
Abstract
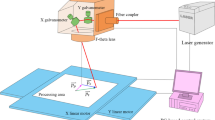
A three-dimensional (3D) laser scanning system is the main part of reverse engineering. It is a comprehensive technological system, including numerical control (NC), a laser, computer-aided design/manufacturing (CAD/CAM), precision mechanisms, computing image sampling, and image processing. Generally, it consists of a motion control system, an image sampling system, and an image processing system, etc. This paper focuses on introducing control principles, hardware constitutions, and software algorithms of the servo motion system, and analyzes and presents the hardware constitutions, software algorithms, and experimental results of the image sampling and processing system in great detail. Finally, the authors come to the conclusion that the errors all occur within the range ±0.1 mm.
Similar content being viewed by others

References
Zhao C, Chen S, Wang C (2004) Research on 3-D laser scanning image processing. The twelfth academic conference thesis of the ISMS, pp 135–138
Missaoui R, Sarifuddin M, Vaillancourt J (2005) Similarity measures for efficient content-based image retrieval. IEE Proc Vis Image Process 152(6):875–887
Ghosh S, Moorthy S (2004) Three dimensional Voronoi cell finite element model for microstructures with ellipsoidal heterogeneities. Comput Mech 34(6):510–531
Dankers A, Zelinsky A (2004) CeDAR: a real-world vision system—mechanism, control and visual processing. Mach Vis Appl 16(1):47–58
Park S-Y, Subbarao M (2005) A multiview 3D modeling system based on stereo vision techniques. Mach Vis Appl 16(3):148–156
Yang J, Al-Rawi M (2005) Illumination invariant recognition of three-dimensional texture in color images. J Comput Sci Technol 20(3):378–388
Tsai RY (1996) An efficient and accurate camera calibration technique for 3D machine vision. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR’96), San Francisco, California, June 1996, pp 364–374
Van De Weijer J, Van Den Boomgaard R (2005) Least squares and robust estimation of local image structure. Int J Comput Vis 64(2–3):143–155
Fedotov NG, Shul’ga LA, Moiseev AV (2005) Pattern recognition theory and preliminary processing of images based on stochastic geometry. Meas Tech 48(8):746–753
Frohn-Schauf C, Henn S, Witsch K (2004) Nonlinear multigrid methods for total variation image denoising. Comput Vis Sci 7(3–4):199–206
Klabjan D (2004) A practical algorithm for computing a subadditive dual function for set partitioning. Comput Optim Appl 29(3):347–368
Harant J, Schiermeyer I (2001) On the independence number of a graph in terms of order and size. Discrete Math 232(1–3):131–138
Graèanin D, Matkovi K, Eltoweissy Mohamed (2005) Software visualization. Innov Syst Softw Eng 1(2):221–230
Chu CW, Jeon GS, Jung SK (2004) A hand-held approach to 3D reconstruction using light stripe projections onto a cube frame. Vis Comput 20(7):506–694
Mäenpää T, Viertola J, Pietikäinen M (2003) Optimising colour and texture features for real-time visual inspection. Pattern Anal Appl 6(3):169–175
Chappuis C, Rassineux A, Breitkopf P, Villon P (2004) Improving surface meshing from discrete data by feature recognition. Eng Comput 20(3):202–209
Favaron O, Redouane Y (2001) Neighborhood unions and regularity in graphs. Theor Comp Sci 263(1–2):247–254
Dunin-Barkowski I, Yang S-H, Kim Y-S, Lee S-R (2005) Error compensation method for a gantry robot and a laser-vision sensor-based chassis module measurement system. Int J Adv Manuf Technol 27(3–4):329–333
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Cheng, JT., Wang, CJ., Zhao, C. et al. Design of a servo motion system and an image sampling and processing system on a 3D laser scanner. Int J Adv Manuf Technol 33, 1143–1148 (2007). https://doi.org/10.1007/s00170-006-0555-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-006-0555-x