
Abstract
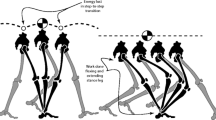
The focus of this paper is to examine the contributions of active and passive forces in the control of limb trajectory over obstacles during locomotion. Kintetic analyses of the swing phase of locomotion were carried out to determine the power profiles at various joints and to parcel the joint moments into moments due to muscle action, gravitational force and motion-dependent terms. The analyses revealed that toe elevation over the obstacles was achieved primarily by flexing at the hip, knee and ankle joint. Power analyses showed that translational energy applied at the hip joint and rotational energy applied at the knee joint were modulated as functions of obstacle height. This demonstrates that increased hip and ankle joint flexion are achieved not through active muscle action but rather through passive forces induced by translational action at the hip (representing contribution by the stance limb muscles) and rotational action at the knee joint. Parcelling the joint moment terms into various components clearly shows how the nervous system exploits intersegmental dynamics to simplify control of limb elevation over obstacles and minimize energy costs.
Similar content being viewed by others

References
Bernstein N (1967) The co-ordination and regulation of movements. Pergamon, Oxford
Feldman AG (1986) Once more for the equilibrium point hypothesis (λ model). J Mot Behav 18:17–54
Hoy MG, Zernicke RF (1986) The role of intersegmental dynamics during rapid limb oscillations. J Biomech 19:867–877
McFadyen BJ, Winter DA (1991) Anticipatory locomotor adjustments during obstructed human walking. Neurosci Res Commun 9(l):37–44
McGeer T (1990) Passive dynamic walking. Int J Robotics Res 9(2):62–82
Mena D, Mansour JM, Simon SR (1981) Analysis and synthesis of human swing leg motion during gait and its clinical applications. J Biomech 14:823–832
Mochon S, McMahon TA (1980) Ballistic walking. J Biomech 13:49–57
Mochon S, McMahon TA (1981) Ballistic walking: an improved model. J Math Biosci 52:241–260
Patla AE, Prentice SD, Robinson C, Neufeld J (1991) Visual control of locomotion: strategies for changing direction and going over obstacles. J Exp Psychol Hum Percept Perform 17(3):603–634
Patla AE, Rietdyk S (1993) Visual control of limb trajectory over obstacles during locomotion: effect of obstacle height and width. Gait Posture 1(1):45–60
Patla AE, Prentice SD, Armand M, Huissoon JP (1994) The role of effector system dynamics on the control of limb trajectory over obstacles during locomotion: empirical and modelling approaches. In: Taguchi K, Igarashi M, Mon S (eds) Vestibular and neural front. (XIIth International Symposium on Posture and Gait). Elsevier Science, Amsterdam, pp 333–336
Smith JL, Zernicke RF (1987) Predictors for neural control based on limb dynamics. Trends Neurosci 10(3):123–128
Smith JL, Chung SH, Zernicke RF (1993) Gait-related motor patterns and hindlimb kinetics for the cat trot and gallop. Exp Brain Res 94:308–322
Wisleder D, Zernicke RF, Smith JL (1990) Speed-related effects on intersegmental dynamics during the swing phase of cat locomotion. Exp Brain Res 79:651–660
Winter DA (1991) The biomechanics and motor control of human gait: normal, elderly, and pathological, 2nd edn. University of Waterloo, Waterloo, Ontario, Canada
Young RP, Scott SH, Loeb GE (1992) An intrinsic mechanism to stablise posture: joint-angle-dependent moment arms of the feline ankle muscles. Neurosci Lett 145:137–140
Zajac FE, Gordon ME (1989) Determining muscle's force and action in multiarticular movement. Exerc Sport Sci Rev 17:187–230
Zernicke RF, Schneider K, Buford JA (1991) Intersegmental dyamics during gait: implications for control. In: Patla AE (ed) Adaptability of human gait. Elsevier Science, Amsterdam pp 187–202
Zijlstra W, Rutgers AWF, Hof AL, Weerden TW van (1995) Voluntary and involuntary adaptation of walking to temporal and spatial constraints. Gait Posture 3(1):13–18
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Patla, A.E., Prentice, S.D. The role of active forces and intersegmental dynamics in the control of limb trajectory over obstacles during locomotion in humans. Exp Brain Res 106, 499–504 (1995). https://doi.org/10.1007/BF00231074
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/BF00231074