hamilton–Jacobi–Bellman equations. SIAM J. Control Optim. 31, 257–272 (1993)
Frankowska, H.: Optimal synthesis via superdifferentials of value function. Control Cybern. 34, 787–803 (2005)
Lebacque, J.P., Haj-Salem, H., Mammar, S.: Second order traffic flow modeling: supply-demand analysis of the inhomogeneous Riemann problem and of boundary conditions. In: Proceedings of the 10th Euro Working Group on Transportation (EWGT), 3 (2005)
Lorentz, T.: First-order geometric evolutions and semilinear evolution equations: a common mutational approach, Thesis (2004). http://www.ub.uni-heidelberg.de/archiv/4949
Lorenz, T.: Mutational analysis: a joint framework for cauchy problems in and beyond vector spaces. In: Series Lecture Notes in Mathematics, vol. 1996, Springer, Berlin (2010)
Piketty, T.: Le Capital au XXI\(^{e}\) siècle, Le Seuil (2013)
Quincampoix, M.: Frontières de domaines d’invariance et de viabilité pour des inclusions différentielles avec contraintes. Comptes-Rendus de l’Académie des Sciences, Paris 311, 411–416 (1990)
Rockafellar, R.T., Wets, R.: Variational Analysis. Springer, Berlin (1997). [42, Saint-Pierre]
Saint-Pierre, P.: Approximation of the viability kernel. Appl. Math. Optim. 29, 187–209 (1994)
Vandanjon, P.-O., Coiret, A., Lorino, T.: Application of viability theory for road vehicle active safety during cornering manoeuvres. Vehicle Syst. Dyn. (2014). doi:10.1080/00423114.2013.873813.
Acknowledgments
This work was partially supported by the Commission of the European Communities under the 7th Framework Programme Marie Curie Initial Training Network (FP7-PEOPLE-2010-ITN), project SADCO, contract number 264735 and ANR-11-ASTRID-0041-04. The author thanks also Alexandre Bayen, Alain Bensoussan, Luxi Chen, Guillaume Costesèque, Olivier Dordan and Anya Désilles for advises, remarks and “disputations” on this topic.
Author information
Authors and Affiliations
Corresponding author
Appendix: Tangent Cones and Derivatives
Appendix: Tangent Cones and Derivatives
The Viability TheoremFootnote 24 characterizes the viability of a subset under tangent cones: it states that, under adequate assumptions, a closed subset is viable under a differential inclusion if at every element, there exists a velocity “tangent” to the set at this element. Hence, the results of viability theory depend upon the definition of tangent to a closed subset.
By definition, the contingent cone \(T_{K}(x)\) to \(K\) at \(x \in K\) is the set of directions \(v \in X\) such that there exist a sequence \(h_{n} \mapsto 0+\) from the right and a sequence \(v_{n} \rightarrow v\) satisfying
This statement assumes that the values \(x+h_{n}v_{n}\) are forecast (but not known) in the future since \(h_{n}>0\). This is the reason why they are called prospective contingent directions (defined for departure positions, for instance).
Since only the past can be known, it may be reasonable to look for directions \(\overleftarrow{v}\) such that there exist a sequence \(h_{n} \mapsto 0+\) from the right and a sequence \(\overleftarrow{v}_{n} \rightarrow \overleftarrow{v}\) satisfying
This implies that \(\overleftarrow{v} \in -T_{K}(x)=: \overleftarrow{T}_{K}(x)\). They are called retrospective contingent directions (defined for arrival positions, for instance).
We associate with the concept of tangent cone the concept of contingent derivative \(DF(x,y)\) of a set-valued map \(F:X \leadsto Y\) at a pair \((x,y) \in \mathrm{Graph}(F)\) of its graph, graphically defined by
This means that \(v \in DF(x,y)\) if and only if there exist sequences \(h_{n}\rightarrow 0+\), \(u_{n} \rightarrow u\) and \(v_{n} \rightarrow v\) such that
In other words, the contingent derivative is the limit of “set-valued differential quotients”.
The retrospective contingent derivative \(\overleftarrow{D}F(x,y)\) of a set-valued map \(F:X \leadsto Y\) at a pair \((x,y) \in \mathrm{Graph}(F)\) of its graph is graphically defined by
This means that \(\overleftarrow{v} \in \overleftarrow{D}F(x,y)(\overleftarrow{u})\) if and only if there exist sequences \(h_{n}\rightarrow 0+\), \(\overleftarrow{u}_{n} \rightarrow \overleftarrow{u}\) and \(\overleftarrow{v}_{n} \rightarrow \overleftarrow{v}\) such that
Extended functions \(V: X \mapsto \{-\infty \} \cup \mathbb {R}\cup \{+\infty \}\) are characterized by their hypographs defined by
Extended functions \(V: X \mapsto \{-\infty \} \cup \mathbb {R}\cup \{+\infty \}\) are characterized either by their epigraphs or hypographs defined respectively by
We define epi and hypo derivatives \(D_{\uparrow }V(x)\) and \(D_{\downarrow } V(x)\) by
and their retrospective epi and hypo derivatives \(\overleftarrow{D}_{\uparrow }V(x)\) and \(\overleftarrow{D}_{\downarrow } V(x)\) by
One can check that
We refer to Set-Valued Analysis, [18, Aubin and Frankowska], Traffic Networks as Information Systems. A viability Approach, [12, Aubin], and to [17, Aubin et al.] for more detailed consequences of these concepts.
Rights and permissions
About this article

Cite this article
Aubin, JP. Regulation of Viable and Optimal Cohorts. Appl Math Optim 72, 203–232 (2015). https://doi.org/10.1007/s00245-014-9277-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00245-014-9277-x