
Abstract
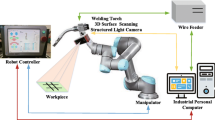
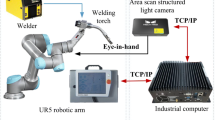
Impellers are widely used in industrial equipment. Currently, the welding of impeller blades is mainly accomplished by manual welding. Aiming at the current situation of impeller production, this paper mainly introduces a novel welding path planning method based on point cloud for robotic welding of impeller blades. Firstly, in order to get rid of the traditional teaching-playback mode and offline programming method of welding robots, this paper adopts the scheme of the automatic welding path planning based on point cloud obtained by a three-dimensional vision structured light camera. To facilitate subsequent sampling and filtering of point cloud, a novel method for three-dimensional camera pose planning is proposed to accurately and efficiently obtain the point cloud and coordinates containing the welding seam information. After filtering the impeller point cloud, a novel algorithm for rough extraction of impeller blades welding seam scattered point cloud based on distance information is proposed. We use MATLAB simulation to choose a polynomial fitting method based on least squares to fit the welding seam scattered point cloud to adapt to the spatial characteristics and diversity of welding seam. Finally, we perform discrete interpolation on the fitted welding seam point cloud to realize the impeller blade welding path planning. Experimental results show that the proposed method can accurately and efficiently realize the welding path planning for impeller blades robotic welding and complete the welding task without teaching and programming before welding.


























Similar content being viewed by others

Availability of data and materials
Not applicable.
References
Liu Y, Liu J, Tian XC (2019) An approach to the path planning of intersecting pipes weld seam with the welding robot based on non-ideal models. Robotics and Computer-Integrated Manufacturing 55:96–108
Manuel RM, Pablo RG, Diego GA, Jesus FH (2017) Feasibility Study of a Structured Light System Applied to Welding Inspection Based on Articulated Coordinate Measure Machine Data. IEEE Sens J 48:4217–4224
Muhammad J, Altun H, Essam AS (2017) Welding seam profiling techniques based on active vision sensing for intelligent robotic welding. Int J Adv Manuf Technol 88:127–145
Zeng JL, Chang BH, Du D, Peng GD, Chang SH, Hong YX, Wang L, Shan JG (2017) A Vision-Aided 3D Path Teaching Method before Narrow Butt Joint Welding. Sensors 17
Hou Z, Xu YL, Xiao RQ, Chen SB (2020) A teaching-free welding method based on laser visual sensing system in robotic GMAW. IEEE/ASME Trans Mechatron 109:1755–1774
Rout A, Deepak BBVL, Biswal BB (2019) Advances in weld seam tracking techniques for robotic welding: A review. Robot. Comput. Integr. Manuf 56:12–37
Xu CQ, Wang JL, Zhang J, Lu C (2020) A new welding path planning method based on point cloud and deep learning. IEEE International Conference on Automation Science and Engineering 786–791
Yang L, Li E, Long T, Fan JF, Liang ZZ (2019) A Novel 3-D Path Extraction Method for Arc Welding Robot Based on Stereo Structured Light Sensor. IEEE Sens J 19:763–773
Zhou P, Peng R, Xu M, Wu V (2021) Path Planning With Automatic Seam Extraction Over Point Cloud Models for Robotic Arc Welding. IEEE ROBOT AUTOM LET 6:5002–5009
Shi L, Tian XC (2014) Automation of main pipe-rotating welding scheme for intersecting pipes. Int J Adv Manuf Technol 77:955–964
Kucuk S (2017) Optimal trajectory generation algorithm for serial and parallel manipulators. Robotics and Computer-Integrated Manufacturing 48:219–232
Pan ZX, Polden J, Larkin N, Duin S (2012) V, Norrish J, Recent progress on programming method of for industrial robots. Robotics and Computer-Integrated Manufacturing 28:87–94
Yang L, Liu YH, Long T, Peng JZ, Liang ZZ (2020) A novel system for off-line 3D seam extraction and path planning based on point cloud segmentation for arc welding robot. Robotics and Computer-Integrated Manufacturing 64
Yu JP, Chen B, Yu HS, Lin C, Zhao L (2018) Neural networks-based command filtering control of nonlinear systems with uncertain disturbance. Inf Sci 2018(426):50–60
Fan CL, Liu C (2015) A novel algorithm for circle curve fitting based on the least square method by the points of the Newton’s rings, International Conference on Computers, Communications and Systems, 256-260
Zhao J, Hu SS, Shen JQ (2011) Changliang Chen and Wei Ding. Mathematical model based on MATLAB for intersection seam of sphere and tube, Trans China Weld Instit 2011(32):89–92
Fu C, Wang QG, Yu JP, Lin C (2020) Neural Network-Based Finite-Time Command Filtering Control for Switched Nonlinear Systems With Backlash-Like Hysteresis. IEEE Transactions on Neural Networks and Learning Systems 99:1–6
Liu Y, Tang Q, Tian XC (2019) A discrete method of sphere-pipe intersecting curve for robot welding by offline programming. Robotics and Computer-Integrated Manufacturin 57:404–411
Yu JP, Shi P, Liu JP, Lin C (2020) Neuroadaptive Finite-Time Control for Nonlinear MIMO Systems With Input Constraint. IEEE Transactions on Cybernetics 99:1–8
Yu JP, Shi P, Chen XK, Cui GZ (2021) Finite-time command filtered adaptive control for nonlinear systems via immersion and invariance. Sci China Inf Sci 64:1–14
Li MY, Du ZJ, Ma XX, Dong W, Gao YZ (2021) A robot hand-eye calibration method of line laser sensor based on 3D reconstruction. Robotics and Computer-Integrated Manufacturing 71
Funding
The authors gratefully thank the research funding from the Shandong Provincial Key Research and Development Program (Major Scientific and Technological Innovation Project) (No. 2019JZZY010441) and National Natural Science Foundation of China (No. U20A20201).
Author information
Authors and Affiliations
Contributions
Yusen Geng was a major contributor in writing the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethical approval
Not applicable.
Consent to participate
Not applicable.
Consent to publish
Not applicable.
Competing interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Geng, Y., Zhang, Y., Tian, X. et al. A novel welding path planning method based on point cloud for robotic welding of impeller blades. Int J Adv Manuf Technol 119, 8025–8038 (2022). https://doi.org/10.1007/s00170-021-08573-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-021-08573-3