
Abstract
Heat pipes provide highly efficient heat transfer and are powerful tools in thermal management systems. In contrast to most established systems, heat pipes operating within moving systems such as electric vehicles or machine tools are exposed to unsteady acceleration forces. In order to guarantee proper heat pipe function in scenarios involving accelerated movement, it is necessary to examine the effect of acceleration forces on the heat pipe behavior. This paper presents experimental investigations on the thermal performance of translationally moving heat pipes. The designed experimental set-up consists of a measurement platform mounted to a linear direct drive. By obtaining the temperature gradient between evaporator and condenser section, the thermal resistance of heat pipes is determined at standstill and under linear motion. The experiments were conducted using heat pipes with sintered, mesh and grooved wicks. The results demonstrate the motion influence on the thermal resistances depending on the heat pipe orientation and heat input.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Heat pipes are passive heat transfer devices with very low thermal resistance. The effective thermal conductivity of heat pipes can reach up to the order of 105 W/(m K) [1, 2]. The exceptional heat transfer characteristics of heat pipes are based on a two-phase cycle of a working fluid within a hermetically sealed, typically tubular vessel. In many cases, water is used as working fluid, but the use of numerous working fluids has been analyzed in literature [3,4,5,6]. Heat applied to one side of the heat pipe (evaporator) leads to the vaporization of the working fluid. Due to the resulting pressure difference, the gaseous phase flows to the other end (condenser) where it condenses releasing its phase change enthalpy to the provided heat sink. The heat pipe contains a wick structure providing a capillary pressure that forces the liquid phase back to the evaporator section. However, the heat pipe behavior depends highly on its orientation as gravity-opposed orientations hinder the liquid flow. Consequently, the selection of a suitable wick structure is a topic widely discussed in literature [7,8,9,10,11]. Typical wick structures are sintered, mesh and grooved structures.
Heat pipes are used in a wide variety of application fields. Typical applications of heat pipes are thermal control of computer systems, solar cells and nuclear power reactors [12,13,14]. A novel field of heat pipe research is the thermal error compensation in machine tools. Thermal issues in machine tools have been of great interest recently. As stated in [15], up to three out of four geometric errors of machined workpieces are thermally induced. A currently investigated approach is the integration of heat storage and heat transfer components into machine tools aiming for a smoother temperature response of critical machine parts to heat inputs [16, 17]. While heat losses in the machine tool can be transferred by heat storage components on a timely scale, heat pipes can be used to create thermal connections between different machine parts, heat storage components and cooling elements.
Another possible application field of heat pipes are battery cooling systems of electric vehicles. Numerous numerical and experimental studies indicate high potential for heat pipes in battery cooling systems leading to higher energy efficiency and smaller temperature gradients [18,19,20].
Both application scenarios – machine tools and electric vehicles – exhibit unsteady motion profiles. The occurring acceleration forces potentially affect the performance of heat pipes in corresponding systems. It is expected that typical acceleration forces in these fields of application have an impact on the two phase fluid circulation in the heat pipe in a manner that lowers or increases the heat transfer limits depending on the heat pipe and motion parameters. The present paper deals with the examination of the influence of linear motion on the heat pipe performance.
In literature, the thermal behavior of rotating heat pipes has been topic of numerous studies. An overview over rotating heat pipes is given in [1]. However, few comprehensive studies on the influence of translational acceleration on heat pipe behavior have been presented in literature. Several studies focus on the effect of vibrations on the thermal heat pipe performance. In [21], the presence of low-frequency vibrations between 0 and 30 Hz was found to decrease the thermal resistance of a copper heat pipe in vertical, gravity-assisted orientation. Similar results were obtained in [22] with longitudinal vibrations on a heat pipe in horizontal orientation. In [23], the effect of longitudinal vibration on the capillary limit of a wrapped screen wick copper–water heat pipe was determined. The results demonstrate that the vibrations cause a decrease in the capillary heat transport limit. A study on the effect of transverse vibration demonstrated no significant influence on the capillary limit of the examined heat pipe [24]. Another study presents experimental investigations on the thermal behavior of a copper–water heat pipe in a varying acceleration field using a centrifuge table [25]. It was found that the imposed acceleration field increased the heat pipe thermal resistance. This effect could be reduced by increasing the acceleration frequency. A centrifuge table has also been used in [26] to examine the effect of high acceleration on the performance of a sintered copper heat pipe. According to the results, an acceleration of 3 g caused the evaporator to dry out when applied against the direction of the liquid flow. For the opposite orientation, accelerations of 3 g led to improved heat pipe performance, while accelerations of 6 g and higher resulted in large-amplitude oscillations of the evaporator temperatures.
This paper presents experimental investigations on the effect of translational acceleration on the thermal performance of heat pipes. The characterization of three conventional heat pipes with different capillary structures is illustrated using an experimental set-up that allows for thermal characterization of static and translationally accelerated heat pipes. Thermal resistances are determined for different orientations and compared with respect to the motion state.
2 Methods
In order to examine the thermal heat pipe performance for different heat pipes, inclinations and motion states, an experimental set-up was used providing a measurement and motion environment. The first part of the conducted experiments aimed for the thermal heat pipe characterization at standstill. Based on the static measurement results, the second part of the experiments focused on the detection of deviating heat pipe behavior under cyclic translational acceleration.
2.1 Preliminary investigations
The heat transfer properties of heat pipes can be described by means of the thermal resistance. The thermal resistance of a heat pipe with the evaporator temperature \({\text{T}}_{\text{eva}}\) and the condenser temperature \({\text{T}}_{\text{cond}}\) at a heat flux \(\dot{Q}\) can be expressed as
The thermal resistance of a heat pipe usually is not constant and has to be obtained as a function of heat flow and inclination.
In addition to the thermal resistance, heat pipes are characterized by heat transfer limits. For the operation of a heat pipe it is essential that the capillary pumping pressure \(\Delta{p}_{\text{c,max}}\) is higher than the total pressure drop in the heat pipe. For correct heat pipe operation
has to apply where \(\Delta{p}_{\text{l}}\) is the pressure drop required to return the liquid to the evaporator, \(\Delta {p}_{\text{v}}\) the pressure drop necessary to cause the vapour to flow to the condenser and \(\Delta {p}_{\text{g}}\) the pressure difference due to the hydrostatic head of liquid depending on the heat pipe inclination. If this condition is not met, the fluid circulation stops leading to a dry-out of the evaporator (capillary limit). While different physical limitations to the heat transfer in heat pipes exist, it is usually the capillary limit that defines the maximum heat flow of a heat pipe.
As pointed out in [26], body forces opposed to the direction of the liquid flow due to unfavorable axial acceleration increase the liquid pressure drop and decrease the capillary limit. In contrast, body forces acting along the liquid flow direction can support the liquid flow to the evaporator section. For the case of motion transversal to the heat pipe axis, no significant effect on the heat pipe performance is expected. In gravity-opposed orientations however, the transversal motion potentially counteracts the evaporator dry-out.
The present work aims to characterize the thermal performance of conventional heat pipes in the context of development of heat pipe based systems for thermal control in moving machine tool parts. Hence, a cyclic point-to-point movement was considered as motion scenario for the experimental investigations with motion parameters typical for machine tool feed drives.
Aiming for a comprehensive, general insight on typical heat pipe behavior under linear motion, conventional, commercially available heat pipes were considered for the experimental investigations. Heat pipes with three different capillary types – sinter, groove and screen-covered groove – were chosen. The specifications of the heat pipes are given in Table 1.
In order to obtain detailed information on the capillary structures of the examined heat pipes, images were taken of the cross sections using optical microscopy. Three slices of each heat pipe type were examined. Additionally, a frontal image of the screen mesh was obtained. The microscopy images are shown in Fig. 1.

Microscopy images of the examined heat pipes with sintered wick a, composite wick b, c and grooved wick d
The geometrical parameters of the capillary structures were determined based on the microscopy data. By evaluating the segmented areas of the 2D image of the sintered heat pipe, an approximated porosity of 52% was obtained. As seen in the image, the sintered wick is unevenly distributed over the inner pipe circumference. The mean thickness of the sintered layer amounts to approximately 750 µm. For the heat pipes with homogeneous grooved wick and screen-covered grooves, a mean distance of 330 µm between two adjacent grooves was obtained. The approximated groove height amounts to 210 µm for the grooved heat pipe and 240 µm for the composite wick heat pipe. The screen mesh consists of copper wires with a diameter of 50 µm and exhibits a mesh wire spacing of approximately 225 µm.
The heat pipe behavior is significantly affected by two wick properties, namely the permeability and the capillary forces generated by the wick. As pointed out in [1], decreasing pore size generally leads to increased capillary pumping and decreased permeability. Consequently, the sintered heat pipe provides the highest capillary pressure, but exhibits the lowest permeability compared to the other two investigated heat pipes. The grooved heat pipe exhibits the highest permeability and lowest capillary pumping. The heat pipe with screen-covered grooves provides a higher capillary pressure than the grooved heat pipe without screen mesh due to the composite wick structure. However, the inserted screen mesh leads to a decreased permeability as it increases the liquid flow resistance.
2.2 Experimental set-up
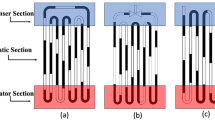
The experimental investigations were conducted on a set-up based on a linear drive system. A linear direct drive was chosen as the motion source due to its high dynamics. The central element of the experimental set-up mounted onto the linear motor is an aluminum framework containing four copper blocks for heat pipe fixation and thermal loading. The evaporator section of the heat pipe is clamped between two copper blocks heated by one cartridge heater each. The two copper blocks at the condenser section are cooled by silicon oil flowing through cylindrical channels. Both heat source and heat sink assemblies are surrounded by acrylonitrile butadiene styrene (ABS) components serving as thermal insulation. The heat pipe is thermally insulated by components made of expanded polypropylene (EPP). In order to examine the heat pipe performance at different inclination angles, the heat pipe assembly is rotatably mounted within the aluminum framework. Thermocouples of type J were used to measure the temperature within the cartridge heaters. Thermocouples of type K were used to measure the temperature at the evaporator, adiabatic and condenser section of the heat pipe as well as the insulation and ambient temperature. The heat pipe assembly and the sensor positions are illustrated in Fig. 2.

Heat pipe assembly and sensor positions
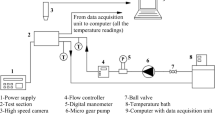
In addition to the heat pipe assembly and the linear motor, the experimental set-up consists of a power supply, a circulation thermostat and a data acquisition system. A DC power supply (Aim-TTi QPX1200SP) provided the power input into the cartridge heaters. The power input and the temperature sensor data were logged using a data acquisition module (OMB-DAQ-2416). The silicon oil cooling and circulation was realized by a circulation thermostat (LAUDA ECO Silver RE 420). The control of power input into the cartridge heaters as well as the status and set-point temperature of the cooling thermostat were controlled within a LABVIEW environment. A schematic representation of the entire experimental set-up is shown in Fig. 3.

Schematic of the experimental set-up
2.3 Experimental procedure
The first experiments were conducted without motion (static test case). Each measurement was started with a 30 min cooling period with the oil temperature set to 20 °C. Afterwards, a constant power supply was provided to the cartridge heaters until stationary state was reached. The temperature field was defined to be stationary when temporal fluctuation of all temperature curves fell below 0.5 K over the last 30 min. Between successive heating periods a 30 min cooling period was realized to provide similar initial conditions for each heat input level.
The second set of experiments was conducted with active feed drive (dynamic test case). During cooling periods with the heat sources switched off, the experimental procedure was identical to the static test case. Throughout the heating periods, the heat pipe assembly moved periodically between the axis positions of 200 mm and 500 mm. Between those two positions, the system accelerates and decelerates at 5 m/s2 and −5 m/s2, respectively. The feed motion profile used for the dynamic measurements is shown in Fig. 4.

Feed motion profile used during dynamic experiments
The heat transfer limit was considered exceeded when for a given heat input thermal equilibrium could not be reached within 240 min. To avoid overheating of the set-up, a critical temperature of 100 °C was defined. Each time a temperature sensor value exceeded this temperature, the heat supply was shut down.
The static and dynamic experiments were conducted for three different heat pipe inclinations δ:
-
gravity-assisted orientation (\(\delta =90^\circ\), heat source at the bottom),
-
horizontal orientation (\(\delta =0^\circ\)) and.
-
gravity-opposed orientation (\(\delta =-90^\circ\), heat source on top).
As the dynamic experiments feature horizontal motion of the heat pipe assembly, the motion axis is perpendicular to the heat pipe axis for the vertical inclination scenarios. For the horizontal inclination scenario, the motion axis and heat pipe axis are congruent.
The oil temperature was set to a value close to typical ambient temperatures at the set-up location for all experiments. Thereby, it was intended to prevent significant convective heat transfer between the heat pipe assembly and the ambient air. In addition to the thermal insulation of the relevant assembly parts, this measure was taken to further reduce the potential error influence caused by higher convective heat transfer coefficients during the dynamic testing.
In order to evaluate the repeatability of the experiments, the measurements for selected test parameters were taken three times. The relative standard deviation (RSD)
was calculated for each set of repeated experiments, where \(i\) denotes the index of the measurement and \({R}_{\text{th.mean}}\) the mean thermal resistance within the set.
3 Results and discussion
The experimental results are evaluated by means of the thermal resistances and temperature gradients between evaporator and condenser section according to Eq. 2. For evaporator and condenser temperatures the mean values of the corresponding sensor data are used.
3.1 Sintered heat pipe
The results for the sintered heat pipe are demonstrated in Fig. 5. The obtained thermal resistance curves share similar characteristics for the different heat pipe orientations. All curves exhibit a minimum value at a certain power level. At lower and higher power levels, the resistances are significantly higher than the respective minimum values. The heat transfer limits were found to be 85 W for gravity-assisted orientation (static and dynamic test case) and 12 W for gravity-opposed orientation (static and dynamic test case). For horizontal orientation the heat transfer limit was obtained with 38 W for the static test case und 42 W for the dynamic test case. The minimum thermal resistance of the heat pipe equals 0.10 K/W for \(\delta =90^\circ\) (at 25 W), 0.20 K/W for \(\delta =0^\circ\) (at 14 W) and 0.38 K/W for \(\delta =-90^\circ\) (at 5 W). The results demonstrate a high dependency of the orientation on the heat pipe performance. The acceleration forces during movement do not have significant influence on the thermal resistance for gravity-assisted orientation. However, the thermal resistances at horizontal orientation are around 18% lower during movement. Close to the heat transfer limit the thermal resistance at dynamic state is around 40% lower as the thermal resistance at static state and the heat transfer limit at dynamic state is higher. For gravity-opposed orientation, the resistance curves are similar for heat input levels less than or equal to 6 W. Within the range of 7 W and 10 W, the resistances are approximately 30% higher at dynamic state. At 12 W heat input, the dynamic value is around 9% lower than the static value.

Experimentally obtained thermal resistance curves and temperature gradients for sintered heat pipe at inclinations of 90° a, 0° b and −90° c
During preliminary examination of the heat pipe performance for gravity-opposed orientation, significant deviations between thermal resistance values were observed for consecutively conducted measurements with similar heat input. This effect appeared during both static and dynamic tests and arose especially when the heat input of the preceding measurement was close to the heat transfer limit of the heat pipe. It became clear that the heat pipe performance was highly affected by previous dry-out conditions of the evaporator. In order to achieve consistent results, the evaporator section needed to be rewetted prior to each gravity-opposed measurement. This initial condition was realized by heating the condenser section to 60 °C and subsequent cooling. Table 2 demonstrates the differences in temperature gradient and thermal resistance obtained for the sintered heat pipe with and without preliminary rewetting of the evaporator section. By means of the rewetting procedure the thermal resistance at a heat input of 6 W was reduced by around 61% for both static and dynamic tests.
However, throughout the preliminary examinations the consistency of the results for horizontal and gravity-assisted orientation was found to be significantly higher than the results for gravity-opposed orientation. Consequently, the repeatability of the experiments for gravity-opposed orientation was further investigated. The experiments for three different heat inputs were conducted three times and evaluated by means of the RSD calculated according to Eq. 3. The results shown in Table 3 indicate a maximum relative deviation of 4.2% for the considered test parameters.
3.2 Heat pipe with screen-covered grooves
The thermal resistance curves obtained for the heat pipe with screen-covered grooves are shown in Fig. 6. For gravity-assisted and horizontal orientation, the thermal resistance is monotonically decreasing with increasing heat input. At low heat input values, the thermal resistance is significantly higher reaching 0.271 K/W at 5 W for \(\delta =90^\circ\) for both static and dynamic test case. The minimum thermal resistance obtained is 0.134 K/W at 180 W for both test cases. An influence of the motion on the performance at gravity-assisted orientation could not be observed.

Experimentally obtained thermal resistance curves and temperature gradients for heat pipe with screen-covered grooves at inclinations of 90° a, 0° b and −90° c
For horizontal orientation the resistance values were found to be in the range of 0.196…0.374 K/W and 0.190…0.279 K/W for static and dynamic test case, respectively. The obtained values are around 20% lower for the dynamic test case. However, the heat transfer limit is significantly higher for the static test case. The maximum heat input for which stationary state could be reached was found to be 50 W and 20 W for static and dynamic test case, respectively. Heat inputs exceeding these values led to a sharp increase of the evaporator temperature during heating, as shown in Fig. 7 for the static test case. At the same moment, a temperature drop at the condenser could be observed. The acceleration forces apparently hinder the fluid circulation at horizontal orientation. Consequently, the dry-out of the evaporator section occurs at a significantly lower heat input level under motion.

Measured temperatures during heating for heat pipe configuration with screen-covered grooves at 0° inclination and 55 W heat input. The heat sources were shut off after 1800s
The heat pipe with screen-covered grooves exhibited poor performance at gravity-opposed orientation. The thermal resistance was found to be above 6 K/W for both static and dynamic test case. For heat inputs above 2 W steady state was not reached. Besides the high temperature gradients, the high thermal resistance of the heat pipe at gravity-opposed orientation became apparent by means of the heating time required to reach thermal equilibrium. While for the other configurations steady state was reached within 90 min, at \(\delta =-90^\circ\) the required heating time was approximately 240 min. A statistical investigation of the repeatability of the experiments at gravity-opposed orientation concluded in a maximum relative deviation of 5% for the considered load scenarios shown in Table 4.
3.3 Grooved heat pipe
The obtained thermal resistance curves for the grooved heat pipe are shown in Fig. 8. For gravity-assisted orientation, the obtained thermal resistance values range between 0.48 K/W at a heat input of 5 W and 0.04 K/W at 248 W. Slight differences in the thermal behavior between static and dynamic scenario were observed. The temperature gradients during static testing were found to be around 5% higher leading to a shut-off of the heat source at 248 W. However, the temperature of the insulation surface was up to 5 K above ambient temperature at the higher heat input levels causing an increasing dependency on the convective heat transfer to ambient air with increasing thermal load. The results hence do not indicate a significant influence on the heat pipe performance of the motion for gravity-assisted orientation.

Experimentally obtained thermal resistance curves and temperature gradients for grooved heat pipe at inclinations of 90° a and 0° b
At horizontal orientation, the grooved heat pipe exhibits identical thermal resistance values at heat input smaller or equal than 40 W for both test cases. For thermal loads above 40 W, no stationary state was reached during static testing. In contrast, the moving heat pipe transferred heat loads up to 217 W. The results indicate a highly favorable influence of the motion on the thermal performance of the horizontally oriented heat pipe. In order to exclude the possibility of a dried-out evaporator at the beginning of the experiment, the static testing was repeated at a heat input of 50 W with the evaporator rewetted prior to the thermal loading. After two hours of heating, the evaporator temperature was still strongly increasing almost reaching 100 °C. Hence, it can be concluded that the dry-out of the condenser occurred during heating at 50 W. According to the results, the motion supports the fluid flow inside the heat pipe increasing the heat transfer limit at least by a factor of five.
At gravity-opposed orientation, heat inputs of 0.5 W, 1 W and 3 W were applied. However, none of the corresponding experiments led to stationary state within 240 min. The transient temperatures at evaporator and condenser indicated a thermal resistance greater than 10 K/W. This applies for both static and dynamic test case.
The experiments were repeated for different heat input levels at horizontal and gravity-assisted orientation. The results are shown in Table 5. The maximum relative deviation of the measured values was found to be around 4.8%.
4 Conclusions
Experimental investigations were carried out to study the effect of translational acceleration on the thermal performance of heat pipes with different capillary structures. An experimental set-up was used to obtain the thermal resistance of a sintered wick heat pipe, a grooved wick heat pipe and a composite wick heat pipe under varying heat loads at different inclination angles. At first, the heat pipe performance was examined at standstill. In a second step, the experiments were repeated under cyclic translational acceleration in the order of 0.5 g. The results demonstrate that the effect of the acceleration forces on the thermal performance highly depends on the capillary structure of the heat pipe.
The examined sintered heat pipe exhibits a low dependency of motion on the thermal resistance and heat transfer limit. The heat transfer limit at horizontal orientation was found to be slightly higher under motion. At gravity-opposed orientation, the motion led to a mainly increased thermal resistance. The experiments with the heat pipe with screen-covered grooves showed a high difference between the heat transfer limits at static and dynamic test case. Compared to the heat transfer limit at standstill, the heat transfer limit under motion was found to be less than the half. The highest influence of the motion on the thermal heat pipe characteristics was observed for the grooved heat pipe. At horizontal orientation, the motion led to an increase of the heat transfer limit at least by a factor of five.
The presented results can be used to estimate the thermal behavior of heat pipes in moving systems such as machine tools. In terms of the experimentally obtained thermal resistance curves, the heat pipe characteristics can be modelled within the design process of corresponding heat pipe systems. The observations of this study however indicate a complex behavior of the fluid circulation inside heat pipes exposed to unsteady body forces. In order to better understand the underlying correlations, further investigations with different motion profiles and heat pipe geometries need to be carried out.
Availability of data and material
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Reay D, McGlen R, Kew P (2014) Heat pipes. Theory, design and applications, 6th edn. Butterworth-Heinemann
El-Nasr A, El-Haggar S (1996) Effective thermal conductivity of heat pipes. Heat Mass Transfer 32:97–101. https://doi.org/10.1007/s002310050097
Joo HJ, Kwak HY (2017) Experimental analysis of thermal performance according to heat pipe working fluid for evacuated tube solar collector. Appl Therm Eng 53:3267–3275. https://doi.org/10.1007/s00231-017-2029-0
Wannapakhe S, Rittidech S, Bubphachot B, Watanabe O (2009) Heat transfer rate of a closed-loop oscillating heat pipe with check valves using silver nanofluid as working fluid. J Mech Sci Technol 23:1576–1582. https://doi.org/10.1007/s12206-009-0424-2
Senthilkumar C, Krishnan AS, Brusly Solomon A (2019) Effect of thin porous copper coating on the performance of wickless heat pipe with R134a as working fluid. J Therm Anal Calorim 139:963–973. https://doi.org/10.1007/s10973-019-08176-x
Di Paola R, Savino R, Mirabile Gattia D, Marazzi R, Vittori Antisari M (2011) Self-rewetting carbon nanofluid as working fluid for space and terrestrial heat pipes. J Nanopart Res 13:6207–6216. https://doi.org/10.1007/s11051-011-0601-y
Guichet V, Khordehgah N, Jouhara H (2020) Experimental investigation and analytical prediction of a multi-channel flat heat pipe thermal performance. International Journal of Thermofluids 5-6.https://doi.org/10.1016/j.ijft.2020.100038
Li Z (2018) Design and preliminary experiments of a novel heat pipe using a spiral coil as capillary wick. Int J Heat Mass Transf 126:1240–1251. https://doi.org/10.1016/j.ijheatmasstransfer.2018.05.110
Chen Z, Tong X, Liu H, Guo C, Qu F, Cong H (2017) A design of the Micro-Plate Loop Heat Pipe and development of the porous nickel capillary wick. Procedia Engineering 205:3931–3937. https://doi.org/10.1016/j.proeng.2017.10.031
Jafari D, Wits WW, Geurts BJ (2020) Phase change heat transfer characteristics of an additively manufactured wick for heat pipe applications. Appl Therm Eng 168. https://doi.org/10.1016/j.applthermaleng.2019.114890
Xin F, Ma T, Wang Q (2018) Thermal performance analysis of flat heat pipe with graded mini-grooves wick. Appl Energy 228:2129–2139. https://doi.org/10.1016/j.apenergy.2018.07.053
Vasiliev LL (2005) Heat pipes in modern heat exchangers. Appl Therm Eng 25:1–19. https://doi.org/10.1016/j.applthermaleng.2015.02.030
Laubscher R, Dobson RT (2013) Theoretical and experimental modelling of a heat pipe heat exchanger for high temperature nuclear reactor technology. Appl Therm Eng 61:259–267. https://doi.org/10.1016/j.applthermaleng.2013.06.063
Pastukhov VG, Maydanik YF (2007) Low-noise cooling system for PC on the base of loop heat pipes. Appl Therm Eng 27:894–901. https://doi.org/10.1016/j.applthermaleng.2006.09.003
Mayr J, Jedrzejewski J, Uhlmann E, Donmez MA, Knapp W, Härtig F, Wendt K, Moriwaki T, Shore P, Schmitt R, Brecher C, Würz T, Wegener K (2012) Thermal issues in machine tools. CIRP Ann 61:771–791. https://doi.org/10.1016/j.cirp.2012.05.008
Voigt I, Drossel W-G, Bucht A, Winkler S, Werner R (2018) Latent heat storage with shape memory alloy thermal switch for thermal error compensation on linear direct drive, Proceedings of the 16th Mechatronics Forum International Conference
Voigt I, Navarro de Sosa I, Wermke B, Bucht A, Drossel WG (2019) Increased thermal inertia of ball screws by using phase change materials. Appl Therm Eng 155:297–304. https://doi.org/10.1016/j.applthermaleng.2019.03.079
Jouhara H, Serey N, Khordehgah N, Bennett R, Almahmoud S, Lester SP (2020) Investigation, development and experimental analyses of a heat pipe based battery thermal management system, International Journal of Thermofluids 1–2. https://doi.org/10.1016/j.ijft.2019.100004
Bernagozzi M, Charmer S, Georgoulas A, Malavasi I, Michè N, Marengo M (2018) Lumped parameter network simulation of a Loop Heat Pipe for energy management systems in full electric vehicles. Appl Therm Eng 141:617–629. https://doi.org/10.1016/j.applthermaleng.2018.06.013
Behi H, Karimi D, Behi M, Jaguemont J, Ghanbarpour M, Behnia M, Berecibar M, Van Mierlo J (2020) Thermal management analysis using heat pipe in the high current discharging of lithium-ion battery in electric vehicles, Journal of Energy Storage 32. https://doi.org/10.1016/j.est.2020.101893
Alaei A, Kafshgari MH, Rahimi SK (2013) A vertical heat pipe: an experimental and statistical study of the thermal performance in the presence of low-frequency vibrations. Heat Mass Transfer 49:285–290. https://doi.org/10.1007/s00231-012-1057-z
Chen RH, Lin YJ, Lai CM (2013) The Influence of Horizontal Longitudinal Vibrations and the Condensation Section Temperature on the Heat Transfer Performance of a Heat Pipe. Heat Transfer Eng 34:45–53. https://doi.org/10.1080/01457632.2013.694776
Huber NF, Bowman WJ (1996) Longitudinal vibration effects on a copper/water heat pipe’s capillary limit. J Thermophys Heat Transfer 10:90–96. https://doi.org/10.2514/3.757
Charlton MC, Bowman WJ (1994) Effect of transverse vibration on the performance of a heat pipe. J Spacecr Rocket 31:914–916. https://doi.org/10.2514/3.26534
Scott K, Yerkes T, Yerkes KL (1997) Quasi-Steady-State Performance of a Heat Pipe Subjected to Transient Acceleration Loadings. J Thermophys Heat Transfer 11:306–309. https://doi.org/10.2514/2.6239
Asias A, Shusser M, Leitner A, Nabi A, Grossman G (2007) Instability of Heat Pipe Performance at Large Axial Accelerations. J Heat Transfer February 129:137–140. https://doi.org/10.1115/1.2402177
Acknowledgements
The authors would like to thank the German Research Foundation (DFG) for financial support within the Collaborative Research Centre Transregio 96.
Funding
Open Access funding enabled and organized by Projekt DEAL. The research leading to these results received funding from the German Research Foundation (DFG) within the Collaborative Research Centre Transregio 96 (subproject C02).
Author information
Authors and Affiliations
Contributions
Both authors contributed to the study conception and design. Data collection and analysis was performed by Immanuel Voigt. Both authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflicts of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Voigt, I., Drossel, WG. Experimental investigation of heat pipe performance under translational acceleration. Heat Mass Transfer 58, 209–219 (2022). https://doi.org/10.1007/s00231-021-03106-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00231-021-03106-w