
Abstract
Recent studies have shown that deep neural networks can significantly improve the quality of single-image super-resolution. Current researches tend to use deeper convolutional neural networks to enhance performance. However, blindly increasing the depth of the network cannot ameliorate the network effectively. Worse still, with the depth of the network increases, more problems occurred in the training process and more training tricks are needed. In this paper, we propose a novel multi-scale residual network (MSRN) to fully exploit the image features, which outperform most of the state-of-the-art methods. Based on the residual block, we introduce convolution kernels of different sizes to adaptively detect the image features in different scales. Meanwhile, we let these features interact with each other to get the most efficacious image information, we call this structure Multi-scale Residual Block (MSRB). Furthermore, the outputs of each MSRB are used as the hierarchical features for global feature fusion. Finally, all these features are sent to the reconstruction module for recovering the high-quality image.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Image super-resolution (SR), particularly single-image super-resolution (SISR), has attracted more and more attention in academia and industry. SISR aims to reconstruct a high-resolution (HR) image from a low-resolution (LR) image which is an ill-posed problem since the mapping between LR and HR has multiple solutions. Thence, learning methods are widely used to learn a mapping from LR to HR images via applying large image datasets.
Currently, convolutional neural networks (CNNs) have indicated that they can provide remarkable performance in the SISR problem. In 2014, Dong et al. proposed a model for SISR problem termed SRCNN [1], which was the first successful model adopting CNNs to SR problem. SRCNN was an efficient network that could learn a kind of end-to-end mapping between the LR and HR images without requiring any engineered features and reached the most satisfactory performance at that time. Since then, many studies focused on building a more efficient network to learn the mapping between LR and HR images so that a series of CNNs-based SISR models [2,3,4,5,6,7,8,9] were proposed. EDSR [9] was the champion of the NTIRE2017 SR Challenge. It based on SRResNet [8] while enhanced the network by removing the normalization layers as well as using deeper and wider network structures. These models received excellent performance in terms of peak signal-to-noise ratio (PSNR) and structural similarity index (SSIM [10]) in the SISR problem. Nevertheless, all of these models tend to construct deeper and more complex network structures, which means training these models consumes more resources, time, and tricks. In this work, we have reconstructed some classic SR models, such as SRCNN [1], EDSR [9] and SRResNet [8]. During the reconstruction experiments, we find most existing SR models have the following problems:
(a) Hard to Reproduce: The experimental results manifest that most SR models are sensitive to the subtle network architectural changes and some of them are difficult to reach the level of the original paper due to the lack of the network configuration. Also, the same model achieves different performance by using different training tricks, such as weight initialization, gradient truncation, data normalization and so on. This means that the improvement of the performance may not be owing to the change of the model architecture, but the use of some unknown training tricks.
(b) Inadequate of Features Utilization: Most methods blindly increase the depth of the network in order to enhance the performance of the network but ignore taking full use of the LR image features. As the depth of the network increases, the features gradually disappear in the process of transmission. How to make full use of these features is crucial for the network to reconstruct high-quality images.
(c) Poor Scalability: Using the preprocessed LR image as input will add computational complexity and produce visible artifacts. Therefore, recent approaches pay more attention to amplifying LR images directly. As a result, it is difficult to find a simple SR model that can accommodate to any upscaling factors, or can migrate to any upscaling factors with only minor adjustments to the network architecture.
In order to solve the mentioned problems, we propose a novel multi-scale residual network (MSRN) for SISR. In addition, a multi-scale residual block (MSRB) is put forward as the building module for MSRN. Firstly, we use the MSRB to acquire the image features on different scales, which is considered as local multi-scale features. Secondly, the outputs of each MSRB are combined for global feature fusion. Finally, the combination of local multi-scale features and global features can maximize the use of the LR image features and completely solve the problem that features disappear in the transmission process. Besides, we introduce a convolution layer with 1 \(\times \) 1 kernel as a bottleneck layer to obtain global feature fusion. Furthermore, we utilize a well-designed reconstruction structure that is simple but efficient, and can easily migrate to any upscaling factors.
We train our models on the DIV2K [11] dataset without special weight initialization method or other training tricks. Our base-model shows superior performance over most state-of-the-art methods on benchmark test-datasets. Besides, the model can achieve more competitive results by increasing the number of MSRB or the size of training images. It is more exciting that our MSRB module can be migrate to other restoration models for feature extraction. Contributions of this paper are as follows:
-
Different from previous works, we propose a novel multi-scale residual block (MSRB), which can not only adaptively detect the image features, but also achieve feature fusion at different scales. This is the first multi-scale module based on the residual structure. What’s more, it is easy to train and outperform the existing modules.
-
We extend our work to computer vision tasks and the results exceed those of the state-of-the-art methods in SISR without deep network structure. Besides, MSRB can be used for feature extraction in other restoration tasks which show promising results.
-
We propose a simple architecture for hierarchical features fusion (HFFS) and image reconstruction. It can be easily extended to any upscaling factors.
2 Related Works
2.1 Single-Image Super-Resolution
The SISR problem can be divided into three major stages roughly. Early approaches use interpolation techniques based on sampling theory like linear or bicubic. Those methods run fast, but can not rebuild the detailed, realistic textures. Improved works aim to establish complex mapping functions between LR and HR images. Those methods rely on techniques ranging from neighbor embedding to sparse coding.
Recent works tend to build an end-to-end CNNs model to learn mapping functions from LR to HR images by using large training datasets. Since Dong et al. proposed the SRCNN [1] model, various CNNs architectures have been used on SISR problem. Previous work often used pre-processed LR image as input, which was upscaled to HR space via an upsampling operator as bicubic. However, this method has been proved [2] that it will add computational complexity and produce visible artifacts. To avoid this, new methods are proposed, such as Fast Super-Resolution Convolutional Neural Networks (FSRCNN [3]) and Efficient Sub-pixel Convolutional Networks (ESPCN [2]). All of the models mentioned above are shallow networks (less than 5 layers). Kim et al. [12] first introduced the residual architecture for training much deeper network (20 layers) and achieved great performance. After that, many SR models have been proposed, including DRCN [5], DRNN [7], LapSRN [6], SRResNet [8], and EDSR [9]. Unfortunately, these models become more and more deeper and extremely difficult to train.

The structure of feature extraction blocks: (a) residual block, (b) dense block, and (c) inception block.
2.2 Feature Extraction Block
Nowadays, many feature extraction blocks have been proposed. The main idea of the inception block [13] (Fig. 1(c)) is to find out how an optimal local sparse structure works in a convolutional network. However, these different scale features simply concatenate together, which leads to the underutilization of local features. In 2016, Kim et al. [12] proposed a residual learning framework (Fig. 1(a)) to ease the training of networks so that they could achieve more competitive results. After that, Huang et al. introduced the dense block (Fig. 1(b)). Residual block and dense block use a single size of convolutional kernel and the computational complexity of dense blocks increases at a higher growth rate. In order to solve these drawbacks, we propose a multi-scale residual block.
Based on the residual structure, we introduce convolution kernels of different sizes, which designed for adaptively detecting the features of images at different scales. Meanwhile, a skip connection is applied between different scale features so that the features information can be shared and reused with each other. This helps to fully exploit the local features of the image. In addition, a 1 \(\times \) 1 convolution layer at the end of the block can be used as a bottleneck layer, which contributes to feature fusion and reduces computation complexity. We will give a more detailed description in Sect. 3.1.
3 Proposed Method
In this work, our intent is to reconstruct a super-resolution image \(I^{SR}\) from a low-resolution image \(I^{LR}\). The \(I^{LR}\) is the low-resolution version of \(I^{HR}\), which is obtained by the bicubic operation. We convert the image to the YCbCr color space and train only on the Y channel. For an image with C color channels, we describe the \(I^{LR}\) with a tensor of size \(W \times H \times C\) and denote the \(I^{HR}\), \(I^{SR}\) with \(rW \times rH \times C\), where \(C=1\), represents the Y channel and r represents the upscaling factor.

The complete architecture of our proposed model. The network is divided into feature extraction and reconstruction, different color squares represent different operations, the top-right of the picture gives a specific description.
Our ultimate goal is to learn an end-to-end mapping function F between the \(I^{LR}\) and the \(I^{HR}\). Given a training dataset \(\left\{ I_{i}^{LR}, I_{i}^{HR} \right\} _{i=1}^{N}\), we solve the following problem:
where \(\theta = \left\{ W_1,W_2,W_3...W_m, b_1,b_2,b_3...b_m \right\} \), denotes the weights and bias of our m-layer neural network. \(\mathcal {L}^{SR}\) is the loss function used to minimize the difference between \(I_{i}^{SR}\) and \(I_{i}^{HR}\). Recently, researchers also focus on finding a superior loss function to improve the network performance. The most widely-used image objective optimization functions are the MSE function and L2 function. Although these methods can obtain high PSNR/SSIM, solutions for MSE optimization and L2 optimization problems often produce excessively smooth textures. Now, a variety of loss functions have been proposed such as VGG [4] function and Charbonnier Penalty function [6]. On the contrary, we find that their performance improvement is marginal. In order to avoid introducing unnecessary training tricks and reduce computations, we finally choose the L1 function. Thus, the loss function \(\mathcal {L}^{SR}\) can be defined as:
As shown in Fig. 2, it is the complete architecture of our proposed model. Our model takes the unprocessed LR images as input, which are directly upsampled to high-resolution space via the network. Our model can be divided into two parts: the feature extraction module and the image reconstruction module. The feature extraction module is composed of two structures: multi-scale residual block (MSRB) and hierarchical feature fusion structure (HFFS).

The structure of multi-scale residual block (MSRB).
3.1 Multi-scale Residual Block (MSRB)
In order to detect the image features at different scales, we propose multi-scale residual block (MSRB). Here we will provide a detailed description of this structure. As shown in Fig. 3, our MSRB contains two parts: multi-scale features fusion and local residual learning.
Multi-scale Features Fusion: Different from previous works, we construct a two-bypass network and different bypass use different convolutional kernel. In this way, the information between those bypass can be shared with each other so that able to detect the image features at different scales. The operation can be defined as:
where w and b represent the weights and bias respectively, and the superscripts represent the number of layers at which they are located, while the subscripts represent the size of the convolutional kernel used in the layer. \(\sigma (x) = max(0, x)\) stands for the ReLU function, and \([S_1, p_1]\), \([P_1, S_1]\), \([S_2, P_2]\) denote the concatenation operation.
Let M denote the number of feature maps sent to the MSRB. So the input and output of the first convolutional layer have M feature maps. And the second convolutional layer has 2M feature maps, either input or output. All of these feature maps are concatenated and sent to a \(1\times 1\) convolutional layer. This layer reduces the number of these feature maps to M, thus the input and output of our MSRB have the same number of feature maps. The distinctive architecture allows multiple MSRBs to be used together.
Local Residual Learning: In order to make the network more efficient, we adopt residual learning to each MSRB. Formally, we describe a multi-scale residual block (MSRB) as:
where \(M_n\) and \(M_{n-1}\) represent the input and output of the MSRB, respectively. The operation \(S^{'} + M_{n-1}\) is performed by a shortcut connection and element-wise addition. It is worth mentioning that the use of local residual learning makes the computational complexity greatly reduced. Simultaneously, the performance of the network is improved.
3.2 Hierarchical Feature Fusion Structure (HFFS)
For SISR problem, input and output images are highly correlated. It is crucial to fully exploit the features of the input image and transfer them to the end of the network for reconstruction. However, as the depth of the network increases these features gradually disappear during transmission. Driven by this problem, various methods have been proposed, among which the skip connection is the most simple and efficient method. All of these methods try to create different connections between different layers. Unfortunately, these methods can’t fully utilize the features of the input image, and generate too much redundant information for aimlessness.
In the experiment, we notice that with the growth of depth, the spatial expression ability of the network gradually decreases while the semantic expression ability gradually increases. Additionally, the output of each MSRB contains distinct features. Therefore, how to make full use of these hierarchical features will directly affect the quality of reconstructed images. In this work, a simple hierarchical feature fusion structure is utilized. We send all the output of the MSRB to the end of the network for reconstruction. On the one hand, these feature maps contain a large amount of redundant information. On the other hand, using them directly for reconstruction will greatly increase the computational complexity. In order to adaptively extract useful information from these hierarchical features, we introduce a bottleneck layer which is essential for a convolutional layer with 1 \(\times \) 1 kernel. The output of hierarchical feature fusion structure (HFFS) can be formulated as:
where \(M_0\) is the output of the first convolutional layer, \(M_i (i\ne 0)\) represents the output of the \(i^{th}\) MSRB, and \([M_0, M_1, M_2,...,M_N]\) denotes the concatenation operation.
3.3 Image Reconstruction
The previous work paid close attention to learn a mapping function between LR and HR images, where the LR image was upsampled to the same dimensions as HR by bicubic. Yet, this approach introduced redundant information and increased the computational complexity. Inspired by it, recent work tends to use the un-amplified LR as the input image to train a network that can be directly upsampled to HR dimensions. Instead, it is difficult to find an SR model which is able to migrate to any upscaling factors with only minor adjustments to the network architecture. Moreover, most of these networks tend to be a fixed upscaling factor (x4), with no specific instructions given to migrate to other upscaling factors.

Comparison of some common image reconstruction structure (\(\times \)4).
PixelShuffle [2] and deconvolutional layer are widely used in SISR tasks. As shown in Fig. 4, there are several common reconstruction modules. Taking the upscaling factor of \(\times \)4 as an example, all of these modules use pixelShuffle or deconvolution operation and the SR image is reconstructed gradually with upscaling factor 2 as the base. However, as the upscaling factor increases (e.g. \(\times \)8), the network becomes deeper accompanied with more uncertain training problems. Moreover, these methods does not work on odd upscaling factors, while one might expect a tardy growth in upscaling factor (e.g. \(\times \)2, \(\times \)3, \(\times \)4, \(\times \)5) rather than exponential increase.
For this purpose, we put forward a new reconstruction module (Fig. 4(ours)), which is a simple, efficient, and flexible structure. Thanks to pixelshuffle [2], our modules can be migrated to any upscaling factor with minor adjustments. In Table 1. We provide thorough configuration information about the reconstruction structure. In our network, for different upscaling factors, we only need to change the value of M whose change is negligible. Experiments indicate that this structure performs well on different upscaling factors.
4 Experiments
In this section, we evaluate the performance of our model on several benchmark test-datasets. We first introduce the dataset used for training and testing, then we give implementation details. Next, we compare our model with several state-of-the-art methods. Finally, we give a series of qualitative analysis experiments results. In addition, we show some of the results on other low-level computer vision tasks with our MSRB.
4.1 Datasets
The most widely used training dataset in previous studies includes 291 images, of which 91 images are from [14] and the other 200 images are from [15]. And some methods take ImageNet [16] as training dataset, since it contains richer samples. In our work, we choose DIV2K [11] as our training dataset, a new high-quality image dataset for image restoration challenge. During testing, we choose five widely used benchmark datasets: Set5 [17], Set14 [18], BSDS100 [19], Urban100 [20] and Manga109 [21]. These datasets contain a wide variety of images that can fully verify our model. Following previous works, all our training and testing are based on luminance channel in YCbCr colour space, and upscaling factors: \(\times \)2, \(\times \)3, \(\times \)4, \(\times \)8 are used for training and testing.
4.2 Implementation Details
Following [6], we augment the training data in three ways: (1) scaling (2) rotation (3) flipping. In each training batch, we randomly extract 16 LR patches with the size of 64\(\times \)64 and an epoch having 1000 iterations of back-propagation. We train our model with ADAM optimizer [22] by setting the learning rate \(lr=0.0001\). In our final model, we use 8 multi-scale residual blocks (MSRB, \(N=8\)) and the output of each MSRB has 64 feature maps. Simultaneously, the output of each bottleneck layer (1 \(\times \) 1 convolutional layer) has 64 feature maps. We implement MSRN with the Pytorch framework and train them using NVIDIA Titan Xp GPU. We do not use a special weight initialization method or other training tricks, and code is available at https://github.com/MIVRC/MSRN-PyTorch.
4.3 Comparisons with State-of-the-art Methods
We compare our model with 10 state-of-the-art SR methods, including Bicubic, A+ [23], SelfExSR [20], SRCNN [1], ESPCN [2], FSRCNN [3], VDSR [4], DRCN [5], LapSRN [6] and EDSR [9]. For fair, we retrain most of these models (except for EDSR [9], the results of EDSR provided by their original papers). Taking the equality of comparison into account, we evaluate the SR images with two commonly-used image quality metrics: PSNR and SSIM. Moreover, all the reported PSNR/SSIM measures are calculated on the luminance channel and remove M-pixel from each border (M stands for the upscaling factor).

The evaluation results of the SR method including our model and 10 state-of-art methods are demonstrated in Table 2. Our model outperforms by a large margin on different upscaling factors and test-datasets. It can be seen that our results are slightly lower than EDSR [9]. But it is worth noting that EDSR [9] use RGB channels for training, meanwhile, the data augment methods are different. To better illustrate the difference with EDSR [9], we show a comparison of model specifications in Table 3. EDSR [9] is an outstanding model gained amazing results. However, it is a deep and wide network which contains large quantities of convolutional layers and parameters. In other words, training this model will cost more memory, space and datasets. In contrast, the specifications of our model is much smaller than EDSR [9], which makes it easier to reproduce and promote.
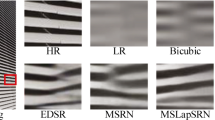
In Figs. 6 and 7 we present visual performance on different datasets with different upscaling factors. Our model can reconstruct sharp and natural images, as well as outperforms other state-of-the-art methods. This is probably owing to the MSRB module can detect the image features at different scales and use them for reconstruction. For better illustration, more SR images reconstructed by our model can be found at https://goo.gl/bGnZ8D.

Visual comparison for \(\times \)2, \(\times \)3, \(\times \)4 SR images. Our MSRN can reconstruct realistic images with sharp edges.

Visual comparison of MSRN with other SR methods on large-scale (\(\times \)8) SR task. Obviously, MSRN can reconstruct realistic images with sharp edges.
4.4 Qualitative Analysis
Benefit of MSRB: In this work, we propose an efficient feature extraction structure: multi-scale residual block. This module can adaptively detect image features at different scales and fully exploit the potential features of the image. To validate the effectiveness of our module, we design a set of comparative experiments to compare the performance with residual block [12], dense block [24] and MSRB in SISR tasks. Based on the MSRN architecture, we replace the feature extraction block in the network. The three networks contain different feature extraction block, and each network contains only one feature extraction block. For quick verification, we use a small training dataset in this part, and all these models are trained in the same environment by \(10^5\) iterations. The results (Fig. 5) show that our MSRB module is superior to other modules at all upsampling factors. As shown in Fig. 9, we visualize the output of these feature extraction blocks. It deserves to notice that the activations are sparse (most values are zero, as the visualization shown in black) and some activation maps may be all zero which indicates dead filters. It is obvious that the output of the MSRB contains more valid activation maps, which further proves the effectiveness of the structure.

Performance comparison of MSRN with different number of MSRBs.

Benefit of Increasing the Number of MSRB: As is acknowledged, increasing the depth of the network can effectively improve the performance. In this work, adding the number of MSRBs is the simplest way to gain excellent result. In order to verify the impact of the number of MSRBs on network, we design a series of experiments. As shown in Fig. 8, our MSRN performance improves rapidly with the number of MSRBs growth. Although the performance of the network will further enhance by using more MSRB, but this will lead to a more complex network. While weighing the network performance and network complexity, we finally use 8 MSRBs, the result is close to EDSR, but the number of model parameters is only one-seventh of it.
Performance on Other Tasks: In order to further verify the validity of our proposed MSRB module, we apply it to other low-level computer vision tasks for feature extraction. As shown in Fig. 10, we provide the results of image-denoising and image-dehazing, respectively. It is obvious that our model achieves promising results on other low-level computer vision tasks.

Application examples for image denoising and image dehazing, respectively.
5 Discussion and Future Works
Many training tricks have been proposed to make the reconstructed image more realistic in SISR. For example, multi-scale (the scale here represents the upscaling factor) mixed training method is used in [4, 9], and geometric selfensemble method is proposed in [9]. We believe that these training tricks can also improve our model performance. However, we are more inclined to explore an efficient model rather than use training tricks. Although our model has shown superior performance, the reconstructed image is still not clear enough under large upscaling factors. In the future work, we will pay more attention to large-scale downsampling image reconstruction.
6 Conclusions
In this paper, we proposed an efficient multi-scale residual block (MSRB), which is used to adaptively detect the image features at different scales. Based on MSRB, we put forward multi-scale residual network (MSRN). It is a simple and efficient SR model so that we can fully utilize the local multi-scale features and the hierarchical features to obtain accurate SR image. Additionally, we achieved promising results by applying the MSRB module to other computer vision tasks such as image-denoising and image-dehazing.
References
Dong, C., Loy, C.C., He, K., Tang, X.: Learning a deep convolutional network for image super-resolution. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8692, pp. 184–199. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10593-2_13
Shi, W. et al.: Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1874–1883 (2016)
Dong, C., Loy, C.C., Tang, X.: Accelerating the super-resolution convolutional neural network. In: Leibe, B., Matas, J., Sebe, N., Welling, M. (eds.) ECCV 2016. LNCS, vol. 9906, pp. 391–407. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-46475-6_25
Kim, J., Kwon Lee, J., Mu Lee, K.: Accurate image super-resolution using very deep convolutional networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1646–1654 (2016)
Kim, J., Kwon Lee, J., Mu Lee, K.: Deeply-recursive convolutional network for image super-resolution. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1637–1645 (2016)
Lai, W.S., Huang, J.B., Ahuja, N., Yang, M.H.: Deep laplacian pyramid networks for fast and accurate superresolution. In: IEEE Conference on Computer Vision and Pattern Recognition, vol. 2, p. 5 (2017)
Tai, Y., Yang, J., Liu, X.: Image super-resolution via deep recursive residual network. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, vol. 1, p. 5 (2017)
Ledig, C., et al.: Photo-realistic single image superresolution using a generative adversarial network. In: The IEEE Conference on Computer Vision and Pattern Recognition, vol. 2, p. 4 (2017)
Lim, B., Son, S., Kim, H., Nah, S., Lee, K.M.: Enhanced deep residual networks for single image super-resolution. In: The IEEE Conference on Computer Vision and Pattern Recognition Workshops. vol. 1, p. 4 (2017)
Wang, Z., Bovik, A.C., Sheikh, H.R., Simoncelli, E.P.: Image quality assessment: from error visibility to structural similarity. IEEE Trans. Image Process. 13(4), 600–612 (2004)
Agustsson, E., Timofte, R.: Ntire 2017 challenge on single image super-resolution: dataset and study. In: The IEEE Conference on Computer Vision and Pattern Recognition Workshops, vol. 3, p. 2 (2017)
He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 770–778 (2016)
Szegedy, C., et al.: Going deeper with convolutions. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1–9 (2015)
Yang, J., Wright, J., Huang, T.S., Ma, Y.: Image super-resolution via sparse representation. IEEE Trans. Image Process. 19(11), 2861–2873 (2010)
Martin, D., Fowlkes, C., Tal, D., Malik, J.: A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In: Proceedings Eighth IEEE International Conference on Computer Vision, pp. 416–423 (2001)
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S., Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bernstein, M.: Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 115(3), 211–252 (2015)
Bevilacqua, M., Roumy, A., Guillemot, C., Alberi-Morel, M.L.: Low-complexity single-image super-resolution based on nonnegative neighbor embedding. In: Proceedings of the 23rd British Machine Vision Conference. (2012)
Zeyde, R., Elad, M., Protter, M.: On single image scale-up using sparse-representations. In: Boissonnat, J.-D., Chenin, P., Cohen, A., Gout, C., Lyche, T., Mazure, M.-L., Schumaker, L. (eds.) Curves and Surfaces 2010. LNCS, vol. 6920, pp. 711–730. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-27413-8_47
Arbelaez, P., Maire, M., Fowlkes, C., Malik, J.: Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 33(5), 898–916 (2011)
Huang, J.B., Singh, A., Ahuja, N.: Single image super-resolution from transformed self-exemplars. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 5197–5206 (2015)
Matsui, Y., Ito, K., Aramaki, Y., Fujimoto, A., Ogawa, T., Yamasaki, T., Aizawa, K.: Sketch-based manga retrieval using manga109 dataset. Multimed. Tools Appl. 76(20), 21811–21838 (2017)
Kingma, D.P., Ba, J.L.: Adam: a method for stochastic optimization. In: Proceedings of the 3rd International Conference on Learning Representations (2014)
Timofte, R., De Smet, V., Van Gool, L.: A+: adjusted anchored neighborhood regression for fast super-resolution. In: Cremers, D., Reid, I., Saito, H., Yang, M.-H. (eds.) ACCV 2014. LNCS, vol. 9006, pp. 111–126. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-16817-3_8
Huang, G., Liu, Z., Weinberger, K.Q., van der Maaten, L.: Densely connected convolutional networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, vol. 1, p. 3 (2017)
Acknowledgments
This work are sponsored by the key project of the National Natural Science Foundation of China (No. 61731009), the National Science Foundation of China (No. 61501188), the “Chenguang Program” supported by Shanghai Education Development Foundation and Shanghai Municipal Education Commission (No. 17CG25) and East China Normal University.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Li, J., Fang, F., Mei, K., Zhang, G. (2018). Multi-scale Residual Network for Image Super-Resolution. In: Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y. (eds) Computer Vision – ECCV 2018. ECCV 2018. Lecture Notes in Computer Science(), vol 11212. Springer, Cham. https://doi.org/10.1007/978-3-030-01237-3_32
Download citation
DOI: https://doi.org/10.1007/978-3-030-01237-3_32
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01236-6
Online ISBN: 978-3-030-01237-3
eBook Packages: Computer ScienceComputer Science (R0)