
Abstract—
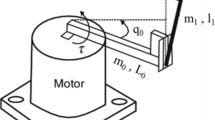
The task of managing unstable systems is a critically important management problem, as an unstable object can pose significant danger to humans and the environment when it fails. In this paper, a neural network was trained to determine the optimal control for an unstable system, based on a comparative analysis of two control methods: the implicit Euler method and the linearization method. This neural network identifies the optimal control based on the position of a point on the phase plane.












Similar content being viewed by others

REFERENCES
Paredes, V.C. and Hereid, A., Resolved motion control for 3D underactuated bipedal walking using linear inverted pendulum dynamics and neural adaptation, 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 6761–6767. https://doi.org/10.1109/IROS47612.2022.9982009
Shanmugam, L., Mani, P., and Joo, Y.H., Stabilization of event-triggered-based neural network control system and its application to wind power generation systems, IET Control Theory Appl., 2020, vol. 14, no. 10, pp. 1321–1333. https://doi.org/10.1049/iet-cta.2019.0246
Mukhtar Fatihu Hamza, Hwa Jen Yap, Imtiaz Ahmed Choudhury, Abdulbasid Ismail Isa, Aminu Yahaya Zimit, and Tufan Kumbasar, Current development on using Rotary Inverted Pendulum as a benchmark for testing linear and nonlinear control algorithms, Mech. Syst. Signal Process., 2019, no. 116, pp. 347–369. https://doi.org/10.1016/j.ymssp.2018.06.054
Kozlov, D.S. and Tiumentsev, Y.V., Neural network based semi-empirical models for dynamical systems described by differential-algebraic equations, Opt. Mem. Neural Networks, 2015 no. 24, pp. 279–287. https://doi.org/10.3103/S1060992X15040049
Kolganov, P.A., Kondratiev, A.I., Tiumentsev, A.Y., et al., Neural network nonlinear adaptive fault tolerant motion control for unmanned aerial vehicles, Opt. Mem. Neural Networks, 2022, no. 31, pp. 1–15. https://doi.org/10.3103/S1060992X22010064
Liu, Zhitai; Gao, Huijun; Yu, Xinghu; Lin, Weiyang, Qiu, Jianbin, Rodriguez-Andina, Juan J., Qu, Dongsheng, B-spline wavelet neural network-based adaptive control for linear motor-driven systems via a novel gradient descent algorithm, IEEE Trans. Ind. Electron., 2023, pp. 1–10, https://doi.org/10.1109/TIE.2023.3260318
Bottcher, L. and Asikis, T., Near-optimal control of dynamical systems with neural ordinary differential equations, Mach. Learn.: Sci. Technol., 2022, no. 3, 045004
Lim, H.-K., Kim, J.-B., Kim, C.-M., Hwang, G.-Y., Choi, H.-B., and Han, Y.-H., Federated reinforcement learning for controlling multiple rotary inverted pendulums in edge computing environments, 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 2020, pp. 463–464. https://doi.org/10.1109/ICAIIC48513.2020.9065233
Yi Ming Ren, Alhajeri, M.S., Junwei Luo, Scarlett Chen, Fahim Abdullah, Zhe Wu, and Christofides, P.D., A tutorial review of neural network modeling approaches for model predictive control, Comput. Chem. Eng., 2022, vol. 165, 107956, doi.org/https://doi.org/10.1016/j.compchemeng.2022.107956
Ronzhina, M.I. and Manita, L.A., Spiral-like extremals near a singular surface in a rocket control problem, Regular Chaotic Dyn., 2023, vol. 28, no. 2, pp. 148–161.
Ma, L. and Kong, Q., Optimal shortcuts to adiabatic control by lagrange mechanics. Entropy, 2023, vol. 25, no. 5, p. 719.
Pontryagin, L.S., Mathematical theory of optimal processes, Classics of Soviet Mathematics, CRC Press, 1987.
Lazovskaya, T. and Tarkhov, D., Multilayer neural network models based on grid methods, IOP Conf. Ser.: Mater. Sci. Eng., vol. 158, no. 1, p. 012061.
Tarkhov, D., Lazovskaya, T., and Malykhina, G., Constructing physics-informed neural networks with architecture based on analytical modification of numerical methods by solving the problem of modelling processes in a chemical reactor, Sensors, 2023, vol. 23, p. 663. https://doi.org/10.3390/s23020663
Hairer, E., Norsett, S.P, and Wanner, G., Solving Ordinary Differential Equations I: Nonstiff Problems, Springer Science & Business Media, 2008.
Degilevich, E.A. et al., Comparative testing of the neural network and semi-empirical method on the stabilization problem of inverted pendulum, in Advances in Neural Computation, Machine Learning, and Cognitive Research II. NEUROINFORMATICS 2018, Studies in Computational Intelligence, Kryzhanovsky, B., Dunin-Barkowski, W., Redko, V., and Tiumentsev, Y., Eds., 2019, p. 799. https://doi.org/10.1007/978-3-030-01328-8_10
Funding
This work was supported by the Russian Science Foundation, grant no. 22-21-20004, https://rscf.ru/project/22-21-20004/.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors of this work declare that they have no conflicts of interest.
About this article

Cite this article
Tarkhov, D.A., Lavygin, D.A., Skripkin, O.A. et al. Optimal Control Selection for Stabilizing the Inverted Pendulum Problem Using Neural Network Method. Opt. Mem. Neural Networks 32 (Suppl 2), S214–S225 (2023). https://doi.org/10.3103/S1060992X23060115
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1060992X23060115