
Abstract
The International Data Centre (IDC) in Vienna, Austria, is determining, as part of automatic processing, sensor noise levels for all seismic, hydroacoustic, and infrasound (SHI) stations in the International Monitoring System (IMS) operated by the Provisional Technical Secretariat of the Comprehensive Nuclear-Test-Ban Treaty Organization (CTBTO). Sensor noise is being determined several times per day as a power spectral density (PSD) using the Welch overlapping method. Based on accumulated PSD statistics a probability density function (PDF) is also determined, from which low and high noise curves for each sensor are extracted. Global low and high noise curves as a function of frequency for each of the SHI technologies are determined as the minimum and maximum of the individual station low and high noise curves, respectively, taken over the entire network of contributing stations. An attempt is made to ensure that only correctly calibrated station data contributes to the global noise models by additionally considering various automatic detection statistics. In this paper global low and high noise curves for 2010 are presented for each of the SHI monitoring technologies. Except for a very slight deviation at the microseism peak, the seismic global low noise model returns identically the Peterson (1993) NLNM low noise curve. The global infrasonic low noise model is found to agree with that of Bowman et al. (2005, 2007) but disagrees with the revised results presented in Bowman et al. (2009) by a factor of 2 in the calculation of the PSD. The global hydroacoustic low and high noise curves are found to be in quantitative agreement with Urick’s oceanic ambient noise curves for light to heavy shipping. Whale noise is found to be a feature of the hydroacoustic high noise curves at around 15 and 25 Hz.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Provisional Technical Secretariat for the Preparatory Commission for the Comprehensive Nuclear-Test-Ban Treaty Organization is tasked with establishing the verification regime for the Comprehensive Nuclear-Test-Ban Treaty (CTBT) that, upon Entry Into Force (EIF), bans the detonation of nuclear devices in any environment. The framework of the verification regime is the global network of 337 seismic, hydroacoustic, infrasound, and radionuclide stations that form the International Monitoring System. The International Data Centre processes in near real time data received from the IMS stations, subsequently generating several event bulletins for the benefit of the States Parties that are signatories to the Treaty.
Along with its regular event processing, the IDC is also mandated to record and monitor station ambient noise with the expectation that knowledge of this sort may be indicative of station state of health (SOH).
Station ambient noise conditions are being represented by the power spectral density (PSD), which provides a measure of the power contained in the signal at each frequency.
Determining both single station and network low and high noise models becomes a straightforward procedure when station ambient noise information is routinely accessible. The purpose of this paper is to present the inferred global low and high noise models for each of the SHI technologies based on data recorded by the IMS network. In doing so, care is taken at all stages to ensure both the integrity of the data and the method used to determine the station noise information.
Section 2 of this paper discusses the method used in determining the station ambient noise, as well as tests performed to ensure that the chosen PSD method is providing the correct estimation of the PSD.
Section 3 discusses the data used during the analysis, and section four the results for each of the SHI technologies.
2 Numerical Method and Testing
2.1 Numerical Method
The Welch overlapping method (Welch 1967) forms the basis of the procedure used in this paper to determine the PSD. In this method the time interval spanning the data under consideration is divided into a sequence of overlapping sub-intervals and the PSD for each sub-interval is determined. The average of the sub-interval PSD’s is assumed to provide an estimate of the required PSD. This averaging procedure reduces the variance on the estimated PSD, which may otherwise be of the order of the contributing sample values (Welch 1967). Strictly speaking, the use of the PSD requires that the waveform under consideration be a Wide-Sense Stationary Process (see, e.g., Schreier and Scharf 2010), implying that both the mean and autocorrelation of the sampled waveform are time independent, in which case the PSD is the Fourier transform of the autocorrelation function as asserted by the Wiener–Khinchin theorem. Here we are assuming that stationarity is assumed to hold as the propagating signals are considered to be short-lived transitory phenomenon and will thus provide an only minor impact on the statistics.
When evaluating the PSD’s, careful attention has been given to the spectral windowing process, which is discussed more fully in the Appendix. In this analysis we have chosen to use the nutall4a window of Heinzel et al. (2002), which is a good general purpose spectral window with spectral leakage properties superior to that of the Hanning or Hamming windows.
The PSD estimate used in this paper is given by the expression \( P_{\text{SD}} (\omega_{j} ) = \frac{{2\left| {F(\omega_{j} )} \right|^{2} }}{{\Updelta I_{W} }} \)—where \( \omega_{j} = \frac{2\pi j}{n\Updelta } \) for \( j = 0, \ldots ,n/2 \) is the jth frequency picket, n is the number of samples, \({\Updelta}\) is the sample rate, F is the output of a unitary Fourier Transform algorithm and I w the sum of the squares of the spectral window coefficients. This expression is discussed further in the Appendix and derived more fully in references like Harris (1978), and Heinzel et al. (2002).
2.2 Testing
Two levels of testing have been applied to the algorithm described in Sect. 2.1. The first is against an artificial dataset intended to mimic digitizer noise for which the PSD has a theoretically determinable expression. The second is a blind test with a second algorithm on an otherwise random selected data set.
2.2.1 Test 1: Digitizer Noise
The procedure described in Heinzel et al. (2002) has been used to test the algorithm. Here, each sample in a synthetic time-series data set has been rounded to multiples of a parameter U 0 defined a priori, which represents the least-significant-bit of a digitizer. In this case, the PSD has a noise-floor that is given by the expression (see, e.g., Lyons 1997) \( U^{2} \left( \omega \right) = \frac{{U_{0}^{2} }}{6\Updelta } \), where ω is angular frequency.
The following strategy outlined in Heinzel et al., (2002) was used to generate the synthetic time-series data set:
-
1.
The double-sinusoid \( u\left( t \right) = A_{1} \sin \left( {2\pi f_{1} t} \right) + A_{2} \sin \left( {2\pi f_{2} t} \right) \) is used to provide the basic analogue signal. Here, f 1 = 0.3123456 Hz, f 2 = 2.0 Hz, A 1 = 2.123456, A 2 = 1.0 is used.
-
2.
\( u\left( t \right) \) has been sampled at 20 Hz to provide the time-series: \( u_{j} = A_{1} \sin \left( {\frac{{2\pi f_{1} j}}{\Updelta }} \right) + A_{2} \sin \left( {\frac{{2\pi f_{2} j}}{\Updelta }} \right) \) for \( j = 1, \ldots ,N. \)
-
3.
The new time-series \( y_{j} \)for \( j = 1, \ldots ,N \) is formed, where \( y_{j} = \text{int} \left[ {\frac{{u_{j} }}{{U_{0} }} + 0.5} \right]U_{0}. \)
-
4.
With the values for \( A_{1} ,\,A_{2} ,\,f_{1} ,\,f_{2} ,\,U_{0,} \) and \( \Updelta \) as given above we should expect a white noise background with \( \log_{10} {\text{PSD}} = \log_{10} \left( {\frac{{U_{0} }}{6\Updelta }} \right) = - 8.079. \)
With this procedure a time-series with duration 1-h was generated. After passing the algorithm as described above over the synthetic data set, the PSD as shown in Fig. 1 was obtained.

Power spectral density as a function of frequency for the Test 1 data set
The desired noise floor is accurately rendered, and further, when multiplying by the Equivalent Noise Bandwidth for the nutall4a window (see the Appendix), the amplitude of the spectral peaks is accurately determined, as is shown in Fig. 1.
2.2.2 Test 2: Blind Test with a Second Independent PSD Algorithm
One-hour data segments were chosen randomly from the list of infrasound stations provided in Table 1. A completely independent second algorithm that uses the matlab pwelch function (Matlab 2008) to estimate PSD’s (denoted as BGR in what follows) was provided by one of the authors and compared with the algorithm described above (denoted CTBTO in what follows). The results are shown in Fig. 2 and indicate excellent agreement.

Results of a blind-comparison test between two different PSD algorithms on randomly chosen infrasound data. Abscissa values are frequency in Hz, and ordinate values are logarithm base 10 of the PSD in Pa2 per Hz. The CTBTO data refer to results generated by the procedure discussed in this Paper. The BGR data refers to a second independent algorithm provided by one of the present authors
We conclude from these two tests that the algorithm is functioning, as it should.
3 The Data
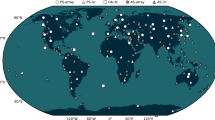
The IMS seismic, hydroacoustic and infrasound stations that were used in the current analysis are listed in Table 1; the locations of the stations is shown in Fig. 3.


a Location of the primary seismic stations that contributed to the present analysis. b Location of the auxiliary seismic stations that contributed to the present analysis. c Location of the primary infrasound stations that contributed to the present analysis. d Location of the primary hydroacoustic stations that contributed to the present analysis. Note that no T-stations were used in this component of the present analysis
Both primary and auxiliary seismic stations were used in this analysis, and although data from the primary stations is continuously recorded, the auxiliary stations generally send data upon request in order to refine knowledge of a seismic event during the analysis stage. Data from the auxiliary seismic stations may therefore not be present for the entire analysis period.
Data sampled four times per day for the whole of 2010 were used in the current analysis except in situations where better resolution of the low or high noise models was required for a particular station where the data was sampled each hour for the entire year.
Each sampling consisted of 1-h of waveform data divided into 3-min overlapping segments as outlined above, with the seismic data being deconvolved to acceleration and the infrasound and hydroacoustic data deconvolved to displacement, the instrument response has been removed in each case. Note that in the case of the infrasound data only the response of the sensor and digitizer has been removed, not that of the spatial filter system that was likely to be present.
4 Low and High Noise Models
Probability Density Functions using the procedure discussed by McNamara and Buland (2004) are determined for each SHI sensor. Data displayed in this format allows a ready estimate of the sensor low and high noise models for the period in which data was contributed. As an example, Fig. 4 shows the PDF obtained for sensor I02AR/I02H1 for the year 2010. The low and high noise curves as a function of frequency are determined by plotting the PDF function at the 5 and 95 % probability levels, respectively. The global low noise curve as a function of frequency is defined to be, for a given frequency, the minimum of the low noise curves from all contributing sensors across all stations at the given frequency. Only stations with sufficient contributing data such that a well-defined PDF is formed with well-behaved low and high noise curves were used in the analysis.

The PDF obtained for sensor I02AR/I02H1 for the year 2010. The low and high noise curves as shown in red are determined by plotting the PDF function at the 5 and 95 % probability levels, respectively
4.1 Seismic
A random shift of up to 6 h is applied to the requested processing time for the seismic data in order to reduce the likelihood of contamination by regular cultural noise. Only vertical channels were considered when performing the seismic analysis, and, in the case of short-period seismic sensors, only spectral data at frequencies higher than 0.1 Hz were allowed to contribute to the analysis.
Event bulletins can be used as an additional measure to ensure that correctly calibrated data are contributing to the seismic low and high noise models. Event mb and Ms magnitude residuals (i.e., network magnitude estimate minus the station magnitude estimate) were plotted as a function of time for each station for the time duration under consideration and a station allowed to contribute to the global noise models if the Ms and mb magnitude residuals were less than 0.3 magnitude units. An example of a station with data that is correctly calibrated and unlikely to bias the global noise models is shown in Fig. 5. An example of a station with data that may have a calibration error and could bias the global noise models if used is shown in Fig. 6.

Event mb magnitude residual as a function of time for station WRA during 2010. No bias exists in the magnitude estimate suggesting the calibration for this station is correct

Event mb magnitude residual as a function of time for station CFAA during 2010. A clear bias of around −0.7 magnitude units exists for this station suggests a calibration error. The red line is the line of best fit through the data
The IDC global seismic low and high noise curves for 2010, referred to here as IDC2010_LS and IDC2010_HS, respectively, are shown in Fig. 7. Also shown for comparison are the NLNM and NHNM curves from Peterson (1993). The IDC2010_LS and NLNM curves are in good agreement, particularly in the low noise case. The microseism peak is slightly lower in the case of the IDC2010_LS model; station AAK (Ala Archa, Kyrgyzstan) was found to be largely responsible for this slight deviation. In order to better resolve the contribution of this station to the low noise curve, data for the entire year, i.e., every hour in the day, for station AAK was processed.

The global seismic low noise model IDC2010_LS and high noise model IDC2010_HS (solid lines) compared with the NHNM and NLNM of Peterson (1993) (dashed lines)
Fairly good agreement exists between IDC2010_HS and the NHNM. The microseismic peak is slightly elevated in the IDC2010_HS model compared to the NHNM model, which is found to be due largely to station BORG (Borgarfjordur, Asbjarnarstadir, Iceland). This station commenced operation in 1994, so it would not have contributed to the Peterson (1993) analysis. Waveform data for stations BORG was computed each hour for the entire year to better resolve its contribution to the IDC2010_HS model.
4.2 Hydroacoustic
Once again a random time shift of up to 6 h is applied to the requested processing time in order to reduce contamination from regular cultural noise.
The IDC global hydroacoustic low and high noise curves for 2010, referred to here as IDC2010_LH and IDC2010_HH, respectively, are shown in Fig. 8. Stations that contributed to these curves are shown in Fig. 3d. No T-stations were used during this analysis, so only in-water hydroacoustic signals contributed to the global noise curves. The low and high noise curves differ by a constant 20 dB from 0.01 Hz to around 6 Hz where the low noise curve begins to register shipping noise, making the curve relatively flat out to around 100 Hz. The microseismic peak at around 5 s period is clearly visible in both curves. It is worth noting that the microseismic energy is being measured directly in the water, which means that it is a more local measurement of surface wave activity than for seismic stations that receive microseism energy from a large area of ocean after propagating through the crust. This explains why the low noise and high noise curves exhibit the same microseismic deviation. Also shown in Fig. 8 for comparison are the oceanic ambient noise curves presented in Urick (1984) for light to heavy shipping. Good quantitative agreement is observed to exist between these two sets of curves. The features in the high noise curve at around 15 and 25 Hz are likely to be due to blue and fin whale calling (see, e.g., McCauley et al., 2001; Richardson et al. 1995).

The global hydroacoustic low noise model IDC2010_LH and high noise model IDC2010_HH (solid curves) with Urick’s noise curves superimposed (Urick 1984) for light, moderate and heavy shipping (dashed curves). Note that the wind component in the Urick curves was assumed to be zero, as the contribution due to the wind is not particularly significant below 100 Hz
4.3 Infrasonic
Infrasound data is requested at the local time: 03:30–04:30, 09:30–10:30, 15:30–16:30 and 21:30–22:30 at each recording station in order to sample the coldest part of the night (~4 am) and warmest part of the day (~4 pm), although it is appreciated these times may become a fairly inaccurate approximation for stations with extreme latitudes.
During the formulation of these noise curves station IS23, located at Kerguelen, was dropped from the high noise analysis as strong resonance peaks generated by the spatial filters significantly elevated the Power Spectral Densities at high frequencies, and would lead to a bias in the global high noise model.
The IDC global infrasonic low and high noise curves for 2010, referred to here as IDC2010_LI and IDC2010_HI, respectively, are shown in Fig. 9. Also shown in Fig. 9 are the global low and high infrasonic noise curves reported by Bowman et al. (2009) that have been scaled by two in the PSD’s and can be assumed to be representative of the 2005/2007 results, since Bowman et al. (2009) state their 2009 results differ from the earlier 2005/2007 results by a factor of two, the latter results being half of the earlier results. The revised noise curves presented in Bowman et al. (2009) are shown in Fig. 10. Inspection shows that the Bowman (2005, 2007) low noise curves and IDC2010_LI curve are in close agreement around the microbarom peak. The IDC2010_LI curve drops below the Bowman curve at higher frequencies. This is due to the inclusion of station IS55 in the IDC2010_LI curve where it was excluded from the Bowman analysis. Station IS55, located at Windless Bight in the Antarctic, employs sensors manufactured by Chaparral Physics that are known to have very low self-noise at high frequencies. This station was excluded in the Bowman analysis because the authors felt that snow covering the spatial filters may artificially lower the recorded noise levels. However, it was included in this analysis as it is thought that the Chaparral sensors make an important contribution to the high frequency end of the noise curves that would otherwise be ignored. It is felt here that the curve obtained with the IS55 sensors included would more likely be closer to reality than those obtained leaving them out. The revised noise curves presented in Bowman et al. (2009) shown in Fig. 10 are consistently out in the value of the PSD’s by a factor of 2, suggesting from this analysis that the original analysis of Bowman et al. (2005, 2007) is correct and a systematic error was introduced in the more recent work.


The global infrasonic low noise model IDC2010_LI and high noise model IDC2010_HI (solid lines) compared with those of Bowman (2009) (dashed lines)
5 Conclusions
Data recorded in 2010 from the CTBTO IMS seismic, hydroacoustic and infrasound networks has been used to infer global low and high ambient noise curves.
The determined seismic global low and high noise curves are found to be in excellent agreement with those established by Peterson (1993), whereas the global infrasound low and high noise curves are found to be in general agreement with the Bowman (2005, 2007) models, but disagree with the revised models presented in Bowman (2009), which seem to have a factor of 2 error in the determination of the PSD. The hydroacoustic global low and high noise curves both exhibit contributions from the microseisms at low frequencies and shipping noise at high frequencies. Whale noise is a feature of the high noise curve at 15 and 25 Hz.
References
Bowman, J.R., Baker, G.E., and Bahavar, M, 2005. Ambient infrasound noise. Geophys Res. Lett. 32. L09803, doi:10.1029/2005GL022486.
Bowman, J.R., Shields, G., O’Brien, M.S. 2007. Infrasound Station Ambient Noise Estimates and Models 2003–2006 Infrasound Technology Workshop, Tokyo, 13–16, November 2007.
Bowman, J.R., Shields, G., O’Brien, M.S. 2009. Infrasound station ambient noise estimates and models 2003–2006 (Erratum), Infrasound Technology Workshop, Brasilia, Brazil, November 2–6, 2009.
Harris, F.J.,1978. On the use of Windows for Harmonic Analysis with the Discrete Fourier Transform. Proceedings of the IEEE 66 (1): 51–83. doi:10.1109/PROC.1978.10837.
Heinzel G., Rudiger, R., and Schilling R. 2002. Spectrum and spectral density estimation by the Discrete Fourier Transform (DFT), including a comprehensive list of window functions and some new flat-top windows. http://www.rssd.esa.int/SP/LISAPATHFINDER/docs/Data_Analysis/GH_FFT.pdf.
Lyons, R.G., 1997. “Understanding Digital Signal Processing”, Addison-Wesley.
MATLAB, 2008. MATLAB version 7.7.0. Natick, Massachusetts: The MathWorks Inc.
McNamara, D.E. and R.P. Buland, 2004. Ambient Noise Levels in the Continental United States, Bull. Seism. Soc. Am., 94, 4, 1517–1527.
McCauley, R.D., Jenner C., Bannister J.L., Burton C.L.K, Cato, D.H., and Duncan., A. 2001. Blue whale calling in the Rottnest trench—2000, Western Australia. Prepared for Environment Australia, from Centre for Marine Science and Technology, Curtin University, R2001–6, 55 pp.
Peterson, J., 1993. Observation and modeling of seismic background noise, U.S. Geol. Surv. Tech. Rept., 93–322, 1–95.
Richardson, W.J., Greene, C.R., Malme, C.I, and Thomson, D.H. 1995. Marine Mamals and Noise, Academic Press, San Diego. pp 576.
Schreier, P.J, and Scharf, L.L, 2010. Statistical signal processing of complex-valued data: the theory of improper and noncircular signals. Cambridge University Press. pp. 330.
Urick, R.J. 1984. Ambient noise in the sea. Report No. 20070117128. Undersea Warefare Technology Office, Naval Sea Systems Command, Department Of The Navy, Washington DC.
Welch, PD, 1967. The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging Over Short, Modified Periodograms, IEEE Transactions on Audio Electroacoustics, Volume AU-15 pp. 70–73.
Acknowledgments
The authors would like to thank Dr. Roger Bowman for providing copies of his infrasound global noise models.
Disclaimer
The views expressed in this paper are those of the authors and do not necessarily reflect those of the Preparatory Commission.
Open Access
This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
Author information
Authors and Affiliations
Corresponding author
Appendix: Estimation of the Power Spectral Density
Appendix: Estimation of the Power Spectral Density
The selection of a finite-time interval of digitally sampled data, with supposedly constant sample rate, is equivalent to taking the analogue signal and applying two processes:
-
1.
Sampling using the periodic Dirac Comb function \( D(t) = \sum\nolimits_{k = - \infty }^{\infty } {\delta (} t - kT), \) where T is the sampling period
-
2.
Windowing using the box-car window function \( w(t) = \left\{ {\begin{array}{*{20}c} 1 & {{\text{when }}0 \le t \le KT} \\ 0 & {\text{otherwise}} \\ \end{array} } \right. \) , where it is assumed that time zero is at the beginning of the box-car function, which is of duration KT.
The Fourier transform now becomes:
where asterisk (*) indicates the convolution function, and the capitals indicate Fourier Transformation, and \( D(\omega ) = \sum\nolimits_{k = - \infty }^{\infty } {\delta (} \omega - k\frac{2\pi }{T}) = \sum\nolimits_{k = - \infty }^{\infty } {\delta (} \omega - \omega_{k} ) \). The Fourier transform of the window function is seen to control the measured frequency content. Examples for several spectral windows are shown in Fig. 11. The phenomenon of ‘spectral leakage’ is clearly visible in this figure, where energy due to the non-periodic nature of the windowing process is migrated to higher-frequencies. In order to reduce the contribution of spectral leakage to the measured frequency content, it is common practice to taper the window function w, such that the side-lobes are smaller, invariably at the expense of losing some frequency resolution, but generally at the gain in amplitude resolution. Careful comparison of the properties of a large number of window functions is given in Heinzel et al. (2002), where the different windows are classified according to their ability to either resolve frequencies, as in the box-car window (Fig. 11a), resolve amplitudes, such as the flat-top windows (Fig. 11c), or be general purpose with some capability in both areas, such as the nutall windows (Fig. 11b). In this work we use the nutall4a window function of Heinzel et al. (2002) whose transform is displayed in Fig. 11b. This is a general-purpose window that has good amplitude and frequency resolution with side lobes that are around 100 dB below the main lobe. Note that it has become common practice in the literature to apply a fractionally tapered window to waveform data, so that, for example, only the first and last 10 % of the window function differs from unity. This can lead to significantly degraded behaviour and should be avoided. Figure 12 shows the window transform function for a window function that consists of a hanning taper applied to the first and last 10 % of the data.

Transform of three spectral windows: a rectangular; b nutall4a; c HFD248D. See Heinzel et al. (2002) for a discussion on these last two windows

Transform of window function with a Hanning taper applied to the outer 10 % of the window and with the inner 80 % of the window function set to unity (upper curve). The transform of the usual Hanning window is also shown for comparison (lower curve)
Several additional concepts are important when considering the use of window functions as applied to the determination of Power Spectral Densities. The first of these is the notion of Incoherent Power Gain. The spatially-extended nature of the main lobe of the window transform function, generally extending across several frequency bins, allows the window to gather energy from those neighbouring bins. Harris (1978) shows that if N 0 is the noise-power per bin, then the total power P w collected by the window function is \( P_{W} = \frac{{N_{0} }}{2\pi }\int\nolimits_{{{\raise0.7ex\hbox{${ - \pi }$} \!\mathord{\left/ {\vphantom {{ - \pi } \Updelta }}\right.\kern-\nulldelimiterspace} \!\lower0.7ex\hbox{$\Updelta $}}}}^{{{\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi \Updelta }}\right.\kern-\nulldelimiterspace} \!\lower0.7ex\hbox{$\Updelta $}}}} {\left| {W\left( \omega \right)} \right|^{2} } d\omega = \frac{{N_{0} }}{\Updelta }\sum\nolimits_{j = 0}^{n - 1} {w_{j}^{2} } \equiv \frac{{N_{0} }}{\Updelta }I_{W} \)—where n is the number of samples, \( \Updelta \) is the sample rate, and \( I_{W} \), which just is the sum of the squares of the window coefficients, is defined to be the Incoherent Power Gain of the window. We are therefore in a position to write an expression for the PSD of the finite-length digitally-sampled analogue signal \( f(t) \). It is: \( P_{\text{SD}} (\omega_{j} ) = \frac{{2\left| {F(\omega_{j} )} \right|^{2} }}{{\Updelta I_{W} }} \)—where \( \omega_{j} = \frac{2\pi j}{n\Updelta } \) for \( j = 0, \ldots ,n/2 \), is the jth frequency picket, and F is the output of a unitary Fourier Transform algorithm. Here, we are taking into account the contribution of the negative frequencies with the factor 2. It is important to note that P is the power spectrum contained in each frequency bin, i.e., PSD, and not the power spectrum of an individual spectral component. To determine the power contained in an individual line spectra the concept of the Coherent Power Gain is useful. Application of Eq. (1) to the elemental waveform \( f(t) = Ae^{{i\omega_{k} t}} \) yields the result.
\( F(f(t)D(t)w(t)) = A\sum\nolimits_{j = - \infty }^{\infty } {w_{j} } \delta ( {\omega - \omega_{k} } ) * \delta ( {\omega - \omega_{j} }) = A\sum\nolimits_{j = - \infty }^{\infty } {w_{j} } \), where \( w_{j}, \) are the values of the window function at times: \( t + jT \) for \( j = - \infty , \ldots ,\infty \). In such a case, the Power Spectrum is given by \( P_{S} (\omega_{j} ) = \frac{{2\left| {F(\omega_{j} )} \right|^{2} }}{{C_{W} }} \), where \( C_{W} \), which is the square of the sum of the window coefficients, is the Coherent Power Gain of the window. One can then estimate the amplitude of the line spectra by taking the square root of \( P_{S} (\omega_{j} ) \). The quantity β is known as the Equivalent Noise Bandwidth of the Window function and through straightforward multiplication allows one to convert PSD to PS and vice versa.
The Recommended Overlap Value (ROV) for the nutall4a window is 68 % (Heinzel et al., 2002), implying a total of 63 three-min segments to be evaluated.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Brown, D., Ceranna, L., Prior, M. et al. The IDC Seismic, Hydroacoustic and Infrasound Global Low and High Noise Models. Pure Appl. Geophys. 171, 361–375 (2014). https://doi.org/10.1007/s00024-012-0573-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-012-0573-6