
Abstract
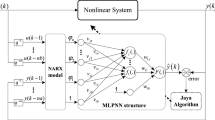
In order to obtain good control performance of ultrasonic motors in real applications, a study on the learning in intelligent control using neural networks (NN) based on differential evolution (DE) is reported in this chapter. To overcome the problems of characteristic variation and nonlinearity, an intelligent PID controller combined with DE type NN is studied. In the proposed method, an NN controller is designed for estimating the variation of PID gains, adjusting the control performance in PID controller to minimize the error. The learning of NN is implemented by DE in the update of the NN’s weights. By employing the proposed method, the characteristic changes and nonlinearity of USM can be compensated effectively. The effectiveness of the method is confirmed by experimental results.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Tsoukalas, L.H., Uhrig, R.E.: Fuzzy and Neural Approaches in Engineering. Wiley, New York (1997)
Srinivas, M., Patnaik, L.M.: Genetic algorithms: a survey. Computer 27(6), 17–26 (1994)
Wang, L.: A hybrid genetic algorithm – neural network strategy for simulation optimization. Appl. Math. Comput. 170(2), 1329–1343 (2005)
Senjyu, T., Miyazato, H., Uezato, K.: Position control of ultrasonic motor using neural network (Japanese). Trans. Inst. Electr. Eng. Jpn. D 116, 1059–1066 (1996)
Oka, M., Tanaka, K., Uchibori, A., Naganawa, A., Morioka, H., Wakasa, Y.: Precise position control of the ultrasonic motor using the speed compensation type NN controller (Japanese). J. Jpn. Soc. Appl. Electromagn. Mech. (JSAEM) 70(6), 1715–1721 (2004)
Mu, S., Kanya, T.: , Intelligent IMC-PID control using PSO for ultrasonic motor. Int. J. Eng. Innov. Manag. 1(1), 69–76 (2011)
Mu, S., Tanaka, K., Nakashima, S., Alrijadjis, D.: Real-time PID controller using neural network combined with PSO for ultrasonic motor. ICIC Exp. Lett. 8(11), 2993–2999 (2014)
Jordehi, A.R., Jasni, J.: Particle swarm optimisation for discrete optimisation problems: a review. Artif. Intell. Rev. 43, 243–258 (2015)
Das, S., Abraham, A., Konar, A.: Particle swarm optimization and differential evolution algorithms: technical analysis, applications and hybridization perspectives. Stud. Comput. Intell. 116, 1–38 (2008)
Ilonen, J., Kamarainen, J., Lampinena, J.: Differential evolution training algorithm for feed-forward neural networks. Neural Process. Lett. 17, 93–105 (2003)
C. Zhao, Ultrasonic Motor - Technologies and Applications. Science Press/Springer Beijing/Berlin (2011)
Basheer, I.A., Hajmeer, M.: Artificial neural networks: fundamentals, computing, design, and application. J. Microbiol. Methods 43, 3–31 (2000)
Islam, S.M., Das, S., Ghosh, S., Roy, S., Suganthan, P.N.: An adaptive differential evolution algorithm with novel mutation and crossover strategies for global numerical optimization. IEEE Trans. Syst. Man Cybern. B (Cybernetics) 42(2), 482–500 (2012)
Tanaka, K., Kodani, K., Oka, M., Nishimura, Y., Farida, F.A., Mu, S.: Meal assistance robot with ultrasonic motors. Int. J. AEM 36, 177–181 (2011)
Zhou, C., Wang, X., Li, Z., Tsagarakis, N.: Overview of gait synthesis for the humanoid COMAN. J. Bionic Eng. 14(1), 15–25 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Mu, S., Shibata, S., Lu, H., Yamamoto, T., Nakashima, S., Tanaka, K. (2022). Study on the Learning in Intelligent Control Using Neural Networks Based on Back-Propagation and Differential Evolution. In: Mu, S., Yujie, L., Lu, H. (eds) 4th EAI International Conference on Robotic Sensor Networks. EAI/Springer Innovations in Communication and Computing. Springer, Cham. https://doi.org/10.1007/978-3-030-70451-3_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-70451-3_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-70450-6
Online ISBN: 978-3-030-70451-3
eBook Packages: EngineeringEngineering (R0)