
Abstract
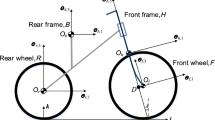
In this paper we present the linearized equations of motion for a bicycle as, a benchmark The results obtained by pencil-and-paper and two programs are compaied The bicycle model we consider here consists of four rigid bodies, viz a rear frame, a front frame being the front fork and handlebar assembly, a rear wheel and a fiont wheel, which are connected by revolute joints The contact between the knife-edge wheels and the flat level surface is modelled by holonomic constiaints in the normal direction and by non-holonomic constraints in the longitudinal and lateral direction The rider is rigidly attached to the rear frame with hands free from the handlebar This system has three degrees of freedom, the roll, the steer, and the forward speed For the benchmark we consider the linearized equations for small perturbations of the upright steady forward motion The entries of the matrices of these equations form the basis for comparison Three diffrent kinds of methods to obtain the results are compared pencil-and-paper, the numeric multibody dynamics program SPACAR, and the symbolic software system AutoSim Because the results of the three methods are the same within the machine round-off error, we assume that the results are correct and can be used as a bicycle dynamics benchmark
Similar content being viewed by others


References
Besscling, J F, 1964, “The Complete Analogy Between the Matrix Equations and the Continuous Field Equations of Stiuctural Analysis,” inInternational Symposium on Analogue and Digital Techniques Applied to Aeronautics Proceedings, Presses Académiques E.uropéennes, Bruxelles, pp 223–242
Caivallo, M E, 1901, “Théorie du mouvement du Monocycle et de la Bicyclette,”Journal de L’Ecole Polytechnique, Series 2, Part 1, Volume 5, “Cerceau et Monocyle,” 1900 pp 119–188, Part 2, Volume 6, “Théorie de la Bicyclette,” pp 1–118
Den Hartog, J P, 1948,Mechanics, McGraw-Hill, New York and London
Dohring, E, 1955, “Stability of Single-Track Vehicles,” (Translated by J Lotsof, March 1957) Technical leport, Institut für Fahrzeugtechnik, Technische Hochschule Biaunschweig, Forschung Ing-Wes 21(2), pp 50–62
Hand, R S, 1988,Comparisons and Stability Analysis of Linearized Equations of Motion for a Basic Bicycle Model, MSc Thesis, Cornell Univ ersity
Jonker, J B, 1988, A Finite Element Dynamic Analysis of Flexible Spatial Mechanisms and Manipulators, PhD Thesis, Delft University Press, Delft
Jonker, J B and Meijaard, J P, 1990, “SPACAR — Computer Program for Dynamic Anaysis of Flexible Spatial Mechanisms and Manipulator,” inMultibody Systems Handbook, W Schiehlen (ed), Springer-Verlag, Berlin, pp 123–143
Kane, T R, 1968,Dynamics, Holt, Rmehart and Winston, New York
Kane, T R, 1975, “Fundamental Kinematic Relationships for Single-Track Vehicles,”International Journal for Mechanical Sciences 17, pp 499–504
Klein, F, and Sommerfeld, A, 1897,Über die Theorie des Kreisels, (Chapter IX, Section 8, “Stabilitat des Fahrrads,” 1910, pp 863–884), Teubner, Leipzig
Meijaaid, J P, 1991, “Direct Determination of Periodic Solutions of the Dynamical Equations of Flexible Mechanisms and Manipulators,”International Journal for Numerical Methods in Engineering, 32, pp 1691–1710
Neimaik, Ju I and Fufaev, N A, 1972,Dynamics of Nonholonomic Systems, (Translated from the Russian edition, Nauka, Moscow, 1967), A M S, Providence RI
Papadopoulos, J M, 1987, “Bicycle Steering Dynamics and Self-Stability. a Summary Report on Work in Progress,”Technical report, Cornell Bicycle Research Project, pp 1–23 (availabe at http //tam Cornell edu/ruina/hplab/bicycles html)
Rankine, W J M, 1869, “On the Dynamical Principles of the Motion of Velocipedes,”The Engineer, 28, pp 79, 129, 153, 175
Society of Automotive Engineers, 2001, “Vehicle Dynamics Terminology-SAE J670e,” 2007SAE Handbook, SAE international, Wanendale, PA
Sayers, M W, 1991, “Symbolic Computer Language for Multibody Systems,”Journal of Guidance, Control, and Dynamics, 14, pp 1153–1163
Sayers, M W, 1991, “Symbolic Vector/Dyadic Multibody Formalism for Tree-Topology Systems,”Journal of Guidance, Control and Dynamics, 14, pp 1240–1250
Schwab, A L and Meijaard, J P, 2003, “Dynamics of Flexible Multibody Systems with Non-Holonomic Constraints A Finite Element Approach,”Multibody System Dynamics 10, pp 107–123
Schwab, A L, 2002,Dynamics of Flexible Multibody Systems, Ph D Thesis, Delft University of Technology, Delft
Schwab, A L and Merjaard, J P, 1999, “The Belt, Gear, Bearing and Hinge as Special Finite Elements for Kinematic and Dynamic Analysis of Mechanisms and Machines,” in Lemonen, T (ed),Proceedings of the Tenth World Congress on the Theory of Machines and Mechanisms, IFToMM, June 20–24, 1999, Oulu, Finland, Oulu University Press, Vol 4, pp 1375–1386
Schwab, A L and Meijaard, J P, 1999, “Dynamics of Flexible Multibody Systems having Rolling Contact Application of the Wheel Element to the Dynamics of Road Vehicles,”Vehicle System Dynamics Supplement 33, pp 338–349
Sharp, R S, 1971, “The Stability and Control of Motorcycles,”Journal of Mechanical Engineering Science, 13(5), pp 316–329
Steele, G L, Jr, 1990 Common Lisp, The Language, 2nd ed, Digital Press, USA.
Timoshenko, S and Young, D H, 1948, Advanced Dynamics, McGraw-Hill Book Company, New York
Van Der Werff, K., 1977,Kinematic and Dynamic Analysis of Mechanisms, a Finite Element Approach. Ph D Thesis, Delft University Press, Delft
Weir, D H, 1972,Motorcycle Handling Dynamics and Rider Control and the Effect of Design Configuration on Response and Performance, Ph D Thesis, University of California, LA
Weir, D H and Zellner, J W, 1978, “Lateral-Dnectional Motorcycle Dynamics and Rider Control,” Technical report 780304, Society of Automotive Engineers, Warrendale, PA
Whipple, F J W, 1899, “The Stability of the Motion of a Bicycle,”The Quarterly Journal of Pure and Applied Mathematics 30, pp 312–348
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Schwab, A.L., Meijaard, J.P. & Papadopoulos, J.M. Benchmark results on the linearized equations of motion of an uncontrolled bicycle. J Mech Sci Technol 19 (Suppl 1), 292–304 (2005). https://doi.org/10.1007/BF02916147
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF02916147