
Abstract
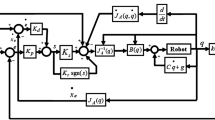
A robotic aircraft flexible tooling system is proposed in this paper, of which high-precision synchronous motion control of dual robots is a key part. In order to alleviate the effects of the mechanical coupling over synchronous and tracking errors of the two robots, a cross-coupling scheme based on an adaptive fuzzy sliding mode controller (AFSMC) is developed. First, the mechanical coupling model is established by dynamics analysis of the dual-robot driving system. Then, a novel cross-coupling error is proposed, which combines both the position and speed tracking and synchronous errors of dual robots. Moreover, the cross-coupling control scheme based on AFSMC is presented. For the proposed AFSMC, a fuzzy logic controller is adopted to generate the hitting control signal, and the output gain of the sliding mode control is tuned online by a supervisory fuzzy system. Finally, the preferable performance of the proposed AFSMC cross-coupling approach is verified by the simulation results compared with the conventional proportional-integral-derivative control and SMC cross-coupling controls.
Similar content being viewed by others

References
Lu JB, Zhou K (2011) Multi-point location theory, method, and application for flexible tooling system in aircraft manufacturing. Int J Adv Manuf Technol 54:729–736. doi:10.1007/s00170-010-2974-y
Rodriguez AA, Nijimeijer H (2004) Mutual synchronization of robots via estimated state feedback: a cooperative approach. IEEE Trans Control Syst Technol 12:542–554. doi:10.1109/TCST.2004.825065
Yan MT, Lee MH, Yen PL (2005) Theory and application of a combined self-tuning adaptive control and cross coupling control in a retrofit milling machine. IEEE/ASME Trans Mechatronics 15:193–211. doi:10.1016/j.mechatronics.2004.07.011
Chien YL, Tung PC, Chu WH (2006) Adaptive fuzzy sliding mode control for an automatic arc welding system. Int J Adv Manuf Technol 29:481–489. doi:10.1007/s00170-005-2539-7
Sun D (2003) Position synchronization of multiple motion axes with adaptive coupling control. Automatica 39:997–1005. doi:10.1016/S0005-1098(03)00037-2
Sun D, Feng GL, Dong CM (2005) Orientation control of a differential mobile robot through wheel synchronization. IEEE/AMSE Trans Mechatronics 10:345–351. doi:10.1109/TMECH.2005.848292
Zhao D, Li S, Gao F, Zhu Q (2009) Robust adaptive terminal sliding mode-based synchronized position control for multiple motion axed systems. IET Control Theory Appl 3:136–150. doi:10.1049/iet-cta:20070272
Ahmed FA, Elsayed AS, Wael ME (2011) Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators. Appl Soft Comput 11:4943–4953. doi:10.1016/j.asoc.2011.06.005
Utkin VI (1993) Sliding mode control design principles and applications to electric drives. IEEE Trans Ind Electron 40:23–26. doi:10.1109/41.184818
Chiu SL, Shyu KK (1998) Novel sliding mode controller for synchronous motor drive. IEEE Trans Aerosp Electr Syst 34:532–542. doi:10.1109/7.670334
Wai RJ (2000) Adaptive sliding-mode control for induction servo motor drive. Proc Inst Elect Eng Electric Power Appl 147:553–562. doi:10.1049/ip-epa:20000628
Liaw CM, Lin FJ (1995) Position control with fuzzy adaptation for induction servomotor drive. Proc Inst Elect Eng Electric Power Appl 142:397–404. doi:10.1049/ip-epa:19952209
Wong LK, Leung FHF, Tam PKS (2001) A fuzzy sliding controller for nonlinear systems. IEEE Trans Ind Electron 48:32–37. doi:10.1109/41.904545
Ha QP (1996) Robust sliding mode controller with fuzzy tuning. Electron Lett 32:1626–1628. doi:10.1049/el:19961085
Lin FJ, Chiu SL (1998) Adaptive fuzzy sliding-mode control for PM synchronous servo motor drives. Proc Inst Elect Eng Contr Theory Appl 145(1):63–72. doi:10.1049/ip-cta:19981683
Choi SB, Park DW, Jayasuriya SA (1994) A time-varying sliding surface for fast and robust tracking control of second-order uncertain systems. Automatica 30:899–904. doi:10.1016/0005-1098(94)90180-5
Eker I (2006) Sliding mode control with PID sliding surface and experimental application to an electromechanical plant. ISA Trans 45:109–118. doi:10.1016/S0019-0578(07)60070-6
Lu YS, Chen JS (1994) A self-organizing fuzzy sliding-mode controller design for a class of nonlinear servo systems. IEEE Trans Ind Electron 41:492–502. doi:10.1109/41.315267
Ha QP, Rye DC, Durrant-Whyte HF (1999) Fuzzy moving sliding mode control with application to robotic manipulators. Automatica 35:607–616. doi:10.1016/S0005-1098(98)00169-1
Wai RJ (2007) Fuzzy sliding-mode control using adaptive tuning technique. IEEE Trans Ind Electron 54(1):586–594. doi:10.1109/TIE.2006.888807
Zeinali M, Notash L (2010) Adaptive sliding mode control with uncertainty estimator for robot manipulators. Mech Mach Theory 45:80–90. doi:10.1016/j.mechmachtheory.2009.08.003
Zhu M, Li Y (2010) Decentralized adaptive fuzzy sliding mode control for reconfigurable modular manipulators. Int J Nonlinear Control 20:472–488. doi:10.1002/rnc.1444
Chen HY, Huang SJ (2004) Adaptive fuzzy sliding-mode control for the Ti6Al4V laser alloying process. Int J Adv Manuf Technol 24:667–674. doi:10.1007/s00170-003-1742-7
Chen HM, Renn JC, Su JP (2005) Sliding mode control with varying boundary layers for an electro-hydraulic position servo system. Int J Adv Manuf Technol 26:117–123. doi:10.1007/s00170-004-2145-0
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhan, L., Zhou, K. Adaptive fuzzy sliding mode control for a robotic aircraft flexible tooling system. Int J Adv Manuf Technol 69, 1469–1481 (2013). https://doi.org/10.1007/s00170-013-5123-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-013-5123-6